




An Incremental Broad-Learning-System-Based Approach for Tremor Attenuation for Robot Tele-Operation



Abstract
:1. Introduction
- Unlike high-complexity deep learning networks, a simple and efficient network, broad learning system (BLS), is applied in tele-operation systems as a tremor filter, which overcomes the shortcomings of traditional deep neural networks by using the pseudo-inverse calculation. Due to the ill-posed problem, we combine the BLS with the ridge regression approach.
- Traditional batch-learning algorithms require a lot of time and computing resources, and they are limited in dealing with mass data. To solve the problem, incremental learning algorithms are introduced to rebuild the network model online, which can improve the model performance.
- A novel sliding mode controller is raised. The previous work [23] combined with the PD controller to achieve tremor canceling, and there was still room for improvement in tracking accuracy and robustness. Thus, in this paper, we apply a superior controller to control the slave robot.
2. Problem Description
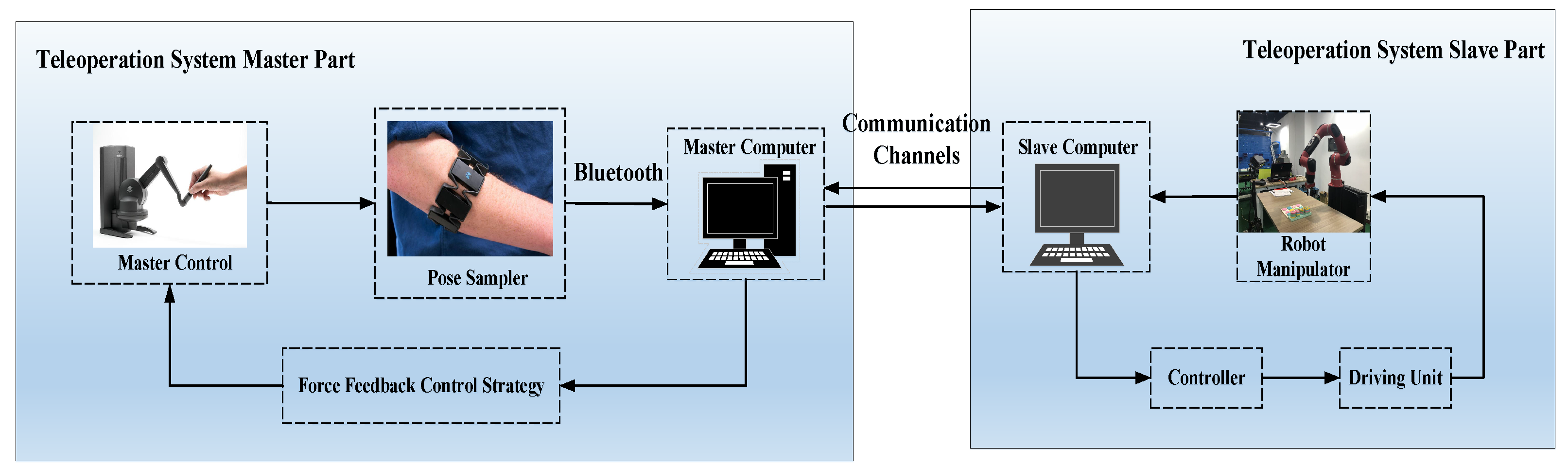
2.1. Tele-Operated Robot System
- Haptic device and sampling device: The haptic device contains a six degrees of freedom (DOFs), where the first three are used to describe the position of the haptic device, and the last three are used to describe the orientation of the haptic device. The sampling device (Myo armband) has eight electromyography (EMG) electrodes and one nine-axis inertial measurement unit (IMU), which can obtain the change in human arm muscle bioelectricity versus time.
- Communication channels: Bluetooth technology eliminates the need for wires between master devices and slave devices through wireless connections. Master–slave computers can communicate with each other at a certain distance through a wireless receiver on the chip.
- Slave robot manipulator: A multi-DOFs robot manipulator is used as the slave control object, which is equipped with force sensors and electric servers on each joint, where electric servers include the control circuit, direct current (DC) motor, and reduction gear set.
2.2. Master Joints Analysis
2.3. Workspace Description
3. Control Strategies
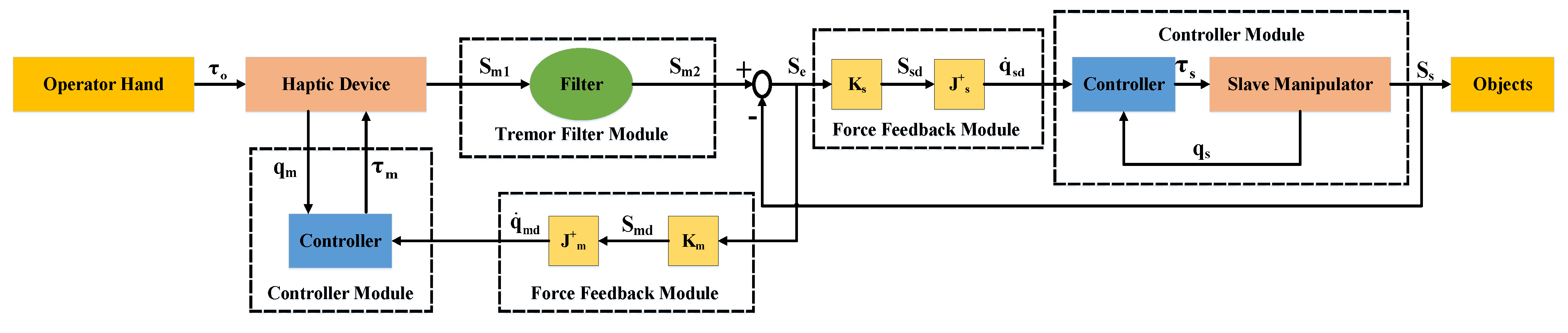
3.1. Force Feedback Control
3.2. Sliding Mode Controller
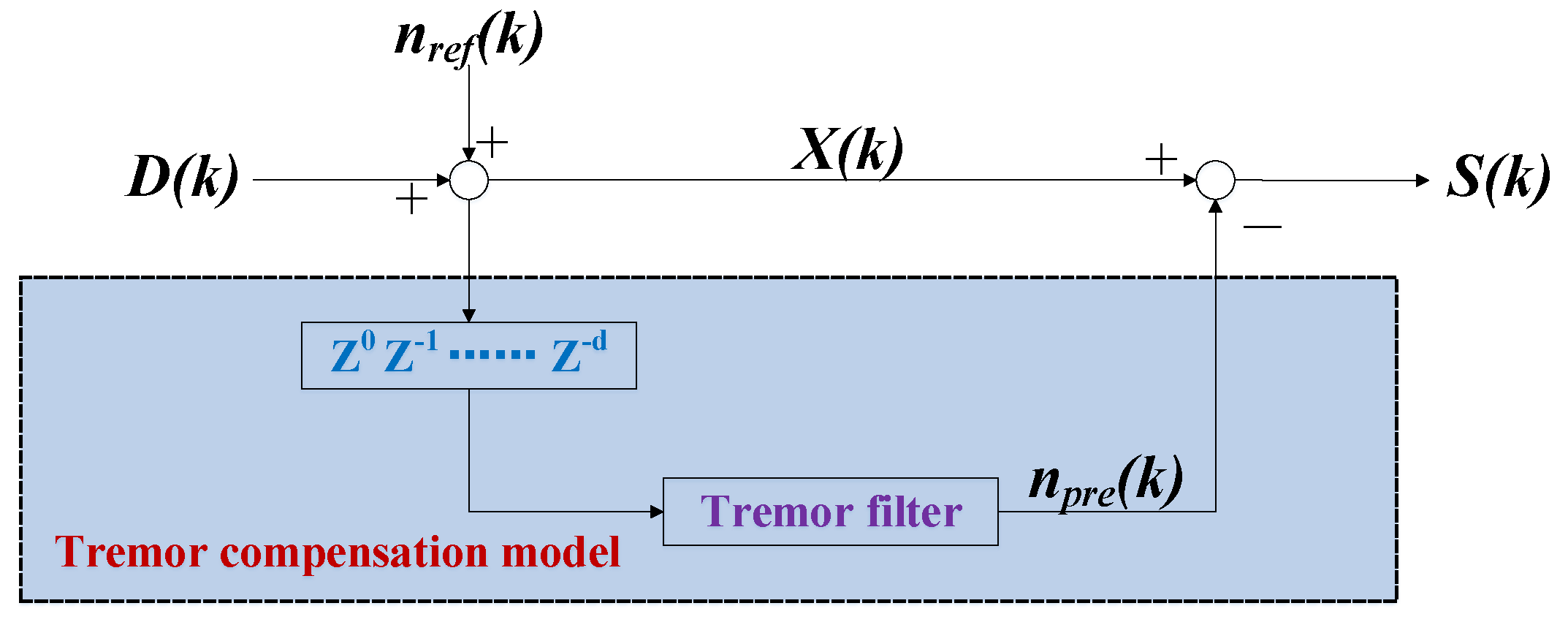
3.3. Tremor Attenuation Filter
4. Design of Broad-Learning-System-Based Tremor Filter
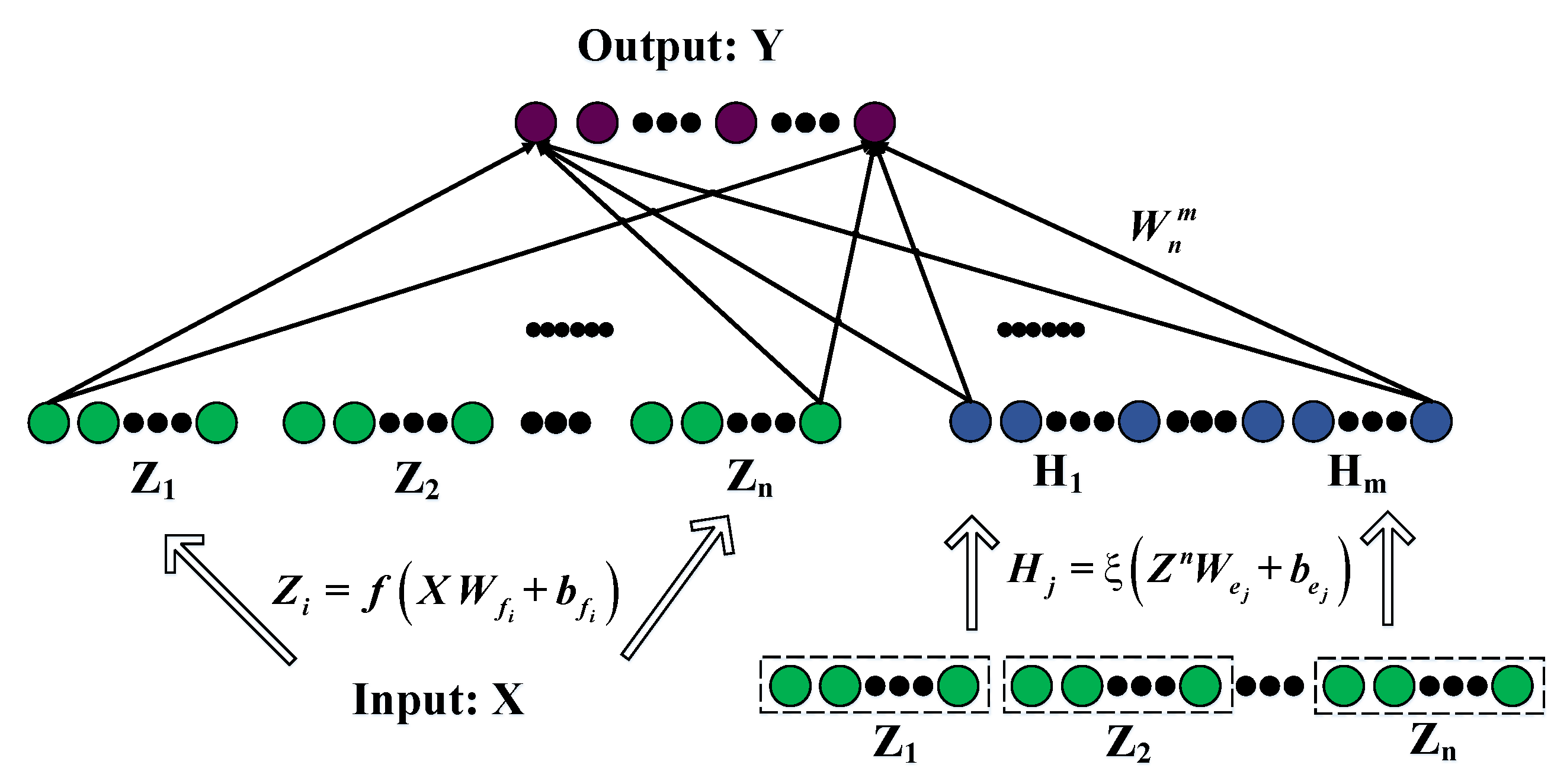
4.1. Broad Learning System
4.2. Incremental Learning Methods
4.2.1. Increment of Additional Enhancement Nodes
4.2.2. Increment of Additional Feature Mapping Nodes
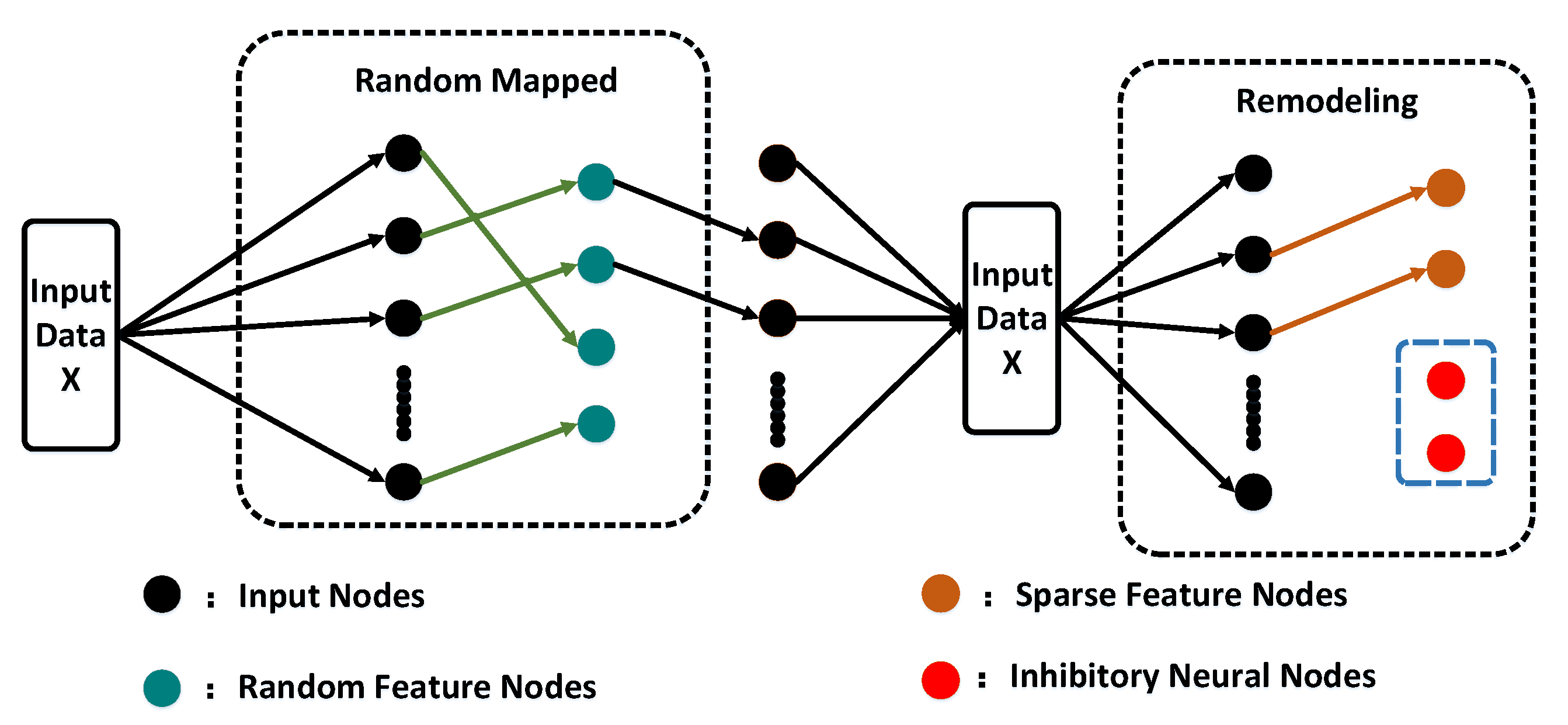
4.3. Sparse Autoencoder
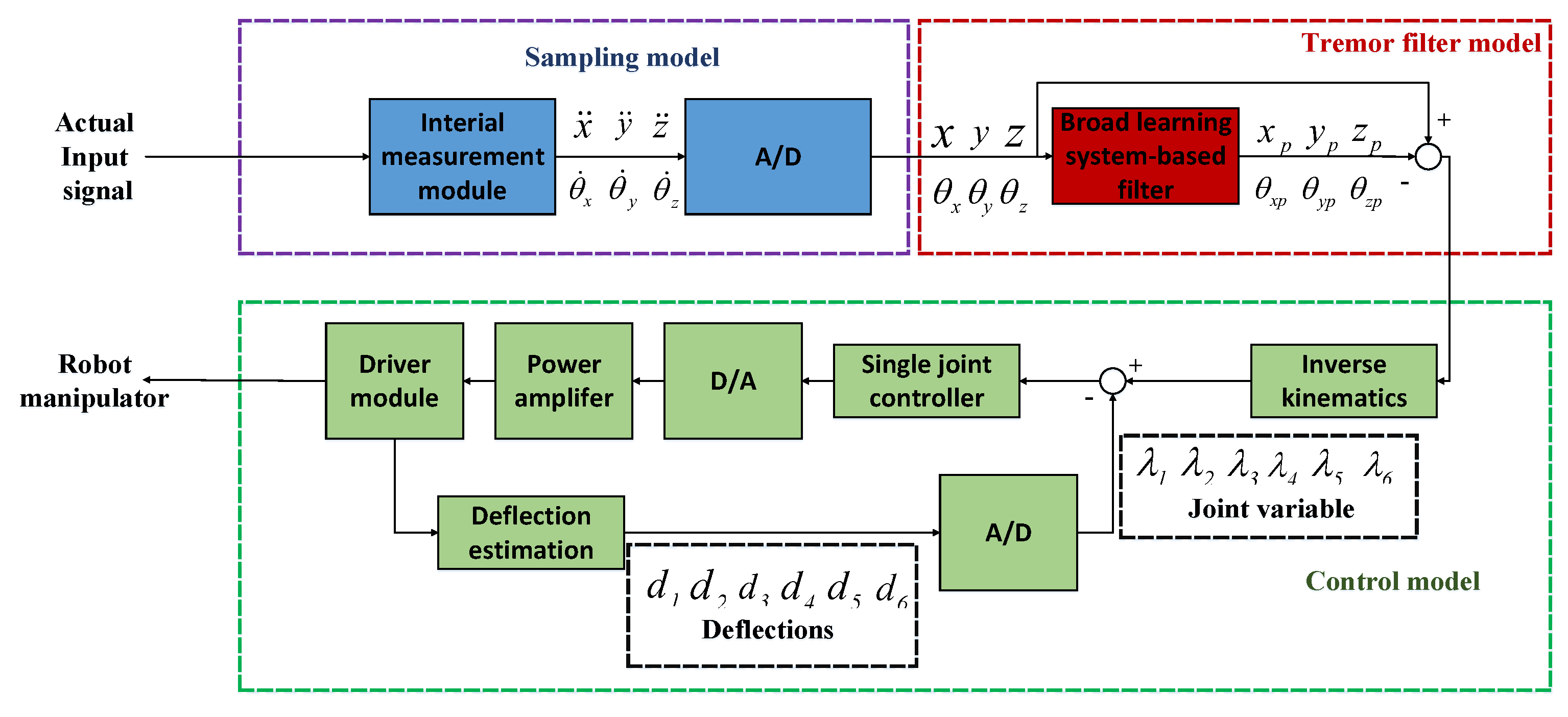
4.4. Physical Model Structure of BLSF
5. Simulation Experiments
5.1. Model Evaluation Metrics
5.2. Data Pre-Processing
5.3. Parameter Settings
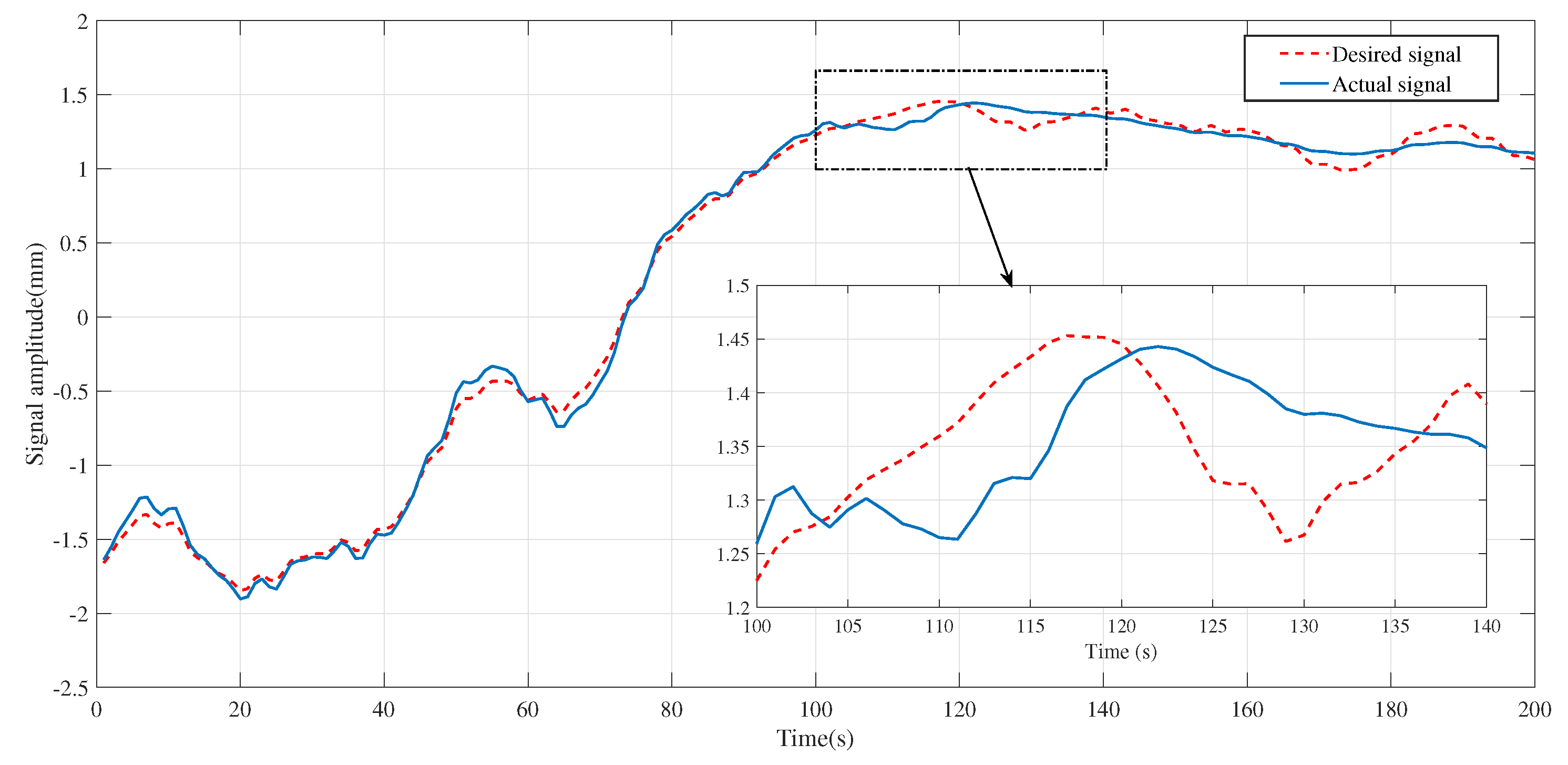
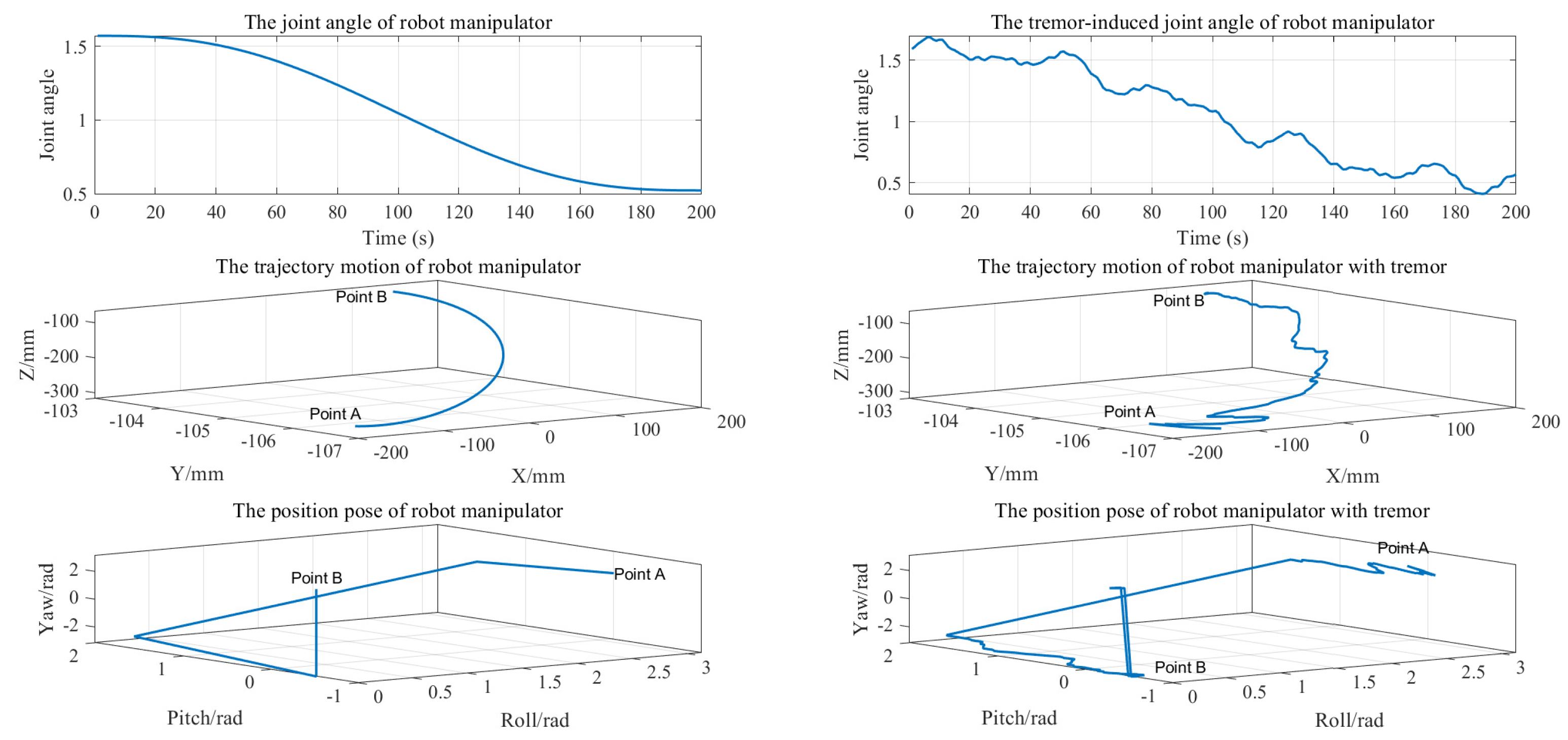
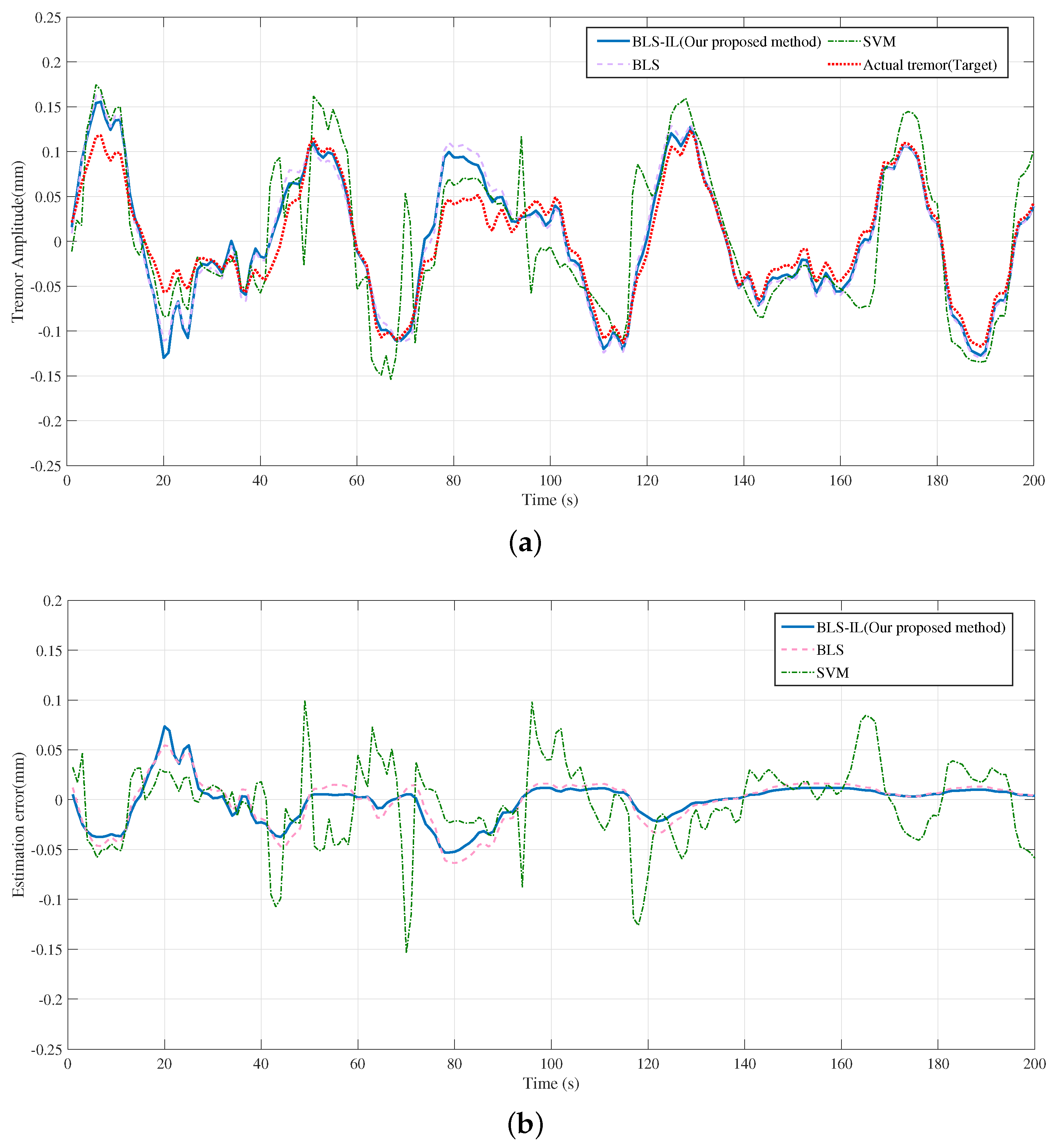
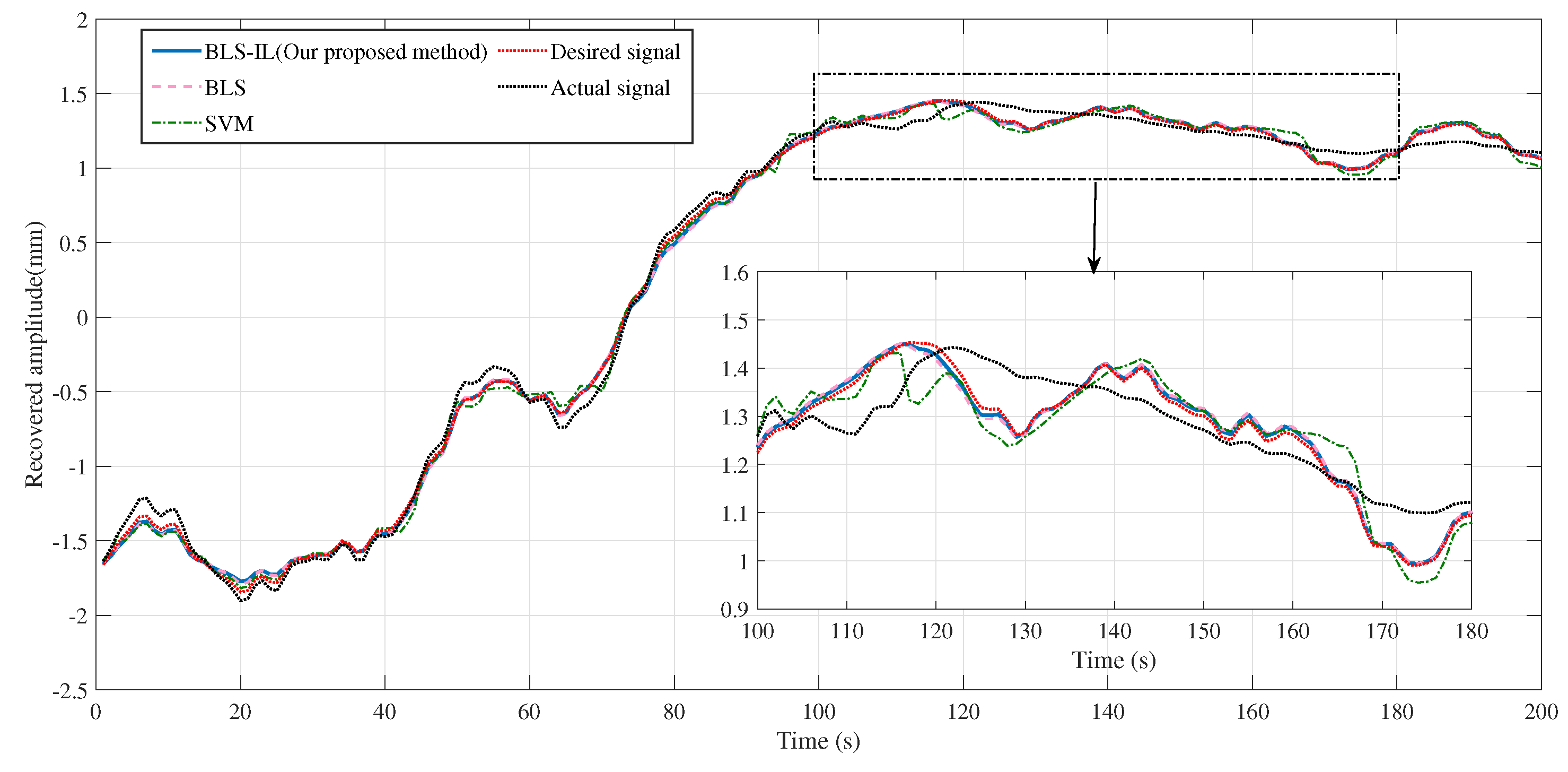
6. Tremor Forecast Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Xu, W.; Peng, J.; Liang, B.; Mu, Z. Hybrid modeling and analysis method for dynamic coupling of space robots. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 85–98. [Google Scholar] [CrossRef]
- Chen, H.; Huang, P.; Liu, Z.; Ma, Z. Time delay prediction for space telerobot system with a modified sparse multivariate linear regression method. Acta Astronaut. 2020, 166, 330–341. [Google Scholar] [CrossRef]
- Ehrampoosh, A.; Shirinzadeh, B.; Pinskier, J.; Smith, J.; Moshinsky, R.; Zhong, Y. A Force-Feedback Methodology for Teleoperated Suturing Task in Robotic-Assisted Minimally Invasive Surgery. Sensors 2022, 22, 7829. [Google Scholar] [CrossRef] [PubMed]
- Zhi, L.; Wu, Q.; Yun, Z.; Wang, Y.; Chen, C. Adaptive fuzzy wavelet neural network filter for hand tremor canceling in microsurgery. Appl. Soft Comput. 2011, 11, 5315–5329. [Google Scholar]
- Liu, Z.; Mao, C.; Luo, J.; Zhang, Y.; Chen, C.P. A three-domain fuzzy wavelet network filter using fuzzy PSO for robotic assisted minimally invasive surgery. Knowl. Based Syst. 2014, 66, 13–27. [Google Scholar] [CrossRef]
- Tatinati, S.; Veluvolu, K.C.; Ang, W.T. Multistep Prediction of Physiological Tremor Based on Machine Learning for Robotics Assisted Microsurgery. IEEE Trans. Cybern. 2015, 45, 328–339. [Google Scholar] [CrossRef]
- Latt, W.T.; Veluvolu, K.C.; Ang, W.T. Drift-Free Position Estimation of Periodic or Quasi-Periodic Motion Using Inertial Sensors. Sensors 2011, 11, 5931–5951. [Google Scholar] [CrossRef]
- Li, X.; Guo, S.; Shi, P.; Jin, X.; Kawanishi, M.; Suzuki, K. A Bimodal Detection-Based Tremor Suppression System for Vascular Interventional Surgery Robots. IEEE Trans. Instrum. Meas. 2022, 71, 1–12. [Google Scholar] [CrossRef]
- Zheng, L.; Guo, S.; Zhang, L. Preliminarily Design and Evaluation of Tremor Reduction Based on Magnetorheological Damper for Catheter Minimally Invasive Surgery. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; pp. 2229–2234. [Google Scholar] [CrossRef]
- Guo, J.; Yang, S.; Guo, S. Study on the Tremor Elimination Strategy for the Vascular Interventional Surgical Robot. In Proceedings of the 2020 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2020; pp. 1547–1552. [Google Scholar] [CrossRef]
- Mellone, S.; Palmerini, L.; Cappello, A.; Chiari, L. Hilbert–Huang-Based Tremor Removal to Assess Postural Properties from Accelerometers. IEEE Trans. Biomed. Eng. 2011, 58, 1752–1761. [Google Scholar] [CrossRef]
- Riley, P.O.; Rosen, M.J. Evaluating manual control devices for those with tremor disability. J. Rehabil. Res. Dev. 1987, 24, 99. [Google Scholar]
- Wei, T.A.; Khosla, P.K.; Riviere, C.N. Kalman filtering for real-time orientation tracking of handheld microsurgical instrument. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004. [Google Scholar]
- Wang, Y.; Veluvolu, K.C. Time-frequency decomposition of band-limited signals with bmflc and kalman filter. In Proceedings of the 2012 7th IEEE Conference on Industrial Electronics and Applications (ICIEA), Singapore, 18–20 July 2012. [Google Scholar]
- Tatinati, S.; Veluvolu, K.C.; Hong, S.M.; Latt, W.T.; Ang, W.T. Physiological tremor estimation with autoregressive (ar) model and kalman filter for robotics applications. IEEE Sensors J. 2013, 13, 4977–4985. [Google Scholar] [CrossRef]
- Veluvolu, K.C.; Tatinati, S.; Hong, S.M.; Ang, W.T. Multistep prediction of physiological tremor for surgical robotics applications. IEEE Trans. Biomed. Eng. 2013, 60, 3074–3082. [Google Scholar] [CrossRef]
- Ghassab, V.K.; Mohammadi, A.; Atashzar, S.F.; Patel, R.V. Dynamic estimation strategy for e-bmflc filters in analyzing pathological hand tremors. In Proceedings of the 2017 IEEE Global Conference on Signal and Information Processing (GlobalSIP), Montreal, QC, Canada, 14–16 November 2017. [Google Scholar]
- Yang, C.; Luo, J.; Pan, Y.; Liu, Z.; Su, C.Y. Personalized variable gain control with tremor attenuation for robot teleoperation. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1759–1770. [Google Scholar] [CrossRef]
- Liu, Z.; Luo, J.; Wang, L.; Zhang, Y.; Chen, C.L.P.; Chen, X. A time-sequence-based fuzzy support vector machine adaptive filter for tremor cancelling for microsurgery. Int. J. Syst. Sci. 2015, 46, 1131–1146. [Google Scholar] [CrossRef]
- Du, F.; Zhang, J.; Ji, N.; Shi, G.; Zhang, C. An effective hierarchical extreme learning machine based multimodal fusion framework. Neurocomputing 2018, 322, 141–150. [Google Scholar] [CrossRef]
- Yue, B.; Wang, S.; Liang, X.; Jiao, L. An external learning assisted self-examples learning for image super-resolution. Neurocomputing 2018, 312, 107–119. [Google Scholar] [CrossRef]
- Salaken, S.M.; Khosravi, A.; Nguyen, T.; Nahavandi, S. Extreme learning machine based transfer learning algorithms: A survey. Neurocomputing 2017, 267, 516–524. [Google Scholar] [CrossRef]
- Liu, W.; Lai, G.; Liu, A. Tremor Attenuation For Robot Teleoperation By A Broad Learning System-Based Approach. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 7627–7632. [Google Scholar] [CrossRef]
- Taylor, R.H.; Lavealle, S.; Burdea, G.C.; Mosges, R. Computer-Integrated Surgery: Technology and Clinical Applications, 1st ed.; MIT Press: Cambridge, MA, USA, 1995. [Google Scholar]
- Yang, C.; Wang, X.; Li, Z.; Li, Y.; Su, C.Y. Teleoperation Control Based on Combination of Wave Variable and Neural Networks. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2125–2136. [Google Scholar] [CrossRef] [Green Version]
- Al-Mouhamed, M.A.; Nazeeruddin, M.; Merah, N. Design and Instrumentation of Force Feedback in Telerobotics. IEEE Trans. Instrum. Meas. 2022, 58, 1949–1957. [Google Scholar] [CrossRef]
- Ju, Z.; Yang, C.; Li, Z.; Cheng, L.; Ma, H. Teleoperation of humanoid baxter robot using haptic feedback. In Proceedings of the 2014 International Conference on Multisensor Fusion and Information Integration for Intelligent Systems (MFI), Beijing, China, 28–29 September 2014; pp. 1–6. [Google Scholar]
- Kang, B.W.; Kang, S.G. The sliding mode controller with an additional proportional controller for fast tracking control of second order systems. In Proceedings of the 2012 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Seoul, Republic of Korea, 14–17 October 2012; pp. 2383–2388. [Google Scholar]
- Tokat, S.; Eksin, I.; Güzelkaya, M. New approaches for on-line tuning of the linear sliding surface slope in sliding mode controllers. Turk. J. Electr. Eng. Comput. Sci. 2003, 11, 45–54. [Google Scholar]
- Yang, Q.; Liang, K.; Su, T.; Geng, K.; Pan, M. Broad learning extreme learning machine for forecasting and eliminating tremors in teleoperation. Appl. Soft Comput. 2021, 112, 107863. [Google Scholar] [CrossRef]
- Chen, C.L.P.; Liu, Z.; Feng, S. Universal Approximation Capability of Broad Learning System and Its Structural Variations. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 1191–1204. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Liu, Z. Broad Learning System: An Effective and Efficient Incremental Learning System Without the Need for Deep Architecture. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 10–24. [Google Scholar] [CrossRef] [PubMed]
- Xu, Z.; Chang, X.; Xu, F.; Zhang, H. L-1/2 regularization: A thresholding representation theory and a fast solver. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23, 1013–1027. [Google Scholar] [PubMed]
- Yang, W.; Gao, Y.; Shi, Y.; Cao, L. Mrm-lasso: A sparse multiview feature selection method via low-rank analysis. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 2801–2815. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tibshirani, R. Regression Shrinkage and Selection via the Lasso. J. R. Stat. Soc. Ser. B 1996, 58, 267–288. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | Theta | d | a | Alpha | Offset |
|---|---|---|---|---|---|
| 1 | q1 | 105 | 0 | 0 | |
| 2 | q2 | 0 | −174 | 0 | |
| 3 | q3 | 0 | −174 | 0 | 0 |
| 4 | q4 | 76 | 0 | ||
| 5 | q5 | 80 | 0 | 0 | |
| 6 | q6 | 44 | 0 | 0 | 0 |
| Different Methods and Metrics | SSE | RMSE | Train Time | |
|---|---|---|---|---|
| Broad learning system filter | 0.0687 | 0.0026 | 80.06% | 0.118 |
| Incremental broad learning system filter | 0.0587 | 0.0024 | 82.94% | 0.122 |
| Support vector machine filter | 0.0918 | 0.0303 | 73.35% | 0.278 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, G.; Liu, W.; Yang, W.; Zhong, H.; He, Y.; Zhang, Y. An Incremental Broad-Learning-System-Based Approach for Tremor Attenuation for Robot Tele-Operation. Entropy 2023, 25, 999. https://doi.org/10.3390/e25070999
Lai G, Liu W, Yang W, Zhong H, He Y, Zhang Y. An Incremental Broad-Learning-System-Based Approach for Tremor Attenuation for Robot Tele-Operation. Entropy. 2023; 25(7):999. https://doi.org/10.3390/e25070999
Chicago/Turabian StyleLai, Guanyu, Weizhen Liu, Weijun Yang, Huihui Zhong, Yutao He, and Yun Zhang. 2023. "An Incremental Broad-Learning-System-Based Approach for Tremor Attenuation for Robot Tele-Operation" Entropy 25, no. 7: 999. https://doi.org/10.3390/e25070999
APA StyleLai, G., Liu, W., Yang, W., Zhong, H., He, Y., & Zhang, Y. (2023). An Incremental Broad-Learning-System-Based Approach for Tremor Attenuation for Robot Tele-Operation. Entropy, 25(7), 999. https://doi.org/10.3390/e25070999