Deflection of Cross-Ply Composite Laminates Induced by Piezoelectric Actuators

Abstract
:1. Introduction
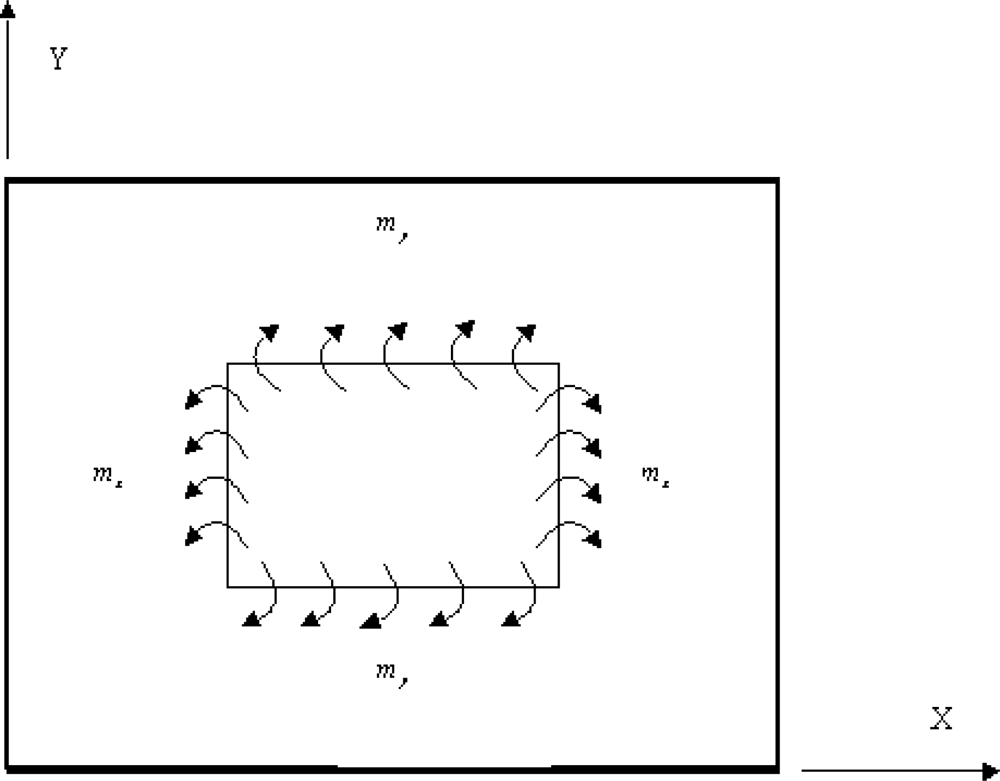
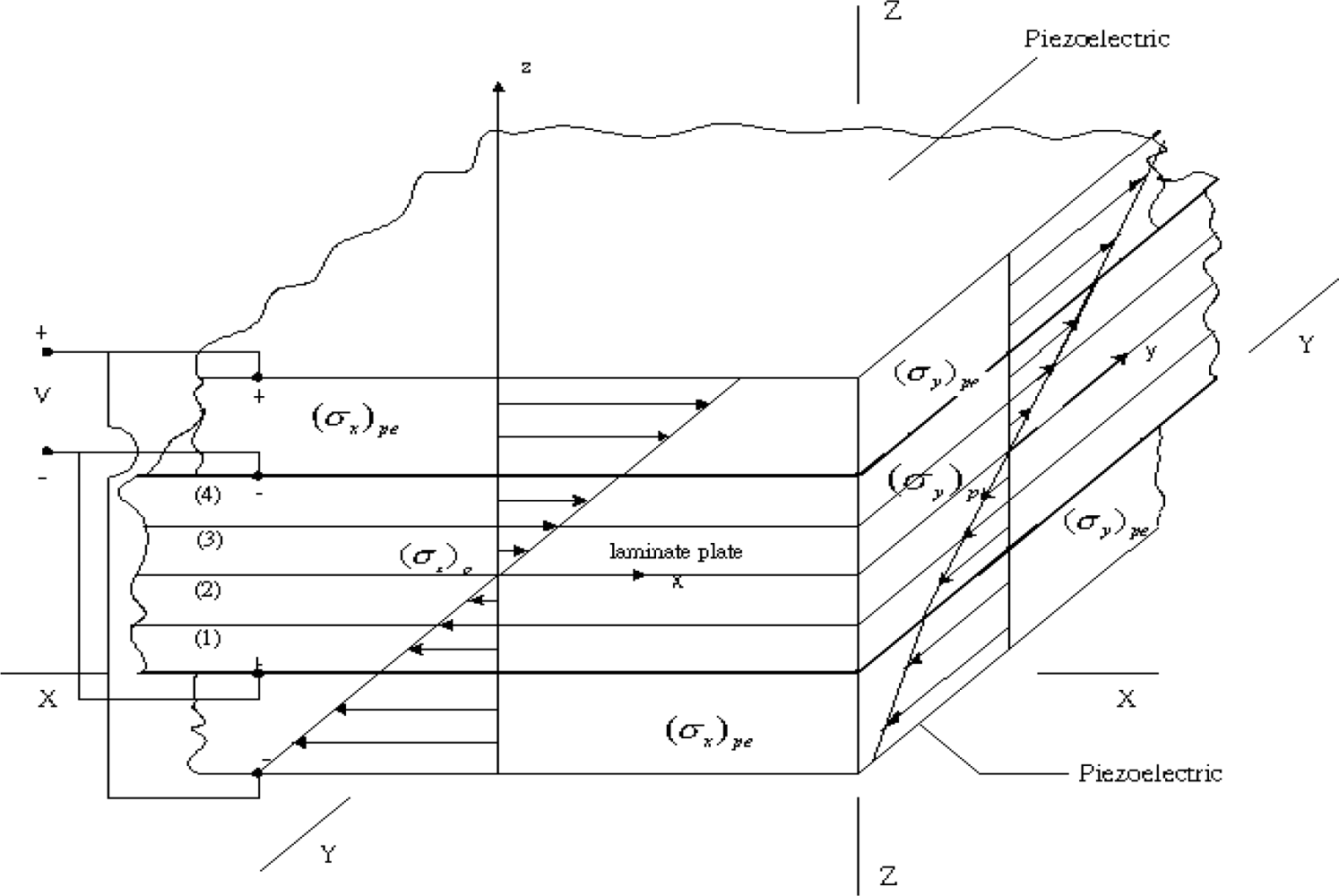
2. Bending Moment
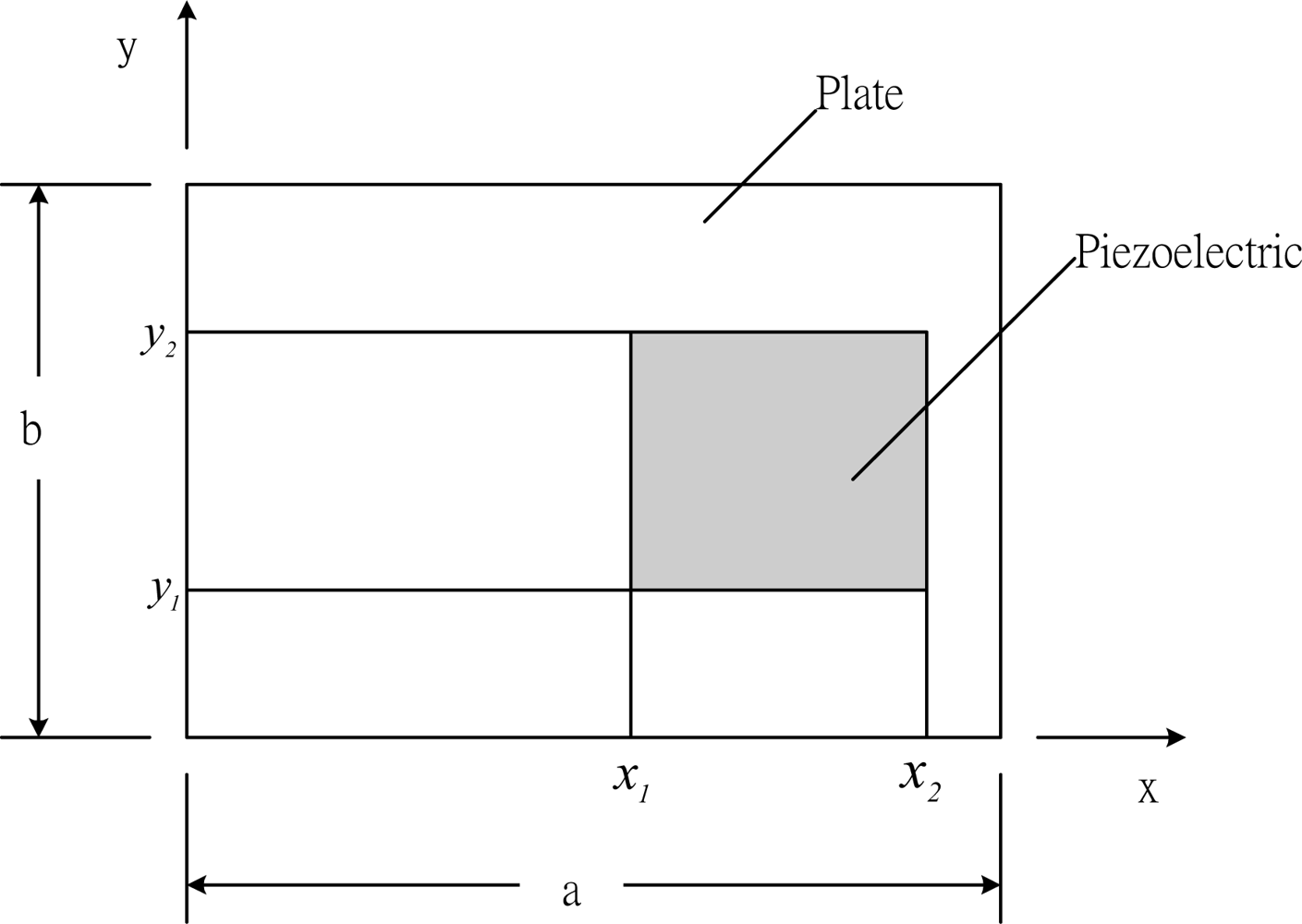
3. Deflection of a Simply Supported Composite Plate
4. Finite Element Analysis
5. Numerical Validation and Examples
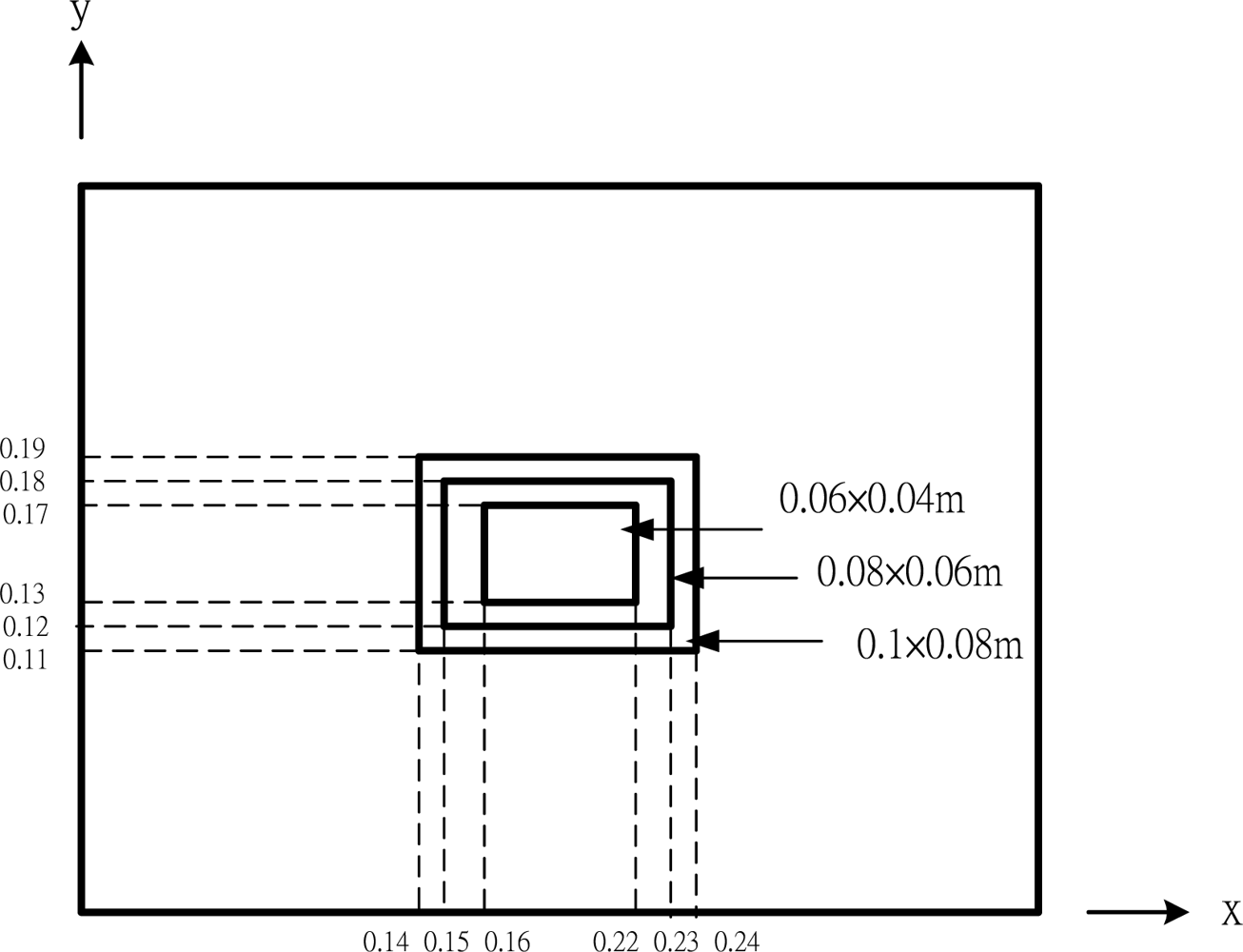
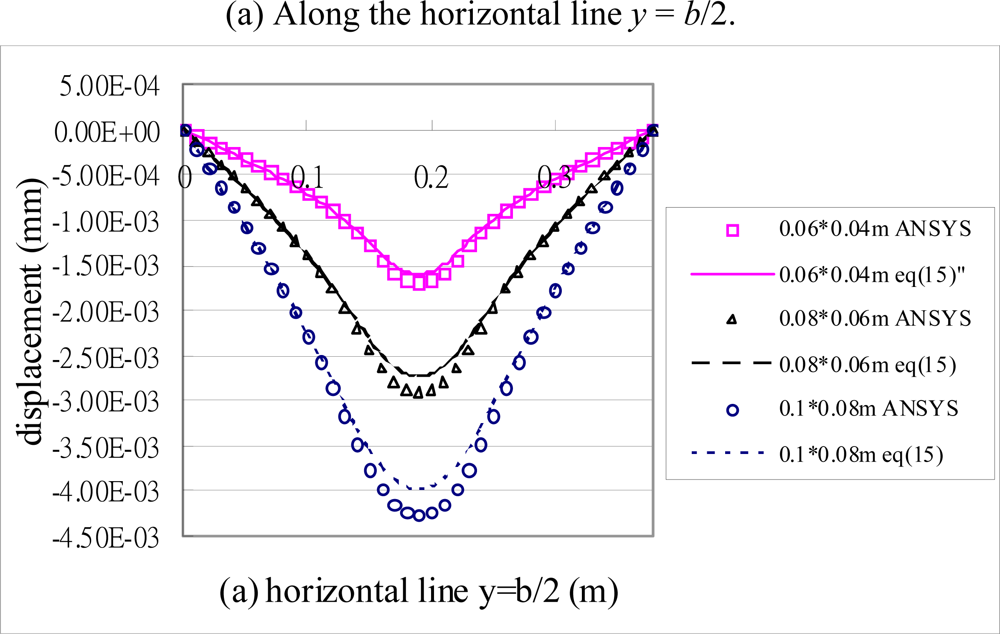
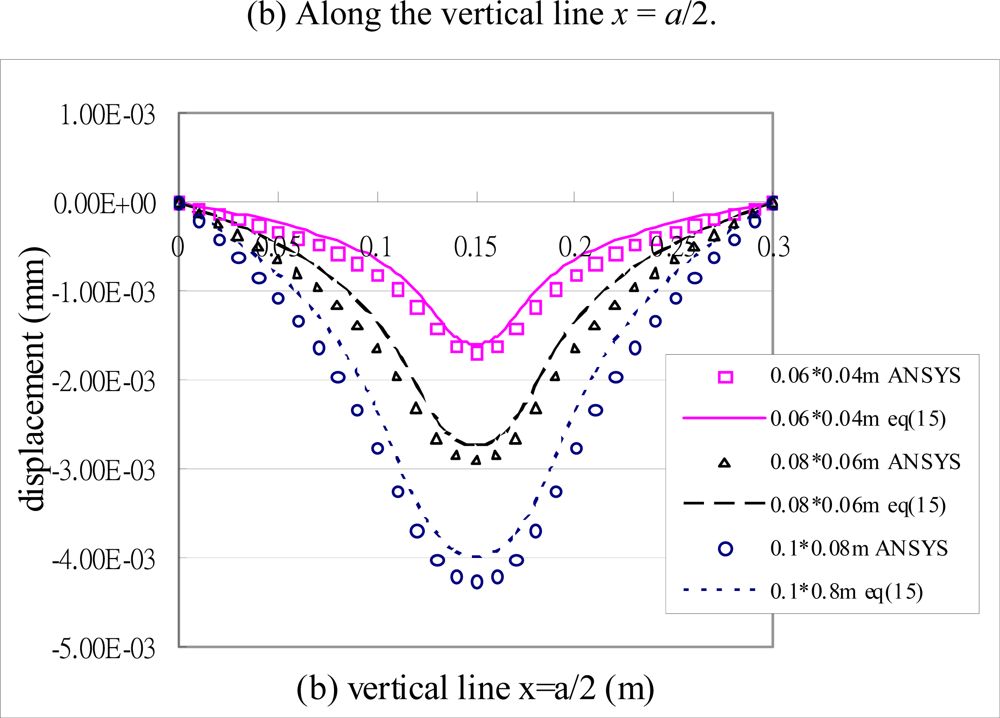
5.1. Example 1: Three different sizes of actuators
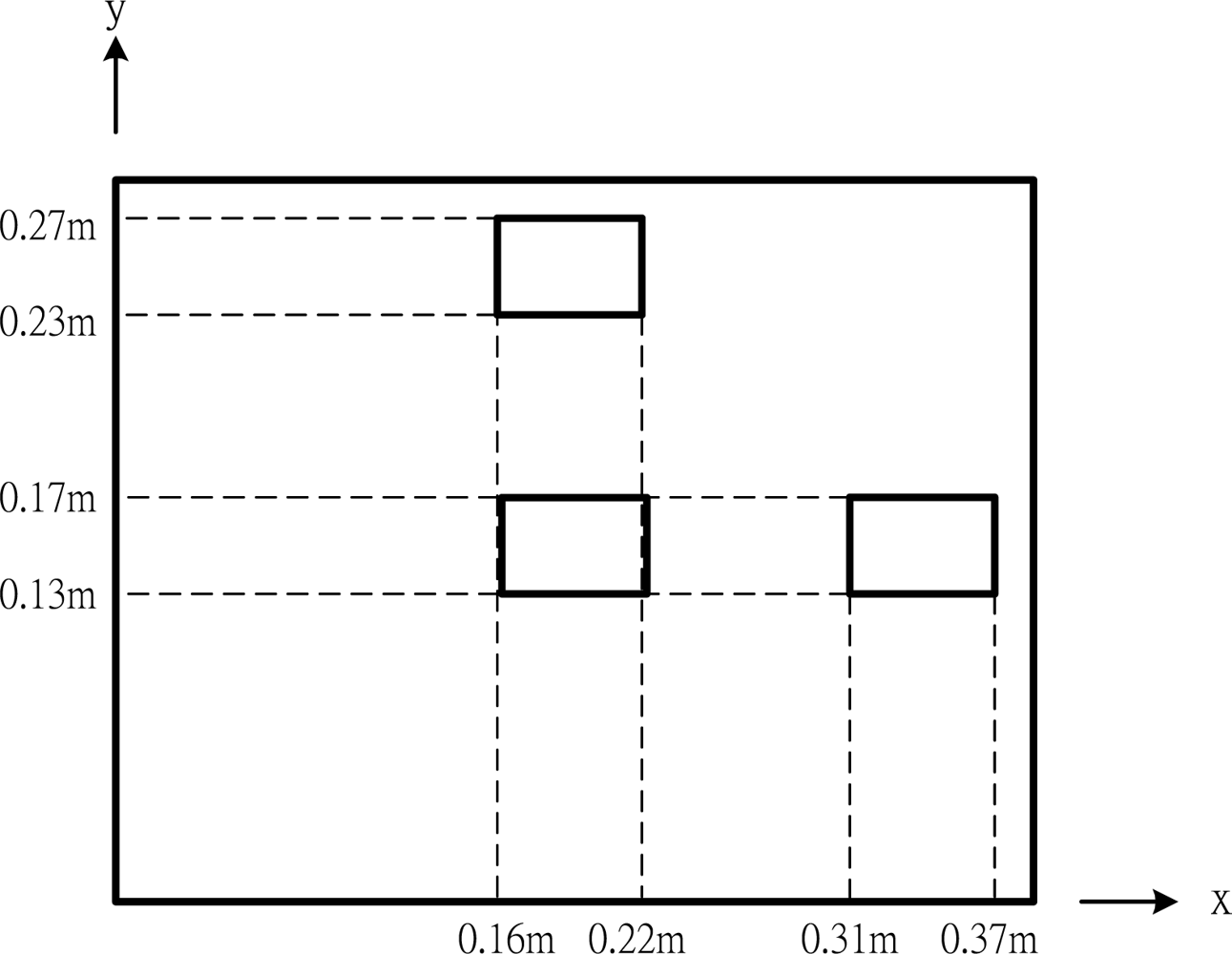
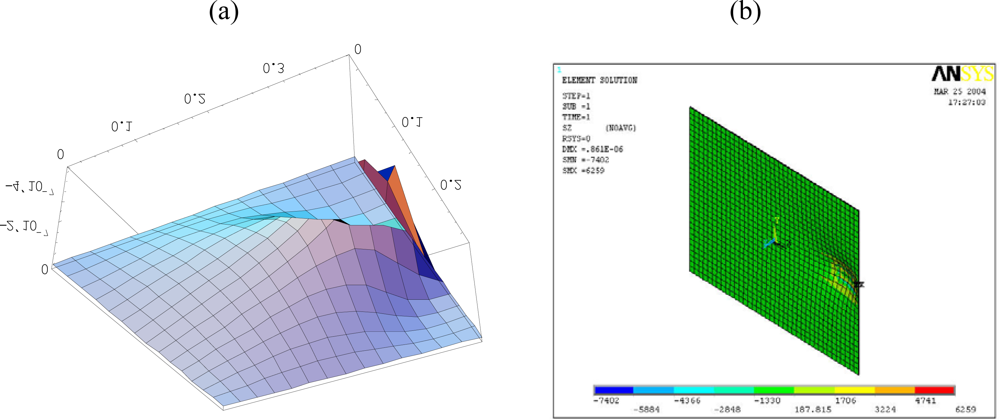
5.2. Example 2: Three different locations of actuators
6. Conclusions
References
- Saravanos, D.A.; Heyliger, P.R. Mechanics and computational models for laminated piezoelectric beams, plates and shells. Appl. Mech. Rev 1999, 52, 305–320. [Google Scholar]
- Bailey, T.; Hubbard, J.E. Distributed piezoelectric-polymer active vibration control of a cantilever beam. J. Guid. Contr. Dyn 1985, 8, 605–611. [Google Scholar]
- Crawley, E.; de Luis, J. Use of piezoelectric actuators as elements of intelligent structures. AIAA J 1987, 25, 1373–1385. [Google Scholar]
- Huang., G.H.; Sun, C.T. The dynamic behaviour of a piezoelectric actuator bonded to an anisotropic elastic medium. Int. J. Solids Struct 2006, 43, 1291–1307. [Google Scholar]
- Dimitriadis, E.K.; Fuller, C.R.; Rogers, C.A. Piezoelectric actuators for distributed vibration excitation of thin plates. J. Vibr. Acoust 1991, 113, 100–107. [Google Scholar]
- Koconis, D.B.; Kollar, L.P.; Springer, G.S. Shape control of composite plates and shells with embedded actuators I: voltage specified. J. Compos. Mater 1994, 28, 415–458. [Google Scholar]
- Luo, Q.; Tong, L. High precision shape control plates using orthotropic piezoelectric actuators. Finite Elem. Anal. Design 2006, 42, 1009–1020. [Google Scholar]
- Lin, J.C.; Nien, M.H. Adaptive modeling and shape control of laminated plates using piezoelectric actuators. J. Mater. Process. Technol 2007, 189, 231–236. [Google Scholar]
- Bowen, C.R.; Butler, R.; Jervis, R.; Kim, A.H.; Salo, A.I.T. Morphing and shape control using unsymmetrical composites. J. Intell. Mat. Syst. Struct 2007, 18, 89–98. [Google Scholar]
- Giddings, P.; Bowen, C.R.; Butler, R.; Kim, H.A. Characterisation of actuation properties of piezoelectric bi-stable carbon-fibre laminates. Composites 2008, 39, 697–703. [Google Scholar]
- Narayanan, S.; Balamurugan, V. Finite element modelling of piezolaminated smart structures for active vibration control with distributed sensors and actuators. J. Sound Vibr 2003, 262, 529–562. [Google Scholar]
- Zallo, A.; Gaudenzi, P. Finite element models for laminated shells with actuation capability. Comp. Struct 2003, 81, 1059–1069. [Google Scholar]
- Benjeddou, A. Advances in piezoelectric finite element modeling of adaptive structural elements: a survey. Comput. Struct 2000, 76, 347–363. [Google Scholar]
- Liu, P.; Rao, V.S.; Derriso, M. Active control of smart structures with optimal actuator and sensor locations. SPIE 2002, 4693, 1–12. [Google Scholar]
- Li, Y.; Onoda, J.; Minesugi, K. Simultaneous optimization of piezoelectric actuator placement and feedback for vibration suppression. IAA ACTA Astron. J 2002, 50, 335–341. [Google Scholar]
- Qiu, Z.; Zhang, X.; Wu, H.; Zhang, H. Optimal placement and active vibration control for piezoelectric smart flexible cantilever plate. J. Sound Vibr 2007, 301, 521–543. [Google Scholar]
- Patnaik, B.R.; Heppler, G.R.; Wilson, W.J. Sensor effectiveness coefficients for piezoelectric materials. Proceedings of the American Control Conferences, Seattle, Washington, DC, USA, June 30–July 5, 1996; pp. 3801–3802.
- Qing, G.; Qiu, J.; Liu, Y. A semi-analytical solution for static and dynamic analysis of plates with piezoelectric patches. Int. J. Solids Struct 2006, 43, 1388–1403. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Longitudinal modulus E1 | Transverse modulus E2 | Shear modulus G12 | Shear modulus G23 | Poisson’s ratio v12 | Poisson’s ratio v23 |
|---|---|---|---|---|---|
| 108 GPa | 10.3 GPa | 7.13 GPa | 4.02 GPa | 0.28 | 0.28 |
| Method | ANSYS | Equation (15) | Error (%) |
|---|---|---|---|
| Size | |||
| PZT 0.06 m × 0.04 m | 1.68 × 10−3 mm | 1.59 × 10−3 mm | 5.4 |
| PZT 0.08 m × 0.06 m | 2.90 × 10−3 mm | 2.73 × 10−3 mm | 6.3 |
| PZT 0.1 m × 0.08 m | 4.26 × 10−3 mm | 3.98 × 10−3 mm | 6.8 |
| Method | ANSYS | Equation (15) | Error (%) |
|---|---|---|---|
| Location | |||
| PZT at central region | 1.68 × 10−3 mm | 1.59 × 10−3 mm | 5.4 |
| PZT at right region | 8.62 × 10−4 mm | 8.00 × 10−4 mm | 7.7 |
| PZT at top region | 1.27 × 10−3 mm | 1.34 × 10−3 mm | 4.9 |
©2010 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/)
Share and Cite
Her, S.-C.; Lin, C.-S. Deflection of Cross-Ply Composite Laminates Induced by Piezoelectric Actuators. Sensors 2010, 10, 719-733. https://doi.org/10.3390/s100100719
Her S-C, Lin C-S. Deflection of Cross-Ply Composite Laminates Induced by Piezoelectric Actuators. Sensors. 2010; 10(1):719-733. https://doi.org/10.3390/s100100719
Chicago/Turabian StyleHer, Shiuh-Chuan, and Chi-Sheng Lin. 2010. "Deflection of Cross-Ply Composite Laminates Induced by Piezoelectric Actuators" Sensors 10, no. 1: 719-733. https://doi.org/10.3390/s100100719
APA StyleHer, S. -C., & Lin, C. -S. (2010). Deflection of Cross-Ply Composite Laminates Induced by Piezoelectric Actuators. Sensors, 10(1), 719-733. https://doi.org/10.3390/s100100719