1. Introduction
Since their inception, computer numerically controlled (CNC) machines have evolved to adapt to changing technological and industrial requirements. The predominant factor which drove the initial development of CNC machines was the need for increased productivity. The necessity of machining ever smaller components and to comply with the tougher standards that limit the number of defects in these components, requires CNC machines to not only increase their precision, speed and accuracy but also to maintain a high productivity. To cover these needs, new generation machines have to perform monitoring strategies to allow autonomous self-optimization that can be done through the integration of control-process strategies into the machine tool control architecture [
1]. These capabilities are achieved by incorporating multiple sensors [
2] for online measurement and processing that allow remote monitoring and intelligent maintenance for production maximization [
3]. The installation of these sensors should not affect the machining process [
4], therefore, the incorporation and use of a wireless sensor network is desirable.
In order to provide some of the desired features and functionalities, new generation CNC machines require the measurement of different variables that are useful for obtaining, in a direct or indirect form, the required information for diagnosing the machine’s operational condition and improving the machining process [
1]. The most common-measured variables on a CNC machine include, among others, vibration, current, force and acoustic emissions. Different methodologies have been proposed to obtain different parameters or features of the process, as well as the tool and the machine conditions in general. Some early works that use the previously mentioned variables in their methodologies are Albarbar,
et al. [
5], Wright,
et al. [
6], Malekian
et al. [
7], Rangel-Magdaleno,
et al. [
8], Vela-Martinez
et al. [
9] that use vibrations for monitoring the electromechanical condition on the CNC machine, Romero-Troncoso
et al. [
10], Franco-Gasca
et al. [
11], Li
et al. [
12] that use current for detecting the cutting force and the tool wear, Huang
et al. [
13], Ertnuc and Oysu [
14], Shao
et al. [
15] that use force measurements for monitoring the cutting force, Alonso and Salgado [
4], Salgado and Alonso [
16] use acoustic emissions for tool-wear monitoring. Likewise, there are other works related to the dynamic parameters, such as Morales-Velazquez
et al. [
17] and Petrella and Tursini [
18]. By utilizing the dynamic motion parameters, it is possible to optimize the piece machining, minimize the tool wear, and increase the precision of the positioning platforms for micro-machining applications [
7], where different techniques have been studied, such as those using interferometry, or those using position sensing detectors (PSD) in order to validate the resolution and compensate for errors [
19,
20]. Since in most of the applications the online processing of the variables is essential, the use of smart sensors is necessary [
21]. Smart sensors have been developed and used for several applications in different works, as in those of Wang and Jianu [
22], Rangel-Magdaleno,
et al. [
8], Petrella and Tursini [
18], Ramamurthy
et al. [
23] and Son
et al. [
24]. However, new generation CNC machines require the measurement of different variables at the same time; therefore, a wireless network is necessary for solving the necessity of incorporating multiple sensors with specific processing capabilities.
Some sensor networks based on different wireless technologies have been developed, as in the case of Salvadori
et al. [
25], who proposed a system that uses two hardware topologies responsible for signal acquisition, processing, and transmission; one is based on an intelligent sensor module, and the other is a module for remote data acquisition. Wireless communication is accomplished through a transceiver using Gaussian Frequency-Shift Keying (GFSK) modulation in the 2.4 GHz band with a transmission rate of 1 Mbps, but it uses a custom-made protocol. Son
et al. [
24] proposed a wireless smart sensor network using the WiFi protocol which is based on the IEEE 802.11b standard, in which the communication is done through a commercial module that is used as a wireless bridge for the transmission of sensor data. On the other hand, Ramamurthy
et al. [
23] present a generic platform using WiFi and Bluetooth wireless protocols; the smart sensor node is composed of three layers in order to make the system more flexible and portable, yet, the resulting size makes it impossible to use the system in applications where the sensor has to be mounted in a limited area. Although the necessity of measuring a large number of variables in CNC machines is latent, most of the developed works have the limitation of incorporating multiple sensors on the machines; others do not have online processing capacity. Some smart sensors that allow this capacity have been developed, but they focus on the processing of a single variable. Other works that propose wireless sensor networks meet the bandwidth requirements, but with high power consumption, and because of the protocol used, the number of nodes can be insufficient for some CNC machine applications.
The contribution of this work is the development of a wireless network platform of smart sensors for CNC machine applications based on the IEEE 802.15.4 standard to comply with the measurement requirements of new generation machines, which are low power consumption and high scalability to allow the incorporation of a large number of network nodes. The sensor node prototype has a small size and low cost, and it consists of two parts: the wireless protocol and hardware signal processing (HSP). Both parts require high processing capabilities, so an FPGA (Field Programmable Gate Array) implementation provides the characteristic of reconfigurability to the sensor node allowing it to be configured in order to carry out a specific task, or reconfigured on-demand to carry out other tasks. In the case of the proposed network, this capability is available for each smart sensor, allowing multiple-signal processing in parallel, and making it suitable for online applications. In this work, four different smart sensors are put under test in the network and their corresponding signal processing techniques are implemented in the FPGA sensor node: (1) accelerometer-based vibrations monitoring, (2) sensorless jerk monitoring using an adaptive antisymmetric high-order FIR (finite impulse response) filter, 3) FPGA-based fused smart-sensor for tool-wear area quantitative estimation in CNC machine inserts, and 4) PSD-based micropositioning measurement.
3. Wireless Smart Sensor Network
Figure 1 shows the general block diagram of the network, which can integrate
n wireless smart sensors (WSS) based on the proposed platform, the maximum value of
n is 65,535 for a single coordinator. The smart sensors are connected to different primary sensors that monitor the variables of interest from the CNC machine in a typical manufacturing cell. The master device or coordinator is implemented in a platform with similar characteristics, it is responsible for associating or disassociating the devices in its PAN, and it configures the processing and acquisition parameters. The network is capable of communicating directly with a computer, a display or a storage system.
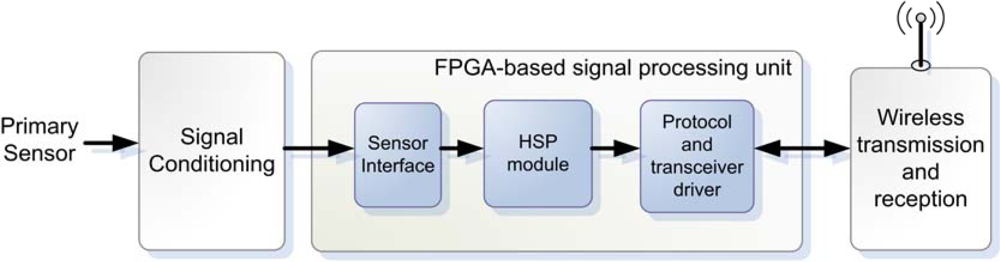
The implemented platform consists of three stages as shown in
Figure 2: signal conditioning, wireless transmission and reception, and hardware processing and control. The signal conditioning stage includes the instrumentation of the different type of sensors that are incorporated on the device; this stage is developed in an external module with a physical interface for coupling to the platform. This module is different for each type of sensor, and its construction is simple and compact. The wireless transmission and reception stage is constituted by a module that allows the modulation and transmission of data; this stage includes a commercial transceiver circuit, which uses the standard IEEE 802.15.4 in the physical and media access control (MAC) layer. Furthermore, it includes the physical environment for wireless transmission, composed of coupling circuitry for an external antenna.
The hardware processing unit is based on a low-cost and low-power consumption FPGA that controls the interface of the signal conditioning stage by implementing the driver for the analog-to-digital converter (ADC), which depends on the primary sensor connected to the platform. It connects to the transmission stage in order to control the radio transceiver for the wireless communication; it also handles the communication protocol according to the network capabilities and includes modules for hardware signal processing.
3.1. Wireless Protocol
In the hardware processing unit it is necessary to define a communication protocol for the wireless sensor network. Since the selected standard is capable of operating at three different radio frequency bands, the 2.4 GHz band is chosen because of its high transmission rate and because it operates in the industrial, scientific and medical (ISM) band.
The communication protocol uses a star topology network in which slave nodes can communicate only with the coordinator of the network [
28]; each node has a specific 16-bit PAN address, and at the same time a 16-bit and 64-bit individual addresses all stored in a memory into the device. The network coordinator integrates several tasks as: association and disassociation of nodes in the network, device configuration, data request and data reception, request of node status. Moreover, the nodes integrate specific tasks for the sensor network: association to only one coordinator, send data to request and receive setup instructions; that is why they are called reduced functionality devices (RFD) as they have basic functionalities in the protocol but they are not capable of coordinating a network of similar devices.
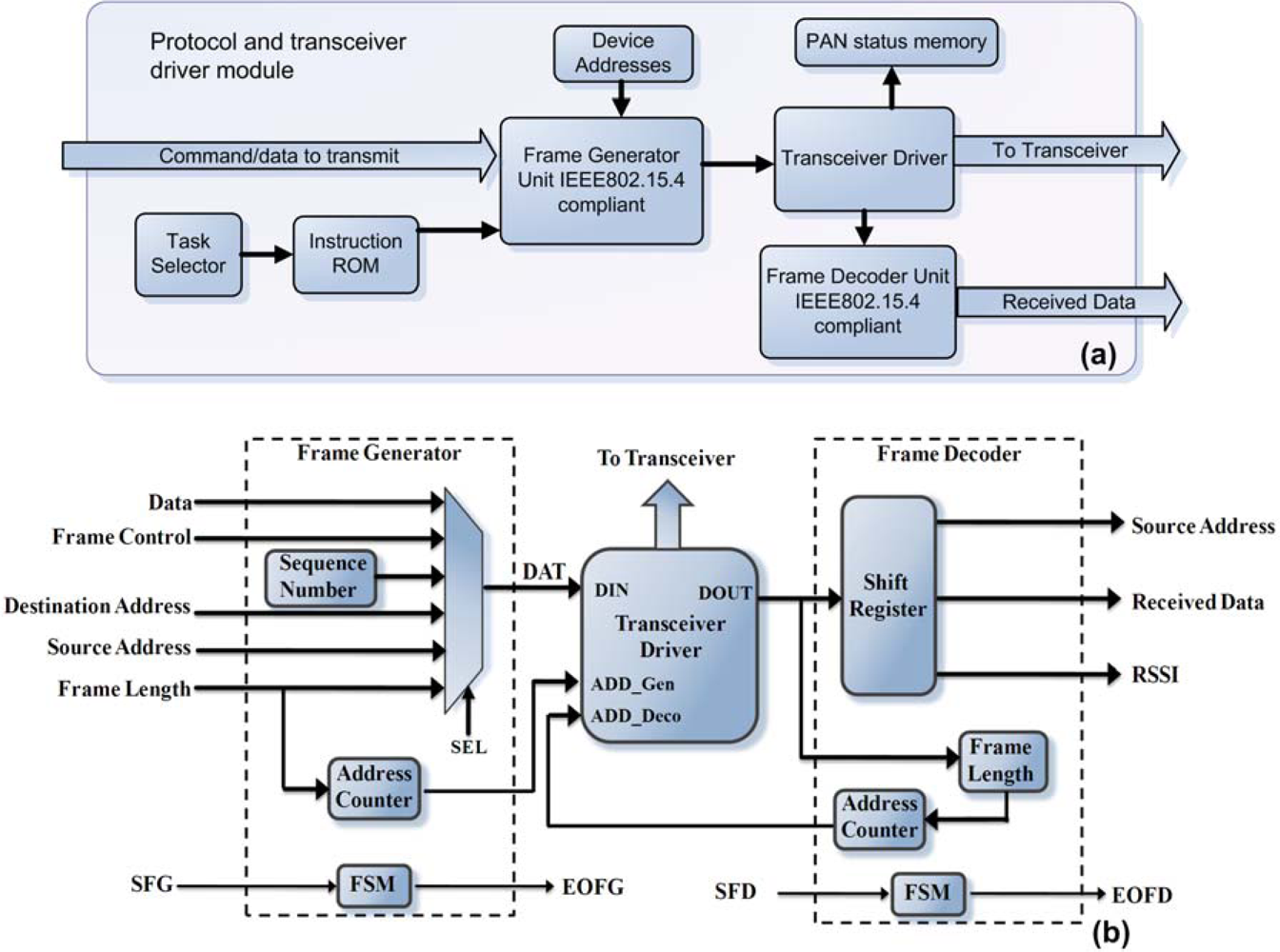
Figure 3a shows the implemented architecture to manage the wireless transmission stage; it consists of two parts: the first part is an interface to the transceiver circuit for physical configuration of the device; it configures the MAC-layer characteristics and manages the transmission and reception options. The second part includes the implementations of the proprietary protocol that is based on an instruction read-only memory (ROM) that stores the parameters for the physical initialization of the transceiver; a frame-generator module and a frame-decoder module are implemented in this part according to the frame format required by the standard.
Memory in the transceiver is implemented as static RAM and it is accessible via the SPI port. Memory is functionally divided into control registers and data buffers (FIFOs), to handle the reception and transmission of packets. The frame-generator unit is shown in
Figure 3b; it contains a field selector and an address counter to write through the transceiver driver the sequence of data in the transmission FIFO (TXFIFO) according to the frame format specified by the standard containing several fields; frame length, frame control, sequence number, PAN identifier and addressing fields and the data payload that contains the information from the HSP-modules. The first field is the frame length calculated depending of the number of data to be sent; the second field is the frame control defined by the standard and contains information of the frame structure. An 8-bit counter is used to generate the sequence number, this counter is incremented after the previous transmission is succeeded, and PAN identifier and addressing fields are located in a memory outside the module in order to be reconfigured. This module has an FSM (finite-state machine) to control the selector and the counters. The unit has a start frame generation (SFG) and end of frame generation (EFG) ports, in order to be externally controlled.
The frame-decoder unit, shown in
Figure 3b, is constituted by a shift register, a frame length counter, an address counter and an FSM, once the transceiver has received a valid packet without errors an interrupt occurred and the packet is read, the first byte read from the reception FIFO (RXFIFO) is the frame length and the data is stored in a register in order to read only the packet, after the frame length is stored the following data is read and stored in the shift register, the fields are organized according to their origin and importance, extracting only the source address and the data payload. Each packet has information of the signal received; the received signal strength indicator (RSSI) can be extracted from the packet too. Also this module has a start frame decoder SFD port and end of frame decoder EOFD port to control the module externally.
A memory bank is defined with the structure of the instruction ROM that defines the tasks of this protocol. Within the instruction ROM, there is a section that contains the initialization parameters of the different devices, defines the type of network, the frame format, the transmission power, and the communication channel. The coordinator module keeps all its addresses fixed, while the node addresses are defined by the coordinator.
3.2. Reconfigurable Processor
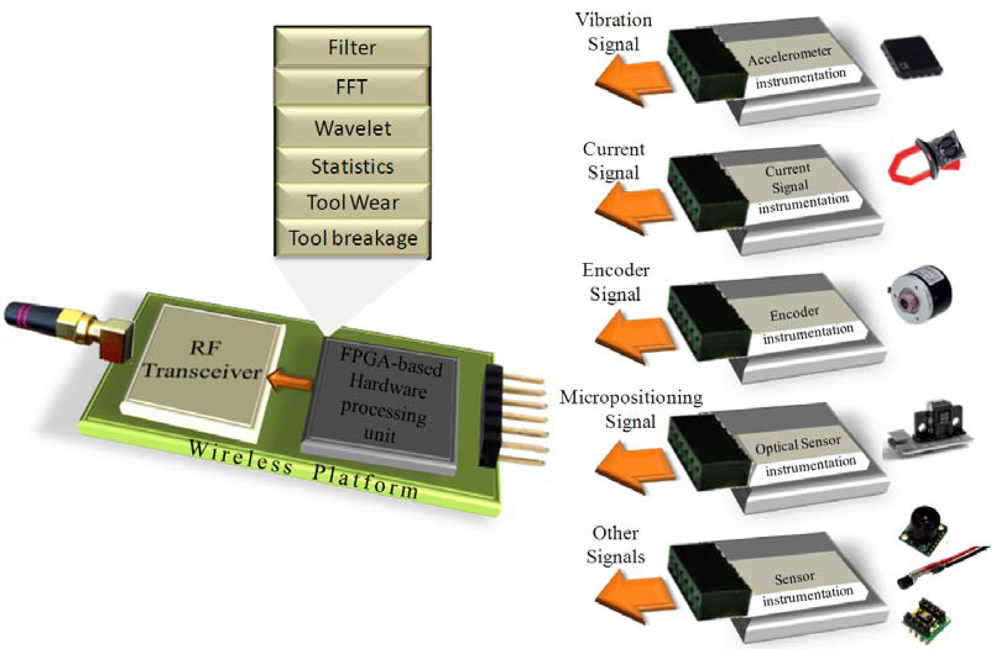
The main feature of the platform lies upon its capacity of incorporating different HSP modules; these modules can be implemented in the hardware processing stage due to its reconfigurability.
Figure 4 shows a block diagram of the proposed platform overall structure that depicts the FPGA-based processing stage where the description of an interface is implemented; this interface depends on the specific sensor connected to the platform, and on the drivers for the wireless module.
Figure 4 also shows the wireless transmission stage that consists of a radio frequency transceiver and the corresponding coupling circuitry. According to the application, different signal conditioning systems can be connected to the wireless platform depending on the sensors required for such an application.
3.2.1. Vibration Monitoring HSP Core
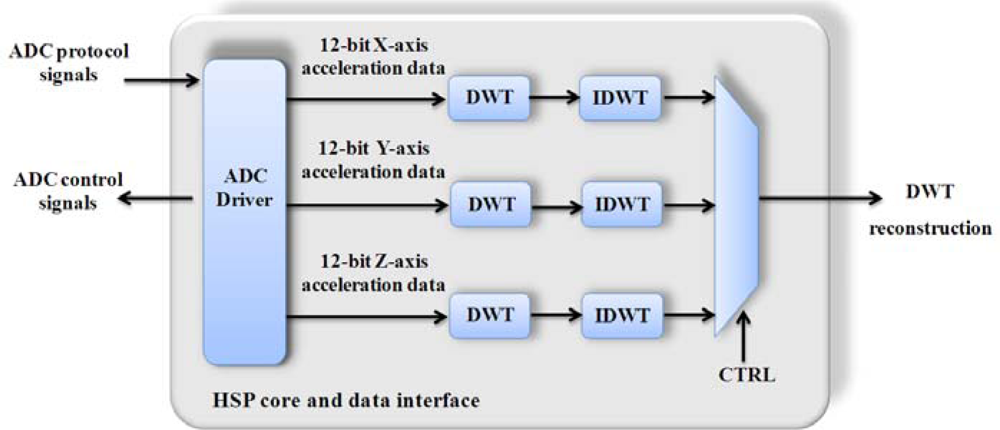
For broken-bar detection in spindle induction motors of CNC machines, the implementation shown in
Figure 5 is used. According to the methodology proposed by Rangel-Magdaleno
et al. [
29], a module that manages the ADC converter, and the modules of the wavelet transform for the decomposition (DWT) and the reconstruction (IDWT) of the selected level of analysis, were included. Once the reconstruction for each axis is obtained during the startup transient, the axis that will be sent through the wireless platform is selected.
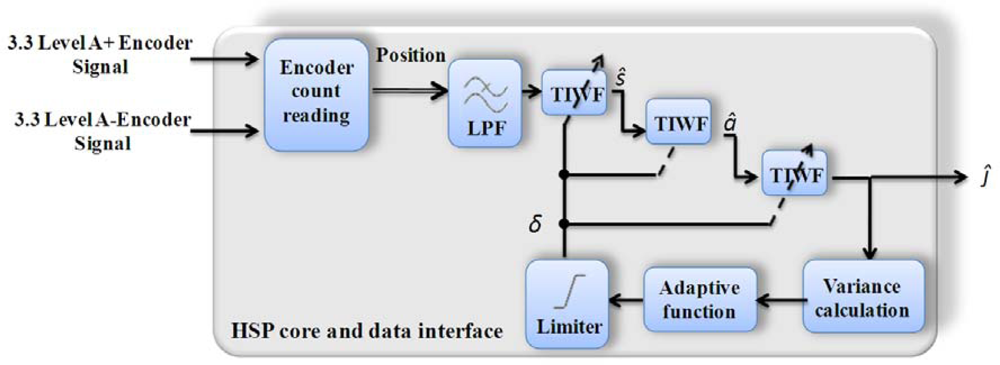
3.2.2. Jerk Monitoring HSP Core
Figure 6 shows the block diagram of the implemented methodology for jerk monitoring proposed by Morales-Velazquez
et al. [
17]. The implemented algorithm includes modules to acquire the position signal from an encoder, a low-pass filter (LPF) and TIWF filters to estimate velocity (
ŝ), acceleration (
â) and jerk (
ĵ), a module for variance calculation, and a module for obtaining the adaptability parameter (
δ).
3.2.4. PSD-Based Micropositioning Measurement HSP Core
Figure 8 shows the block diagram for micropositioning measurement based on a PSD sensor. The implementation consists of a driver for the ADC, a module for the LED pulse emission control (PLS) and an RMS computation unit for obtain the voltage measurement proportional to the distance.
3.3. Instrumentation
For measuring the corresponding variables according to the application, signal conditioning from the primary sensors is necessary; these signals are adapted to the wireless platform through a board-to-board connector. This section presents the signal conditioning implementation for each sensor used in the corresponding methodology.
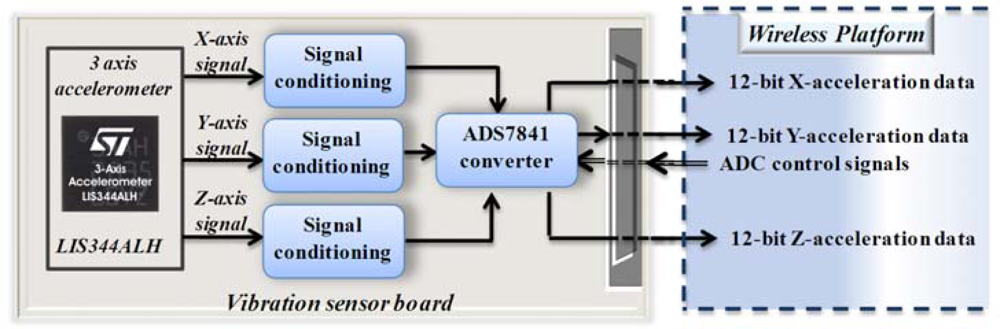
3.3.1. Acceleration Sensor Board
Figure 9 shows the block diagram of the instrumentation system utilized for measuring vibrations. This system consists of a triaxial accelerometer LIS344ALH from STMicroelectronics [
31], which has a bandwidth of 1,500 Hz for all axes, a user-selectable full scale of ±2 g/±6 g (
g = 9.81 m/s
2), a 0.66 V/g sensitivity and a 5 × 10
−4 resolution over a 100 Hz bandwidth. The system also contains a 12-bit resolution at the 4-channel ADC from Texas Instruments ADS7841 [
32], with a maximum sampling rate of 200 KHz for the four channels, the unused channel is left unconnected for this application. The control signals and output of the ADC are connected to the interface with the wireless platform.
3.3.2. Current Sensor Board
Figure 10 shows a block diagram of the instrumentation system for the feed motor current measurement that is obtained from a typical Copley Controls Corp servoamplifier model 413 with a 5 V/A sensitivity. The resolution of the system is 12-bit given by a 4-channel ADC ADS7841, also a instrumentation for signal conditioning of the motor current is required. This system can measure simultaneously up to four current signals; for this case study, only one channel is used, leaving the others connected to ground.
3.3.3. Encoder Sensor Board
Figure 11 shows the block diagram of the instrumentation system for an encoder with a resolution of 6,000 counts per revolution that is coupled to the servomotor on one axis of a CNC machine. For conditioning the encoder signals, a LJ245A driver is used in order to make the voltages levels from the encoder compatible with the platform.
3.3.4. Position Sensor Board
The block diagram for micro-displacement measurement is shown in
Figure 12; the instrumentation system is made for an optical sensor Z4D_B01 based on a PSD with a resolution of 10 μm and a 1.4 mv/μm sensitivity. The system contains a 12-bit resolution, 4-channel ADC ADS7841 to convert the voltage signal from the sensor. The instrumentation only uses one channel and the others are disabled as recommended by the manufacturer. A control signal is sent from the wireless platform to control the emission pulse of the infrared LED in the sensor.
4. Experimental Section
In this section the experimental validation of the sensor network applied to a manufacturing cell is presented. The experimentation includes three CNC machines. Four methodologies are implemented in four identical wireless platforms. The test consists on monitoring the smart wireless sensor during the operation of the CNC machines simultaneously.
The experimental setup consists on assembling four wireless smart sensors on three CNC machines within a manufacturing cell. Each smart sensor uses an AGLN250ZV2 low cost and low power consumption FPGA as processing unit. They operate at 20 MHz and have a radio frequency commercial transceiver MRF24J40 that is compatible with the IEEE 802.15.4 standard.
Figure 13 shows one of the four developed wireless smart sensor nodes with its corresponding enclosure for mounting and also shows the smart sensor placements in the manufacturing cell, the network coordinator is located in an equidistant space from the nodes and it is implemented in a commercial FPGA platform Spartan-3 XC3S200 that is connected to a PC, which uses the transceiver module MRF 24J40 too.
In a CNC machine center, a WSS is mounted on the spindle of the principal motor of a DYNA-4M CNC system to measure and analyze vibrations, and to detect broken bars in the induction motor as shown in
Figure 13a. Two conditions are set in the induction motor: the first one is for a healthy motor and the second one is for a motor with two broken bars. The acquisition is performed at a rate of 1,500 samples per second. In a machining process of a conic piece, the quantitative estimation of the tool wear area is obtained for three CNMG433MA inserts with different flank-wear area.
Figure 13b shows the mounting of a WSS on a FANUC Oi Mate-TC lathe; the feed rate is 0.333 mm/rev, the cutting depth is 1.5 mm and the cutting speed is 72 m/min. During the same machining process, the encoder position is measured on the X-axis to estimate the jerk at 1,000 samples per second, the WSS mounting is shown in
Figure 13c. On the other hand, for micropositioning measurement, a movement profile in micrometers is defined for a precision stage coupled to an EZG705-0-101 servomotor; the mounting of the WSS for this case is shown in
Figure 13d.
Table 2 shows the FPGA resource utilization for the synthesis of each smart sensor corresponding to each of the methodologies implemented.
Table 3 shows the FPGA resource utilization for the synthesis of the coordinator module. This resource utilization is the same independently of the nodes integrated in the network, the maximum power consumption of coordinator is 68.99 mW.
5. Results and Discussion
In this section the results of the techniques used in each smart sensor are presented, the information obtained simultaneously in the wireless sensor network is stored on the coordinator RAM and then, it is transferred to a PC, finally, using Matlab, the results are plotted.
5.1. Vibration Results
In this experiment, the motor of the spindle with two broken bars was used in order to test the performance of the network; a latter test was carried out for a healthy motor under the same network conditions.
Figure 14a and
Figure 14c show the time-domain vibration signal from the healthy motor and a motor with two broken bars respectively; the DWT analysis at a level-5 decomposition and reconstruction for a healthy motor is shown in
Figure 14b and for a motor with two broken bars is shown in
Figure 14d. Both signals are transmitted in this test for comparison.
5.2. Current Results
The results from the current technique are shown in
Table 4. The flank-wear area is estimated in each machining process. The quantitative value of the area is transmitted from the WSS in a 2.22 fixed point format after the machining process.
Figure 15 shows the cutting tool micrograph and the estimation data based on the polynomial function of
Equation (7) for the quantitative flank-wear area for selected inserts
5.3. Encoder Results
Figure 16 shows the results obtained from the encoder reading on the lathe during the machining process.
Figure 16a shows the position sent by the WSS in order to obtain analytically the jerk as shown in
Figure 16b, and the comparison against the WSS estimation shown in
Figure 16c.
5.4. PSD Results
The voltage measurement proportional to distance delivered by the sensor is sent through a WSS to a PC; the distance is obtained graphically in the order of micrometers; then, it is compared to the sent position as shown in
Figure 17a. Finally, the error is calculated and shown in
Figure 17b.
5.5. Speed and Range Network Results
Figure 18a shows the signal strength variation of a node for various distances;
Figure 18b shows the signal strength for the vibration WSS during the test.
Table 5 summarizes the network utilization for each smart sensor; the bits per second that are read directly from the sensors, and the amount of information after signal processing, which was 42,365 bps.
5.5. Network Capabilities
To determine the maximum number of WSS that can be integrated in the network, it is necessary to determine the maximum smart-sensor data rate that can be sent through the channel, which depends on the HSP-core implemented in the nodes and the maximum data rate that the coordinator can receive. The coordinator can read a complete frame with the maximum data payload in 263.64 μs; however, the standard specifies a maximum data rate of 250 kbps. If the network integrates nodes with low data rates, the number of nodes increase, for example a network with nodes transmitting at 1 byte per second with the minimum frame format, the netwok can integrate up to 2,604 nodes, but if the node transmit information at 232,283 bps all the bandwith is used and only one node can be integrated in this network with good conditions of reception.
5.6. Discussion
Experimental results using the proposed wireless smart sensor network validate the four methodologies implemented for CNC machines. The first methodology based on accelerometer measurement uses a smart sensor for detecting broken bars in spindle induction motors by using a DWT transform. The second methodology measures the servomotor driver current and the processing implemented on the smart sensor to estimate the flank-wear area in inserts during machining. For the third methodology, the validation was done by using a smart sensor for the measurement of the encoder signal from an axis servomotor of a CNC machine. The measure of position for a linear stage was obtained by processing in a smart sensor the voltage signal obtained from an optical sensor, calculating RMS value. For this experiment the PAN coordinator was placed at 5 m from the sensor nodes, allowing an optimum data reception and a bandwith network utilization of 22.53% of the total available of an IEEE 802.15.4 channel. During the test, additional data was transmitted in order to show the results validation, as in the case of accelerometer-based vibrations monitoring and encoder-based jerk monitoring methodologies; the omission of this additional information reduces the traffic in the network. The amount of data sent through is considerably reduced from 660,960 bps to 42,365 bps, 6.4% of the total raw data read. The applied processing allows the relevant information to be sent through the network for each particular application; it is also clear that the raw-data rate is over the maximum transfer rate in the specifications of the used standard [
28]. By using HSP modules in the WSS, the transmission time of the smart-sensor data after processing is significantly reduced in comparison with the raw data from the sensors; in this way, decreasing the traffic through the communication channel reduces the overall processing time, and increases the number of WSS that can be handled simultaneously in the network.


 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}