Assessment of Relative Accuracy of AHN-2 Laser Scanning Data Using Planar Features

Abstract
:
1. Introduction
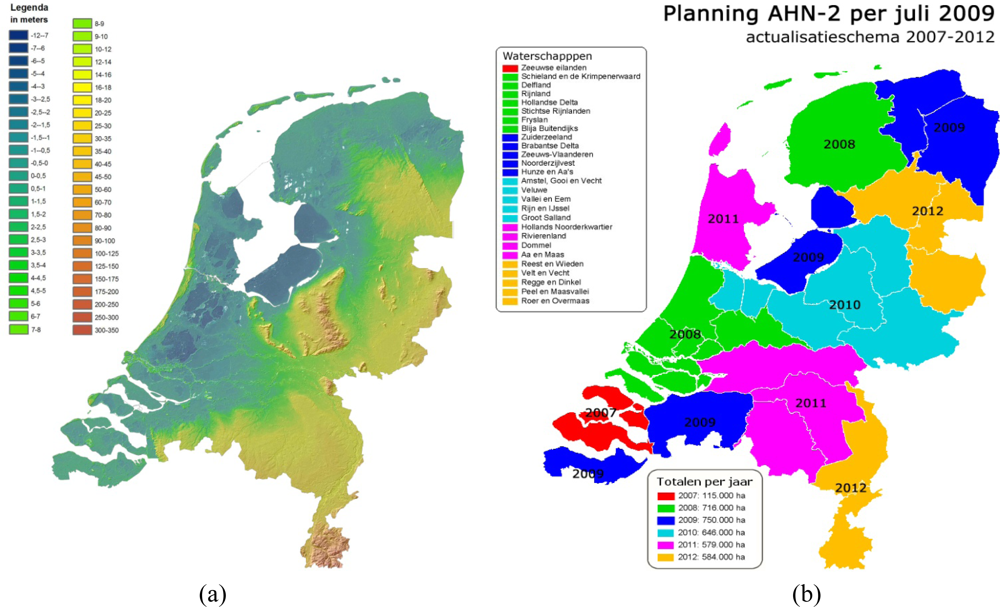
2. Airborne Laser Altimetry over the Netherlands: The AHN-2 Project
3. Strip Adjustment Using Planar Features
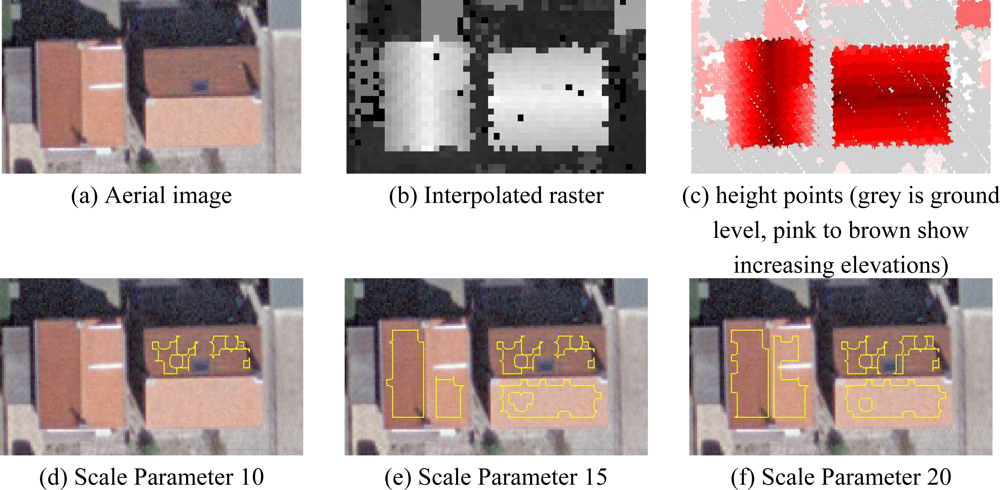
3.1. Extraction of Planar Features from Aerial Laser Data
3.2. Robust Plane Fitting Using RANSAC
3.3. Estimation of Strip Adjustment Parameters
4. Results of Accuracy Assessment of AHN-2 Data
4.1. Description of Dataset
4.2. Evaluation of Segmentation
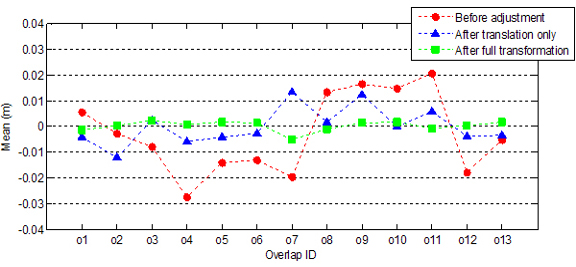
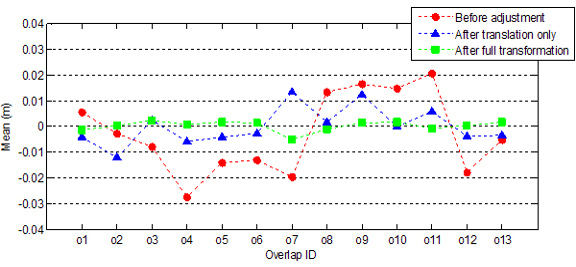
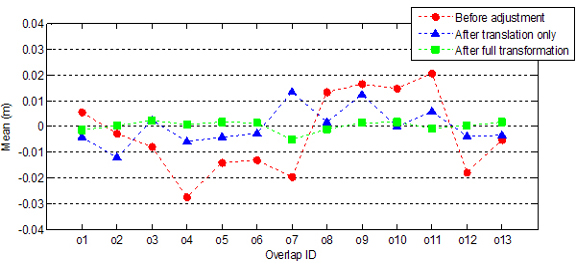
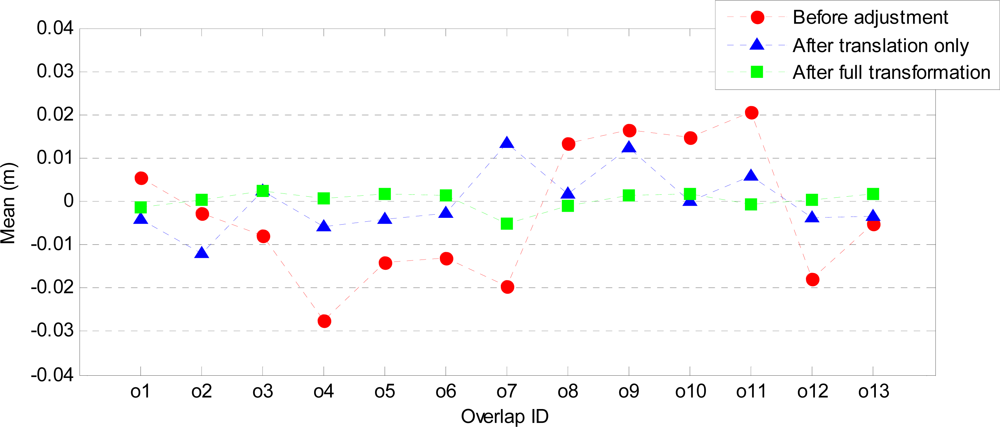
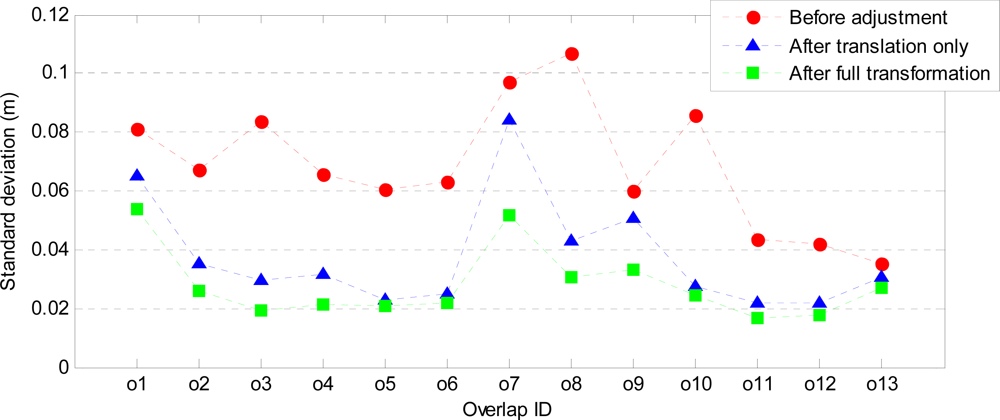
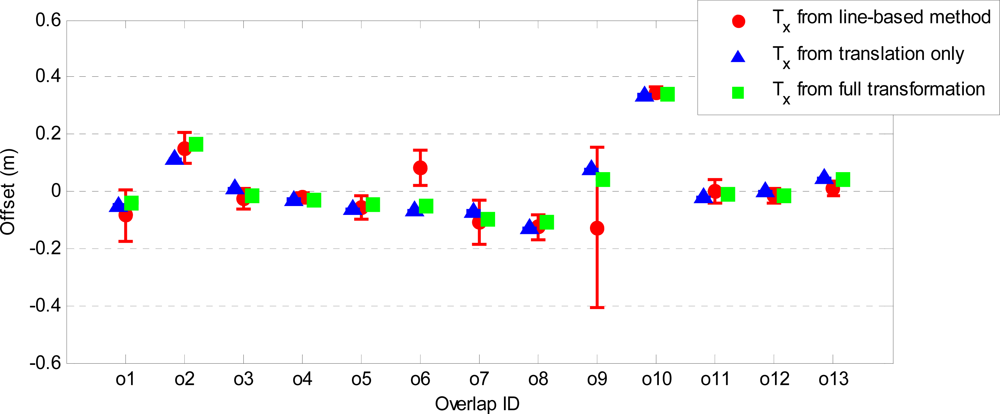
4.3. Accuracy Assessment Results
5. Conclusions
Acknowledgments
References
- Wouters, W; Bollweg, A. A Detailed Elevation Model Using Airborne Laser Altimetry. Geodetic Info Mag 1998, 9, 6–9. [Google Scholar]
- Actualisatie van het AHN; Waterschapshuis: Utrecht, The Netherlands. Available online: http://www.ahn.nl/actualisatie_van_het (accessed on 23 June 2010).
- Huising, EJ; Gomes Pereira, LM. Errors and Accuracy Estimates of Laser Data Acquired by Various Laser Scanning Systems for Topographic Applications. ISPRS J. Photogramm 1998, 53, 245–261. [Google Scholar]
- Schenk, T. Modeling and Analyzing Systematic Errors in Airborne Laser Scanners; Technical Notes in Photogrammetry No 19; The Ohio State University: Columbus, OH, USA, 2001. [Google Scholar]
- Baltsavias, E. Airborne Laser Scanning: Basic Relations and Formulas. ISPRS J. Photogramm 1999, 54, 199–214. [Google Scholar]
- Kilian, J; Haala, N; Englich, M. Capture and Evaluation of Airborne Laser Scanner Data. Proceedings of International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vienna, Austria, 12–18 July 1996; pp. 383–388.
- Hodgson, ME; Bresnahan, P. Accuracy of Airborne Lidar-Derived Elevation: Empirical Assessment and Error Budget. Photogramm. Eng. Remote Sensing 2004, 70, 331–339. [Google Scholar]
- Triglav-Cekada, M; Crosilla, F; Kosmatin-Fras, M. A Simplified Analytical Model for A-Priori Lidar Point-Positioning Error Estimation and a Review of Lidar Error Sources. Photogramm. Eng. Remote Sensing 2009, 75, 1425–1439. [Google Scholar]
- Habib, A; Bang, K; Kersting, A; Lee, D-C. Error Budget of Lidar Systems and Quality Control of the Derived Data. Photogramm. Eng. Remote Sensing 2009, 75, 1093–1108. [Google Scholar]
- Crombaghs, MJE; Brugelmann, R; de Min, EJ. On the Adjustment of Overlapping Strips of Laser Altimeter Height Data. Proceedings of International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Amsterdam, The Netherlands, 16–22 July 2000; pp. 230–237.
- Csanyi, N; Toth, CK. Improvement of Lidar Data Accuracy Using Lidar-Specific Ground Targets. Photogramm. Eng. Remote Sensing 2007, 73, 385–396. [Google Scholar]
- Bretar, F; Pierrot-Deseilligny, M; Roux, M. Solving the Strip Adjustment Problem of 3D Airborne Lidar Data. Proceedings of International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004; pp. 4734–4737.
- Vosselman, G. Analysis of Planimetric Accuracy of Airborne Laser Scanning Surveys. Proceedings of International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Beijing, China, 3–11 July 2008; pp. 99–104.
- Vosselman, G. On the Estimation of Planimetric Offsets in Laser Altimetry Data. Proceedings of International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Graz, Austria, 9–13 September 2002; pp. 375–380.
- Lee, J; Yu, KJ; Kim, Y; Habib, AF. Adjustment of Discrepancies between LIDAR Data Strips Using Linear Features. IEEE Geosci. Remote Sens. Lett 2007, 4, 475–479. [Google Scholar]
- Habib, AF; Kersting, AP; Ruifang, Z; Al Durgham, M; Kim, C; Lee, DC. LIDAR Strip Adjustment Using Conjugate Linear Features in Overlapping Strips. Proceedings of International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Beijing, China, 3–11 July 2008; pp. 385–390.
- Rentsch, M; Krzystek, P. LiDAR Strip Adjustment using Automatically Reconstructed Roof Shapes. Proceedings of International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Hannover, Germany, 2–5 June 2009; pp. 158–164.
- Ressl, C; Mandlburgera, G; Pfeifer, N. Investigating Adjustment of Airborne Laser Scanning Strips without Usage of GNSS/IMU Trajectory Data. Proceedings of ISPRS Workshop, “Laser scanning 2009”, Paris, France, 1–2 September 2009; pp. 195–200.
- Latypov, D. Estimating Relative Lidar Accuracy Information from Overlapping Flight Lines. ISPRS J. Photogramm. Remote Sensing 2002, 56, 236–245. [Google Scholar]
- Pfeifer, N; Oude Elberink, S; Filin, S. Automatic Tie Elements Detection for Laser Scanner Strip Adjustment. Proceedings of International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Enschede, the Netherlands, 12–14 September 2005.
- Filin, S. Recovery of Systematic Biases in Laser Altimetry Data Using Natural Surfaces. Photogramm. Eng. Remote Sensing 2003, 69, 1235–1242. [Google Scholar]
- Kager, H. Discrepancies between Overlapping Laser Scanner Strips-Simultaneous Fitting of Aerial Laser Scanner Strips. Proceedings of International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Istanbul, Turkey, 12–23 July 2004; pp. 555–560.
- Maas, HG. Methods for Measuring Height and Planimetry Discrepancies in Airborne Laserscanner Data. Photogramm. Eng. Remote Sensing 2002, 68, 933–940. [Google Scholar]
- Habib, A; Kersting, AP; Bang, KI; Lee, DC. Alternative Methodologies for the Internal Quality Control of Parallel LiDAR Strips. IEEE Trans. Geosci. Remote Sens 2010, 48, 221–236. [Google Scholar]
- Inwinning AHN-2 met nieuw FLI-MAP 400-systeem. Fugro Info juni 2008; Fugro Nederland: Amsterdam, the Netherlands, 2008. [Google Scholar]
- Roth, RB; Thompson, J. Practical Application of Multiple Pulse in Air (MPIA) Lidar in Large-Area Surveys. Proceedings of International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Beijing, China, 3–11 July 2008; pp. 183–188.
- Khoshelham, K; Li, ZL; King, B. A Split-and-Merge Technique for Automated Reconstruction of Roof Planes. Photogramm. Eng. Remote Sensing 2005, 71, 855–862. [Google Scholar]
- Khoshelham, K; Nardinocchi, C; Frontoni, E; Mancini, A; Zingaretti, P. Performance Evaluation of Automated Approaches to Building Detection in multi-Source Aerial Data. ISPRS J. Photogramm. Remote Sensing 2010, 65, 123–133. [Google Scholar]
- Nardinocchi, C; Forlani, G. Building Detection and Roof Extraction in Laser Scanning Data. In Automatic Extraction of Man-Made Objects from Aerial and Space Images; Gruen, A, Baltsavias, EP, van Gool, L, Eds.; Balkema: Lisse, The Netherlands, 2001; pp. 319–330. [Google Scholar]
- Rottensteiner, F; Trinder, J; Clode, S; Kubik, K. Building Detection by Fusion of Airborne Laser Scanner Data and multi-Spectral Images: Performance Evaluation and Sensitivity Analysis. ISPRS J. Photogramm. Remote Sensing 2007, 62, 135–149. [Google Scholar]
- Vosselman, G; Gorte, BG; Sithole, G; Rabbani Shah, T. Recognising Structure in Laser Scanner Point Cloud. Proceedings of International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Freiburg, Germany, 3–6 October 2004; pp. 33–38.
- Weidner, U; Forstner, W. Towards Automatic Building Extraction from High Resolution Digital Elevation Models. ISPRS J. Photogramm. Remote Sensing 1995, 50, 38–49. [Google Scholar]
- Weber, D; Englund, E. Evaluation and Comparison of Spatial Interpolators II. Math. Geol 1994, 26, 589–603. [Google Scholar]
- Baatz, M; Schape, A. Multiresolution Segmentation: An Optimization Approach for High Quality Multi-Scale Image Segmentation. J. Photogram. Remote Sensing 2000, 58, 12–23. [Google Scholar]
- Definiens Developer 7—Reference Book; Definiens AG: Munich, Germany, 2007; p. 197. Available online: http://www.ecognition.cc/download/ReferenceBook.
- Jensen, JR. Introductory Digital Image Processing; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2004. [Google Scholar]
- Fischler, MA; Bolles, RC. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar]
- Hartley, R; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed; Cambridge University Press: Cambridge, UK, 2003; p. 655. [Google Scholar]
- Khoshelham, K; Gorte, BG. Registering Point Clouds of Polyhedral Buildings to 2D Maps. Proceedings of the 3rd ISPRS International Workshop 3D-ARCH 2009: “3D Virtual Reconstruction and Visualization of Complex Architectures”, Trento, Italy, 25–28 February 2009.
- Vosselman, G. On the Estimation of Planimetric Offsets in Laser Altimetry Data. Proceedings of ISPRS Symposium, “Photogrammetric Computer Vision”, Graz, Austria, 9–13 September 2002; 375–380. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Overlap ID | Strip | Number of points in the strip overlap | Overlap Width (m) | ||
|---|---|---|---|---|---|
| 1st | 2nd | 1st | 2nd | ||
| o1 | s3 | s4 | 21,731,922 | 27,885,585 | 200 |
| o2 | s4 | s5 | 23,114,236 | 28,984,667 | 175 |
| o3 | s5 | s6 | 28,984,667 | 51,271,482 | 240 |
| o4 | s7 | s8 | 24,693,624 | 24,953,061 | 175 |
| o5 | s9 | s8 | 24,534,357 | 22,834,121 | 175 |
| o6 | s9 | s10 | 35,156,934 | 22,427,804 | 240 |
| o7 | s10 | s11 | 10,303,345 | 7,590,510 | 200 |
| o8 | s12 | s13 | 24,771,459 | 19,671,036 | 240 |
| o9 | s14 | s13 | 3,267,309 | 4,177,717 | 525 |
| o10 | s15 | s13 | 22,910,115 | 14,855,334 | 240 |
| o11 | s2 | s1 | 4,618,326 | 5,251,392 | 485 |
| o12 | s2 | s3 | 4,618,326 | 6,164,108 | 485 |
| o13 | s1 | s3 | 65,247,718 | 77,060,363 | 320 |
© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Sande, C.v.d.; Soudarissanane, S.; Khoshelham, K. Assessment of Relative Accuracy of AHN-2 Laser Scanning Data Using Planar Features. Sensors 2010, 10, 8198-8214. https://doi.org/10.3390/s100908198
Sande Cvd, Soudarissanane S, Khoshelham K. Assessment of Relative Accuracy of AHN-2 Laser Scanning Data Using Planar Features. Sensors. 2010; 10(9):8198-8214. https://doi.org/10.3390/s100908198
Chicago/Turabian StyleSande, Corné van der, Sylvie Soudarissanane, and Kourosh Khoshelham. 2010. "Assessment of Relative Accuracy of AHN-2 Laser Scanning Data Using Planar Features" Sensors 10, no. 9: 8198-8214. https://doi.org/10.3390/s100908198
APA StyleSande, C. v. d., Soudarissanane, S., & Khoshelham, K. (2010). Assessment of Relative Accuracy of AHN-2 Laser Scanning Data Using Planar Features. Sensors, 10(9), 8198-8214. https://doi.org/10.3390/s100908198