Mechatronic Description of a Laser Autoguided Vehicle for Greenhouse Operations



Abstract
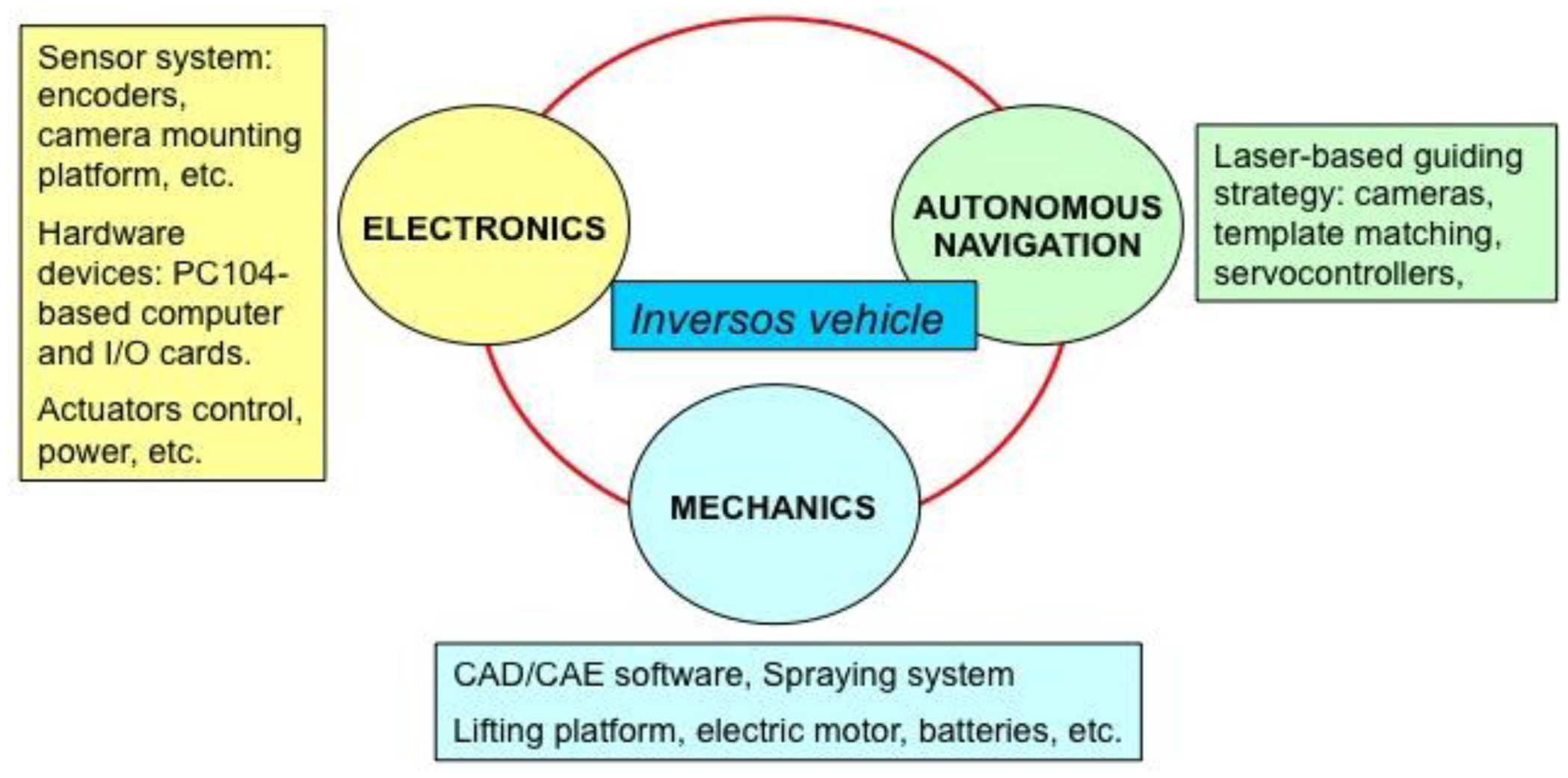
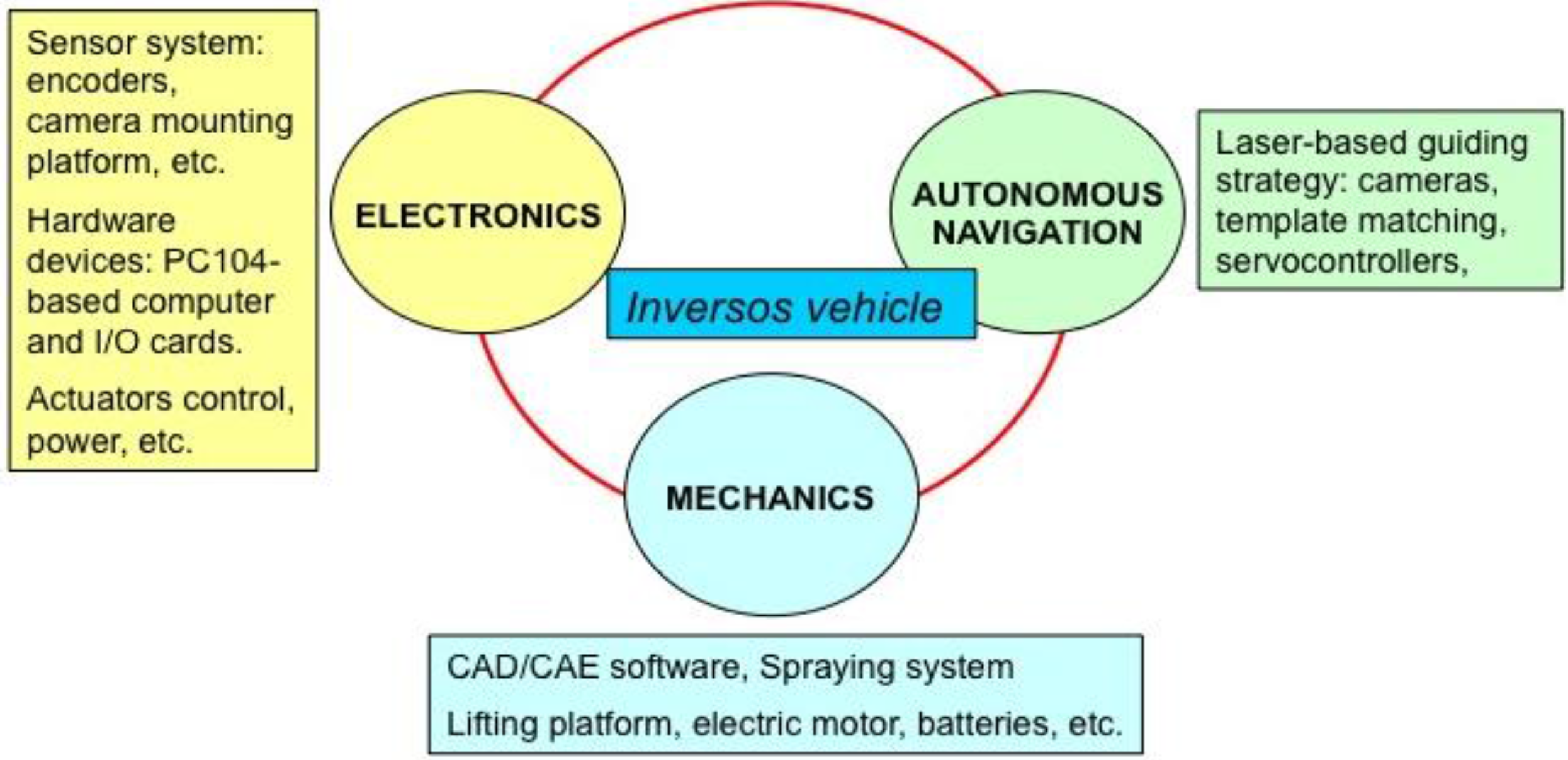
:1. Introduction
2. Mechanical Description
- It must move on a soft soil (typical of south-eastern Spanish greenhouses) and in an environment with many obstacles and tight spaces.
- It must have enough capacity for optimal work performance.
- It must perform different tasks within the greenhouse.
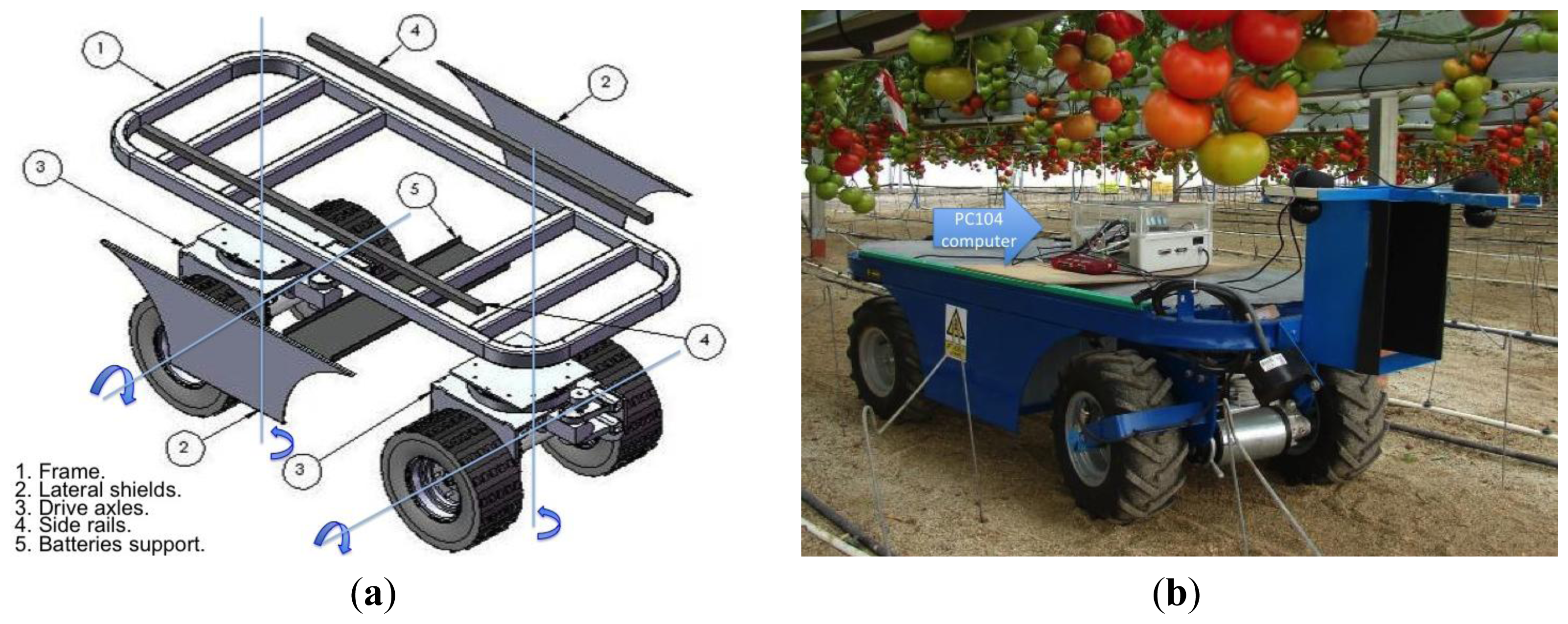
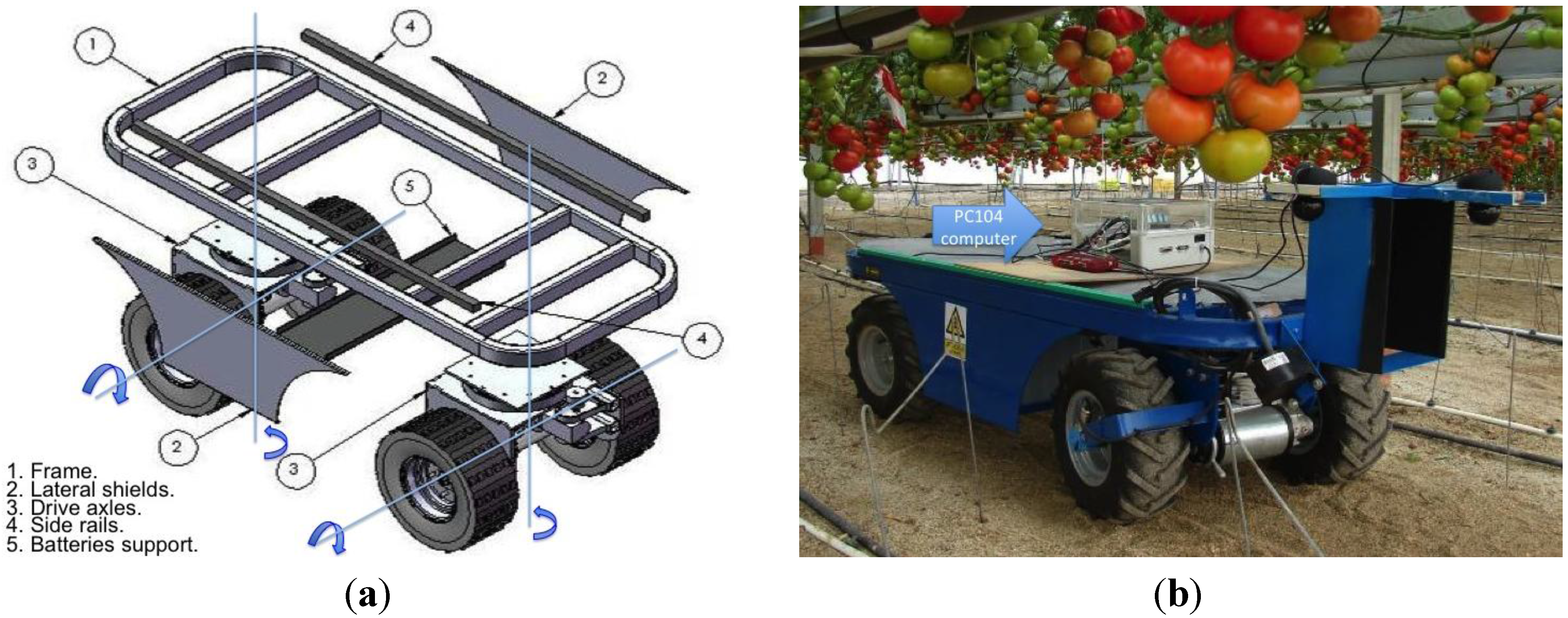
2.1. Dimensions and Frame
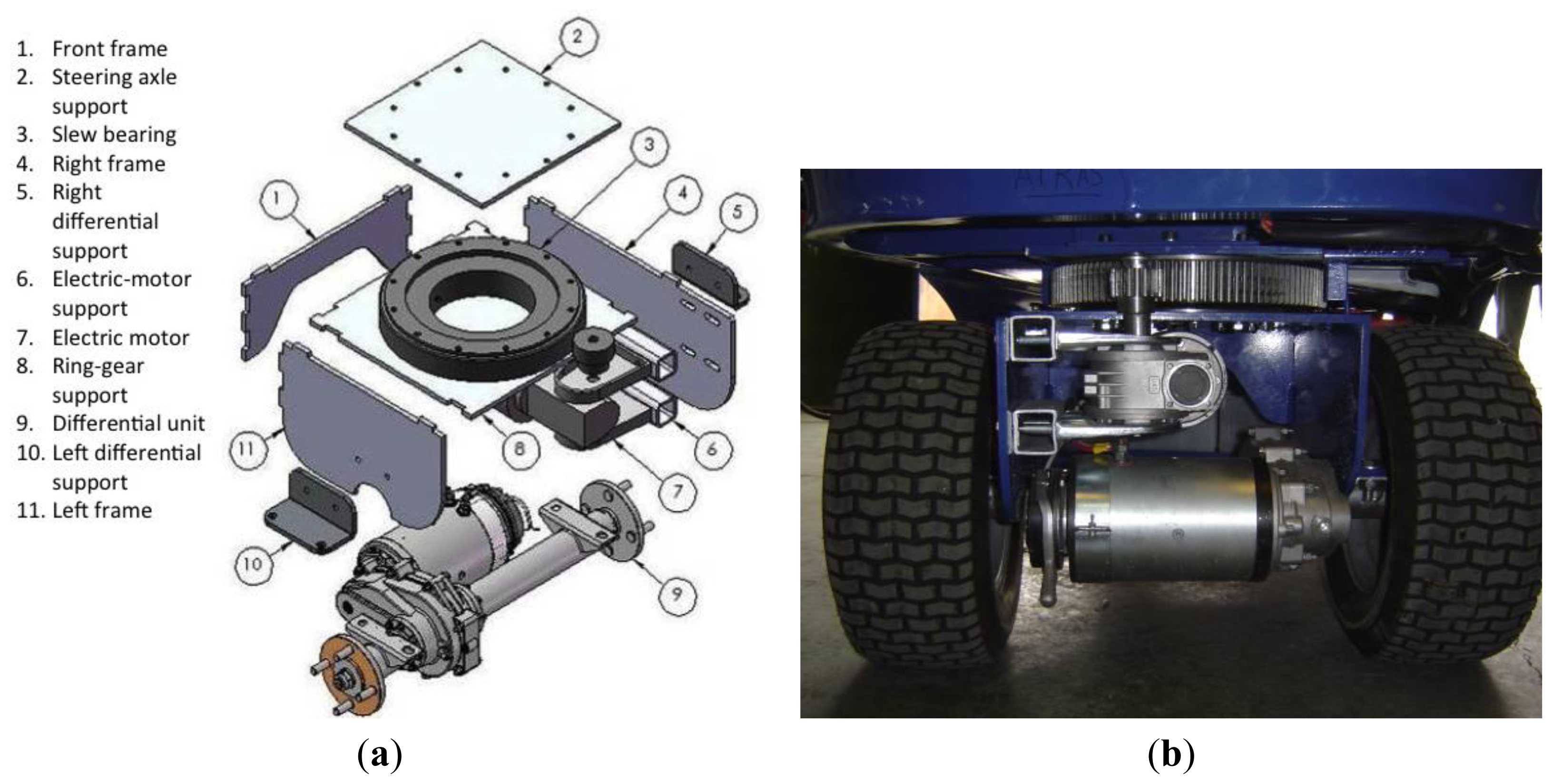
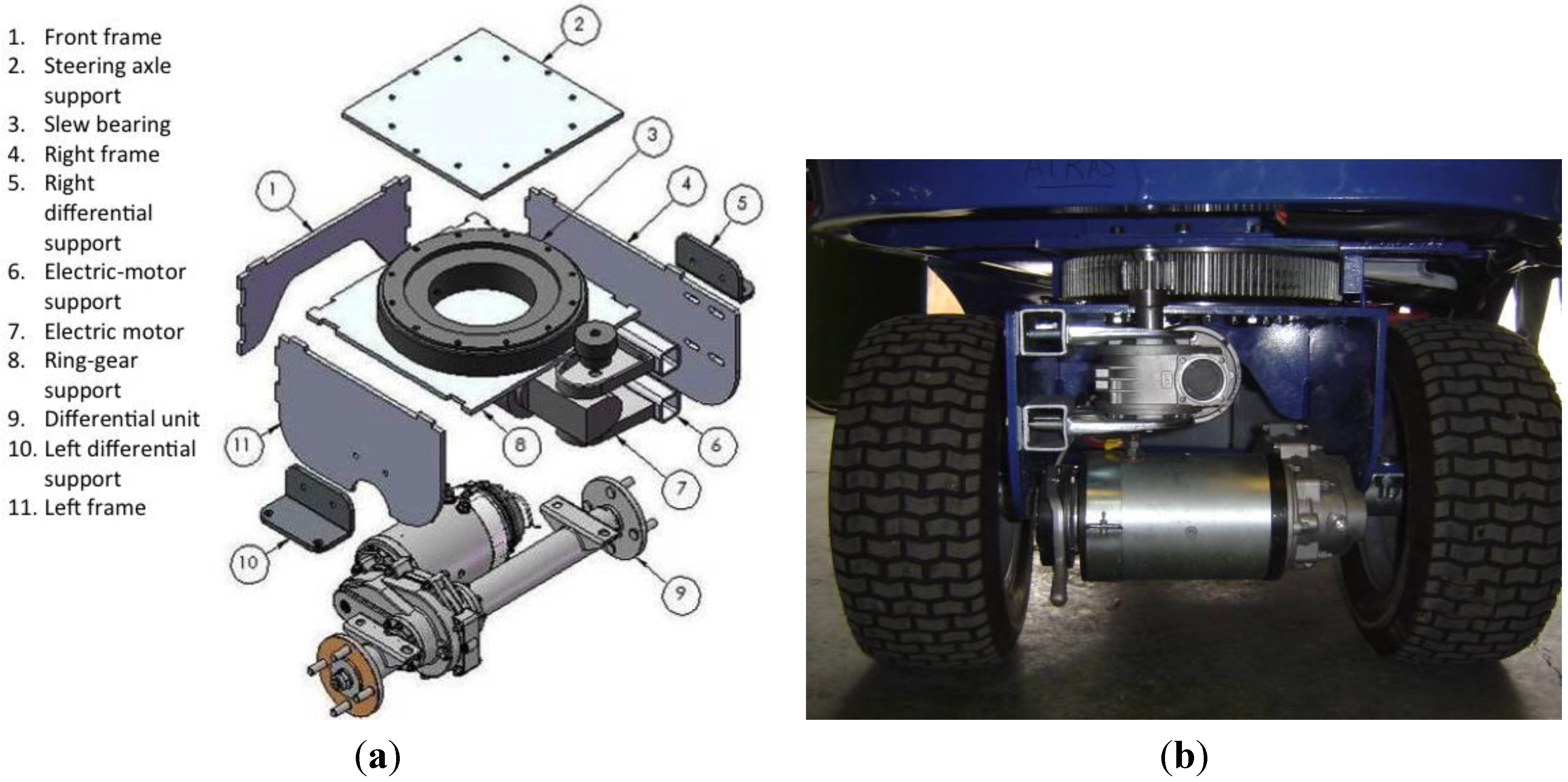
2.2. Steering System
2.3. Propulsion System
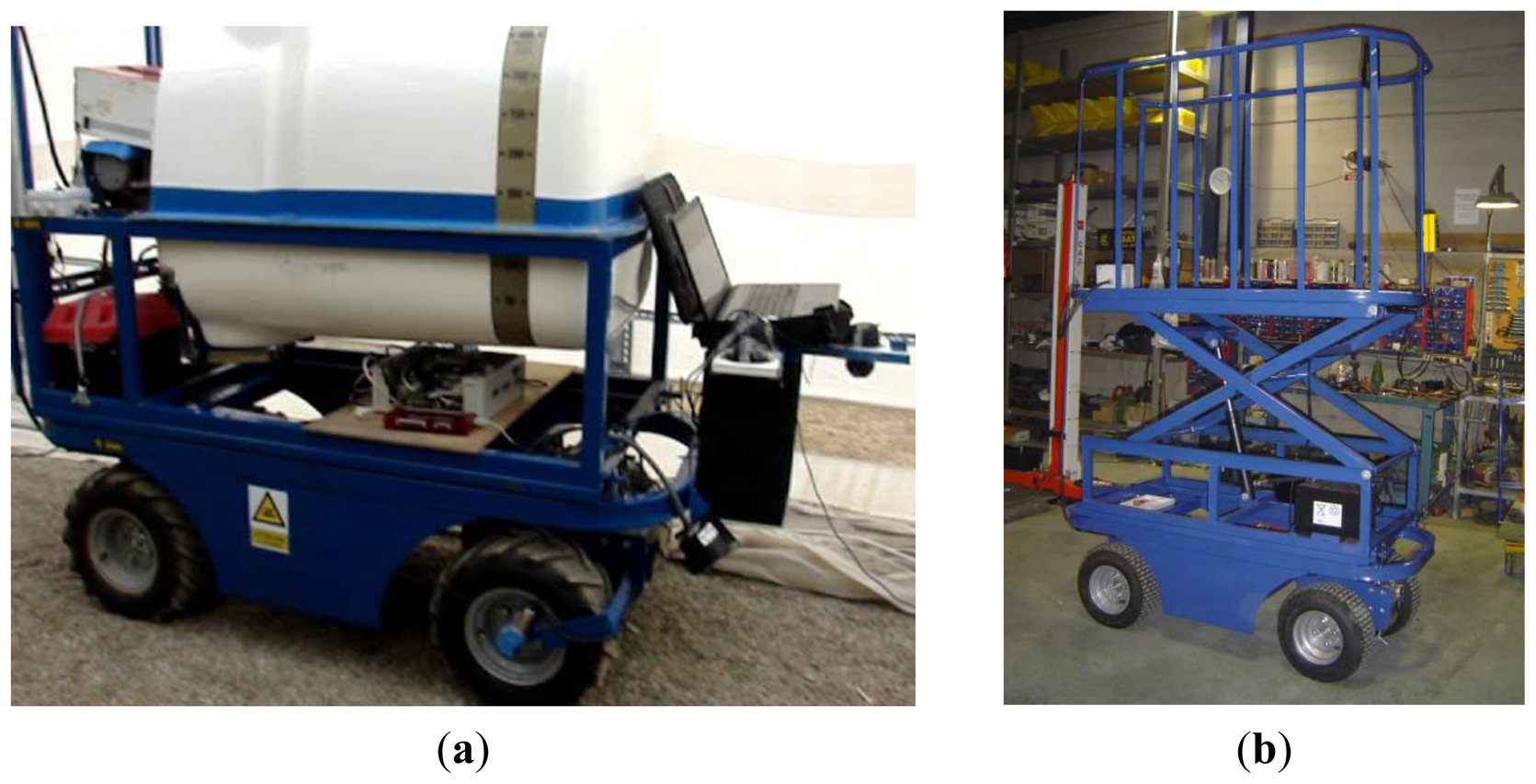
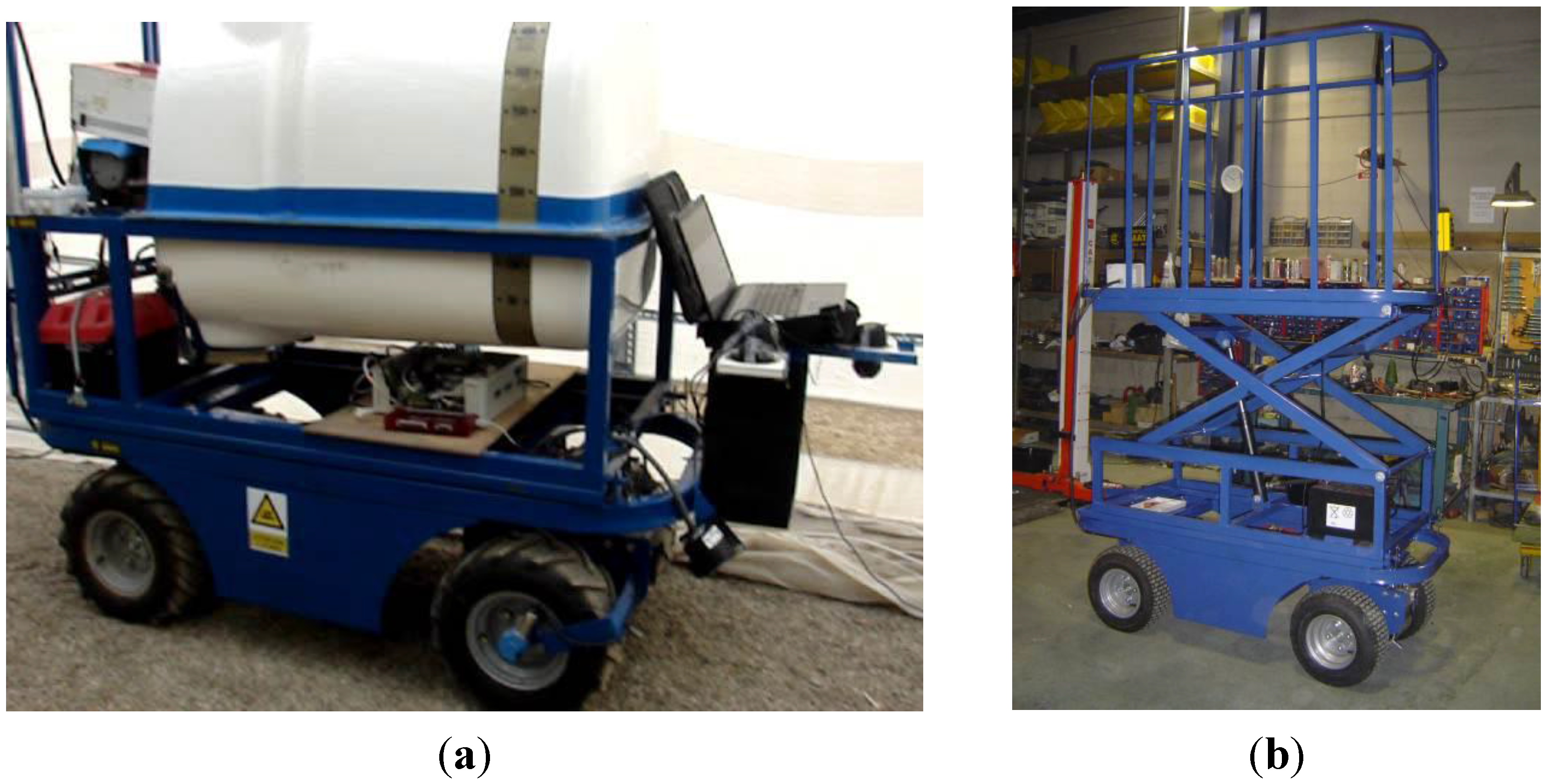
2.4. Tools for Agricultural Tasks
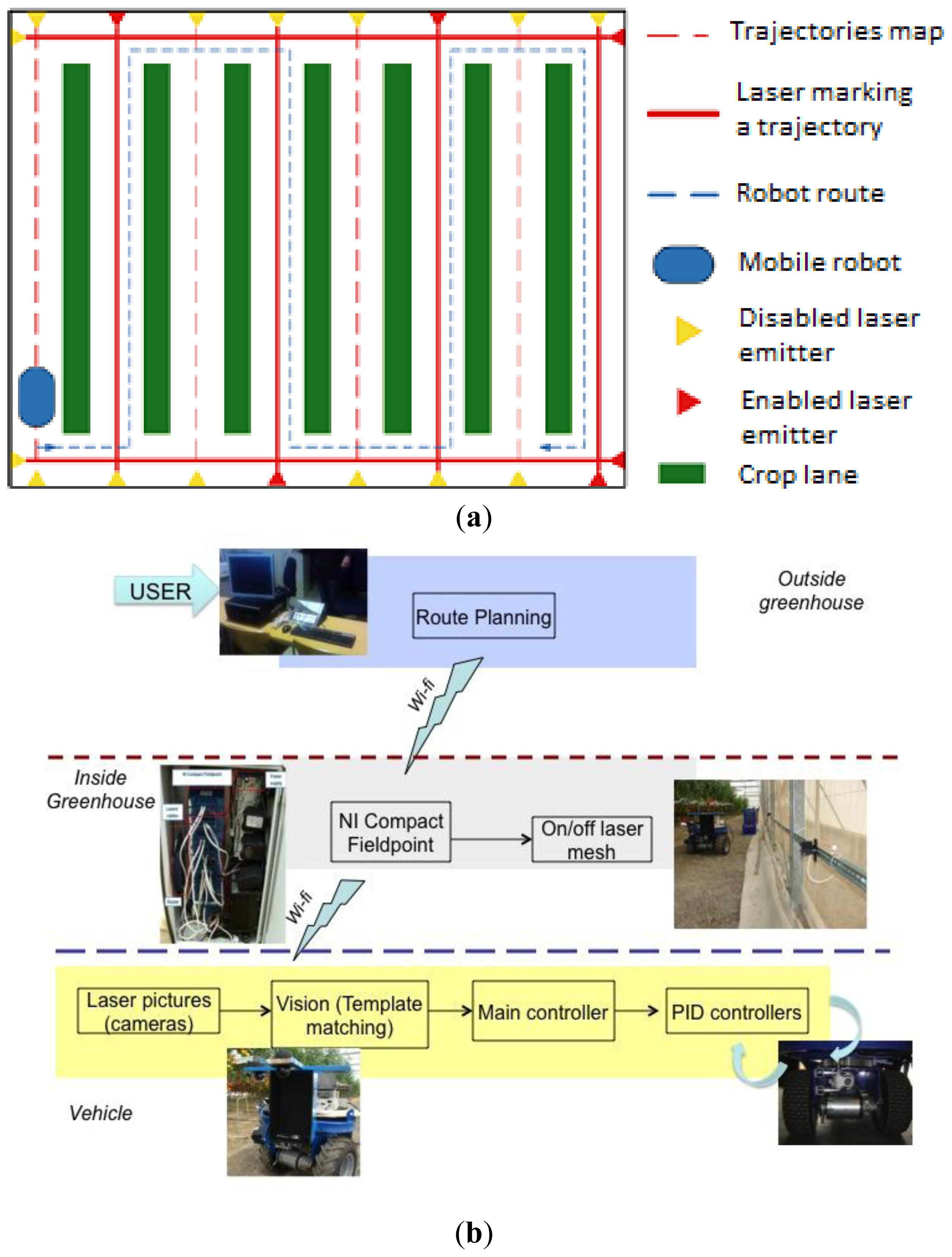
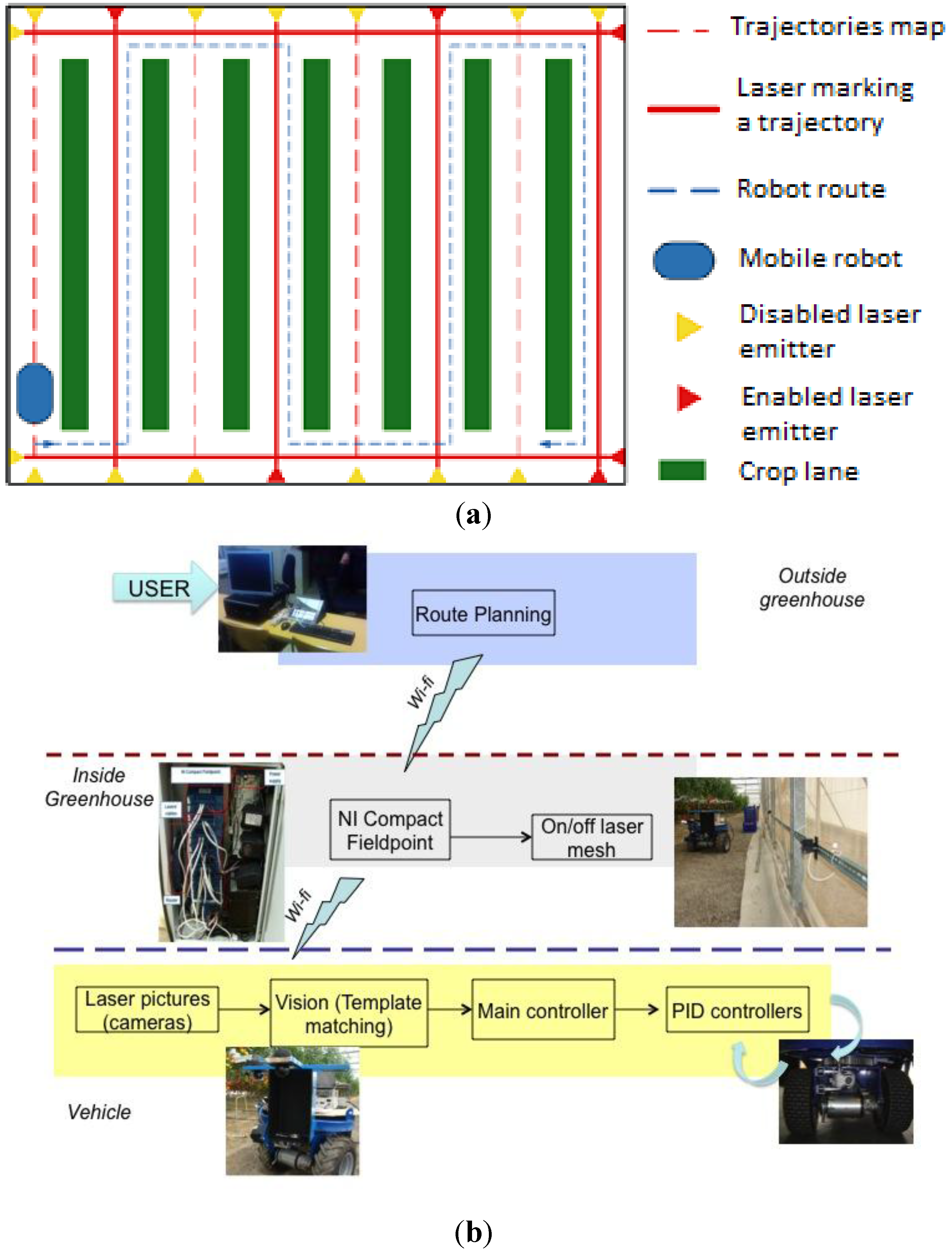
3. Laser-Based Guiding Strategy
3.1. Laser-Based Vision Approach
3.2. Laser-Based Vision Approach. Practical Considerations
4. Electronics and Hardware Components
4.1. Sensors
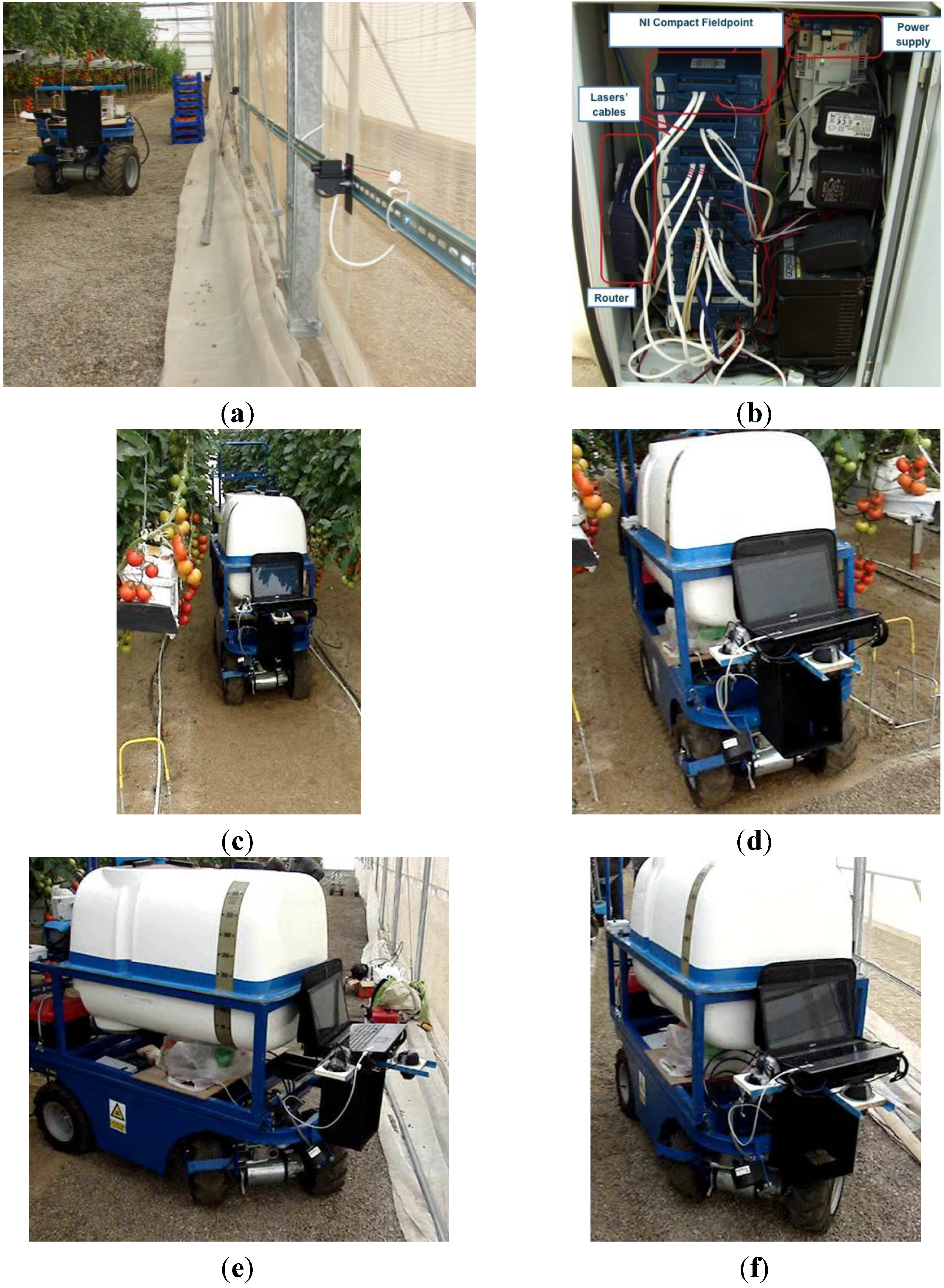
4.2. Computer on Board the Autonomous Vehicle
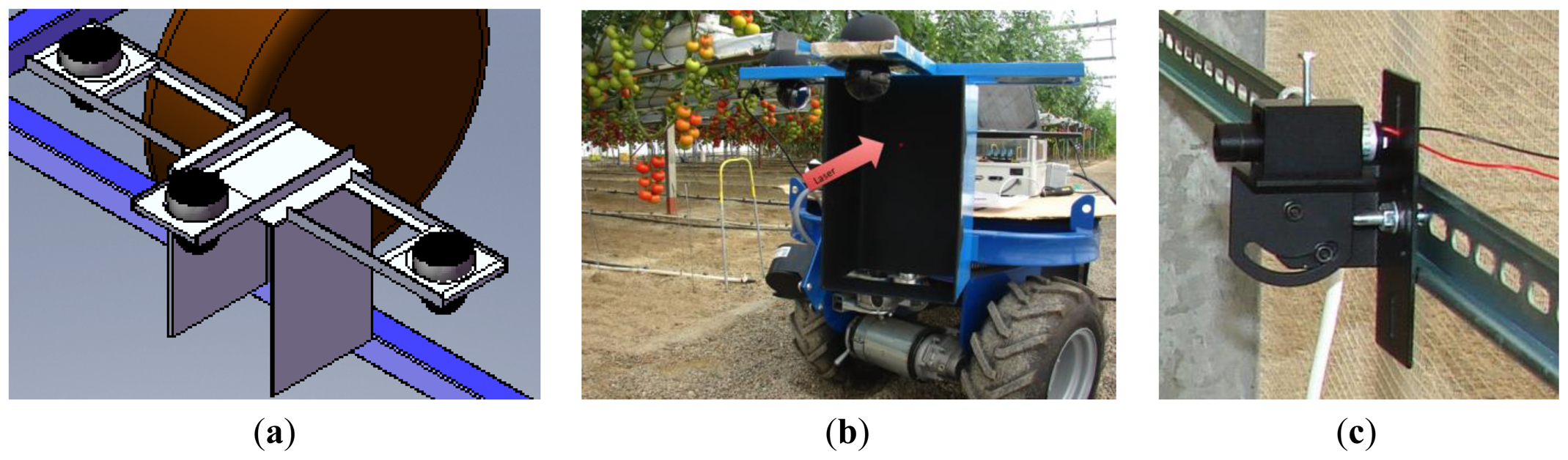
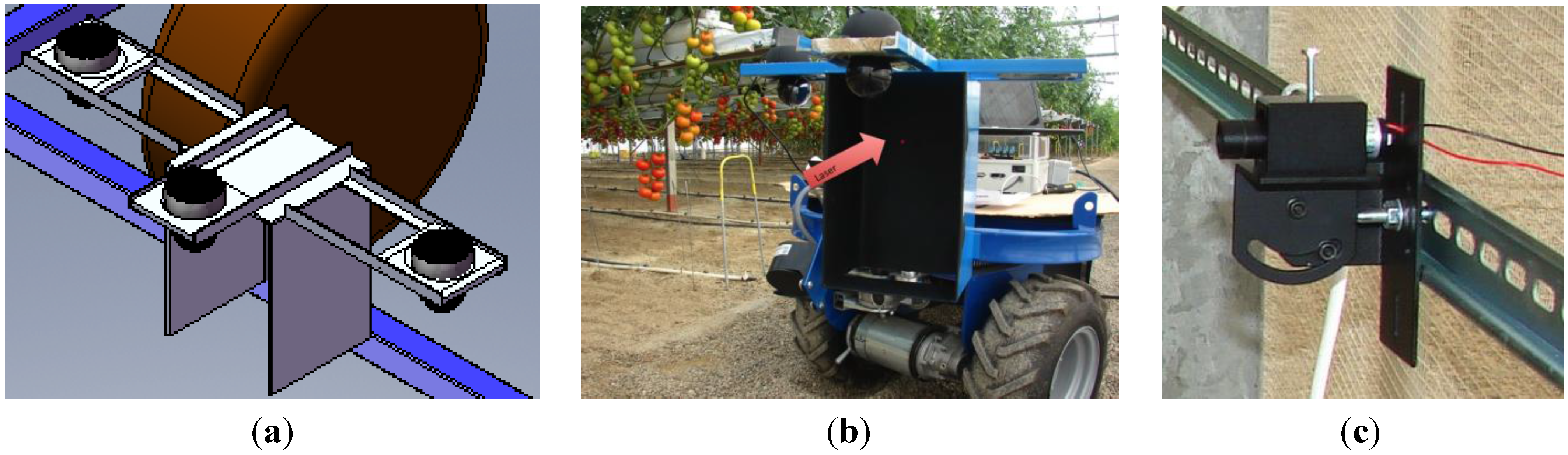
4.3. Camera-Support Mechanism
4.4. Laser Emitters
5. Results
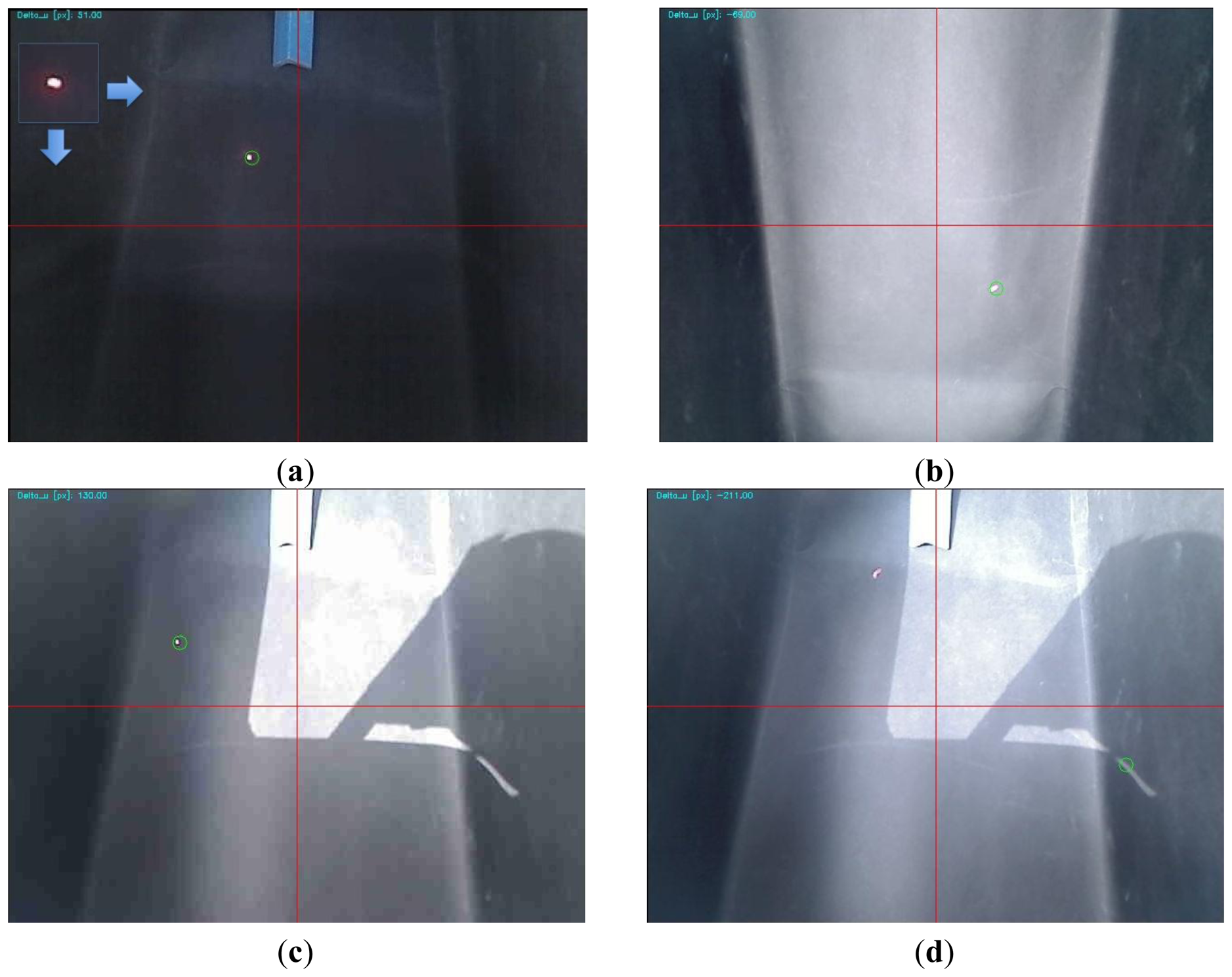
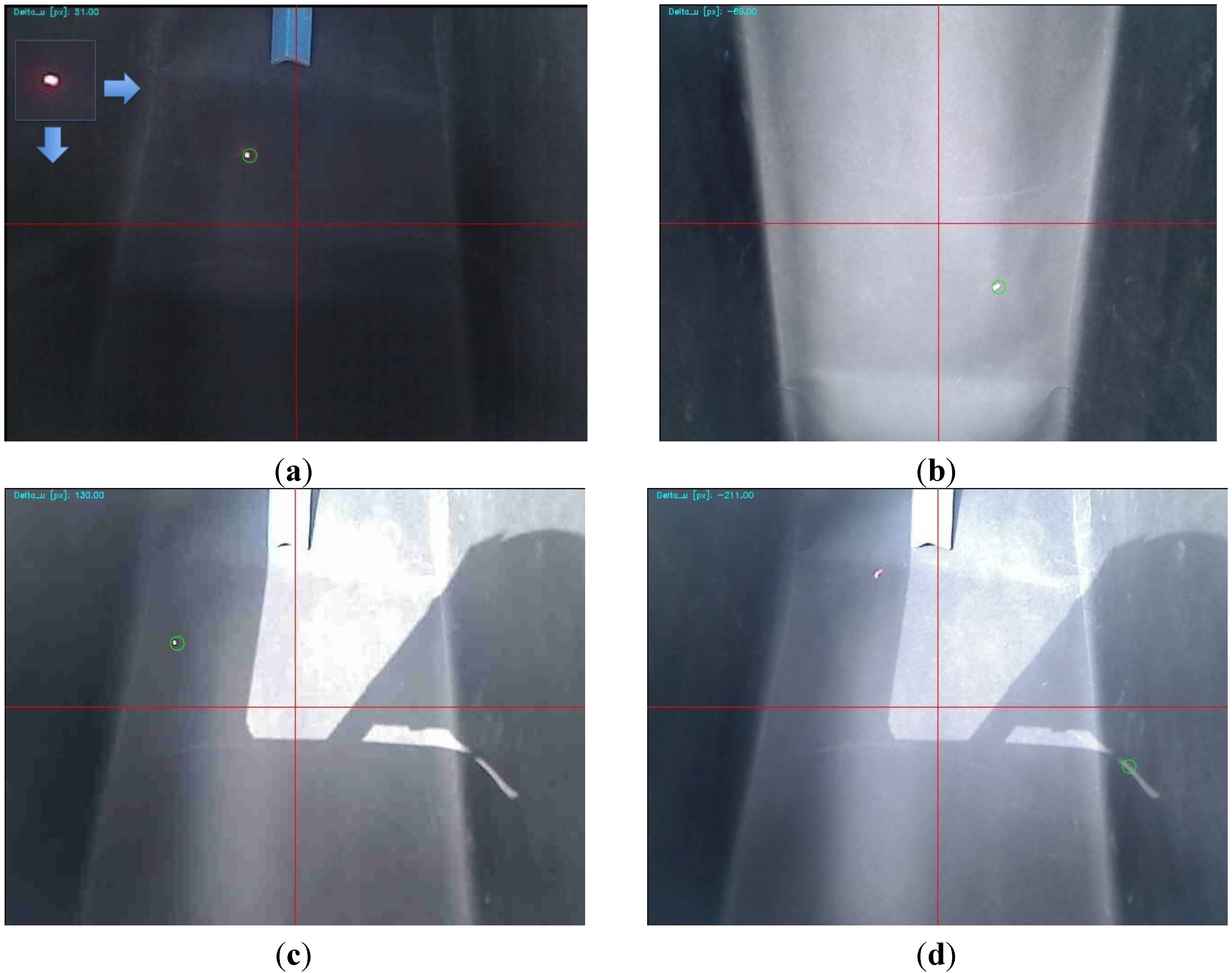
5.1. Vision Results
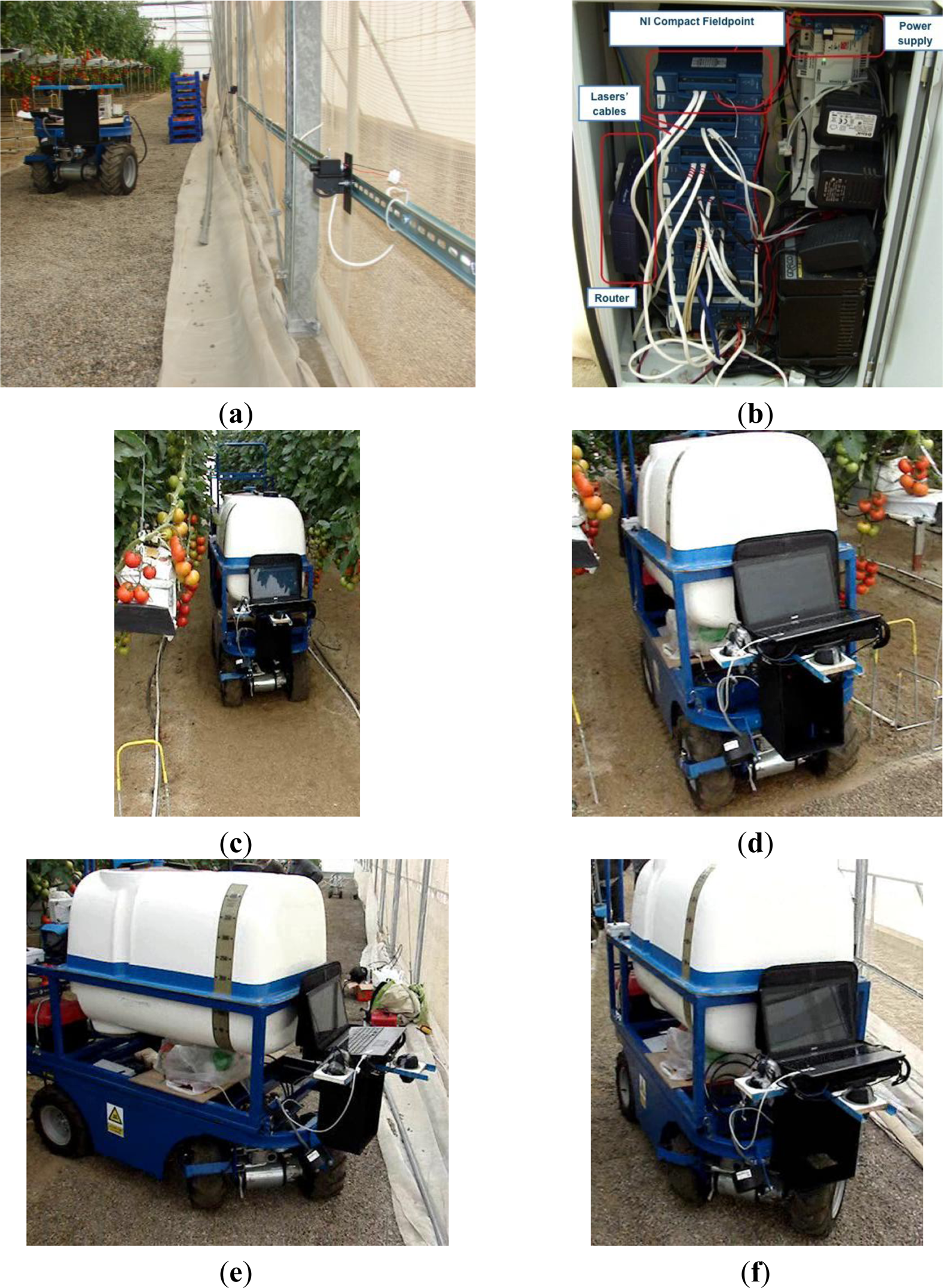
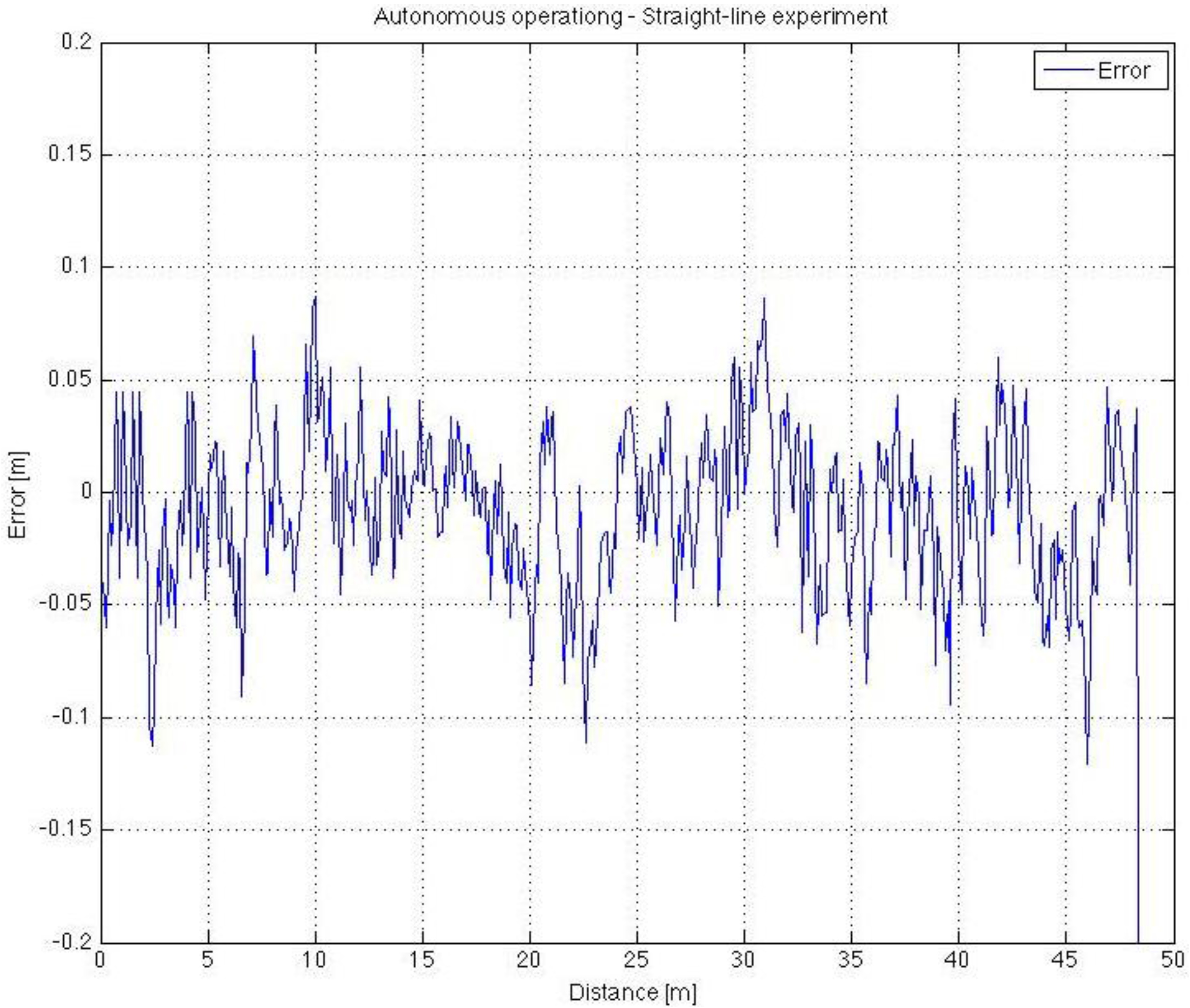
5.2. Autonomous Operation. Preliminary Results
6. Discussion and Conclusions
Acknowledgments
References
- Derksen, R.C.; Frantz, J.; Ranger, C.M.; Locke, J.C.; Zhu, H.; Krause, C.R. Comparing greenhouse handgun delivery to poinsettias by spray volume and quality. Trans. ASABE 2008, 51, 27–33. [Google Scholar]
- Derksen, R.C.; Zhu, H.; Ozkan, H.E.; Hammond, R.B.; Dorrance, A.E.; Spongberg, A.L. Determining the influence of spray quality, nozzle type, spray volume, and air-assisted application strategies on deposition of pesticides in soybean canopy. Trans. ASABE 2008, 51, 1529–1537. [Google Scholar]
- Sánchez-Hermosilla, J.; Rincón, V.J.; Páez, F.; Agüera, F.; Carvajal, F. Field evaluation of a self-propelled sprayer and effects of the application rate on spray deposition and losses to the ground in greenhouse tomato crops. Pest Manag. Sci. 2011, 67, 942–947. [Google Scholar]
- Sánchez-Hermosilla, J.; Rincón, V.J.; Páez, F.; Fernández, M. Comparative spray deposits by manually pulled trolley sprayer and a spray gun in greenhouse tomato crops. Crop Prot. 2012, 31, 119–124. [Google Scholar]
- Nuyttens, D.; Braekman, P.; Windey, S.; Sonck, B. Potential dermal pesticide exposure affected by greenhouse spray application technique. Pest Manag. Sci. 2009, 65, 781–790. [Google Scholar]
- Nuyttens, D.; Windey, S.; Sonck, B. Optimisation of a vertical spray boom for greenhouse spray applications. Biosyst. Eng. 2004, 89, 417–423. [Google Scholar]
- Langenakens, J.; Vergauwe, G.; De Moor, A. Comparing hand-held spray guns and spray booms in lettuce crops in a greenhouse. Aspects Appl. Biol. 2002, 66, 123–128. [Google Scholar]
- Nuyttens, D.; Windey, S.; Sonck, B. Comparison of operator exposure for five different greenhouse spraying applications. J. Agric. Saf. Health 2004, 10, 187–195. [Google Scholar]
- Sánchez-Hermosilla, J.; Rodríguez, F.; González, R.; Guzmán, J.L.; Berenguel, M. A Mechatronic Description of an Autonomous Mobile Robot for Agricultural Tasks in Greenhouses. In Mobile Robots Navigation; Barrera, A., Ed.; InTech.: Rijeka, Croatia, 2010; pp. 583–608. [Google Scholar]
- Kondo, N.; Monta, M.; Noguchi, N. Agricultural Robots. Mechanisms and Practice, 1st ed.; Kyoto University Press: Kyoto, Japan, 2011. [Google Scholar]
- Comba, L.; Martínez, S.F.; Gay, P.; Aimonino, D.A. Reliable low cost sensors and systems for the navigation of autonomous robots in pot crop nurseries. Proceedings of International Conference on Robotics and Associated High-technologies and Equipment for Agriculture, RHEA'2012, Pisa, Italy, 19–21 September 2012; pp. 203–208.
- Gravalos, I.; Loutridis, S.; Moshou, D.; Gialamas, T.; Kateris, D.; Tsiropoulos, Z.; Xyradakis, P. Vibration effects of bumper suspension system on pipeline sensor-based platform for soil water monitoring. Proceedings of International Conference on Robotics and Associated High-technologies and Equipment for Agriculture, RHEA'2012, Pisa, Italy, 19–21 September 2012; pp. 209–214.
- Sammons, P.J.; Furukawa, T.; Bulgin, A. Autonomous pesticide spraying robot for use in greenhouse. Proceedings of Australian Conference on Robotics and Automation, Sydney, Australia, 5–7 December 2005; pp. 1–9.
- van Henten, E.J.; Hemming, J.; van Tuijl, B.A.J.; Kornet, J.G.; Meuleman, J.; Bontsema, J.; van Os, E.A. An autonomous robot for harvesting cucumbers in greenhouses. Autonom. Robot. 2002, 13, 241–258. [Google Scholar]
- González, R.; Rodríguez, F.; Sánchez-Hermosilla, J.; Donaire, J.G. Navigation techniques for mobile robots in greenhouses. Appl. Eng. Agric. 2009, 25, 153–165. [Google Scholar]
- Longo, D.; Pennisi, A.; Caruso, L.; Muscato, G.; Schillaci, G. An autonomous electrical vehicle based on low-cost ultrasound sensors for safer operations inside greenhouses. Proceedings of International Conference Ragusa, SHWA'2010, Ragusa, Italy, 16–18 September 2010; pp. 437–443.
- Mandow, A.; Gómez de Gabriel, J.M.; Martínez, J.L.; Muñoz, V.F.; Ollero, A.; García-Cerezo, A. The autonomous mobile robot Aurora for greenhouse operation. IEEE Robot. Auto. Mag. 1996, 3, 18–28. [Google Scholar]
- Subramanian, V.; Burks, T.F.; Singh, S. Autonomous greenhouse sprayer vehicle using machine visión and ladar for steering control. Appl. Eng. Agric. 2005, 21, 935–943. [Google Scholar]
- Borenstein, J.; Everett, H.R.; Feng, L. Navigating Mobile Robots. Systems and Techniques, 1st ed.; A.K. Peters, Ltd.: Wellesley, MA, USA, 1996. [Google Scholar]
- Plaza, V.; Rodríguez, F.; González, R. Vision system based-on RGB filter to guide autonomous vehicles in greenhouses. Proceedings of International Conference on Robotics and Associated High-technologies and Equipment for Agriculture, RHEA'2012, Pisa, Italy, 19–21 September 2012; pp. 189–194.
- Brunelli, R. Template Matching Techniques in Computer Vision: Theory and Practice, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- González, R.; Rodríguez, F.; Guzmán, J.L.; Pradalier, C.; Siegwart, R. Combined visual odometry and visual compass for off-road mobile robots localization. Robotica 2012, 30, 865–878. [Google Scholar]
- Bradski, G.; Kaehler, A. Learning OpenCV: Computer Vision with the OpenCV library, 1st ed.; O'Reilly Media: Sebastopol, CA, USA, 2008. [Google Scholar]
- PC104 Embedded Consortium. Available online: http://www.pc104.org (accessed 15 November 2012).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Mark, Model | Range | Resolution | Signal Output |
|---|---|---|---|---|
| Incremental encoder | Sick, DRS61 | 0–360° | 1,024 pulse/rev. | Pulse |
| Absolute Encoder | Sick, ARS60 | 0–360° | - | Gray code |
| Feature | Description |
|---|---|
| CPU | Intel Atom N450 1.67 GHz |
| Memory | SDRAM 2 GB |
| Cache | 512 KB |
| Chipset | Intel Atom N450 |
| Interfaces | 4 USB, Ethernet, Audio, Serial, PS2. |
| Graphic Card | Intel Gen 3.5 DX9 |
| Power | 12 VDC |
| Temperature | 0–60° |
| HDD | 160 GB (S-ATA) |
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Sánchez-Hermosilla, J.; González, R.; Rodríguez, F.; Donaire, J.G. Mechatronic Description of a Laser Autoguided Vehicle for Greenhouse Operations. Sensors 2013, 13, 769-784. https://doi.org/10.3390/s130100769
Sánchez-Hermosilla J, González R, Rodríguez F, Donaire JG. Mechatronic Description of a Laser Autoguided Vehicle for Greenhouse Operations. Sensors. 2013; 13(1):769-784. https://doi.org/10.3390/s130100769
Chicago/Turabian StyleSánchez-Hermosilla, Julián, Ramón González, Francisco Rodríguez, and Julián G. Donaire. 2013. "Mechatronic Description of a Laser Autoguided Vehicle for Greenhouse Operations" Sensors 13, no. 1: 769-784. https://doi.org/10.3390/s130100769
APA StyleSánchez-Hermosilla, J., González, R., Rodríguez, F., & Donaire, J. G. (2013). Mechatronic Description of a Laser Autoguided Vehicle for Greenhouse Operations. Sensors, 13(1), 769-784. https://doi.org/10.3390/s130100769