The Recovery of Weak Impulsive Signals Based on Stochastic Resonance and Moving Least Squares Fitting



Abstract
: In this paper a stochastic resonance (SR)-based method for recovering weak impulsive signals is developed for quantitative diagnosis of faults in rotating machinery. It was shown in theory that weak impulsive signals follow the mechanism of SR, but the SR produces a nonlinear distortion of the shape of the impulsive signal. To eliminate the distortion a moving least squares fitting method is introduced to reconstruct the signal from the output of the SR process. This proposed method is verified by comparing its detection results with that of a morphological filter based on both simulated and experimental signals. The experimental results show that the background noise is suppressed effectively and the key features of impulsive signals are reconstructed with a good degree of accuracy, which leads to an accurate diagnosis of faults in roller bearings in a run-to failure test.1. Introduction
An impulsive signal is a typical vibration response due to faults in many mechanical components such as bearings and gears. It is characterized by the presence of a periodic repetition of sharp peaks modulated by high frequency harmonic components, which are defined in terms of natural frequency, fault frequency and decay coefficient [1]. In mechanical systems, a regularity of impulsive signals may arise from rotor-to-stator rub, defects or wear of certain parts such as bearings and gears. Impulsive signals can also be generated by many other mechanisms and can be found in many other applications. Acoustic noise and image noise are typical examples [2–7]. An impulsive signal often contains important equipment status information and is also important for system maintenance and process automation. Thus, detecting impulsive signals is of great engineering practical significance, and this has attracted the attention of many researchers.
However, impulsive signals are frequently overwhelmed by strong noise when the fault is at its early engine phase. The impulsive signals may be filtered out because the impulsive energy of the incipient anomaly is very small and the transmission channel is frequently complex. Numerous attempts have been made to extract useful information from such response signals. For example, envelope analysis is widely used [8–11]. Lou and Loparo [8] employed wavelet envelope analysis in the fault diagnosis of rolling bearings and claimed that the decomposed details are different in magnitude between the inner race fault and normal condition. Yu et al. [9] applied the EMD and Hilbert method to extract the envelope signal of rolling bearings and found that the fault characteristics can be extracted by selecting proper IMFs. A morphological filter is also an efficient tool in processing impulsive signals. Jing [1] proposed an improved morphological filter for the feature extraction of impulsive signals in the time domain, which aims to extract the entire signal including fault frequency, natural frequency and decay coefficient. Laplace wavelet correlation filtering (LWCF), which uses a Laplace wavelet as the transient model and identifies the parameters by correlation filtering, is effective in detecting a single transient [10]. However, these methods are not suitable for extracting signal features of impulsive signals with strong background noise.
With the aid of stochastic resonance, the unavoidable noise can, however, be applied to enhance the signal-to-noise ratio (SNR) of a system's output. Although the SR method uses random noise to enhance the useful signal characteristics, the signals after SR is often distorted into rectangular-like waves by its nonlinear amplification, which confines the use of SR in the quantitative diagnosis of machinery. Li [11] presented an inversion method to restore the output waveform after SR. However, it is still necessary to locate the inflection point of the system and carry out corresponding special treatment. The program is complicated and requires adjustment of various parameters.
To overcome the reviewed problems, the present study concentrates on developing a more effective technique for extracting impulsive signals with strong noise contamination that cannot be extracted using a morphology filter or other filters. The fault period and phase of impulsive signals are extracted after SR. However, there are still two problems with the SR recovery process. The first problem is intercepting data that contain only a single period of impulsive signals. The recovery process for impulsive signals is different from that of cosine signals or others because of the compact characteristic of impulsive signals in the time domain. To realize the piecewise fitting of data, a moving least squares fitting operation is applied to segment data in the time domain using a sliding window. Using the fault period and phase obtained in the first SR, we can intercept the data that contain only single shocks of attenuation signals. A second stochastic resonance with the intercepted data is then used to obtain damping of the oscillation frequency of the signal to improve inversion results. The experimental results show that the background noise is suppressed effectively and the key features of impulsive signals are reconstructed with good degree of accuracy, which leading to an accurate diagnosis of faults on bearings undertaking a run-to failure test.
2. Stochastic Resonance and Impulsive Signal Recovery
2.1. The Theory of Stochastic Resonance
Stochastic resonance (SR) is a nonlinear physical phenomenon where weak signals are enhanced and the noise is weakened through the interaction of a small parameter signal and noise for a nonlinear system model. SR is widely used in the extraction of weak cosine-like signals. However, impulsive signals are more common in mechanical systems. In this section the Kramers rate is used to explain the SR characteristic of impulsive signals.
The over-damped motion of a Brownian particle in a bistable potential in the presence of noise and periodic force is considered to describe SR, as in Equation (1) [12,13]:
The crucial process of using SR to detect weak signals is to adjust the interaction of signal and noise to let the Brownian particle jump freely into the left or right potential. The height of the potential barrier is ΔU = a2/(4b). In this paper, a normalized scale transformation is applied to enable the classical SR approach to detect signals with large parameters like in [13].
2.2. Nonlinear Distortion Phenomenon of SR
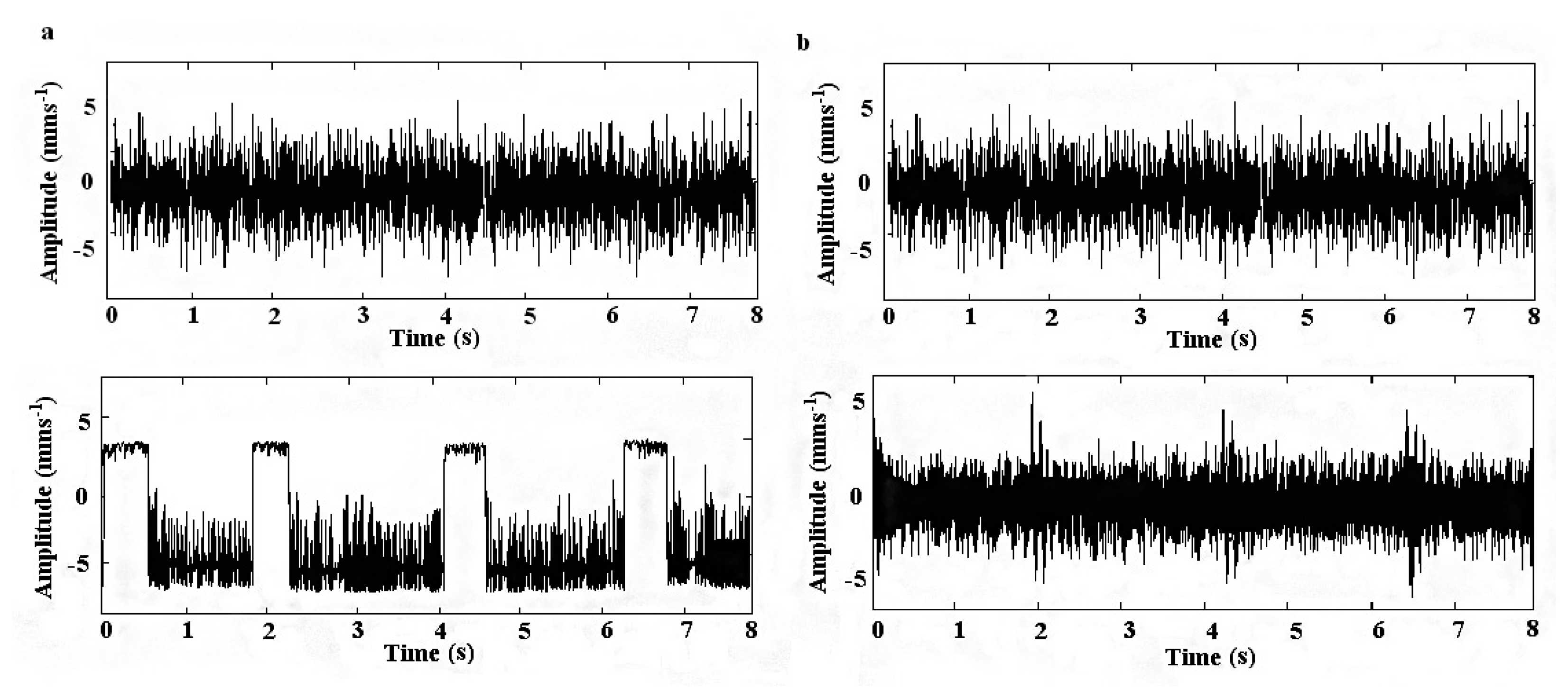
Although the SR method uses random noise to enhance the useful signal characteristics, the signals after SR is often distorted into rectangular-like waves by its nonlinear amplification, which confines the use of SR in the quantitative diagnosis of machinery. To realize the quantitative diagnosis of rotating machine faults, we need an accurate value for the amplitude of impulsive signal. Hence, we need to study the inversion method for SR. The trajectory of the Brownian particle excited by an impulsive signal can show two different forms of output waves when SR occurs: one is a trapezoidal wave and the other is the form of impulses as shown in Figure 1a,b. As the trapezoidal waveform cannot be easily controlled, and its corresponding SR evaluation index is difficult to select, this resonance form is frequently neglected in practice. As shown in Figure 1a,b, a trapezoidal wave can be used to clearly judge the SR results, and it is more exact when evaluating the information pertaining to fault frequency and phase. In this paper, an adaptive algorithm is applied to enable the classical SR approach to detect the signals concerned in [14,15].
2.3. The Recovery of Impulsive Signals
Stochastic resonance can qualitatively judge whether there is any fault, yet it is not suited for quantitative diagnosis because of the nonlinear amplification due to SR. To realize the quantitative diagnosis of rotating machine faults, we need an accurate value for the amplitude of impulsive signal. Hence, we need to study the inversion method for SR.
Traditional curve fitting is a global fitting, which is not suitable for impulsive signals. To realize the piecewise fitting of data, a moving least squares fitting operation is applied to data segment in the time domain using a sliding window.
Let u(x) be an unknown function whose values are known in the Ω calculation domain N nodes (I = 1, 2… N), namely, UI = u(x1). Additionally, in the calculation domain of Ωx, uh (x) is used as the approximation of u(x) and can be represented as the polynomial:
The moving least squares is to get the weighted sum of squares a minimum structure approximation function through the difference between the order and the corresponding node function value, that is to let Equation (4) take the minimum:
Equation (4) takes the minimum solution of the coefficient vector a(x):
Substituting Equation (3) with Equation (5):
Usually a monomial is selected as the base function, such that a one-dimensional space monomial and quadratic basis function, respectively, are as follows:
A two-dimensional space monomial and quadratic basis function are, respectively, as follows:
This paper focuses on impulsive signals, so we choose the following function as the basis function. As to the fit of weak impulsive signals, ωs is important because, without it, the least squares fitting will not lead to correct results:
In addition, the weight function should: be compact, that is only in the surrounding area is it not equal to zero but in all other areas it is zero; be negative; attenuate, along with the increasing domain |x − xI|, ω(x − xI), gradually decay. In this paper, the Gaussian Function (15) is selected as the weight function,
2.4. Algorithm Construction
The impulsive signal is constructed as:
First, reading the original signal and the sample rate, the initialization of A(0), T0(0), τ0(0), K(0), ωs(0), Dc(0) are estimated. These parameters indicate the probable geometric characteristics of the impulsive signal. Then, two steps of adaptive parameter-tuning stochastic resonance are used to update T0, τ0, k and ωs, which are shown in Figure 3:
- Step 1.
Estimate the value of T0, let a = 1/T0(0), b(n) = 0:a.
- Step 2.
According to the adaptive optimization algorithm, we use parameter-tuning stochastic resonance to obtain T0, τ0, and k.
- Step 3.
According to the value of T0 and τ0, we extract s′(t) for K = 1.
- Step 4.
Estimate the value of ωs, let a = 1/ωs(0), b(n) = 0:a.
- Step 5.
According to the adaptive optimization algorithm, another parameter-tuning stochastic resonance is used to obtain ωs, which is important because, without it, the moving least squares fitting will not lead to a reasonable result.
Next, the least squares fitting using a Gaussian function as the weight function, the impulsive signal as the interval function and ωs as the known parameter is used to obtain A and Dc. A can then be used to realize the quantitative fault diagnosis of the rotating machine.
3. Numerical Evaluation
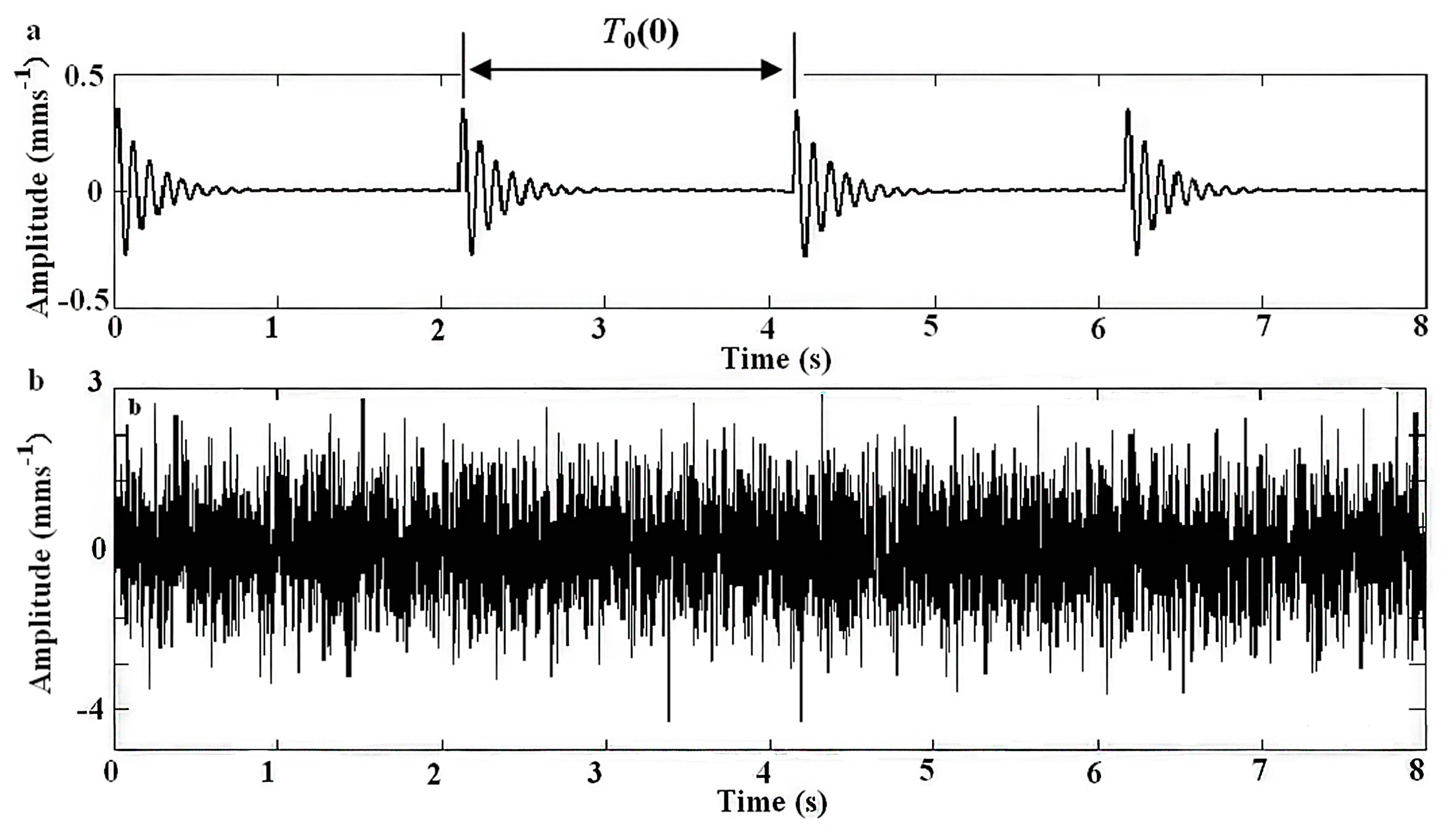
To illustrate the effectiveness of the proposed method in detecting and recovering of weak impulsive signals, a simulation is carried out based the signal in Equation (17):
The adaptive parameter-tuning stochastic resonance and moving least-squares fitting is adapted to extract and recover the impulsive signal. Following the previous section's steps, the results obtained by the proposed method from the simulation signal are shown. The result of the first parameter-tuning stochastic resonance is shown in Figure 5, which shows that T0 = 2.1 s, k = 4, τ0 = 0.
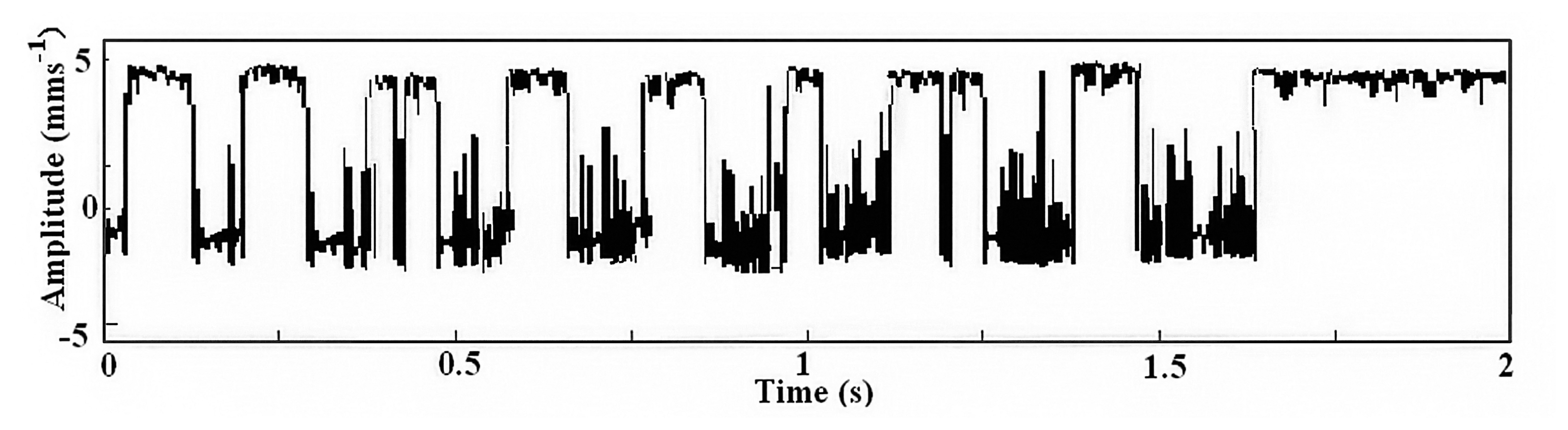
Then, considering that T0 = 2.1 s, k = 4, τ0 = 0, a segment of data was segregated in the time range [0, 2] from the above simulation signal as shown in Figure 6.
The result of the second parameter-tuning stochastic resonance is shown in Figure 7, and a FFT algorithm is used to find ωs ≈ 62.83 Hz.
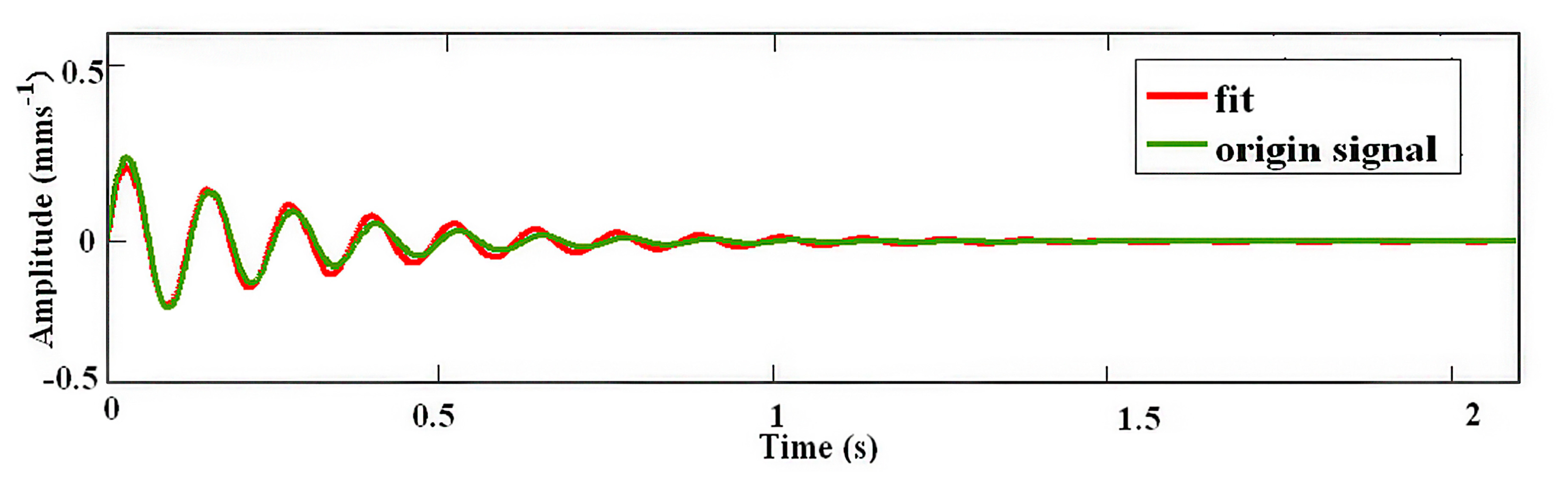
The result of the least squares fitting is shown in Figure 8, from which it has found that A = 0.38 mms−1 and Dc = 5.
A direct comparison between the original transient and reconstructed signal is shown in Figure 9. It can be seen they display good agreement.
A comparison with morphological filtering is illustrated in Figure 10. A Laplace wavelet is chosen as the structural element of the morphological filtering. It can be found that the impulsive cluster is not extracted from the original because of the influence of strong noise. Additionally, the traditional recovery method for SR does not involve a sliding window, which is vital to the compact characteristic of impulsive signals in the time domain. Thus, the morphological filtering method cannot be used in the recovery of the impulsive signal after SR.
The simulation results demonstrate the effectiveness and superiority of the proposed method in the detection of weak impulsive signals.
4. Application in Rotating Machine Fault Diagnosis
To validate the proposed method a bearing run-to-failure test was performed under normal load conditions on a specially designed test rig. The bearing test rig consisted of four test bearings on one shaft. The shaft was driven by an AC motor and coupled by rub belts. The rotation speed was kept constant at 2000 rpm. A radial load of 2000 N was added to the shaft and bearing by a spring mechanism. All the bearings were lubricated through an oil circulation system which regulates oil flow to maintain constant temperature of the lubricant. Figure 11 shows the test rig and illustrates sensor placement. The failure of all bearings occurred after exceeding the designed lifetime of the bearing, which is more than 100 million revolutions.
A magnetic plug installed in the oil feedback pipe collected debris from the oil as evidence of bearing degradation. The test stopped when the accumulated debris adhered to the magnetic plug exceeded a certain level and caused an electrical switch to close. Four Rexnord ZA-2115 double row bearings were installed on one shaft as shown in Figure 11. The bearings had 16 rollers in each row, a pitch diameter of 7.15 cm, roller diameter of 0.841 cm, and a tapered contact angle of 15.171°. A PCB 353B33 High Sensitivity Quartz ICPs accelerometer was installed on the housing of each bearing. Four thermocouples were attached to the outer race of each bearing to record bearing temperature for monitoring the lubrication. Vibration data were collected every 10 min by a National Instruments DAQ Card-6062E data acquisition card. The data sampling rate was 20 kHz and the data length was 20,480 points. Data collection was controlled by a National Instruments LabVIEW program. The parameters of the experimental bearing are shown in Table 1. BPFI, BPFO, BSF and FTF represent the characteristic frequency of the inner race fault, outer race fault, ball fault and the cage fault, respectively.
Figure 12 shows the monitoring result for the whole test using, which are obtained by using the morphological filter and the time complexity to the vibration data. In [16] the monotone increasing trend of the result has been viewed into five phases to represent different degrees of severity and fault progression. However, it is clear that the morphological filter cannot extract fault information before and near the symbols ⊙ in Phase I.
To demonstrate the effectiveness of current method, signals in Phase I are used for applying the adaptive parameter-tuning stochastic resonance and moving least squares fitting. Figure 13 shows a segment of the signal measured at time instant of 5000 min. From it there is no impulsive information which can be observed.
The result of the first parameter-tuning stochastic resonance is shown in Figure 14, from which it has found that T0 = 0.0038 s, k = 4, τ0 = 0. Equation (18) indicates that the fault frequency has a good match with the characteristic frequency of the outer race fault as Table 1, which preliminarily verifies the effectiveness of the method:
Then, considering that T0 = 0.0038 s, k = 4, τ0 = 0, data in the time range [0, 0.0008] is segregated from the simulation signal as shown in Figure 15.
The result of the second parameter-tuning stochastic resonance is shown in Figure 16, ωs ≈ 3989.8 Hz.
The result of the least squares fitting is shown in Figure 17, from which we find A = 0.21 and Dc = 5.
Figure 18 is a section of data intercepted from Phase IV. Figure 19 is the morphology filtering of this data, and Figure 20 is the FFT processing of this data.
From Figure 20, we find that the proposed method has a good match with the frequency of the outer race fault f ≈ 263.2 Hz and the oscillation damping vibration frequency ωs ≈ 3989.8 Hz. The proposed method can predict bearing fault information much earlier than morphology filtering. Moreover, the amplitude of the impulsive signal can be further used to judge the severity of the fault of the rotating machine. Therefore, the method proposed in this study has good processing ability for weak impulsive signals and a specific practical application.
5. Conclusions
In this paper, a stochastic resonance (SR)-based method of recovering weak impulsive signals is developed for quantitative diagnosis of faults in rotating machinery. It has been shown in theory that weak impulsive signals fulfill the mechanism of SR, but the SR produces nonlinear distortion of the shape of the impulsive signal. To eliminate the distortion a moving least squares fitting method is induced to reconstruct the signal from the output of SR process. To verify the effectiveness of the proposed method, a contrastive analysis between the proposed method and the morphology filter is conducted based on simulation. Experiments are carried out on bearings with outer race faults to verify the proposed approach. The experimental results show that the background noise is effectively suppressed and the key features of impulsive signals are reconstructed with good degree of accuracy, which leads to an earlier diagnosis of faults in bearings undertaking a run-to failure test.
Acknowledgments
This work was supported by the Fundamental Research Funds for the Central Universities and dynamic performance detection technology for aircraft rolling bearings (No. 201101-03).
Author Contributions
The original idea was proposed by Kuosheng Jiang and Guanghua Xu. The further data analysis was realized by Kuosheng Jiang, Lin Liang, Tangfei Tao and F. Gu under the supervision of Guanghua Xu. Kuosheng Jiang wrote the manuscript, and all the authors participated in amending the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Wang, J.; Xu, G.H.; Zhang, Q.; Liang, L. Application of improved morphological filter to the extraction of impulsive signals. Mech. Syst. Signal Process. 2009, 23, 236–245. [Google Scholar]
- He, J.; Liu, Z. Underwater acoustic azimuth and elevation angle estimation using spatial invariance of two identically oriented vector hydrophones at unknown locations in impulsive noise. Digit. Signal Process. 2009, 19, 452–462. [Google Scholar]
- Seo, D.H.; Choi, J.W.; Kim, Y.H. Impulsive sound source localization using peak and RMS estimation of the time-domain beamformer output. Mech. Syst. Signal Process. 2014, 49, 95–105. [Google Scholar]
- Jeon, J.H.; Kim, Y.H. Localization of moving periodic impulsive source in a noisy environment. Mech. Syst. Signal Process. 2008, 22, 753–759. [Google Scholar]
- Nikolaou, N.G.; Antoniadis, I.A. Application of morphological operators as envelope extractors for impulsive-type periodic signals. Mech. Syst. Signal Process. 2003, 17, 1147–1162. [Google Scholar]
- Zhou, H.; Mao, K.Z. An impulsive noise color image filter using learning-based color morphological operations. Digit. Signal Process. 2008, 18, 406–421. [Google Scholar]
- Somasundaram, K.; Shanmugavadivu, P. Impulsive noise detection by second-order differential image and noise removal using adaptive nearest neighbourhood filter. AEU. Int. J. Electron. Commun. 2013, 62, 472–477. [Google Scholar]
- Lou, X.; Loparo, K.A. Oil analysis bearing fault diagnosis based on wavelet transform and fuzzy inference. Mech. Syst. Signal Process. 2004, 18, 1077–1095. [Google Scholar]
- Yu, D.; Cheng, J. Application of EMD method and Hilbert spectrum to the fault diagnosis of roller bearings. Mech. Syst. Signal Process. 2005, 19, 250–270. [Google Scholar]
- Freudinger, L.C.; Lind, R.; Brenner, M.J. Correlation filtering of modal dynamics using the Laplace wavelet. Proceedings of the 16th International Modal Analysis Conference, Santa Barbara, CA, USA, 2–5 February 1998; pp. 868–877.
- Li, H.F.; Xu, B.H. A new method to recover the signal obtained by stochastic resonance. Acta Mech. Sin. 2003, 35, 194–198. [Google Scholar]
- Lei, Y.G.; Han, D.; Lin, J.; He, Z. Planetary gearbox fault diagnosis using an adaptive stochastic resonance method. Mech. Syst. Signal Process. 2013, 38, 113–124. [Google Scholar]
- Huang, Q.; Liu, J.; Li, H. A Modified Adaptive Stochastic Resonance for Detecting Faint Signal in Sensors. Sensors 2007, 7, 157–165. [Google Scholar]
- He, Q.B.; Wang, J. Multiscale noise tuning of stochastic resonance for enhanced fault diagnosis in rotating machines. Mech. Mech. Syst. Signal Process. 2012, 28, 443–457. [Google Scholar]
- Li, Q.; Wang, T.Y. Research of adaptive stochastic resonance based on approximate entropy. Acta Phys. Sin. 2007, 56, 6803–6808. [Google Scholar]
- Jiang, K.S.; Xu, G.H.; Liang, L. A quantitative diagnosis method for rolling element bearing using signal complexity and morphology filtering. J. Vibroeng. 2012, 14, 1862–1875. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bearing Designation | Ball Numbers | Groove Section Size (cm) | Contact Angle | BPFI (Hz) | BPFO (Hz) | BSF (Hz) | FTF (Hz) |
|---|---|---|---|---|---|---|---|
| ZA-2155 of Rexnord | 16 | 0.841 | 2.815 | 296.9 | 263.4 | 139.9 | 29.55 |
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Jiang, K.; Xu, G.; Liang, L.; Tao, T.; Gu, F. The Recovery of Weak Impulsive Signals Based on Stochastic Resonance and Moving Least Squares Fitting. Sensors 2014, 14, 13692-13707. https://doi.org/10.3390/s140813692
Jiang K, Xu G, Liang L, Tao T, Gu F. The Recovery of Weak Impulsive Signals Based on Stochastic Resonance and Moving Least Squares Fitting. Sensors. 2014; 14(8):13692-13707. https://doi.org/10.3390/s140813692
Chicago/Turabian StyleJiang, Kuosheng, Guanghua Xu, Lin Liang, Tangfei Tao, and Fengshou Gu. 2014. "The Recovery of Weak Impulsive Signals Based on Stochastic Resonance and Moving Least Squares Fitting" Sensors 14, no. 8: 13692-13707. https://doi.org/10.3390/s140813692
APA StyleJiang, K., Xu, G., Liang, L., Tao, T., & Gu, F. (2014). The Recovery of Weak Impulsive Signals Based on Stochastic Resonance and Moving Least Squares Fitting. Sensors, 14(8), 13692-13707. https://doi.org/10.3390/s140813692