
A Review of LIDAR Radiometric Processing: From Ad Hoc Intensity Correction to Rigorous Radiometric Calibration



Abstract
:1. Introduction
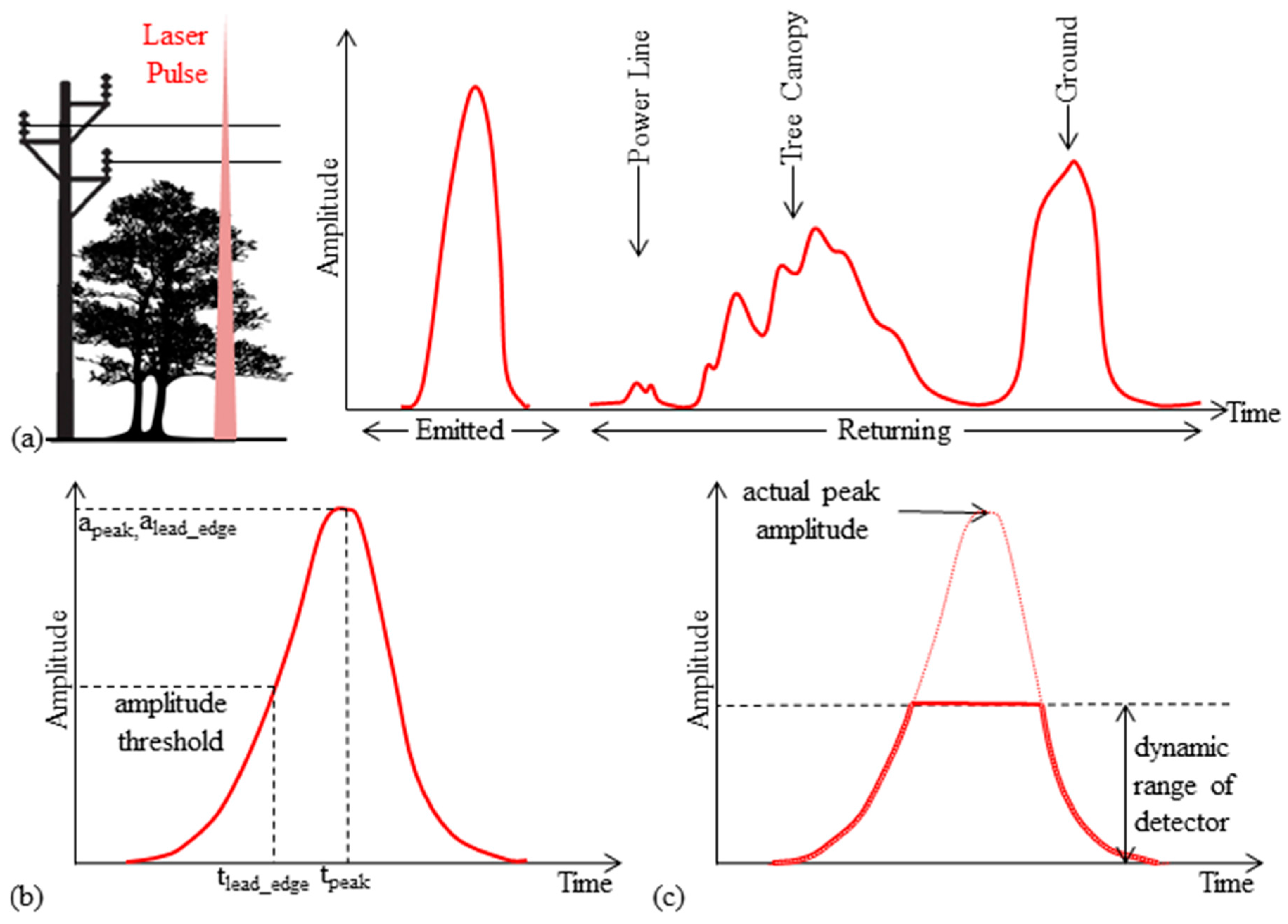
2. Basics of LIDAR Intensity Measurement


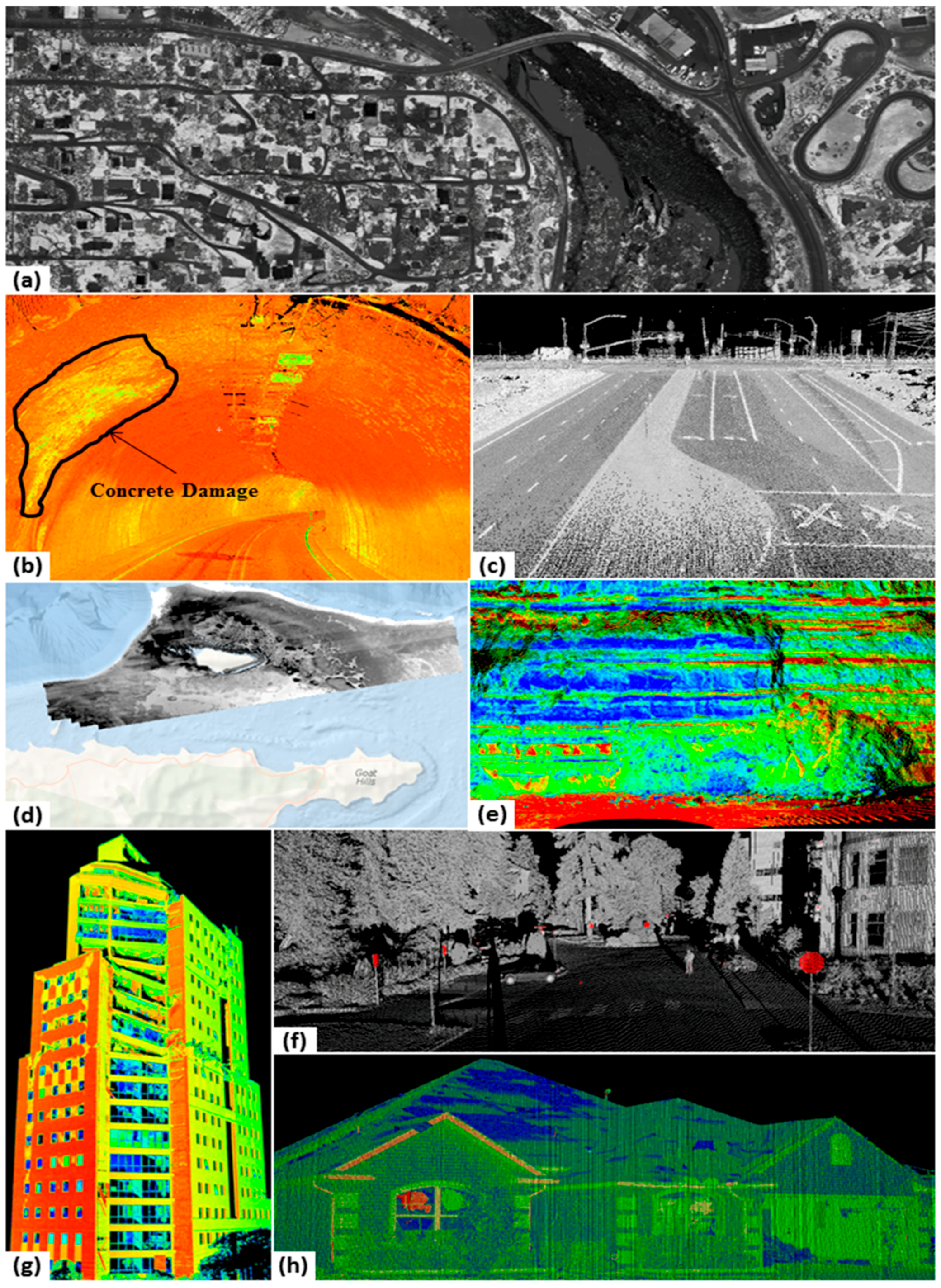
3. Applications of LIDAR Intensity

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Application | References |
|---|---|---|
| Cultural Heritage/Virtual Tourism | Analysis of historical paintings/artifacts Digital preservation | [21,22] |
| Land cover classification | Classification of urban surfaces | [2,3,7] |
| Detection and classification of buildings | [4,5] | |
| Classification of glacier surfaces | [6] | |
| Supplementing image-based land cover classifications | [8,9] | |
| Remote sensing data registration | Registration of multiple scans by identifying common features | [10,11,12,13,14] |
| integration of scans and images by identifying common features | [15,16,17,18,19,20] | |
| Sensing natural environments | Flood modeling and wetland hydrology | [23,24] |
| Tree classification, snag detection, and forest understory vegetation cover | [25,26,27,28,29,30] | |
| Identification of different rock and soil layers | [31] | |
| Lava flows aging | [32] | |
| Snow cover change detection | [33] | |
| Costal land cover mapping | [34] | |
| Bathymetry (using bathymetric LIDAR) | Benthic habitat mapping | [35,36,37,38,39] |
| Hydrodynamic and sedimentological properties | [40] | |
| Structural damage detection | Assessment of historic buildings | [41] |
| Crack detection of concrete structures | [42,43,44] | |
| Detection of bridge surface degradation | [45] | |
| Detection of wind-induced cladding damage | [46,47,48] | |
| Transportation asset management | Detection of road objects and features (e.g., markings, signs, manhole, culverts, etc.) | [49,50,51,52,53,54] |
| Pavement and tunnel damage detection | [55,56] | |
| Extraction of road profile | [57] |

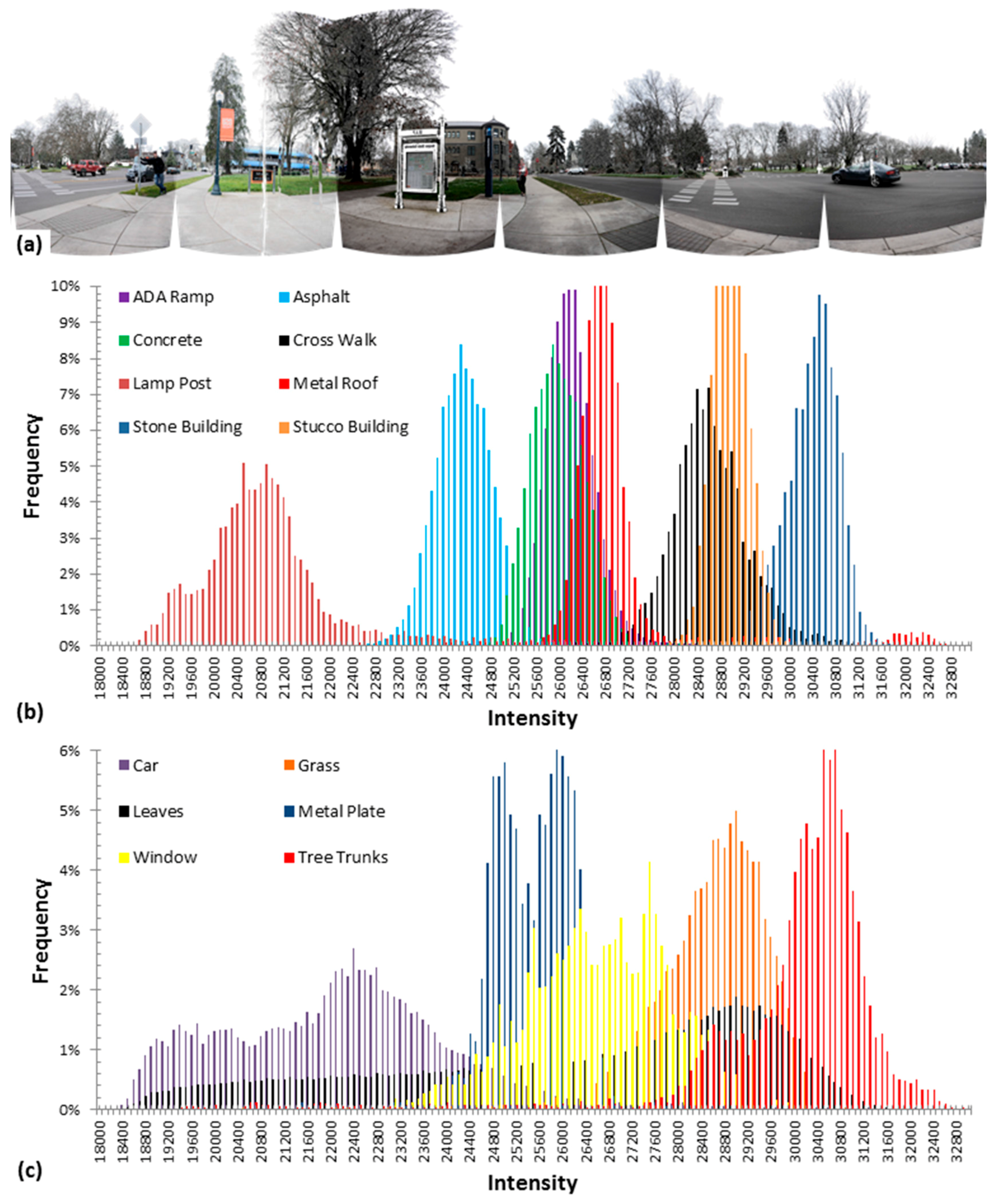
4. Effective Parameters Influencing Intensity Measurements
| Category | Factor | Description | Related References |
|---|---|---|---|
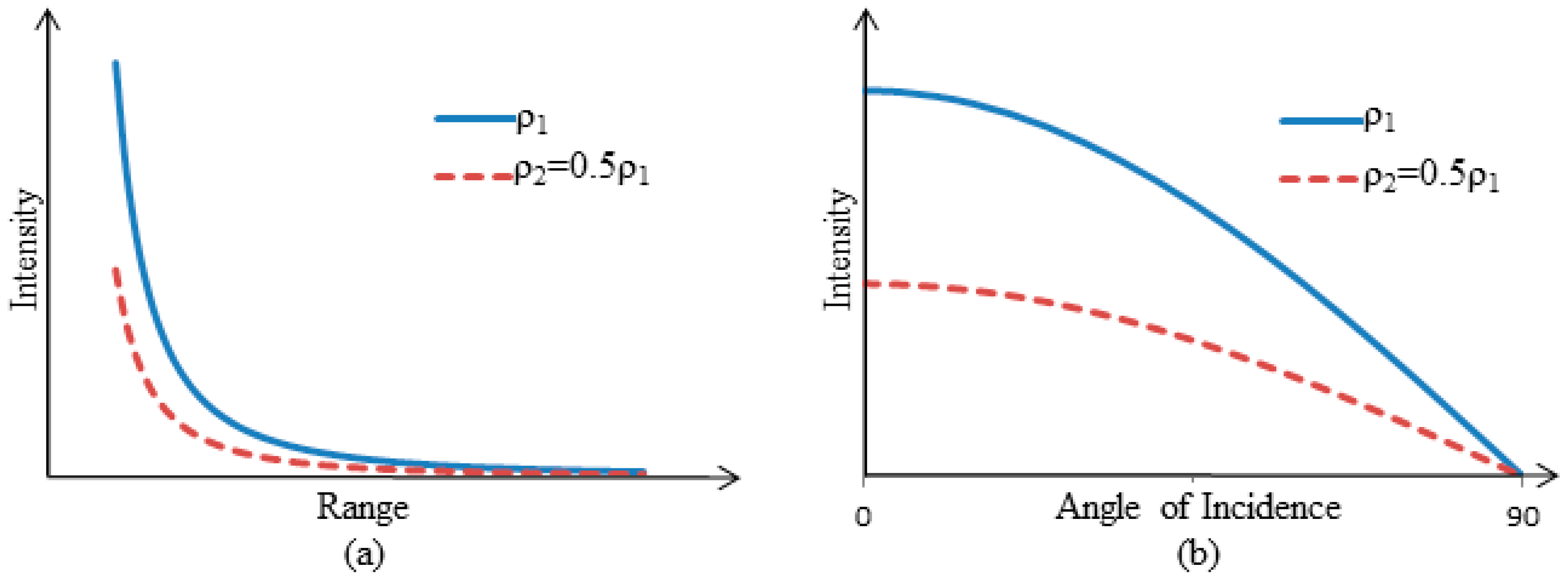
| Target Surface Characteristics | Reflectance (ρ) | By definition, surfaces of higher reflectance will reflect a greater portion of the incident laser radiation, thereby increasing the received signal power. In radiometric calibration, this is typically the parameter of interest. | [59,60,61,62,63,64,65] |
| Roughness (ɳ) | Surface roughness dictates the type of reflection (e.g., specular vs. diffuse) | [62,66,67] | |
| Acquisition Geometry | Range (R) | The emitted pulse energy decays as a function of range or distance traveled. | [27,58,63,64,65,68,69,70,71,72,73] |
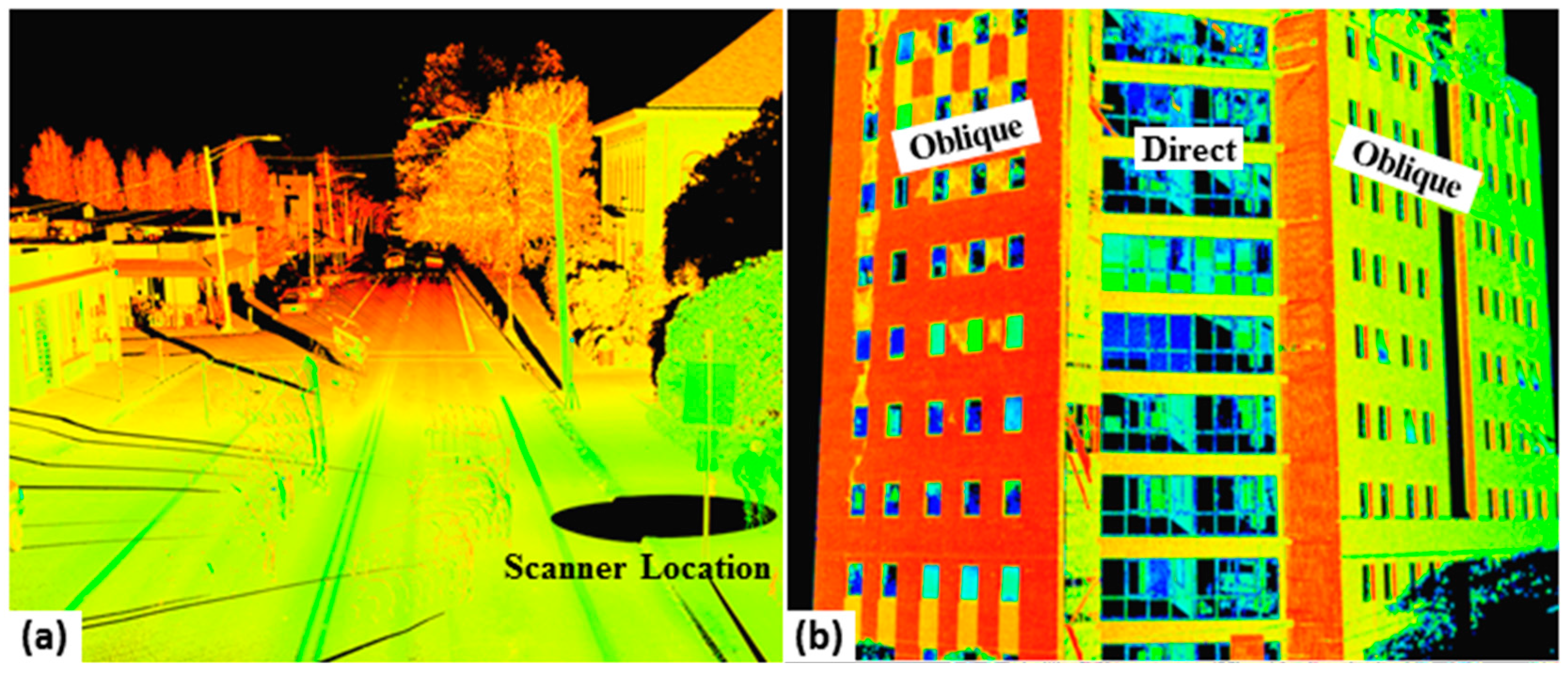
| Angle of Incidence (α) | Greater angles of incidence typically result in less of the incident laser energy being backscattered in the direction of the receiver, thereby reducing received optical power. Additionally, when the laser beam strikes a surface obliquely, it increases the backscattering cross section. | [58,62,63,64,65,66,68,69,70,71,72] | |
| Multiple Returns | When a single laser pulse reflects from objects, an attenuation correction can be applied to compensate for the energy split between objects. | [74,75,76] | |
| Instrumental Effects | Transmitted Energy (E) | The amount of energy backscattered from targets is related to the amount of energy transmitted with every pulse. Transmitted pulse energy is related to peak transmitted power (which varies with pulse repetition frequency in many systems) and transmit pulse width. | [59,61,65,77] |
| Intensity Bit Depth (*-bit) and Scaling | Different scanners use varying bit depth (e.g., 8-bit, 12-bit or 16-bit) when digitizing the return signal. Recorded digital numbers (DNs) are typically scaled to fill the available dynamic range. | [70,78] | |
| Amplifier for low reflective surfaces | Some scanners amplify the intensity values measured on low reflective surfaces. | [59,60,61,72] | |
| Automatic gain control (Ω) | Some systems (e.g., Leica ALS systems) employ automatic gain control (AGC), which increases the dynamic range that can be accommodated but can also result in discontinuities in the intensity signal, if not compensated. | [27,65,79] | |
| Brightness reducer for near distances | Some scanners reduce intensity values measured on close objects (e.g., less than 10 m distance). | [21,54,72] | |
| Aperture Size (Dr) | A larger aperture admits more light, increasing received signal strength. | [60] | |
| Environmental Effects | Atmospheric Transmittance (T) or (ηatm) | Radiant energy attenuates in propagating through the atmosphere, as a function of humidity, temperature pressure and other variables. | [58,65,69,70] |
| Wetness | Wet surfaces also absorb more energy from the pulse (particularly at the 1.5 micron wavelength used in some systems), resulting in weaker returns. | [61,69] |


4.1. Target Surface Characteristics
4.2. Data Acquisition Geometry
4.3. Instrumental Effects
4.4. Environmental Effects
4.5. Effective Factors in Bathymetric LIDAR

| Category | Factor | Description | Related References |
|---|---|---|---|
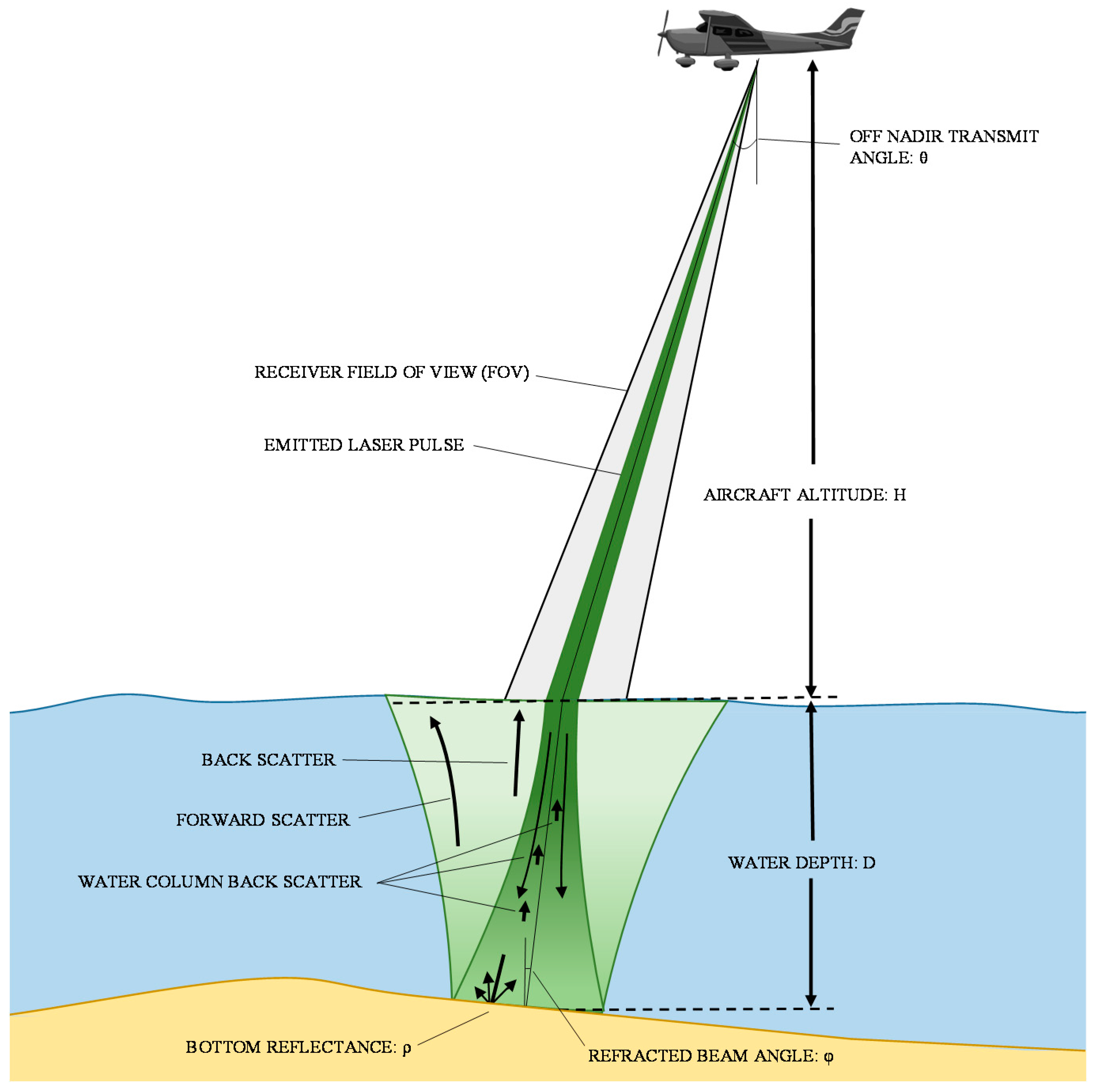
| Acquisition Geometry | Water Depth (D) | In bathymetric LIDAR, pulse power decays exponentially with the product of water depth and the diffuse attenuation coefficient. | [35,84] |
| Off nadir transmit angle (θ) | Affects the signal return due to pulse stretching and retro-reflectance of the surface material. | [83,84] | |
| Receiver field of view loss factor (Fp) | Loss factor due to a receiver FOV is insufficient to accommodate the spreading of the pulse in the water column. | [82,87] | |
| Aircraft altitude (H), refracted beam angle (Φ), effective area of receiver optics (Ar) | Other acquisition geometry factors which have an effect on the return power as shown in the bathymetric LIDAR equation (Equation (4)). | [82,85] | |
| Diffuse Attenuation Coefficient (K) | Light traveling through the water column is exponentially attenuated, due to absorption and scattering by particles in the water. | [83,84,86] | |
| Pulse stretching factor (n) | Stretching of the pulse due to acquisition geometry and scattering properties of the water. | [84,85] |
5. Basic Theory
5.1. LIDAR Range Equation
5.2. Bathymetric LIDAR Equation
6. Processing Methods
- Level 0:
- No modification (raw intensity): These are the basic intensity values directly provided by the manufacturer or vendor in their native storage format. They are typically scaled to values of 0–1 (floating point), 0–255 (8-bit integer), or 0–65,535 (16-bit integer), depending on the manufacturer. However, the processes used for scaling the sensor voltages and any adjustments applied are often unknown. Similar results can be obtained for the same scanner model by the same manufacturer; however, there typically is no direct agreement or relationship between values provided by different systems or manufacturers. In this paper, we refer to this as intensity, generically.
- Level 1:
- Intensity correction: In this process an adjustment is made to the intensity values to reduce or ideally eliminate variation caused by one or more effective parameters (e.g., range, angle of incidence, etc.). This process is performed by either a theoretical or empirical correction model. Intensity correction ultimately can result in pseudo-reflectance values.
- Level 2:
- Intensity normalization: In this process an intensity image is normalized through scaling to adjust the contrast and/or a shift to adjust the overall “brightness” to improve matching with a neighboring tile or overlapping strip (i.e., a histogram matching or normalization).
- Level 3:
- Rigorous radiometric correction and calibration: In this meticulous process, the intensity values from the LIDAR system are first evaluated on targets with known reflectance, resulting in the determination of calibration constants for the sensor. The calibration constants are then applied to future data that are collected with the system including additional Level 1 intensity corrections to account for any deviations in parameters (e.g., range, angle of incidence). When completed rigorously, this process results in “true” reflectance information. Hence, when radiometric calibration has been applied, consistent data can be obtained from different systems, operated with different parameters settings, and in different conditions. In this paper, we refer to these as reflectance values.
| Reference | Scanner | Level | Targets | Parameters | Theoretical Model | Empirical Model |
|---|---|---|---|---|---|---|
| Luzum et al. [94] | (ALS) Optech ALTM 1233 | 1 | n/a | range (R) | n/a | |
| Coren & Sterzai [68] | (ALS) Optech ALTM3033 | 1 | homogenous surface (asphalt road) | range (R)angle of incidence (α) atm. attenuation coeff. (a) | ||
| Starek et al. [73] | (ALS) Optech ALTM 1233 | 1 | n/a | range (R) | n/a | |
| Hofle & Pfeifer [70] | (ALS) Optech ALTM 3100 | 1 | homogenous surface (asphalt road) | range (R)angle of incidence (α) atm. attenuation coeff. (a) transmitted energy (ET) | | |
| Jutzi and Gross [71] | (ALS) RIEGL LMS—Q560 | 1 | homogenous surface (roof planes) | range (R)angle of incidence (α) atm. attenuation coeff. (a) | n/a | |
| Korpela et al. [27] | (ALS) Optech ALTM3100Leica ALS50 | 1 | homogenous surface | range (R) automatic gain control (Gc) | n/a | |
| Vain et al. [95] | (ALS) Leica ALS50-II | 1 | brightness calibration targets (tarps) | automatic gain control (Gc) | n/a | |
| Habib et al. [96] | (ALS) Leica ALS50 | 1 | n/a | range (R) angle of incidence (α) | n/a | |
| Yan et al. [58] | (ALS) Leica ALS50 | 1 | n/a | range (R) angle of incidence (α) atm. attenuation coeff. (a) | n/a | |
| Ding et al. [69] | (ALS) Leica ALS50-I | 1 | overlapping scan areas | range (R) angle of incidence (α) atm. attenuation coeff. (a) | and Phong model | |
| Ahokas et al. [77] | (ALS) Optech ALTM 3100 | 3 | brightness calibration targets (tarps) | range (R) atm. attenuation coeff. (a) transmitted energy (ET) reflectance (ρ) | ||
| Kaasalainen et al. [61] | (ALS) Optech ALTM 3100 Topeye MK Leica ALS50 | 3 | sand and gravel | range (R) angle of incidence (α) total atmosphere transmittance (T) pulse energy (ET) | method described by Vain et al. (2009) | where: Iref is reference Intensity measured at the same range of targets |
| Vain et al. [65] | (ALS) Above scanners + Optech ALTM 2033 | 3 | natural & commercial targets, brightness calibration targets (tarps) | range (R)angle of incidence (α) total atmosphere transmittance (T) pulse energy (ET) | ||
| Briese et al. [97] | (ALS) RIEGL VQ820-G LMS-Q680i VQ-580 | 3 | asphalt road, stone pavement | range (R) angle of incidence (α) detected power (Pr) empirical calibration constant (Ccal) reflectance (ρ) | ||
| Errington et al. [98] | (TLS) 3DLS-K2 | 1 | overlapping scan areas | range (R) angle of incidence (α) pseudo-reflectance (ρ) | n/a | The separation model proposed by Pfeifer et al. (2008) |
| Fang et al. [21] | (TLS) Z + F Imager5006i | 1 | White paper targets | range (R) angle of incidence (α) near-distance effect (n(R)) | n/a | |
| Pfeifer et al. [63,64] | (TLS) Riegl LMS-Z420i & Optech ILRIS 3D | 3 | brightness calibration targets (Spectralon ) | range (R) angle of incidence (α) reflectance (ρ) | n/a | (1) (2) where: g1: linear, g2: xA, g3: cubic polynomial, g4: vector valued |
| Kaasalainen et al. [59,60] | (TLS) FARO LS HE80 | 3 | brightness calibration targets (Spectralon) | range (R) reflectance (ρ) | n/a | where: Iref is 99% Spectralon ® reference Intensity measured at the same range of targets |
| Kaasalainen et al. [59] | (TLS) Leica HDS6000 | 3 | brightness calibration targets (Spectralon) gravel | range (R) | n/a | where: Iref is 99% Spectralon ® reference Intensity measured at the same range of targets |
| Reference | Scanner | Level | Targets | Parameters | Theoretical Model | Empirical Model |
|---|---|---|---|---|---|---|
| Tuell et al. [86] | (ALB) Optech SHOALS | 3 | homogeneous surface (wall covered in painted tiles) | See [86] for derivations of parameters applied. | See Equation (28) in [86] for final model | n/a |
| Collin et al. [35] | (ALB) Optech SHOALS | 1 | n/a | received power (PR) constant combining loss factors (W) transmitted power (PT) benthic reflectance (ρ) diffuse attenuation coeff. (K) depth (D) | Fourier transform with low-pass filtering, then a nonlinear least squares regression correction for depth. | |
| Wang & Philpot [84] | (ALB) Optech SHOALS | 1 | n/a | Bathymetric angle of incidence (θi) Derived coefficients (C) | n/a | Correction for bottom reflectance: Correction for pulse stretching: |
6.1. Theoretical Correction Methods

6.2. Empirical Correction Methods
6.3. Bathymetric LIDAR Correction Methods
6.4. Intensity Normalization Procedures
6.5. Radiometric Calibration with Reference Targets
7. Summary of Challenges and Future Direction
- Develop relationships and unifying research for consistent intensity values/measures between LIDAR systems designed for platforms such as airborne, mobile, and terrestrial. Currently much research between these systems remains distinct; however, there are many similarities between these systems.
- Evaluate and account for the influences of surface characteristics such as roughness or wetness.
- Clarify what level of intensity processing is needed (or useful) for specific applications. For some applications, a Level 0 intensity value may prove sufficient. However, for advanced classifications (e.g., determination of plant species), Level 3 calibration may be required.
- Variance of intensity across wavelengths. The wavelength of LIDAR systems can also vary significantly. Even if a “true” reflectance is calculated from the intensity values, it is important to consider that such a reflectance only applies at the specific wavelength of the system. Many of the parameters described in this review are a function of the wavelength used. Hence, we recommend for future studies that the wavelength be included as a subscript of presented reflectance values (e.g., ρ532) obtained via LIDAR.
Acknowledgments
Conflicts of Interest
References
- Shan, J.; Toth, C.K. Topographic Laser Ranging and Scanning: Principles and Processing; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Song, J.H.; Han, S.H.; Yu, K.Y.; Kim, Y.I. Assessing the possibility of land-cover classification using LIDAR intensity data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2002, 34, 259–262. [Google Scholar]
- Charaniya, A.P.; Manduchi, R.; Lodha, S.K. Supervised parametric classification of aerial LIDAR data. In Proceedings of the IEEE 2004 Conference on Computer Vision and Pattern Recognition Workshop, Washington, DC, USA, 27 June–2 July 2004.
- Brennan, R.; Webster, T.L. Object-oriented land cover classification of LIDAR-derived surfaces. Can. J. Remote Sens. 2006, 32, 162–172. [Google Scholar] [CrossRef]
- Matikainen, L.; Hyyppä, J.; Hyyppä, H. Automatic detection of buildings from laser scanner data for map updating. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2003, 34, 218–224. [Google Scholar]
- Arnold, N.S.; Rees, W.G.; Devereux, B.J.; Amable, G.S. Evaluating the potential of high-resolution airborne LIDAR data in glaciology. Int. J. Remote Sens. 2006, 27, 1233–1251. [Google Scholar] [CrossRef]
- Im, J.; Jensen, J.R.; Hodgson, M.E. Object-based land cover classification using high-posting-density LIDAR data. GIScience Remote Sens. 2008, 45, 209–228. [Google Scholar] [CrossRef]
- Zhou, W.; Huang, G.; Troy, A.; Cadenasso, M.L. Object-based land cover classification of shaded areas in high spatial resolution imagery of urban areas: A comparison study. Remote Sens. Environ. 2009, 113, 1769–1777. [Google Scholar] [CrossRef]
- MacFaden, S.W.; O’Neil-Dunne, J.P.; Royar, A.R.; Lu, J.W.; Rundle, A.G. High-resolution tree canopy mapping for New York City using LIDAR and object-based image analysis. J. Appl. Remote Sens. 2012, 6. [Google Scholar] [CrossRef]
- Alba, M.; Barazzetti, L.; Scaioni, M.; Remondino, F. Automatic registration of multiple laser scans using panoramic RGB and intensity images. In Proceedings of the ISPRS Workshop Laser Scanning 2011, Calgary, AL, Canada, 29–31 August 2011.
- Barnea, S.; Filin, S. Geometry-image-intensity combined features for registration of terrestrial laser scans. In Photogrammetry and Computer Vision, ISPRS Commission III; ISPRS: Aint-Mandé, France, 2010; Volume 2, pp. 145–150. [Google Scholar]
- Boehm, J.; Becker, S. Automatic Marker-free Registration of Terrestrial Laser Scans using Reflectance Features. In Proceedings of the 8th Conference Optical 3-D Measurement Techniques, Zurich, Switzerland, 9–12 July 2007; Volume I, pp. 338–343.
- Kang, Z.; Li, J.; Zhang, L.; Zhao, Q.; Zlatanova, S. Automatic registration of terrestrial laser scanning point clouds using panoramic reflectance images. Sensors 2009, 9, 2621–2646. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Brenner, C. Point based registration of terrestrial laser data using intensity and geometry features. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 583–590. [Google Scholar]
- Abedinia, A.; Hahnb, M.; Samadzadegan, F. An investigation into the registration of LIDAR intensity data and aerial images using the SIFT approach. In Proceedings of XXI ISPRS Congress, Beijing, China, 3–11 July 2008.
- González-Aguilera, D.; Rodríguez-Gonzálvez, P.; Hernández-López, D.; Lerma, J.L. A robust and hierarchical approach for the automatic co-registration of intensity and visible images. Opt. Laser Technol. 2012, 44, 1915–1923. [Google Scholar] [CrossRef]
- González-Aguilera, D.; Rodríguez-Gonzálvez, P.; Gómez-Lahoz, J. An automatic procedure for co-registration of terrestrial laser scanners and digital cameras. ISPRS J. Photogramm. Remote Sens. 2009, 64, 308–316. [Google Scholar] [CrossRef]
- Parmehr, E.G.; Fraser, C.S.; Zhang, C.; Leach, J. Automatic registration of optical imagery with 3D LIDAR data using statistical similarity. ISPRS J. Photogramm. Remote Sens. 2014, 88, 28–40. [Google Scholar] [CrossRef]
- Wong, A.; Orchard, J. Efficient FFT-accelerated approach to invariant optical–LIDAR registration. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3917–3925. [Google Scholar] [CrossRef]
- Han, J.Y.; Perng, N.H.; Lin, Y. Feature conjugation for intensity-coded LIDAR point clouds. J. Surv. Eng. 2013, 139, 135–142. [Google Scholar] [CrossRef]
- Fang, W.; Huang, X.; Zhang, F.; Li, D. Intensity Correction of Terrestrial Laser Scanning Data by Estimating Laser Transmission Function. IEEE Trans. Geosci. Remote Sens. 2015, 53, 942–951. [Google Scholar] [CrossRef]
- Olsen, M.J.; Chen, Z.; Hutchinson, T.; Kuester, F. Optical techniques for multiscale damage assessment. Geomat. Nat. Hazards Risk 2013, 4, 49–70. [Google Scholar] [CrossRef]
- Antonarakis, A.S.; Richards, K.S.; Brasington, J. Object-based land cover classification using airborne LIDAR. Remote Sens. Environ. 2008, 112, 2988–2998. [Google Scholar] [CrossRef]
- Lang, M.W.; McCarty, G.W. LIDAR intensity for improved detection of inundation below the forest canopy. Wetlands 2009, 29, 1166–1178. [Google Scholar] [CrossRef]
- Donoghue, D.N.; Watt, P.J.; Cox, N.J.; Wilson, J. Remote sensing of species mixtures in conifer plantations using LIDAR height and intensity data. Remote Sens. Environ. 2007, 110, 509–522. [Google Scholar] [CrossRef]
- Gatziolis, D. Dynamic range-based intensity normalization for airborne, discrete return LIDAR data of forest canopies. Photogramm. Eng. Remote Sens. 2011, 77, 251–259. [Google Scholar] [CrossRef]
- Korpela, I.; Ørka, H.O.; Hyyppä, J.; Heikkinen, V.; Tokola, T. Range and AGC normalization in airborne discrete-return LIDAR intensity data for forest canopies. ISPRS J. Photogramm. Remote Sens. 2010, 65, 369–379. [Google Scholar] [CrossRef]
- Wing, B.M.; Ritchie, M.W.; Boston, K.; Cohen, W.B.; Olsen, M.J. Individual snag detection using neighborhood attribute filtered airborne LIDAR data. Remote Sens. Environ. 2015, 163, 165–179. [Google Scholar] [CrossRef]
- Wing, B.M.; Ritchie, M.W.; Boston, K.; Cohen, W.B.; Gitelman, A.; Olsen, M.J. Prediction of understory vegetation cover with airborne LIDAR in an interior ponderosa pine forest. Remote Sens. Environ. 2012, 124, 730–741. [Google Scholar] [CrossRef]
- Barnea, S.; Filin, S. Extraction of objects from terrestrial laser scans by integrating geometry image and intensity data with demonstration on trees. Remote Sens. 2012, 4, 88–110. [Google Scholar] [CrossRef]
- Burton, D.; Dunlap, D.B.; Wood, L.J.; Flaig, P.P. LIDAR intensity as a remote sensor of rock properties. J. Sediment. Res. 2011, 81, 339–347. [Google Scholar] [CrossRef]
- Mazzarini, F.; Pareschi, M.T.; Favalli, M.; Isola, I.; Tarquini, S.; Boschi, E. Lava flow identification and aging by means of LIDAR intensity: Mount Etna case. J. Geophys. Res. Solid Earth 2007, 112, 1978–2012. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Kaartinen, H.; Kukko, A. Snow cover change detection with laser scanning range and brightness measurements. EARSeL eProc. 2008, 7, 133–141. [Google Scholar]
- Chust, G.; Galparsoro, I.; Borja, A.; Franco, J.; Uriarte, A. Coastal and estuarine habitat mapping, using LIDAR height and intensity and multi-spectral imagery. Estuar. Coast. Shelf Sci. 2008, 78, 633–643. [Google Scholar] [CrossRef]
- Collin, A.; Archambault, P.; Long, B. Mapping the shallow water seabed habitat with the SHOALS. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2947–2955. [Google Scholar] [CrossRef]
- Macon, C.; Wozencraft, J.; Park, J.Y.; Tuell, G. Seafloor and land cover classification through airborne LIDAR and hyperspectral data fusion. In Proceedings of the 2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008; Volume 2.
- Narayanan, R.; Kim, H.B.; Sohn, G. Classification of SHOALS 3000 bathymetric LIDAR signals using decision tree and ensemble techniques. In Proceedings of the 2009 IEEE Toronto International Conference Science and Technology for Humanity (TIC-STH), Toronto, ON, Canada, 26–27 September 2009; pp. 462–467.
- Tuell, G.; Park, J.Y.; Aitken, J.; Ramnath, V.; Feygels, V.; Guenther, G.; Kopilevich, Y. SHOALS-enabled 3D Benthic Mapping. Available online: http://proceedings.spiedigitallibrary.org/proceeding.aspx?articleid=864434 (accessed on 5 November 2015).
- Tuell, G.H.; Ramnath, V.; Park, J.Y.; Feygels, V.; Aitken, J.; Kopelivich, Y. Fusion of SHOALS bathymetric LIDAR and passive spectral data for shallow water rapid environmental assessment. In Proceedings of the Oceans 2005-Europe, Brest, France, 20–23 June 2005; Volume 2, pp. 1046–1051.
- Long, B.; Aucoin, F.; Montreuil, S.; Robitaille, V.; Xhardé, R. Airborne LIDAR bathymetry applied to coastal hydrodynamic processes. In Proceedings of International Conference on Coastal Engineering, Shanghai, China, 30 June–5 July 2010.
- Armesto-González, J.; Riveiro-Rodríguez, B.; González-Aguilera, D.; Rivas-Brea, M.T. Terrestrial laser scanning intensity data applied to damage detection for historical buildings. J. Archaeol. Sci. 2010, 37, 3037–3047. [Google Scholar] [CrossRef]
- Guldur, B.; Hajjar, J.F. Damage Detection on Structures Using Texture Mapped Laser Point Clouds. In Proceedings of Structures Congress, Boston, MA, USA, 3–5 April 2014.
- Olsen, M.J.; Cheung, K.F.; Yamazaki, Y.; Butcher, S.M.; Garlock, M.; Yim, S.C.; Young, Y.L. Damage Assessment of the 2010 Chile Earthquake and Tsunami using ground-based LIDAR. Earthq. Spectra 2012, 28, S179–S197. [Google Scholar] [CrossRef]
- Olsen, M.J.; Kuester, F.; Chang, B.J.; Hutchinson, T.C. Terrestrial laser scanning-based structural damage assessment. J. Comput. Civil Eng. 2009, 24, 264–272. [Google Scholar] [CrossRef]
- Masiero, A.; Guarnieri, A.; Pirotti, F.; Vettore, A. Semi-Automated Detection of Surface Degradation on Bridges Based on a Level Set Method. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 1, 15–21. [Google Scholar] [CrossRef]
- Kashani, A.G.; Olsen, M.; Graettinger, A.J. Laser Scanning Intensity Analysis for Automated Building Wind Damage Detection. In Proceedings of International Workshop on Computing in Civil Engineering, Austin, TX, USA, 21–23 June 2015.
- Kashani, A.G.; Graettinger, A.J. Cluster-Based Roof Covering Damage Detection in Ground-Based LIDAR Data. Autom. Constr. 2015, 58, 19–27. [Google Scholar] [CrossRef]
- Kashani, A.G. Automated Assessment of Tornado-Induced Building Damage Based on Terrestrial Laser Scanning. Ph.D. Thesis, University of Alabama, Tuscaloosa, AL, USA, September 2014. [Google Scholar]
- Guan, H.; Yu, Y.; Li, J.; Liu, P.; Zhao, H.; Wang, C. Automated extraction of manhole covers using mobile LIDAR data. Remote Sens. Lett. 2014, 5, 1042–1050. [Google Scholar] [CrossRef]
- Guan, H.; Li, J.; Yu, Y.; Wang, C.; Chapman, M.; Yang, B. Using mobile laser scanning data for automated extraction of road markings. ISPRS J. Photogramm. Remote Sens. 2014, 87, 93–107. [Google Scholar] [CrossRef]
- Yang, B.; Fang, L.; Li, Q.; Li, J. Automated extraction of road markings from mobile LIDAR point clouds. Photogramm. Eng. Remote Sens. 2012, 78, 331–338. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppa, J. Geometry and intensity based culvert detection in mobile laser scanning point clouds. J. Appl. Remote Sens. 2010, 4. [Google Scholar] [CrossRef]
- Williams, K.; Olsen, M.J.; Roe, G.V.; Glennie, C. Synthesis of transportation applications of mobile LIDAR. Remote Sens. 2013, 5, 4652–4692. [Google Scholar] [CrossRef]
- Teo, T.A.; Yu, H.L. Empirical Radiometric Normalization of Road Points from Terrestrial Mobile LIDAR System. Remote Sens. 2015, 7, 6336–6357. [Google Scholar] [CrossRef]
- Johnson, W.H.; Johnson, A.M. Operational considerations for terrestrial laser scanner use in highway construction applications. J. Surv. Eng. 2012, 138, 214–222. [Google Scholar] [CrossRef]
- Tsai, Y.C.J.; Li, F. Critical assessment of detecting asphalt pavement cracks under different lighting and low intensity contrast conditions using emerging 3D laser technology. J. Transp. Eng. 2012, 138, 649–656. [Google Scholar] [CrossRef]
- Chin, A.; Olsen, M.J. Evaluation of Technologies for Road Profile Capture, Analysis, and Evaluation. J. Surv. Eng. 2014, 141. [Google Scholar] [CrossRef]
- Yan, W.Y.; Shaker, A.; Habib, A.; Kersting, A.P. Improving classification accuracy of airborne LIDAR intensity data by geometric calibration and radiometric correction. ISPRS J. Photogramm. Remote Sens. 2012, 67, 35–44. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Krooks, A.; Kukko, A.; Kaartinen, H. Radiometric calibration of terrestrial laser scanners with external reference targets. Remote Sens. 2009, 1, 144–158. [Google Scholar] [CrossRef]
- Kaasalainen, M.; Kaasalainen, S. Aperture size effects on backscatter intensity measurements in Earth and space remote sensing. JOSA A 2008, 25, 1142–1146. [Google Scholar] [CrossRef] [PubMed]
- Kaasalainen, S.; Hyyppä, H.; Kukko, A.; Litkey, P.; Ahokas, E.; Hyyppä, J.; Pyysalo, U. Radiometric calibration of LIDAR intensity with commercially available reference targets. IEEE Trans. Geosci. Remote Sens. 2009, 47, 588–598. [Google Scholar] [CrossRef]
- Kukko, A.; Kaasalainen, S.; Litkey, P. Effect of incidence angle on laser scanner intensity and surface data. Appl. Opt. 2008, 47, 986–992. [Google Scholar] [CrossRef] [PubMed]
- Pfeifer, N.; Dorninger, P.; Haring, A.; Fan, H. Investigating terrestrial laser scanning intensity data: Quality and functional relations. In Proceedings of the 8th Conference on Optical 3-D Measurement Techniques, Zurich, Switzerland, 9–12 July 2007; pp. 328–337.
- Pfeifer, N.; Höfle, B.; Briese, C.; Rutzinger, M.; Haring, A. Analysis of the backscattered energy in terrestrial laser scanning data. Int. Arch. Photogramm. Remote Sens. 2008, 37, 1045–1052. [Google Scholar]
- Vain, A.; Kaasalainen, S.; Pyysalo, U.; Krooks, A.; Litkey, P. Use of naturally available reference targets to calibrate airborne laser scanning intensity data. Sensors 2009, 9, 2780–2796. [Google Scholar] [CrossRef] [PubMed]
- Krooks, A.; Kaasalainen, S.; Hakala, T.; Nevalainen, O. Correction of intensity incidence angle effect in terrestrial laser scanning. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 2, 145–150. [Google Scholar] [CrossRef]
- Pesci, A.; Teza, G. Effects of surface irregularities on intensity data from laser scanning: An experimental approach. Ann. Geophys. 2008, 51, 839–848. [Google Scholar]
- Coren, F.; Sterzai, P. Radiometric correction in laser scanning. Int. J. Remote Sens. 2006, 27, 3097–3104. [Google Scholar] [CrossRef]
- Ding, Q.; Chen, W.; King, B.; Liu, Y.; Liu, G. Combination of overlap-driven adjustment and Phong model for LIDAR intensity correction. ISPRS J. Photogramm. Remote Sens. 2013, 75, 40–47. [Google Scholar] [CrossRef]
- Hofle, B.; Pfeifer, N. Correction of laser scanning intensity data: Data and model-driven approaches. ISPRS J. Photogramm. Remote Sens. 2007, 62, 415–433. [Google Scholar] [CrossRef]
- Jutzi, B.; Gross, H. Normalization of LIDAR intensity data based on range and surface incidence angle. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2009, 38, 213–218. [Google Scholar]
- Kaasalainen, S.; Jaakkola, A.; Kaasalainen, M.; Krooks, A.; Kukko, A. Analysis of incidence angle and distance effects on terrestrial laser scanner intensity: Search for correction methods. Remote Sens. 2011, 3, 2207–2221. [Google Scholar] [CrossRef]
- Starek, M.; Luzum, B.; Kumar, R.; Slatton, K.C. Normalizing LIDAR Intensities; GEM Center Report No. Rep_2006-12-001; University of Florida: Gainesville, FL, USA, 2006. [Google Scholar]
- Richter, K.; Blaskow, R.; Stelling, N.; Maas, H.G. Reference Value Provision Schemes for Attenuation Correction of Full-Waveform Airborne Laser Scanner Data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 1, 65–72. [Google Scholar] [CrossRef]
- Richter, K.; Stelling, N.; Maas, H.G. Correcting attenuation effects caused by interactions in the forest canopy in full-waveform airborne laser scanner data. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 1, 273–280. [Google Scholar] [CrossRef]
- Romanczyk, P.; van Aardt, J.A.; Cawse-Nicholson, K.; Kelbe, D.; Strahler, A.H.; Schaaf, C.; Ramond, T. Quantifying the attenuation due to geometry interactions in waveform LIDAR signals. In Proceedings of the American Geophysical Union, Fall Meeting 2013, San Francisco, CA, USA, 9–13 December 2013.
- Ahokas, E.; Kaasalainen, S.; Hyyppä, J.; Suomalainen, J. Calibration of the Optech ALTM 3100 laser scanner intensity data using brightness targets. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 34, 3–6. [Google Scholar]
- LAS Extrabytes Implementation in RIEGL Software Whitepaper. Available online: http://www.riegl.com/uploads/tx_pxpriegldownloads/Whitepaper_-_LAS_extrabytes_implementation_in_Riegl_software_01.pdf (accessed on 5 November 2015).
- Yan, W.Y.; Shaker, A. Radiometric Correction and Normalization of Airborne LIDAR Intensity Data for Improving Land-Cover Classification. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7658–7673. [Google Scholar] [CrossRef]
- Lichti, D.; Gordon, S.J.; Tipdecho, T. Error models and propagation in directly georeferenced terrestrial laser scanner networks. J. Surv. Eng. 2005, 131, 135–142. [Google Scholar] [CrossRef]
- Blaskow, R.; Schneider, D. Analysis and correction of the dependency between laser scanner intensity values and range. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Riva del Garda, Italy, 23–25 June 2014.
- Guenther, G.C. Airborne LIDAR Bathymetry. In Digital Elevation Model Technologies and Applications: The Dem User’s Manual, 2nd ed.; Maune, D.F., Ed.; American Society for Photogrammetry and Remote Sensing: Bethesda, MD, USA, 2007; pp. 253–320. [Google Scholar]
- Kopilevich, Y.I.; Feygals, V.I.; Tuell, G.H.; Surkov, A. Measurement of ocean water optical properties and seafloor reflectance with Scanning Hydrographic Operational Airborne LIDAR Survey (SHOALS): I. Theoretical Background. In Optics & Photonics 2005; International Society for Optics and Photonics: San Diego, CA, USA, 2005; pp. 58850D-1–58850D-9. [Google Scholar]
- Wang, C.K.; Philpot, W.D. Using airborne bathymetric LIDAR to detect bottom type variation in shallow waters. Remote Sens. Environ. 2007, 106, 123–135. [Google Scholar] [CrossRef]
- Tuell, G.H.; Park, J.Y. Use of SHOALS bottom reflectance images to constrain the inversion of a hyperspectral radiative transfer model. In Defense and Security; International Society for Optics and Photonics: San Diego, CA, USA, 2004; pp. 185–193. [Google Scholar]
- Tuell, G.H.; Feygels, V.; Kopilevich, Y.; Weidemann, A.D.; Cunningham, A.G.; Mani, R.; Aitken, J. Measurement of ocean water optical properties and seafloor reflectance with Scanning Hydrographic Operational Airborne LIDAR Survey (SHOALS): II. Practical results and comparison with independent data. In Optics & Photonics 2005; International Society for Optics and Photonics: San Diego, CA, USA, 2005; pp. 58850E-1–58850E-13. [Google Scholar]
- Tuell, G.; Carr, D. New Procedure for Estimating Field-of-View Loss in Bathymetric LIDAR. In Imaging Systems and Applications; Optical Society of America: Arlington, VA, USA, 2013. [Google Scholar]
- Jelalian, A.V. Laser Radar Systems; Artech House: Norwood, MA, USA, 1992. [Google Scholar]
- Baltsavias, E.P. Airborne laser scanning: Basic relations and formulas. ISPRS J. Photogramm. Remote Sens. 1999, 54, 199–214. [Google Scholar] [CrossRef]
- Wagner, W.; Hyyppä, J.; Ullrich, A.; Lehner, H.; Briese, C.; Kaasalainen, S. Radiometric calibration of full-waveform small-footprint airborne laser scanners. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 163–168. [Google Scholar]
- Wagner, W. Radiometric calibration of small-footprint full-waveform airborne laser scanner measurements: Basic physical concepts. ISPRS J. Photogramm. Remote Sens. 2010, 65, 505–513. [Google Scholar] [CrossRef]
- Li, X.; Liang, Y.; Xu, L. Bidirectional reflectance distribution function based surface modeling of non-Lambertian using intensity data of light detection and ranging. JOSA A 2014, 31, 2055–2063. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.K.; Philpot, W.D. Using SHOALS LIDAR system to detect bottom material change. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002; Volume 5, pp. 2690–2692.
- Luzum, B.; Starek, M.; Slatton, K.C. Normalizing ALSM intensities; Geosensing Engineering and Mapping (GEM) Center Report No. Rep_2004-07-01; Civil and Coastal Engineering Department, University of Florida: Gainesville, FL, USA, 2004. [Google Scholar]
- Vain, A.; Yu, X.; Kaasalainen, S.; Hyyppä, J. Correcting airborne laser scanning intensity data for automatic gain control effect. Geosci. Remote Sens. Lett. 2010, 7, 511–514. [Google Scholar] [CrossRef]
- Habib, A.F.; Kersting, A.P.; Shaker, A.; Yan, W.Y. Geometric calibration and radiometric correction of LIDAR data and their impact on the quality of derived products. Sensors 2011, 11, 9069–9097. [Google Scholar] [CrossRef] [PubMed]
- Briese, C.; Pfennigbauer, M.; Lehner, H.; Ullrich, A.; Wagner, W.; Pfeifer, N. Radiometric Calibration of Multi-Wavelength Airborne Laser Scanning Data; ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences (ISPRS Annals): Melbourne, Australia, 2012; Volume 25, pp. 335–340. [Google Scholar]
- Errington, A.F.; Daku, B.L.; Prugger, A.F. A model based approach to intensity normalization for terrestrial laser scanners. In Proceedings of the International Symposium on LIDAR and Radar Mapping Technologies, Hong Kong, China, 26–29 May 2011.
- Chasmer, L.; Hopkinson, C.; Smith, B.; Treitz, P. Examining the influence of laser pulse repetition frequencies on conifer forest canopy returns. Photogramm. Eng. Remote Sens. 2006, 72, 1359–1367. [Google Scholar] [CrossRef]
- Hartzell, P.J.; Glennie, C.L.; Finnegan, D.C. Empirical waveform decomposition and radiometric calibration of a terrestrial full-waveform laser scanner. IEEE Trans. Geosci. Remote Sens. 2015, 53, 162–172. [Google Scholar] [CrossRef]
- Steinvall, O.K.; Koppari, K.R. Depth sounding LIDAR: An overview of Swedish activities and future prospects. In CIS Selected Papers: Laser Remote Sensing of Natural Waters—From Theory to Practice; International Society for Optics and Photonics: St. Petersburg, Russia, 1996; Volume 2964, pp. 2–24. [Google Scholar]
- Qin, Y.; Yao, W.; Vu, T.T.; Li, S.; Niu, Z.; Ban, Y. Characterizing Radiometric Attributes of Point Cloud Using a Normalized Reflective Factor Derived From Small Footprint LIDAR Waveform. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2015, 8, 740–749. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kashani, A.G.; Olsen, M.J.; Parrish, C.E.; Wilson, N. A Review of LIDAR Radiometric Processing: From Ad Hoc Intensity Correction to Rigorous Radiometric Calibration. Sensors 2015, 15, 28099-28128. https://doi.org/10.3390/s151128099
Kashani AG, Olsen MJ, Parrish CE, Wilson N. A Review of LIDAR Radiometric Processing: From Ad Hoc Intensity Correction to Rigorous Radiometric Calibration. Sensors. 2015; 15(11):28099-28128. https://doi.org/10.3390/s151128099
Chicago/Turabian StyleKashani, Alireza G., Michael J. Olsen, Christopher E. Parrish, and Nicholas Wilson. 2015. "A Review of LIDAR Radiometric Processing: From Ad Hoc Intensity Correction to Rigorous Radiometric Calibration" Sensors 15, no. 11: 28099-28128. https://doi.org/10.3390/s151128099
APA StyleKashani, A. G., Olsen, M. J., Parrish, C. E., & Wilson, N. (2015). A Review of LIDAR Radiometric Processing: From Ad Hoc Intensity Correction to Rigorous Radiometric Calibration. Sensors, 15(11), 28099-28128. https://doi.org/10.3390/s151128099