Figure 3 shows the measured group delay curves of the two SAW sensors at room temperature. In
Figure 3, we can see that the group delay curve of each SAW sensor shows a sharp peak, which is originated from the resonance of the SAW resonator. It can be seen in
Figure 3 that the resonance frequencies of Device A and Device B are 216.1872 MHz and 225.1688 MHz, respectively. The resonance frequency
fr of the SAW resonator can be expressed as:
where ν is the SAW velocity in the LGS substrate and λ is the wavelength of the IDT. In our devices, the wavelength is 12 μm. Then, with the Equation (2), the SAW velocity of Device A and Device B are 2594 m/s and 2702 m/s, respectively. It can be concluded that the SAW velocity is higher on (0°, 138.5°, 27°) cut than that on (0°, 138.5°, 117°) cut in LGS substrate. These results are very close to the reported data [
9].
Figure 3.
Group delay curves of the two devices at room temperature.
3.1. Temperature Response
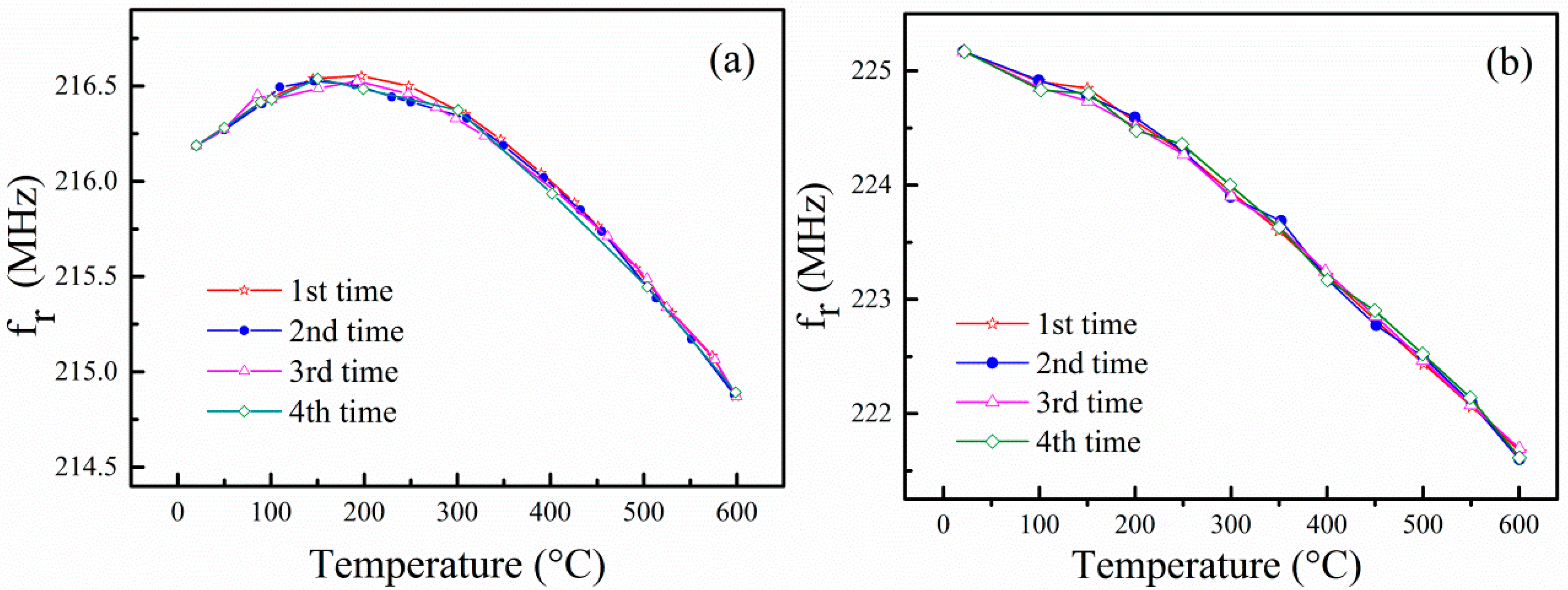
Figure 4 shows the resonance frequency of the devices as a function of temperature. The resonance frequency of the devices was measured from room temperature to 600 °C four times. It is observed that there is good reproducibility for the measured resonance frequency at each thermal cycling measurement, which indicates that the LGS SAW sensors are very stable below 600 °C. The stability of the SAW sensor is attributed to the stable Au-Ti electrodes and the annealing procedure before measurements. Au-Ti thin film electrodes are widely used for high temperature sensors for their excellent oxidation resistance and outstanding electrical properties [
16]. The annealing process not only releases residual stresses but also eliminates voids in Au-Ti film electrodes, so as to improve the thermal stability of the prepared LGS SAW sensor.
Figure 4.
Resonance frequency of the devices as a function of temperature: (a) Device A and (b) Device B.
Figure 4.
Resonance frequency of the devices as a function of temperature: (a) Device A and (b) Device B.
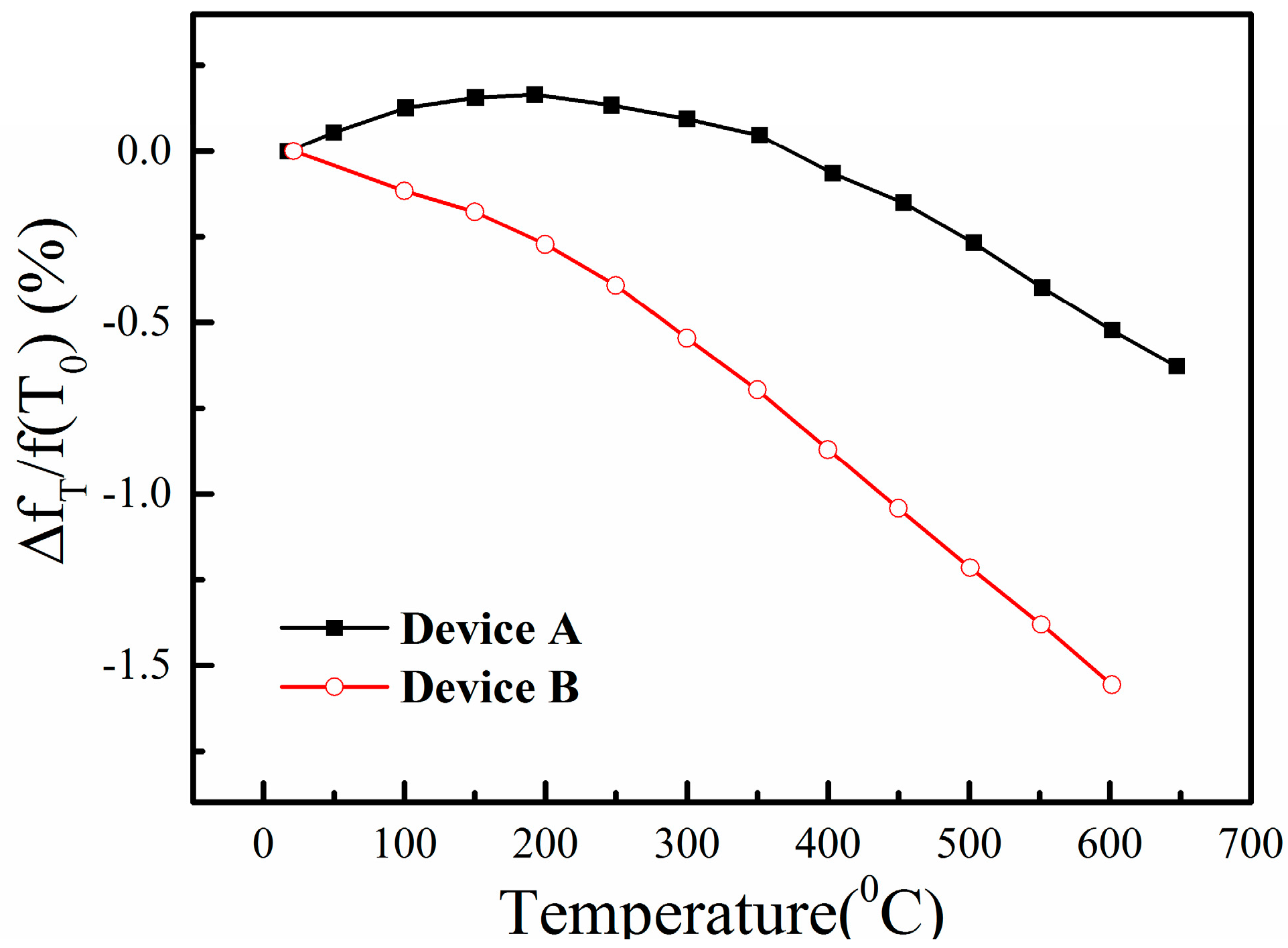
Figure 5.
The relative changes of the resonance frequency as a function of temperature.
Figure 5.
The relative changes of the resonance frequency as a function of temperature.
The measured relative changes of the SAW resonance frequency Δ
fT/
fr(
T0) as a function of the temperature for the two SAW sensors are plotted in
Figure 5. We can find that the relative resonance frequency change of Device B reaches −1.56% at 600 °C, while that of Device A is only −0.52%. The measured results of the two LGS sensors are in good agreement with Peng’s work on langasite temperature sensors [
10], where the SAW velocity decrease at 600 °C was about 15 m/s (−0.5%) for LGS (0°, 138.5°, 117°) and 35 m/s (−1.2%) for LGS (0°, 138.5°, 27°). Furthermore, the relative resonance frequency change of Device A rises with the increasing of the temperature below 200 °C and then decreases with the further increasing of the temperature, while that of Device B decreases monotonically with the increasing of the temperature in the range of 20–600 °C. Furthermore, the Q factor of Device A decreases from 1292 to 403 from 20 °C to 600 °C, while the Q factor of Device B decreases from 1117 to 551 from 20 °C to 600 °C. These results suggest that SAW Device B is more suitable for temperature sensing because its dependence of the resonance frequency on the temperature is strong and monotonic.
The relative frequency variation with temperature of the SAW resonator
φ(T) can be written as [
17],
where
fr(T) and the
fr(T0) are the resonance frequencies of the devices at temperature
T and reference temperature
T0, respectively.
In general, the thermal effects on the resonance frequency of the SAW resonator are due to the change in the length of the substrate and the substrate material parameter including density and elastic coefficients [
17]. However, it should be noted that, in our experiments the thermal strain induced from the expansion of the cantileverand the thermal expansion mismatch between the sensor and cantilever also contribute to the shift of the resonance frequency because the SAW sensor is attached to the metal cantilever. Thus, we consider that the coefficient
φ(T) includes all of the thermal influences of this sensing system at high temperature.
3.2. Strain Response
To characterize the strain response of the prepared LGS SAW sensors, strain is applied to Device A in 100 με increments from 0 to 300 με, and returns to 0 με, while the temperature is held at room temperature. The applied strain as a function of the deflection was calibrated with resistive strain gauge before measurement. The measured resonance frequency shifts of Device A under different strain loading sequence are given in
Figure 6a. In
Figure 6a, we can see that the resonance frequency shift increases with the increasing of the applied strain. At each loading step, the resonance frequency changes very slightly. It is clear that the SAW response shows good correlation to the strain gauge. The mean resonance frequency shift of Device A as a function of the applied strain at room temperature is plotted in
Figure 6b. It is observed that the resonance frequency shift decreases linearly with the applied strain. The resonance frequency shift decreases by 35 kHz when the applied strain increment is 100 με, which means that the resonance frequency shift is about 350 Hz per micro-strain for Device A. We can find this strain sensitivity coefficient is close to Wilson’s work [
18]. Applied strain would not only change the acoustic wavelength, but also influences the elastic coefficients and density of the substrate materials [
19]. Both of these parameters affect the acoustic wave propagation and are manifested in the changes in the velocity of the SAW devices, and then affect the resonance frequency [
18].
Figure 6.
Resonance frequency shifts of Device A (a) under different strain loading sequences; and (b) as a function of the applied strain at room temperature.
Figure 6.
Resonance frequency shifts of Device A (a) under different strain loading sequences; and (b) as a function of the applied strain at room temperature.
Next, we discuss the temperature dependency of the SAW strain sensors at high temperature. When we consider the combined effects of the temperature and the applied strain on the SAW resonator, its resonance frequency can be expressed as [
20]
where
fr(T,d) is the resonance frequency of the SAW resonator when the ambient temperature is
T and the deflection of the cantilever is d.
T0 is the reference temperature and
ϕ(d) is the strain factor of the SAW resonance frequency. Here,
ϕ(d) only represents the frequency shift originated from the applied strain caused by the deflection
d, because the frequency shift induced by the thermal effects of the LGS substrate and the metal cantilever is already included in
φ(T).
The dependence of the resonance frequency shift on the deflection
d at different temperature is shown in
Figure 7. Here the resonance frequency shift is defined as:
Figure 7.
Dependence of the resonance frequency shift on the deflection at different temperatures: (a) Device A and (b) Device B.
Figure 7.
Dependence of the resonance frequency shift on the deflection at different temperatures: (a) Device A and (b) Device B.
In
Figure 7, we can see that the resonance frequency shift decreases linearly with the increasing of the deflection of the cantilever,
i.e., the resonance frequency shift decreases with applied strain. At the same time, we can find that the resonance frequency shifts are due to the combined effects from temperature and strain. To extract the frequency change caused by the applied strain in
Figure 7, the strain factor
ϕ(d) is obtained from Equation (4) and expressed as
With the measured data, as shown in
Figure 7 and Equation (6), the frequency shifts caused by strain are calculated and plotted in
Figure 8. We can observe that
ϕ(d) is linear to the deflection. Then,
ϕ(d) can be expressed as
where SF is the frequency sensitive factor of the SAW strain sensor, which is dependent on the applied deflection. From Equation (7), the slope of the frequency shift curves, as shown in
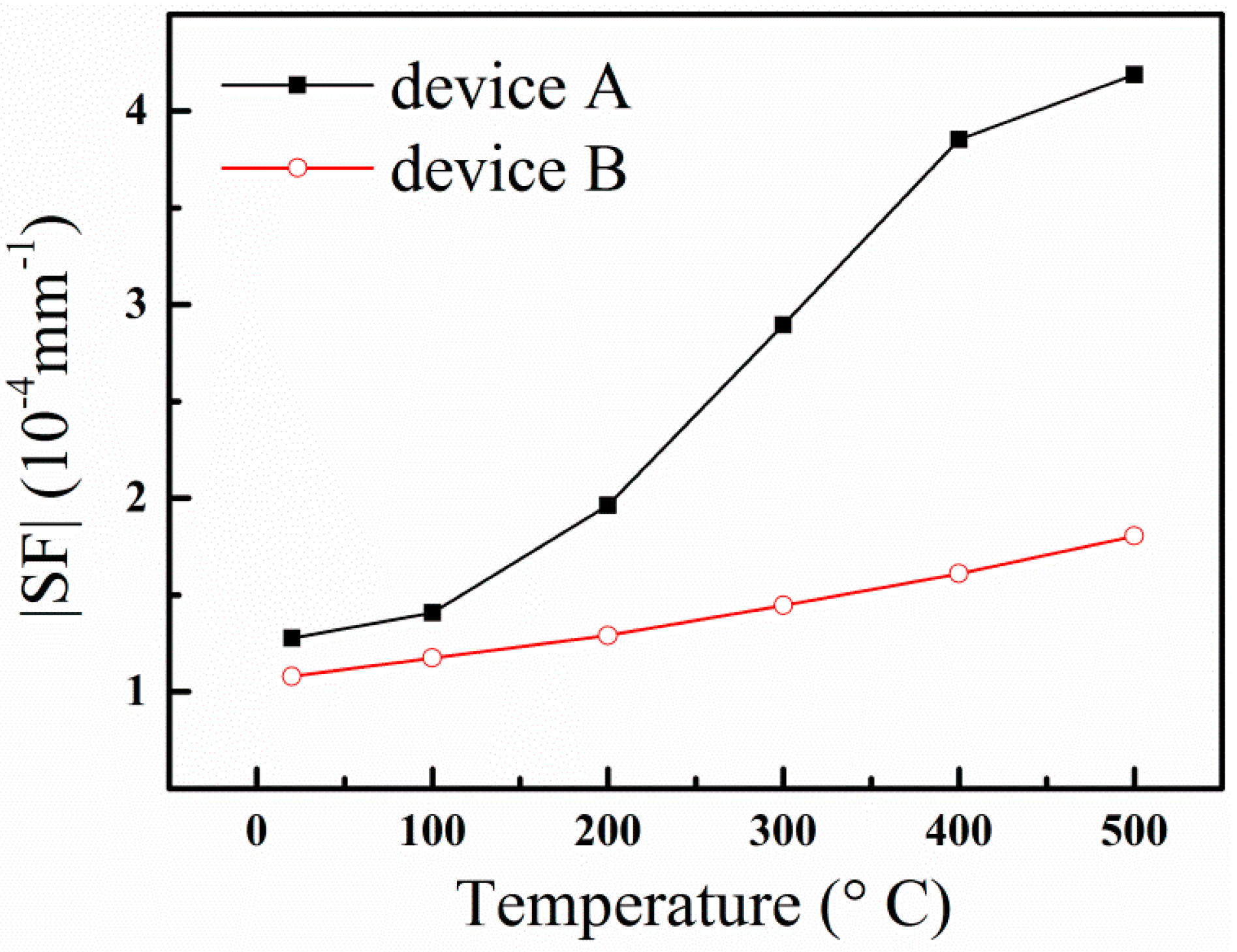
Figure 8, is just the sensitive factor of the SAW strain sensor. We can find that the SF is different at different temperatures. The SFs of the two SAW sensors at different temperature are plotted in
Figure 9.
Figure 8.
Dependence of ϕ(d) on the applied deflection at different temperature for (a) Device A and (b) Device B.
Figure 8.
Dependence of ϕ(d) on the applied deflection at different temperature for (a) Device A and (b) Device B.
In
Figure 9, we can see that from room temperature to 100 °C, the sensitive factor SF of Device A is almost the same as that of Device B. However, it is obvious that Device A is more sensitive to the applied strain than Device B above 100 °C. At 500 °C, the absolute values of the SF of Device A and Device B are 4.19 × 10
−4 mm
−1 and 1.80 × 10
−4 mm
−1, respectively. These results show that the SAW is very sensitive to the strain on the LGS (0°, 138.5°, 117°) crystal cut. We can find that the SF of Device A and Device B are dependent on temperature. The |SF| values of Device A and Device B increase with increasing temperature, which indicates that the SAW sensors are more sensitive to strain at high temperatures. This is because the change of the elastic coefficients of the LGS substrate induced by applied strain at high temperatures is greater than that at room temperature [
21]. At the same time, we can find that the SF values of Device A increase nonlinearly with increasing temperature, while the SF of Device B is linear with temperature. Though Device A has larger sensitivity to strain, it is difficult to compensate for temperature due to its nonlinear SF temperature dependency. However, it is easier to implement temperature compensation for Device B with its linear SF temperature dependency. The research of temperature compensation is very important for the application of SAW strain sensor. Further research on temperature compensation using compensating film techniques [
22] is in process.
Figure 9.
|SF| of Device A and Device B dependent on temperature.
Figure 9.
|SF| of Device A and Device B dependent on temperature.
3.3. Error Analysis
The relative errors (
eL) between the measurement data and the linear fitting line in strain measurements is defined as [
7]
where
△ϕ(d) is the maximum deviation between the measurement data and the fitting curve, and
YFS is the full Y-scale range of the measurement, which equals to
ϕ(
T,d = 4 mm)−
ϕ(
T, d = 0). The calculated
eL values of the two devices are presented in
Table 1. The relative errors of the two sensors are between 0.63% and 2.09%, which indicates the linearity of the sensor is good in strain measurements.
Table 1.
The eL of Device A and Device B at different temperatures.
Table 1.
The eL of Device A and Device B at different temperatures.
| T (°C) | 20 | 100 | 200 | 300 | 400 | 500 |
|---|
| eL_A (%) | 1.68 | 1.42 | 0.86 | 2.09 | 1.89 | 1.92 |
| eL_B (%) | 1.08 | 1.11 | 1.23 | 0.63 | 1.59 | 1.66 |
The hysteresis error, which is the maximum deviation in output at any measurement value within the sensor’s specified range when approaching the point first with increasing and then with decreasing strain, is defined as [
8]
where ΔH
m is the maximum difference of the measured value in loading and unloading directions.
In our measurements, hysteresis errors were observed (
Figure 10). The
δHm of Device A and Device B are calculated and shown in
Table 2. From
Table 2, we can find that the hysteresis errors of the two devices increase with the rising of temperature, which indicates that the measurement error is bigger at high temperature. This is related to the adhesive used to install the sensor and the temperature conditions used to cure the adhesive. These hysteresis errors caused by temperature could be reduced by implementing an equivalent sensing system with two SAWR elements manufactured on a single die [
23]. However, even at 500 °C, the
δHm of the two devices are still less than 5%, which is comparable with the results in [
7] and indicates that these two sensors have good performance in high-temperature environments.
Figure 10.
The hysteresis between loading and unloading direction of Device A at 20 °C.
Figure 10.
The hysteresis between loading and unloading direction of Device A at 20 °C.
Table 2.
The hysteresis of Device A and Device B at different temperatures.
Table 2.
The hysteresis of Device A and Device B at different temperatures.
| T (°C) | 20 | 100 | 200 | 300 | 400 | 500 |
|---|
| δHm_A (%) | 3.55 | 3.62 | 3.40 | 4.02 | 4.27 | 4.53 |
| δHm_B (%) | 2.48 | 2.04 | 2.58 | 3.66 | 3.97 | 4.79 |













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
