
Toward Higher-Order Mass Detection: Influence of an Adsorbate’s Rotational Inertia and Eccentricity on the Resonant Response of a Bernoulli-Euler Cantilever Beam


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction

2. Theoretical Modeling
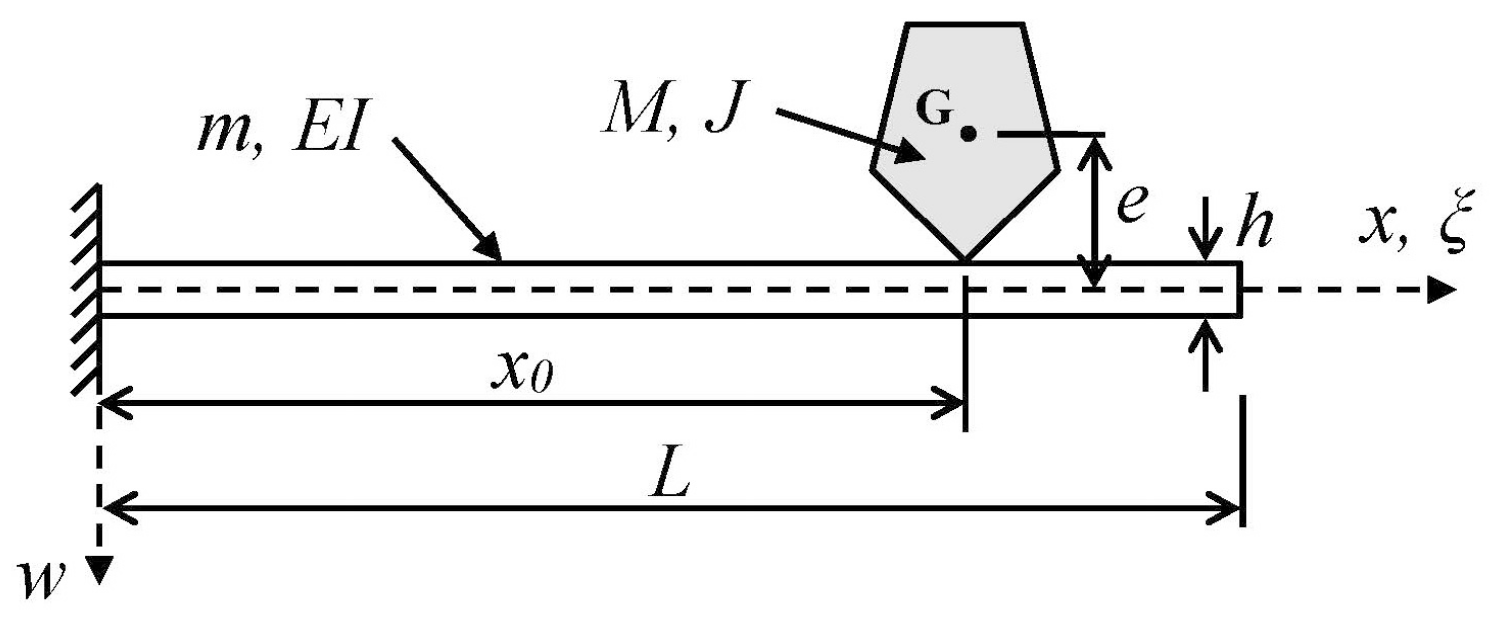
2.1. Problem Statement
2.2. Assumptions
- The kinematic assumptions of Bernoulli-Euler beam theory apply (e.g., [44]).
- The cantilever has a uniform rectangular cross section of thickness h and width b.
- The added mass (adsorbate) is assumed to be rigid and rigidly connected to the beam at an arbitrary point, i.e., the vertical position and rotational orientation of the attached particle at any time are determined, respectively, by the deflection and slope of the deformed beam axis at the attachment location. In the undeformed beam configuration the point of attachment is assumed to be directly beneath the center of mass (G) of the added mass.
- The adsorbate is assumed to have no effect on the cantilever’s stiffness.
- Damping is neglected, as are the effects of any surrounding fluid (gas or liquid).
2.3. Formulation of the Boundary Value Problem (BVP)
2.4. Exact Solution of the Boundary Value Problem
2.5. Linearized Approximation for the Frequency Parameter

2.6. Refined Analytical Solution
2.7. Linearized Expressions for the Natural Frequencies; Discrete-Mass Sensitivity
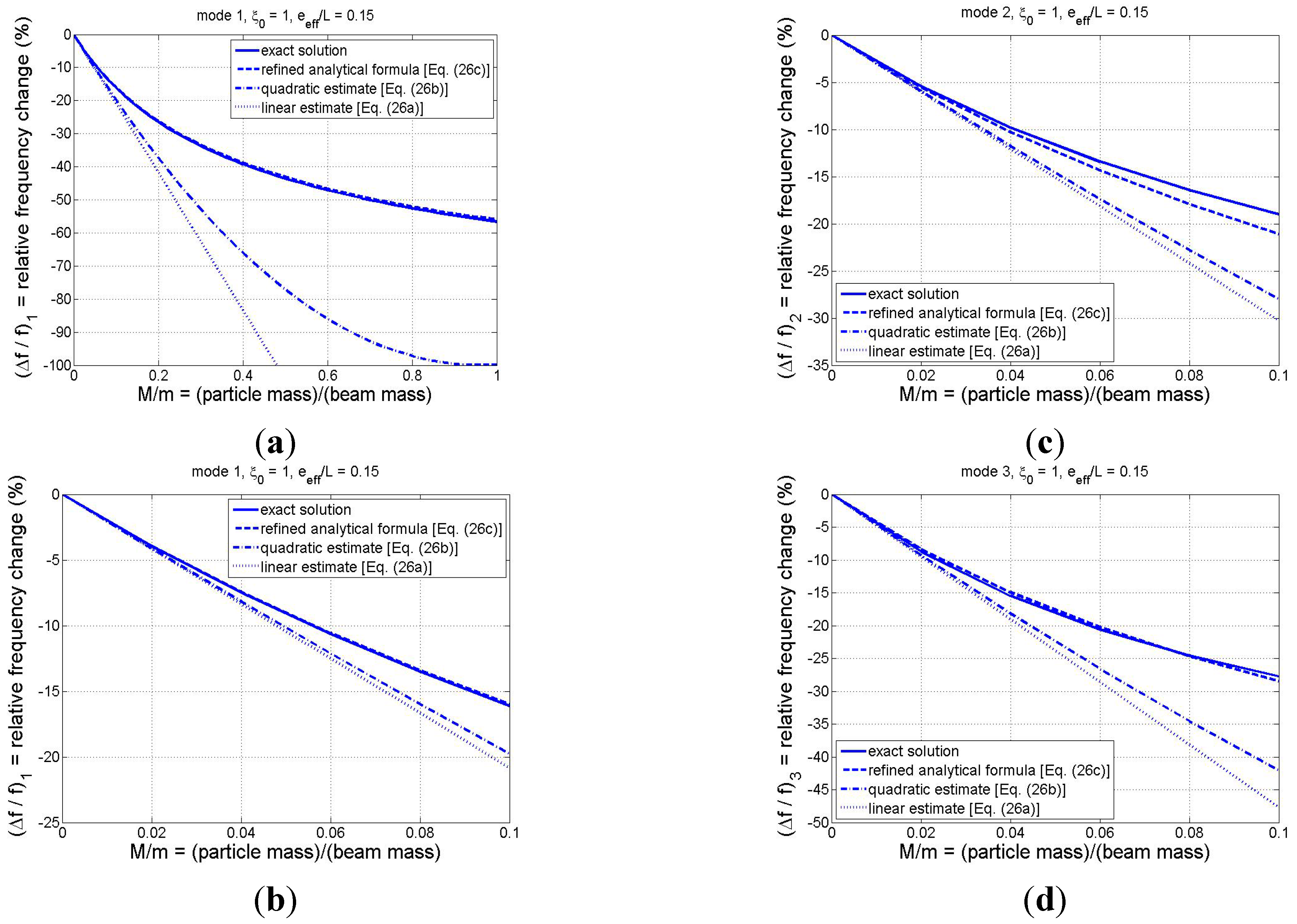
2.8. Accuracy of the Various Analytical Formulas for the Adsorbate-Induced Frequency Change


2.9. Rayleigh-Method Interpretation of Refined Analytical Solution
3. Results and Discussion
3.1. General Parametric Study: Effects of Adsorbate Mass, Adsorbate Position, Effective Eccentricity, and Mode Number on the Frequency Response
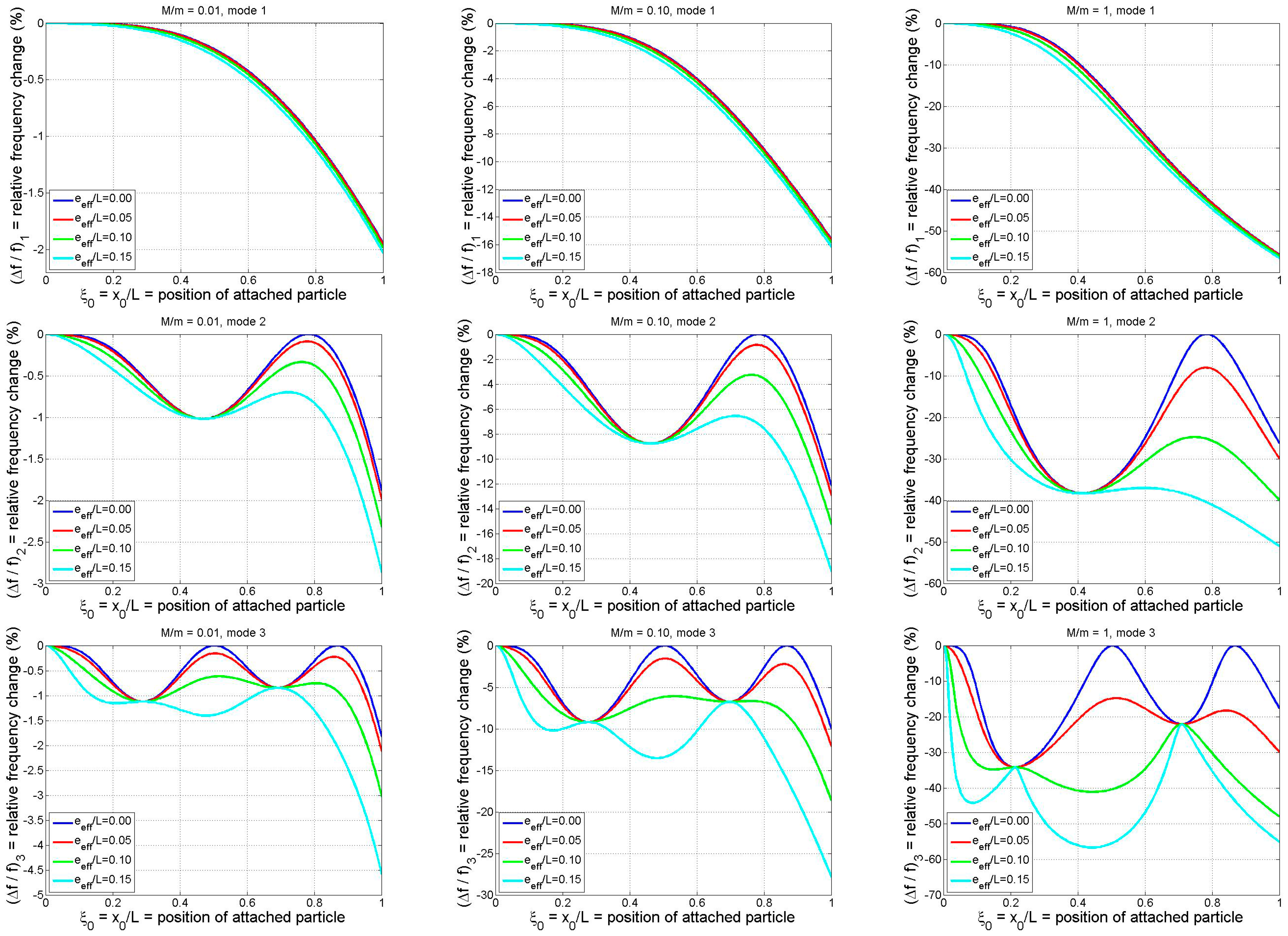
- As expected, the frequency shift is strongly dependent on the longitudinal position of the particle and its magnitude increases as the particle mass increases.
- An increase in the value of the effective eccentricity parameter increases the frequency change magnitude. This is to be expected since larger values of correspond to increased rotational inertia contributions to the system’s effective mass. There do exist, however, specific particle locations at which the effective eccentricity of the particle has no influence on the system’s natural frequency. These are the locations at which the slope of the associated mode shape is zero. For mode n there are n such rotational node locations (points of zero rotation in the mode shape) as evidenced by the values of at which all four curves meet in each of the individual graphs in the figure.
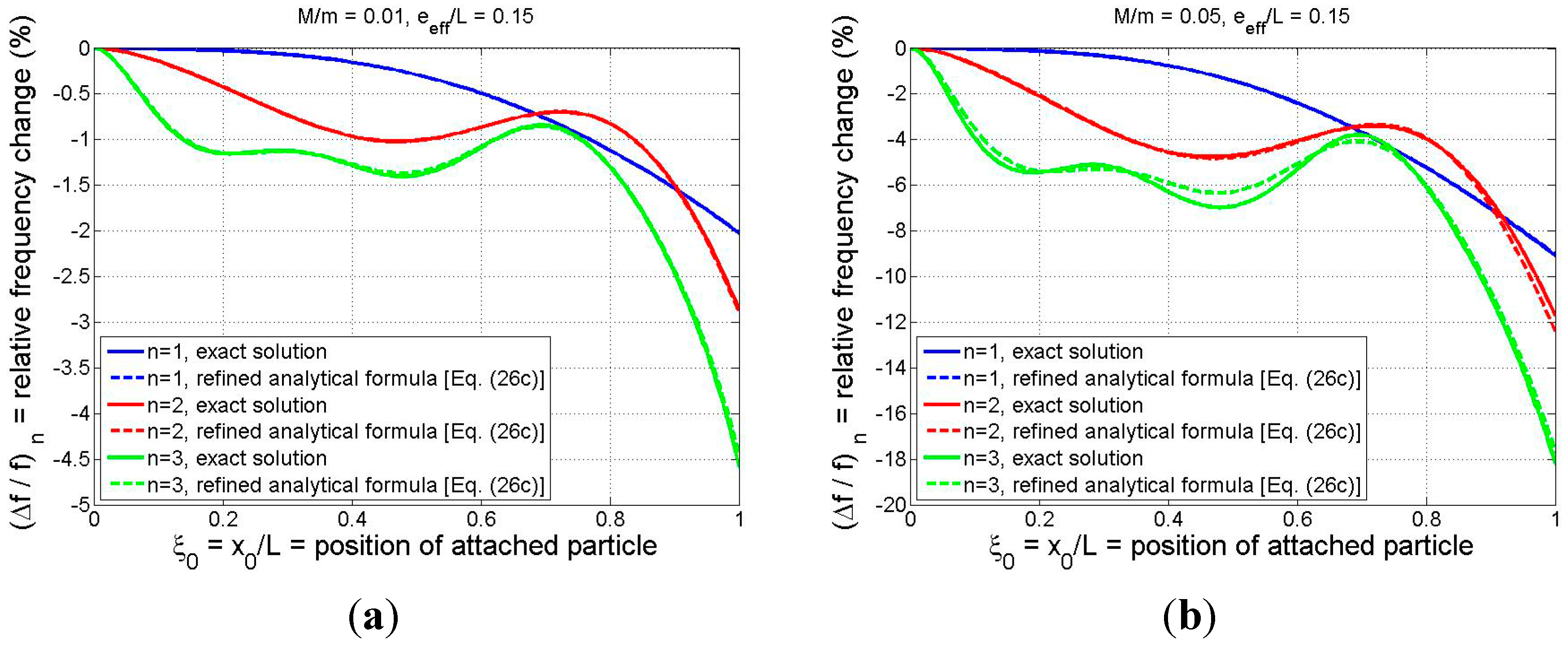
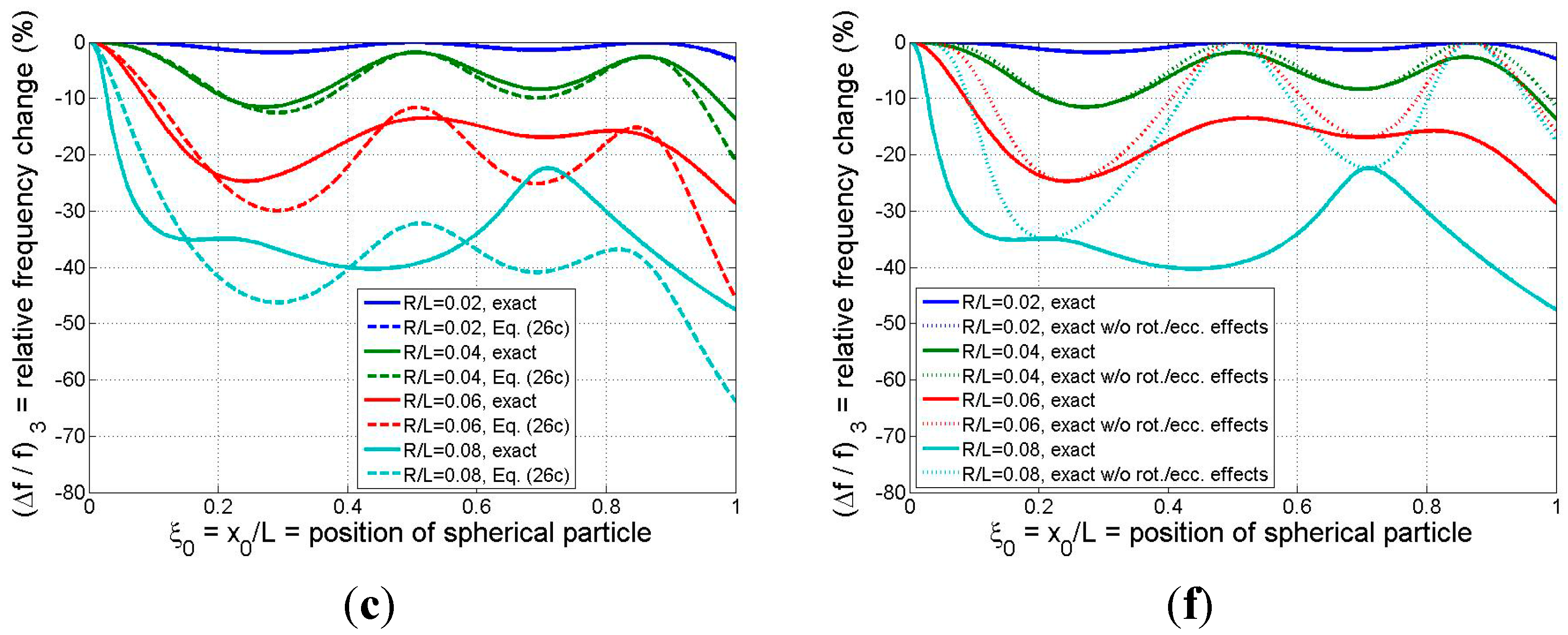
- While the role of the effective eccentricity parameter is minimal near a rotational node, it tends to be quite significant in the vicinity of a translational node, i.e., at the locations at which the mode shape takes on zero values. For the case these translational nodes may be identified in Figure 5 as the locations at which the blue curves yield zero frequency shift. For mode n there are n such translational nodes. The translational inertia of an adsorbate positioned at a translational node will make no contribution to the system’s effective mass, but any rotational inertia and/or eccentricity possessed by the particle will make a contribution and, thus, affect the natural frequency. Moreover, the plots indicate that the frequency response of the system will be rather sensitive to the adsorbate’s rotational inertia/eccentricity when the particle binds near a translational node. This is due to the fact that the slope of the mode shape (beam rotation) tends to be (approximately) maximal at the translational nodes. Thus, any mass detection technique that neglects the adsorbate’s rotational inertia/eccentricity (e.g., [5,10,15,18,32]) may result in significant error when the particle binds to the beam near a translational node. Conversely, a binding event near a translational node may afford an opportunity to ascertain rotational inertia characteristics of an adsorbate, resulting in “higher-order” mass detection possibilities.
- Based on the cases considered in the first row of Figure 5, the rotational inertia/eccentricity effects have a relatively small influence on the fundamental modal response, even for the case of a large adsorbate mass. (There may, however, be other cases in which this is not the case. For example, an earlier study focusing on fundamental-mode response [3] noted that the particle’s rotational inertia can be “essential” and may account for ~10% of the particle-induced frequency shift.) As the mode number increases, however, the relative frequency shift becomes much more sensitive to the value of . This may be explained by the fact that, as n increases, the number of sign changes in the mode shape does as well, meaning that the slopes of the mode shape tend to get progressively larger (relative to the displacements) as n increases. In the case of small adsorbate mass, this is exhibited mathematically by the presence of in Equation (18) and the form of the denominator in the refined analytical solution of Equation (26c) (or in the equivalent result of Equation (28b)). Since most proposed discrete-mass-detection techniques are based on “point mass” idealizations and multi-modal frequency data (e.g., four modes are used in [5]), special care should be taken when applying these techniques due to the increased importance of the adsorbate’s rotational inertia and eccentricity as n increases.

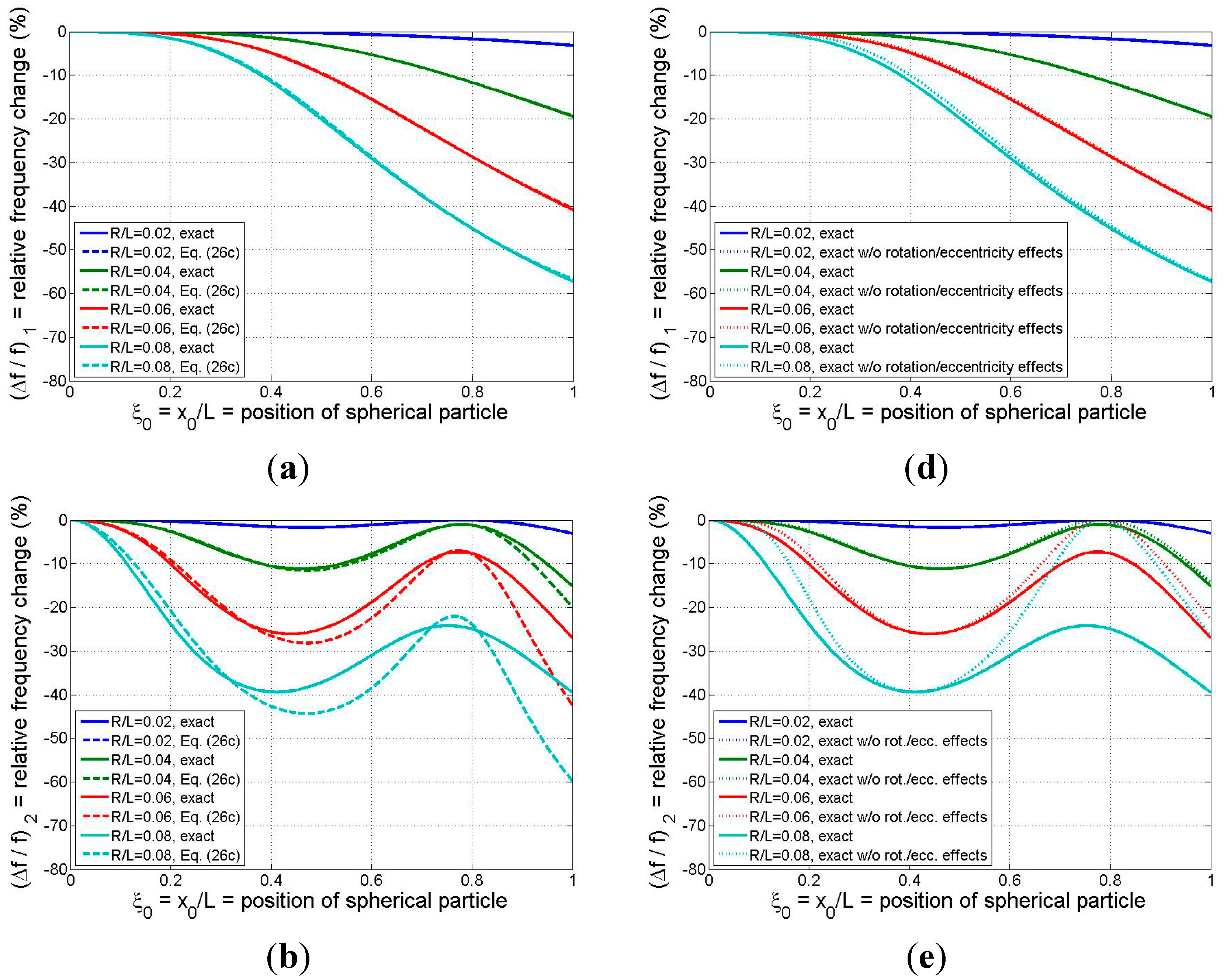
3.2. Example of a Spherical Adsorbate


4. Summary/Conclusions/Outlook
- A robust experimental database on particle-induced frequency shifts needs to be generated. The database should span sufficiently broad ranges of particle/beam parameters (a) to provide a means of checking the theoretical results presented in the current study, and (b) to experimentally examine the feasibility of the concept of “higher-order mass detection” that takes advantage of rotational inertia/eccentricity effects to probe additional adsorbate information beyond what more conventional mass detection approaches may provide.
- A straightforward extension of the cantilever model to the case of a bridge beam may be performed and is currently being developed. Recent research has indicated that the fixed-fixed boundary conditions of a bridge may yield a device with higher mass sensitivity than the fixed-free conditions of a cantilever [15,18,32]; however, the resonant amplitudes will be much smaller due to the increased stiffness and stress-stiffening effects may play a role.
- The present work includes the limiting cases in which the adsorbate is rigidly attached (“welded”) to the beam and when it is incapable of transferring any rotational loads to the beam (“pinned” connection). Results for the latter, corresponding to the case in which a particle rests on the beam but experiences local rolling contact, may be generated by the present model by setting the effective eccentricity parameter to zero. In reality the actual scenario is expected to lie between these two limits, i.e., the binding process will furnish some finite value of “rotational adherence” between the particle and the beam surface. Thus, a more generalized model that accounts for this interaction is warranted and is currently being developed.
- Although it has been demonstrated that one-dimensional continuum modeling based on beam theory is applicable for particular nanoscale devices (e.g., [9]), the continued miniaturization of mass-detection devices may eventually push the limits of classical modeling approaches. To address this issue, an extension of the present model to incorporate small-scale effects such as non-locality [14,16,47], surface effects [16,47], couple-stress effects [34], and microstructural inhomogeneity [34,35] should be pursued.
- Future work may also include a detailed exploration of back-calculation algorithms, based on the present model, for converting multi-modal frequency data to information on the position, mass, and geometry of the adsorbate. Such an algorithm would be analogous to recently developed approaches for cases in which rotational inertia and eccentricity are negligible [5,15,17,19,32].
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Brand, O.; Dufour, I.; Heinrich, S.M.; Josse, F. Resonant MEMS. Fundamentals, Implementation and Application; Wiley-VCH Verlag: Weinheim, Germany, 2015. [Google Scholar]
- Ekinci, K.L.; Huang, X.M.H.; Roukes, M.L. Ultrasensitive nanoelectromechanical mass detection. Appl. Phys. Lett. 2004, 84, 4469–4471. [Google Scholar] [CrossRef]
- Ilic, B.; Craighead, H.G.; Krylov, S.; Senaratne, W.; Ober, C.; Neuzil, P. Attogram detection using nanoelectromechanical oscillators. J. Appl. Phys. 2004, 95, 3694–3703. [Google Scholar] [CrossRef]
- Dohn, S.; Sandberg, R.; Svendsen, W.; Boisen, A. Enhanced functionality of cantilever based mass sensors using higher modes. Appl. Phys. Lett. 2005, 86. [Google Scholar] [CrossRef]
- Dohn, S.; Svendsen, W.; Boisen, A.; Hansen, O. Mass and position determination of attached particles on cantilever based mass sensors. Rev. Sci. Instrum. 2007, 78. [Google Scholar] [CrossRef] [PubMed]
- Chun, D.W.; Hwang, K.S.; Eom, K.; Lee, J.H.; Cha, B.H.; Lee, W.Y.; Yoon, D.S.; Kim, T.S. Detection of the Au thin-layer in the Hz per picogram regime based on the microcantilevers. Sens. Actuator A Phys. 2007, 135, 857–862. [Google Scholar] [CrossRef]
- Jensen, K.; Kwanpyo, K.; Zettl, A. An atomic-resolution nanomechanical mass sensor. Nat. Nanotechnol. 2008, 3, 533–537. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Li, X. Bianalyte mass detection with a single resonant microcantilever. Appl. Phys. Lett. 2009, 94. [Google Scholar] [CrossRef]
- Wang, S.-C.; Chang, Y.-C.; Lien, D.-H.; Hsu, T.; Chang, C.-S. Resonance frequency shift of a car-bon nanotube with a silver nanoparticle adsorbed at various positions. Appl. Phys. Lett. 2010, 97. [Google Scholar] [CrossRef]
- Dohn, S.; Schmid, S.; Amiot, F.; Boisen, A. Position and mass determination of multiple particles using cantilever based mass sensors. Appl. Phys. Lett. 2010, 97. [Google Scholar] [CrossRef] [Green Version]
- Boisen, A.; Dohn, S.; Keller, S.S.; Schmid, S.; Tenje, M. Cantilever-like micromechanical sensors. Rep. Prog. Phys. 2011, 74. [Google Scholar] [CrossRef]
- Elishakoff, I.; Versaci, C.; Maugeri, N.; Muscolino, G. Clamped-free single-walled carbon nanotube-based mass sensor treated as Bernoulli-Euler beam. J. Nanotechnol. Eng. Med. 2011, 2. [Google Scholar] [CrossRef]
- Elishakoff, I.; Versaci, C.; Muscolino, G. Clamped-free double-walled carbon nanotube-based mass sensor. Acta Mech. 2011, 219, 29–43. [Google Scholar] [CrossRef]
- Elishakoff, I.; Pentaras, D.; Dujat, K.; Versaci, C.; Muscolino, G.; Storch, J.; Bucas, S.; Challamel, N.; Natsuki, T.; Zhang, Y.Y.; et al. Carbon Nanotubes and Nano Sensors: Vibrations, Buckling, and Ballistic Impact; ISTE-Wiley: London, UK, 2012. [Google Scholar]
- Stachiv, I.; Fedorchenko, A.I.; Chen, Y.-L. Mass detection by means of the vibrating nanomechanical resonators. Appl. Phys. Lett. 2012, 100. [Google Scholar] [CrossRef]
- Elishakoff, I.; Challamel, N.; Soret, C.; Bekel, Y.; Gomez, T. Virus sensor based on single-walled carbon nanotube: improved theory incorporating surface effects. Philos. Transact. A Math. 2013, 371. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.; Hong, S.; Jang, J.; Park, J. Simultaneous determination of position and mass in the cantilever sensor using transfer function method. Appl. Phys. Lett. 2013, 103. [Google Scholar] [CrossRef] [Green Version]
- Hanay, M.S.; Kelber, S.I.; O’Connell, C.D.; Mulvaney, P.; Sader, J.E.; Roukes, M.L. Inertial imaging with nanomechanical systems. Nat. Nanotechnol. 2015, 10, 339–344. [Google Scholar] [CrossRef] [PubMed]
- Olcum, S.; Cermak, N.; Wasserman, S.C.; Manalis, S. High-speed multiple-mode mass-sensing resolves dynamic nanoscale mass distributions. Nat. Commun. 2015, 6. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Q. Microcantilever sensors in biological and chemical detections. Sens. Transducers 2011, 125, 1–21. [Google Scholar]
- Eom, K.; Park, H.S.; Yoon, D.S.; Kwon, T. Nanomechanical resonators and their applications in biological/chemical detection: Nanomechanics principles. Phys. Rep. 2011, 503, 115–163. [Google Scholar] [CrossRef]
- Ilic, B.; Czaplewski, D.; Zalalutdinov, M.; Craighead, H.G.; Neuzil, P.; Campagnola, C.; Batt, C. Single cell detection with micromechanical oscillators. J. Vac. Sci. Technol. B 2001, 19, 2825–2828. [Google Scholar] [CrossRef]
- Gupta, A.; Akin, D.; Bashir, R. Single virus particle mass detection using microresonators with nanoscale thickness. Appl. Phys. Lett. 2004, 84, 1976–1978. [Google Scholar] [CrossRef]
- Braun, T.; Barwich, V.; Ghatkesar, M.K.; Bredekamp, A.H.; Gerber, C.; Hegner, M.; Lang, H.P. Micromechanical mass sensors for biomolecular detection in a physiological environment. Phys. Rev. E 2005, 72. [Google Scholar] [CrossRef] [PubMed]
- Ramos, D.; Tamayo, J.; Mertens, J.; Calleja, M. Origin of the response of nanomechanical resonators to bacteria adsorption. J. Appl. Phys. 2006, 100. [Google Scholar] [CrossRef]
- Tamayo, J.; Ramos, D.; Mertens, J.; Calleja, M. Effect of the adsorbate stiffness on the resonance response of microcantilever sensors. Appl. Phys. Lett. 2006, 89. [Google Scholar] [CrossRef]
- Ramos, D.; Calleja, M.; Mertens, J.; Zaballos, A.; Tamayo, J. Measurement of the mass and rigidity of adsorbates on a microcantilever sensor. Sensors 2007, 7, 1834–1845. [Google Scholar] [CrossRef]
- Ramos, D.; Tamayo, J.; Mertens, J.; Calleja, M.; Villanueva, L.G.; Zaballos, A. Detection of bacteria based on the thermomechanical noise of a nanomechanical resonator: Origin of the response and detection limits. Nanotech. 2008, 19. [Google Scholar] [CrossRef] [PubMed]
- Braun, T.; Ghatkesar, M.K.; Backmann, N.; Grange, W.; Boulanger, P.; Letellier, L.; Lang, H.P; Bietsch, A.; Gerber, C.; Hegner, M. Quantitative time-resolved measurement of membrane protein-ligand interactions using microcantilever array sensors. Nat. Nanotechnol. 2009, 4, 179–185. [Google Scholar] [CrossRef] [PubMed]
- Park, K.; Millet, L.J.; Kim, N.; Li, H.; Jin, X.; Popescu, G.; Aluru, N.R.; Hsia, K.J.; Bashir, R. Measurement of adherent cell mass and growth. Proc. Natl. Acad. Sci. 2010, 107, 20691–20696. [Google Scholar] [CrossRef] [PubMed]
- Johnson, B.N.; Mutharasan, R. Biosensing using dynamic-mode cantilever sensors: A review. Biosens. Bioelectron. 2012, 32, 1–18. [Google Scholar] [CrossRef] [PubMed]
- Hanay, M.S.; Kelber, S.; Naik, A.K.; Chi, D.; Hentz, S.; Bullard, E.C.; Colinet, E.; Duraffourg, L.; Roukes, M.L. Single-protein nanomechanical mass spectrometry in real time. Nat. Nanotechnol. 2012, 7, 602–608. [Google Scholar] [CrossRef] [PubMed]
- Maloney, N.; Lukacs, G.; Ball, S.L.; Hegner, M. Device for filamentous fungi growth monitoring using the multimodal frequency response of cantilevers. Rev. Sci. Instr. 2014, 85. [Google Scholar] [CrossRef] [PubMed]
- Shaat, M.; Abdelkefi, A. Modeling the material structure and couple stress effects of nanocrystalline silicon beams for pull-in and bio-mass sensing applications. Int. J. Mech. Sci. 2015, 101–102, 280–291. [Google Scholar] [CrossRef]
- Shaat, M.; Abdelkefi, A. Modeling of mechanical resonators used for nanocrystalline materials characterization and disease diagnosis of HIVs. Microsyst. Technol. 2015, 14. [Google Scholar] [CrossRef]
- García, R.; Pérez, R. Dynamic atomic force microscopy methods. Surf. Sci. Rep. 2002, 47, 197–301. [Google Scholar] [CrossRef]
- Morris, V.J.; Kirby, A.R.; Gunning, A.P. Atomic Force Microscopy for Biologists, 2nd ed.; Imperial College Press: London, UK, 2010. [Google Scholar]
- Pillet, F.; Chopinet, L.; Formosa, C.; Dague, E. Atomic Force Microscopy and pharmacology: From microbiology to cancerology. Biochim. Biophys. Acta 2014, 1840, 1028–1050. [Google Scholar] [CrossRef] [PubMed]
- Beeby, S.; White, N. Energy Harvesting for Autonomous Systems; Artech House: Norwood, MA, USA, 2010. [Google Scholar]
- Heinrich, S.M.; Boudjiet, M.T.; Thuau, D.; Poulin, P.; Ayéla, C.; Dufour, I. Development of analytical models of T- and U-shaped cantilever-based MEMS devices for sensing and energy harvesting applications. In Proceedings of the IEEE Sensors Conference, Valencia, Spain, 2–5 November 2014; pp. 1648–1651.
- Sharpes, N.; Abdelkefi, A.; Priya, S. Comparative analysis of one-dimensional and two-dimensional cantilever piezoelectric energy harvesters. Energy Harvest. Syst. 2014, 1, 209–216. [Google Scholar] [CrossRef]
- Sharpes, N.; Abdelkefi, A.; Priya, S. Two-dimensional concentrated-stress low-frequency piezoelectric vibration energy harvesters. Appl. Phys. Lett. 2015, 107. [Google Scholar] [CrossRef]
- Briand, D.; Yeatman, E.; Roundy, S. Micro Energy Harvesting; Wiley-VCH Verlag: Weinheim, Germany, 2015. [Google Scholar]
- Beer, F.; Johnston, E.R.; DeWolf, J.; Mazurek, D. Mechanics of Materials, 6th ed.; McGraw-Hill: New York, NY, USA, 2011. [Google Scholar]
- Clough, R.W.; Penzien, J. Dynamics of Structures, 2nd ed.; McGraw-Hill: New York, NY, USA, 1993. [Google Scholar]
- Blevins, R.D. Formulas for Natural Frequency and Mode Shape; Van Nostrand Reinhold Company Inc.: New York, NY, USA, 1979. [Google Scholar]
- Arash, B.; Jiang, J.-W.; Rabczuk, T. A review on nanomechanical resonators and their applications in sensors and molecular transportation. Appl. Phys. Rev. 2015, 2. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heinrich, S.M.; Dufour, I. Toward Higher-Order Mass Detection: Influence of an Adsorbate’s Rotational Inertia and Eccentricity on the Resonant Response of a Bernoulli-Euler Cantilever Beam. Sensors 2015, 15, 29209-29232. https://doi.org/10.3390/s151129209
Heinrich SM, Dufour I. Toward Higher-Order Mass Detection: Influence of an Adsorbate’s Rotational Inertia and Eccentricity on the Resonant Response of a Bernoulli-Euler Cantilever Beam. Sensors. 2015; 15(11):29209-29232. https://doi.org/10.3390/s151129209
Chicago/Turabian StyleHeinrich, Stephen M., and Isabelle Dufour. 2015. "Toward Higher-Order Mass Detection: Influence of an Adsorbate’s Rotational Inertia and Eccentricity on the Resonant Response of a Bernoulli-Euler Cantilever Beam" Sensors 15, no. 11: 29209-29232. https://doi.org/10.3390/s151129209
APA StyleHeinrich, S. M., & Dufour, I. (2015). Toward Higher-Order Mass Detection: Influence of an Adsorbate’s Rotational Inertia and Eccentricity on the Resonant Response of a Bernoulli-Euler Cantilever Beam. Sensors, 15(11), 29209-29232. https://doi.org/10.3390/s151129209