
UAV Control on the Basis of 3D Landmark Bearing-Only Observations




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Visual-Based Navigation Approaches
1.2. Kalman Filter
1.3. Optical Absolute Positioning
1.4. Outline of the Approach and the Article Structure
2. Random Sample Consensus for Isometry


- The method gives either knowingly false solution or no solution at all if among the three points there are outliers.
- There is a strong dependence on the noise in the feature points’ location.
3. Filtering Problem Statement
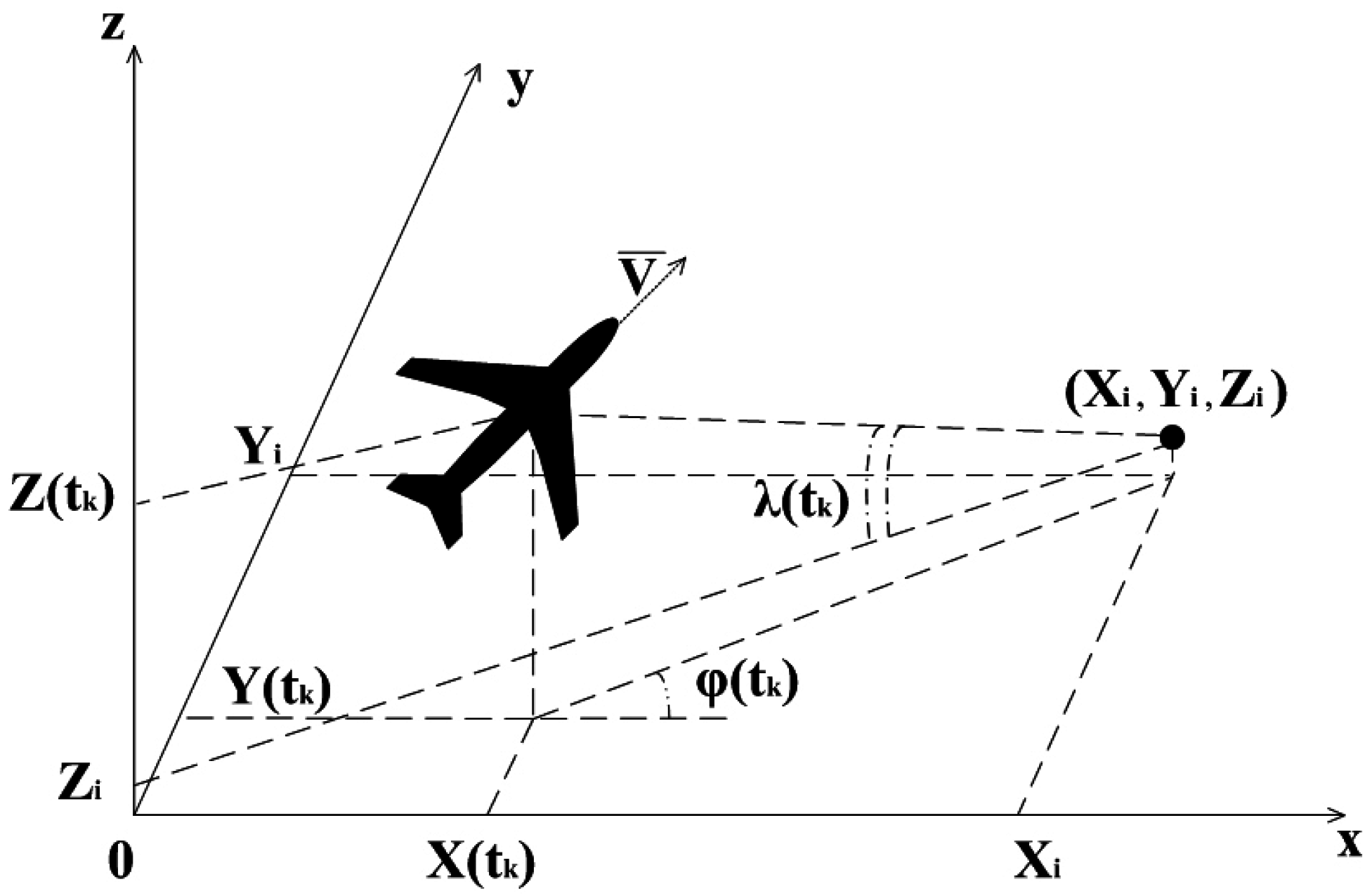
3.1. Model of the UAV’s Motion
3.2. Measurements

4. Modified Kalman Filtering on the Basis of Pseudo-Measurements
4.1. Linear Measurements Model
4.2. Prediction-Correction Estimation
4.2.1. Prediction
4.2.2. Correction
5. Robust Filtering on the Basis of the UAV Motion Model


6. Control of the UAV
7. Experimental Results

8. Results and Discussion




9. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Osborn, R.W.; Bar-Shalom, Y. Statistical Efficiency of Composite Position Measurements from Passive Sensors. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2799–2806. [Google Scholar] [CrossRef]
- Cesetti, A.; Frontoni, E.; Mancini, A.; Zingaretti, P.; Longhi, S. A Vision-Based Guidance System for UAV Navigation and Safe Landing Using Natural Landmarks. J. Intell. Robot. Syst. 2010, 57, 233–257. [Google Scholar] [CrossRef]
- Caballero, F.; Merino, L.; Ferruz, J.; Ollero, A. Vision-Based Odometry and SLAM for Medium and High Altitude Flying UAVs. J. Intell. Robot. Syst. 2009, 54, 137–161. [Google Scholar] [CrossRef]
- Wang, C.L.; Wang, T.M.; Liang, J.H.; Zhang, Y.C.; Zhou, Y. Bearing-only Visual SLAM for Small Unmanned Aerial Vehicles in GPS-denied Environments. Int. J. Autom. Comput. 2013, 10, 387–396. [Google Scholar] [CrossRef]
- Konovalenko, I.; Kuznetsova, E. Experimental comparison of methods for estimation the observed velocity of the vehicle in video stream. In Proceedings of the SPIE 9445, Seventh International Conference on Machine Vision (ICMV 2014), Milan, Italy, 19–21 November 2014; Volume 9445.
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; Volume 2, pp. 1150–1157.
- Konovalenko, I.; Miller, A.; Miller, B.; Nikolaev, D. UAV navigation on the basis of the feature points detection on underlying surface. In Proceedings of the 29th European Conference on Modeling and Simulation (ECMS 2015), Albena (Varna), Bulgaria, 26–29 May 2015; pp. 499–505.
- Guan, X.; Bai, H. A GPU accelerated real-time self-contained visual navigation system for UAVs. In Proceedings of the IEEE International Conference on Information and Automation, Shenyang, China, 6–8 June 2012; pp. 578–581.
- Belfadel, D.; Osborne, R.W.; Bar-Shalom, Y. Bias Estimation for Optical Sensor Measurements with Targets of Opportunity. In Proceedings of the 16th International Conference on Information Fusion, Istanbul, Turkey, 9–12 July, 2013; pp. 1805–1812.
- Bishop, A.N.; Fidan, B.; Anderson, B.D.O.; Dogancay, K.; Pathirana, P.N. Optimality analysis of sensor-target localization geometries. Automatica 2010, 46, 479–492. [Google Scholar] [CrossRef]
- Jauffet, C.; Pillon, D.; Pignoll, A.C. Leg-by-Leg Bearings-only Target Motion Analysis without Observer Maneuver. J. Adv. Inf. Fusion 2011, 6, 24–38. [Google Scholar]
- Lin, X.; Kirubarajan, T.; Bar-Shalom, Y.; Maskell, S. Comparison of EKF, Pseudomeasurement and Particle Filters for a Bearing-only Target Tracking Problem. Proc. SPIE Int. Soc. Opt. Eng. 2002, 4728, 240–250. [Google Scholar]
- Miller, B.M.; Stepanyan, K.V.; Miller, A.B.; Andreev, K.V.; Khoroshenkikh, S.N. Optimal filter selection for UAV trajectory control problems. In Proceeedings of the 37th Conference on Information Technology and Systems, Kaliningrad, Russia, 1–6 September 2013; pp. 327–333.
- Aidala, V.J.; Nardone, S.C. Biased Estimation Properties of the Pseudolinear Tracking Filter. IEEE Trans. Aerosp. Electron. Syst. 1982, 18, 432–441. [Google Scholar] [CrossRef]
- Pugachev, V.S.; Sinitsyn, I.N. Stochastic Differential Systems—Analysis and Filtering; Wiley: Chichester, UK, 1987. [Google Scholar]
- Amelin, K.S.; Miller, A.B. An Algorithm for Refinement of the Position of a Light UAV on the Basis of Kalman Filtering of Bearing Measurements. J. Commun. Technol. Electron. 2014, 59, 622–631. [Google Scholar] [CrossRef]
- Miller, A.B. Development of the motion control on the basis of Kalman filtering of bearing-only measurements. Autom. Remote Control 2015, 76, 1018–1035. [Google Scholar] [CrossRef]
- Karpenko, S.; Konovalenko, I.; Miller, A.; Miller, B.; Nikolaev, D. Stochastic control of UAV on the basis of 3D natural landmarks. In Proceedings of the 17th International Conference on Machine Vision (ICMV), Barselona, Spain, 19–20 November 2015.
- Miller, A.B.; Miller, B.M. Stochastic control of light UAV at landing with the aid of bearing-only observations. In Proceedings of the 17th International Conference on Machine Vision (ICMV), Barselona, Spain, 19–20 November 2015.
- GitHub. Available online: https://github.com/Itseez/opencv/blob/master/samples/python2/ asift.py (accessed on 23 September 2014).
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Zuliani, M.; Kenney, C.S.; Manjunath, B.S. The MultiRANSAC Algorithm and Its Application to Detect Planar Homographies. In Proceedings of the 12th IEEE International Conference on Image Processing (ICIP 2005), Genova, Italy, 11–14 September 2005; Volume 3, pp. III-153–156.
- Civera, J.; Grasa, O.G.; Davison, A.J.; Montiel, J.M.M. 1-Point RANSAC for Extended Kalman Filtering: Application to Real-Time Structure from Motion and Visual Odometry. J. Field Robot. 2010, 27, 609–631. [Google Scholar] [CrossRef]
- Miller, B.M.; Pankov, A.R. Theory of Random Processes (in Russian); Phizmatlit: Moscow, Russia, 2007. [Google Scholar]
- Torr, P.H.S. Geometric motion segmentation and model selection. Phil. Trans. R. Soc. A 1998, 356, 1321–1340. [Google Scholar] [CrossRef]
- Torr, P.H.S.; Zisserman, A. MLESAC: A New Robust Estimator with Application to Estimating Image Geometry. Comput. Vis. Image Underst. 2000, 78, 138–156. [Google Scholar] [CrossRef]
- Civera, J.; Grasa, O.G.; Davison, A.J.; Montiel, J.M.M. 1-Point RANSAC for EKF-Based Structure from Motion. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 11–15 October 2009; pp. 3498–3504.
- Sujit, P.B.; Saripalli, S.; Borges Sousa, J. Unmanned aerial vehicle path following: A survey and analysis of algorithms for Fixed-Wing unmanned aerial vehicless. IEEE Contol Syst. 2014, 34, 42–59. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karpenko, S.; Konovalenko, I.; Miller, A.; Miller, B.; Nikolaev, D. UAV Control on the Basis of 3D Landmark Bearing-Only Observations. Sensors 2015, 15, 29802-29820. https://doi.org/10.3390/s151229768
Karpenko S, Konovalenko I, Miller A, Miller B, Nikolaev D. UAV Control on the Basis of 3D Landmark Bearing-Only Observations. Sensors. 2015; 15(12):29802-29820. https://doi.org/10.3390/s151229768
Chicago/Turabian StyleKarpenko, Simon, Ivan Konovalenko, Alexander Miller, Boris Miller, and Dmitry Nikolaev. 2015. "UAV Control on the Basis of 3D Landmark Bearing-Only Observations" Sensors 15, no. 12: 29802-29820. https://doi.org/10.3390/s151229768
APA StyleKarpenko, S., Konovalenko, I., Miller, A., Miller, B., & Nikolaev, D. (2015). UAV Control on the Basis of 3D Landmark Bearing-Only Observations. Sensors, 15(12), 29802-29820. https://doi.org/10.3390/s151229768