
Node Non-Uniform Deployment Based on Clustering Algorithm for Underwater Sensor Networks

Abstract
:1. Introduction and Related Works
- (1)
- Based on the clustering method, the heterogeneous communication ranges of nodes are a preferred approach to promote the network connectivity rate, rather than the homogeneous communication ranges of nodes.
- (2)
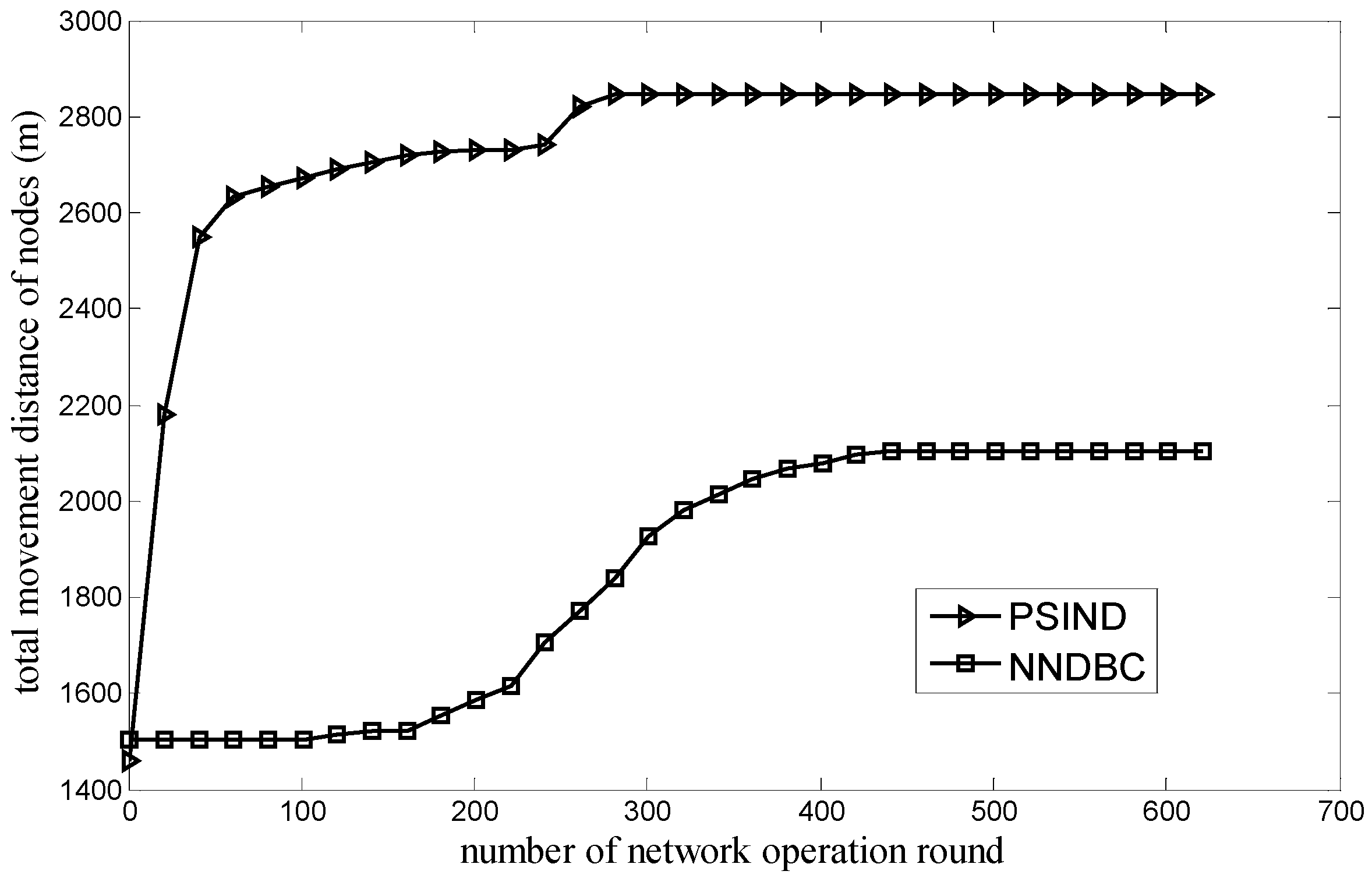
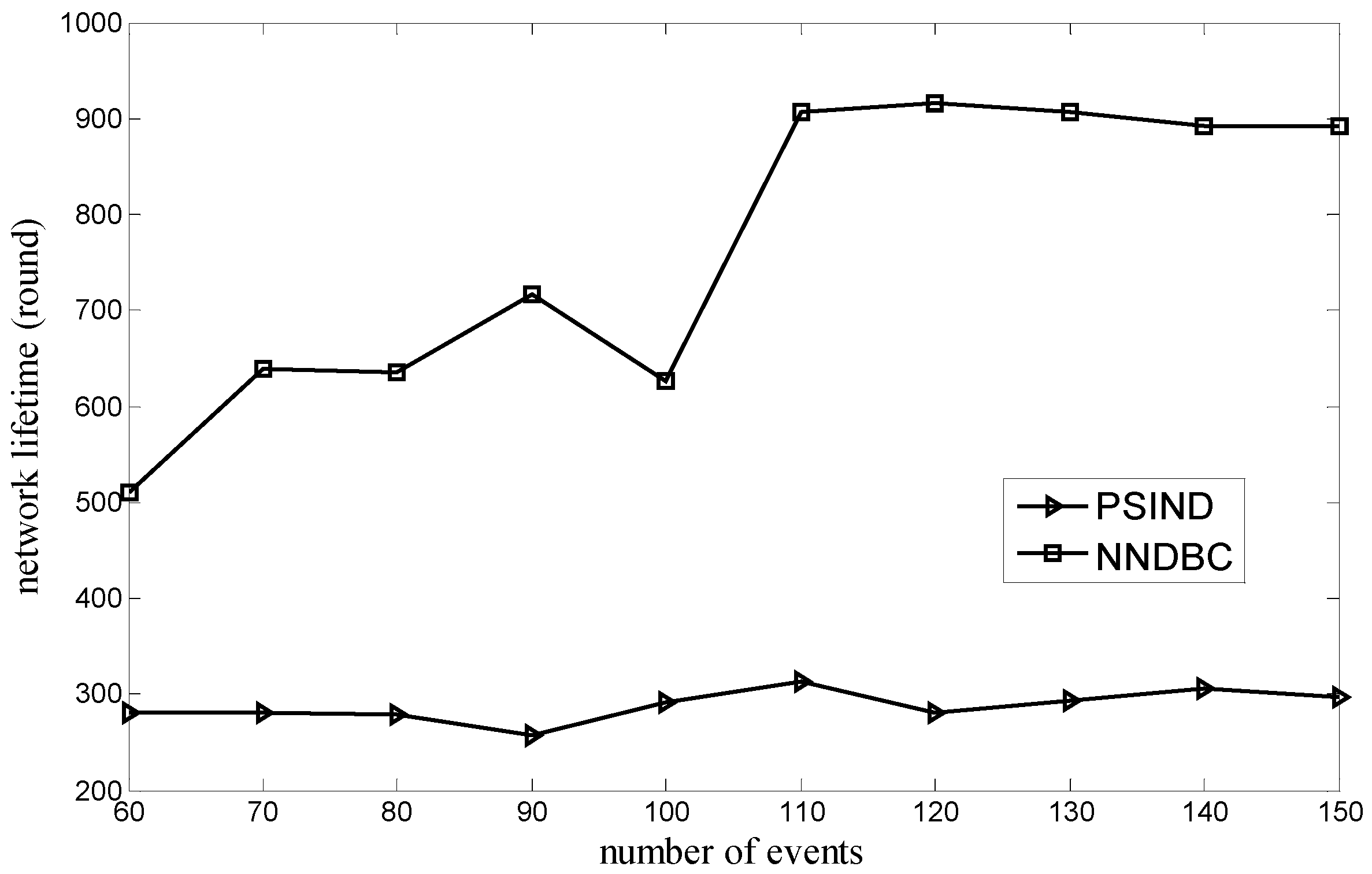
- The concept of aggregate contribution degree is defined, and the nodes with lower aggregate contribution degrees are used to substitute the dying nodes because this can help decrease the number of moving nodes during the deployment and avoid the blind movement of nodes. Consequently, the total movement distance of nodes is decreased, and the network lifetime is prolonged.
2. Preliminaries, Models and Definitions
2.1. Preliminaries
- (1)
- The monitored 3-D underwater space is modelled as a large cube, where the events to be detected are distributed randomly. The number of events is et.
- (2)
- All the nodes can locate themselves with the help of related localization algorithms, such as the hierarchical localization algorithm [15].
- (3)
- All the nodes have the ability to move freely in all directions with the help of related technology, such as autonomous underwater vehicles technology [16]. The moving speed of nodes is sufficiently fast; thus, the moving time of nodes can be neglected.
- (4)
- All the nodes have the same initial energy Eini and the sensing range Rs. The communication ranges of nodes vary from low to high levels, and different levels indicate different communication ranges. A node can adjust its communication level if necessary.
- (5)
- The information packages transmitted among the nodes can be classified into two types, namely, the event and topology information packages. The former information packages are used to store event information. The latter information packages are used to store information that can help form, maintain and optimize the network topology. The size of the event and topology information packages is M.
2.2. Models
2.2.1. Network Clustering Model

2.2.2. Node Energy Consumption Model
2.2.3. Varying Communication Level Model for Maximum Communication Range
2.3. Definitions
2.3.1. Network Coverage Rate
2.3.2. Network Connectivity Rate
2.3.3. Backbone Node
2.3.4. Aggregate Contribution Degree
2.3.5. Network Lifetime
2.3.6. Equivalence Maximum Communication Range
2.3.7. Reconstruction Node Rate
3. Description of Problem and Algorithm
3.1. Problem Description
3.2. Algorithm Description
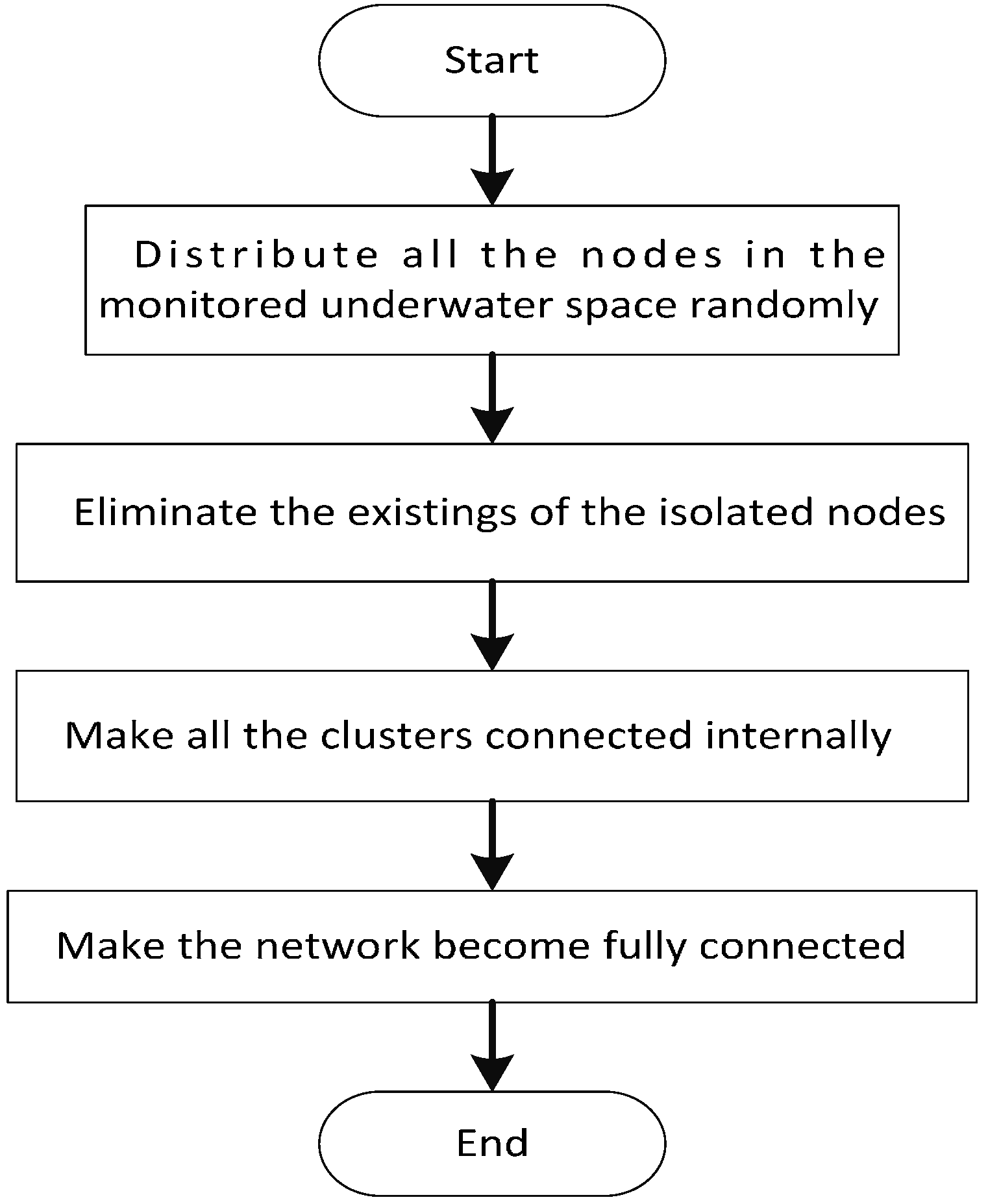
- (1)
- In the monitored underwater space whose volume is V, the sink node is located at the center of the water surface, and the number of events distributed in the space is et. All the nodes adjust their depths randomly to cover as many events as possible after they are scattered (usually scattered by the plane or the ship) on the surface of the underwater space.
- (2)
- The communication levels, i.e., Lev of all the nodes, are initialed to be 1. All the nodes broadcast the neighbor finding messages Mf and attempt to receive that from others. If node i receives the neighbor finding messages Mf from node j, node i changes its communication level to be the same with that of node j, and then node i replies the response message Ma to node j. If node i cannot receive any neighbor finding message Mf, node i is in an isolated state; thus, it gradually increases its communication level one by one while broadcasts its neighbor finding messages Mf. The above process continues until all the nodes receive the response message Ma, that is, there is no isolated node in the network.
- (3)
- All the nodes detect their surrounding events and then, broadcast the cluster forming messages Cs, which includes the information of the number of the events detected. Given that the backbone nodes, which consist of cluster head nodes and several special in-cluster nodes, are prioritized over the non-backbone nodes to be substituted when they are dying to improve the network coverage rate, node i chooses the node that covers the most events from its neighboring nodes (including itself) to be its cluster head node. If more than one neighboring node covers the same maximum number of events, node i chooses the node which is closest to itself as its cluster head node. Each in-cluster node and cluster head node adjusts its communication level to communicate with its cluster head node and in-cluster node, respectively. Each cluster in the network gets internally connected.
- (4)
- After step (3), if the possible isolated cluster is eliminated, the entire network can be evidently connected and achieve full network connectivity. Thus, each cluster head node chooses the closest node which is in other clusters (including the cluster head node and in-cluster node) and is in a shallower (i.e., with the smaller depth) location to be its next-hop during the transmission of messages to the sink node. Each in-cluster node chooses its cluster head node to be its next-hop. Eventually, all the nodes that act as message transmitting nodes form a connected backbone, and the network gets fully connected, and the initial adjustment phase ends.
- (1)
- First, the cluster head node C(i) of node i determines whether any live node whose aggregate contribution degree is smaller than that of node i in its cluster exists. If it exists, the cluster head node C(i) regulates the one that possesses the smallest aggregate contribution degree to help node i, requiring that node to move along the straight line to substitute node i. If the node is absent, then the cluster head node C(i) broadcasts the help-need message Hm to other cluster heads through single-hop or multi-hop.
- (2)
- The cluster head node that has received the help-need message Hm determines whether any live node whose aggregate contribution degree is smaller than that of node i in its cluster exists. If the node exists, the cluster head node responds to the cluster head node C(i) with the help-give message Gm, revealing the nodes that can offer help to C(i). If the cluster head node C(i) can receive the help-give message Gm (which may be more than one), it chooses the closest node h that can offer help and transmits the request message Rm to the cluster head node C(h) of node h. After receiving the request message Rm, the cluster head node C(h) requires the node h to move along the straight line to substitute node i. If the cluster head node C(i) cannot receive any Gm, the node i cannot be substituted by any node.

4. Simulation Evaluation
4.1. Algorithm Comparison and Evaluation Metrics
4.2. Simulation Scenario and Parameter Settings

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Names | Parameter Values |
|---|---|
| Initial energy of node (Ei) | 1000 J |
| Node energy threshold (Eth) | 10 J |
| Network coverage rate threshold (Cth) | 0.1 |
| Energy consumption per movement distance (mu) | 1.5 J/m |
| Size of information package (Mb) | 1 Kbit |
| Power threshold (Pr) | 0.05 w |
| Frequency of carrier acoustic signal (f) | 25 kHz |
| Transmission speed of information package (Sv) | 5 kbps |
| Energy spreading factor (λ) | 1.5 |
| Sensing range of node (Rs) | 15 m |
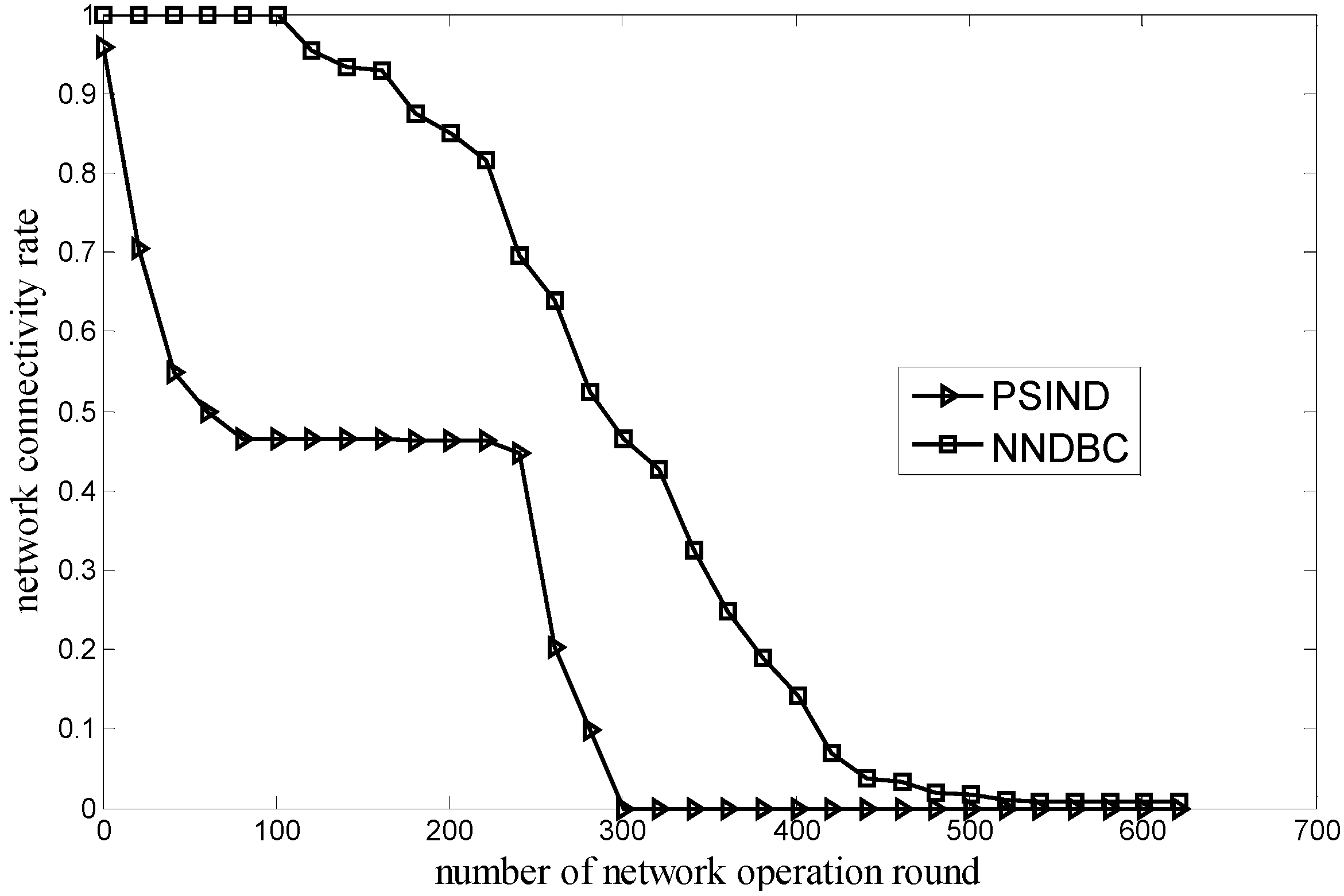
4.3. Simulation Results and Analyze






5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Heidemann, J.; Stojanovic, M.; Zorzi, M. Underwater sensor networks: Applications, advances and challenges. Philos. Trans. R. Soc. A 2012, 370, 158–175. [Google Scholar] [CrossRef] [PubMed]
- Han, G.J.; Zhang, C.Y.; Shu, L.; Sun, L.; Li, Q.W. A survey on deployment algorithms in underwater acoustic sensor networks. Int. J. Distrib. Sens. Netw. 2013, 2013. [Google Scholar] [CrossRef]
- Aitsaadi, N.; Achir, N.; Boussetta, K.; Pujolle, G. Differentiated underwater sensor network deployment. In Proceedings of the IEEE International Conference on OCEANS, Aberdeen, UK, 18–21 June 2007; pp. 1–6.
- Golen, E.F.; Mishra, S.; Shenoy, N. An underwater sensor allocation scheme for a range dependent environment. Comput. Netw. 2010, 54, 404–415. [Google Scholar] [CrossRef]
- Xia, N.; Wang, C.S.; Zheng, R.; Jiang, J.G. Fish swarm inspired underwater sensor deployment. Acta Autom. Sin. 2012, 38, 295–302. [Google Scholar] [CrossRef]
- Du, H.Z.; Xia, N.; Zheng, R. Particle swarm inspired underwater sensor self-deployment. Sensors 2014, 14, 15262–15281. [Google Scholar] [CrossRef] [PubMed]
- Mehmood, A.; Khan, S.; Shams, B.; Lloret, J. Energy-Efficient Multi-Level and Distance-Aware Clustering Mechanism for WSNs. Int. J. Commun. Syst. 2015, 28, 972–989. [Google Scholar] [CrossRef]
- Mehmood, A.; Lloret, J.; Noman, M.; Song, H. Improvement of the Wireless Sensor Network Lifetime using LEACH with Vice-Cluster Head. Ad Hoc Sens. Wirel. Netw. 2015, 28, 1–17. [Google Scholar]
- Ma, S.Q.; Guo, Y.C.; Lei, M.; Yang, Y.; Cheng, M.Z. A Cluster Head Selection Framework in Wireless Sensor Networks Considering Trust and Residual Energy. Ad Hoc Sens. Wirel. Netw. 2015, 25, 147–164. [Google Scholar]
- Guo, W.Z.; Chen, G.L.; Yu, C.L.; Su, J.S.; Liu, Z.H. A Two-Stage Clustering Sleep Scheduling Algorithm with Particle Swarm Optimization in Wireless Sensor Networks. Ad Hoc Sens. Wirel. Netw. 2015, 27, 27–49. [Google Scholar]
- Abbasi, A.A.; Younis, M. A survey on clustering algorithms for wireless sensor networks. Comput. Commun. 2007, 30, 2826–2841. [Google Scholar] [CrossRef]
- Lloret, J.; Garcia, M.; Bri, D.; Diaz, J.R. A cluster-based architecture to structure the topology of parallel wireless sensor networks. Sensors 2009, 9, 10513–10544. [Google Scholar] [CrossRef] [PubMed]
- Tsai, M.H.; Huang, Y.M. A sub-clustering algorithm based on spatial data correlation for energy conservation in wireless sensor networks. Sensors 2014, 14, 21858–21871. [Google Scholar] [CrossRef] [PubMed]
- Han, G.J.; Qian, A.H.; Zhang, C.Y.; Wang, Y.; Rodregues, J. Localization algorithms in large-scale underwater sensor networks: A quantitative comparison. Int. J. Distrib. Sens. Netw. 2014, 2014. [Google Scholar] [CrossRef]
- Wynn, R.B.; Huvenne, V.A.I.; le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous underwater vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef] [Green Version]
- Partan, J.; Kurose, J.; Levine, B.N. A survey of practical issues in underwater networks. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2007, 11, 23–33. [Google Scholar] [CrossRef]
- Wang, P.; Li, C.; Zheng, J.; Mouftah, H.T. A dependable clustering protocol for survivable underwater sensor networks. In Proceedings of the IEEE International Conference on Communications, Beijing, China, 19–23 May 2008; pp. 3263–3268.
- Sozer, E.M.; Stojanovic, M.; Proakis, J.G. Underwater acoustic networks. IEEE J. Ocean. Eng. 2000, 25, 72–83. [Google Scholar] [CrossRef]
- Senel, F.; Akkaya, K.; Erol-Kantarci, M.; Yilmaz, T. Self-deployment of mobile underwater acoustic sensor networks for maximized coverage and guaranteed connectivity. Ad Hoc Netw. 2014. [Google Scholar] [CrossRef]
- Keskin, M.; Altinel, I.K.; Aras, N.; Ersoy, C. Wireless sensor network lifetime maximization by optimal sensor deployment, activity scheduling, data routing and sink mobility. Ad Hoc Netw. 2014, 17, 18–36. [Google Scholar] [CrossRef]
- Bahi, J.; Haddad, M.; Hakem, M.; Kheddouci, H. Efficient distributed lifetime optimization algorithm for sensor networks. Ad Hoc Netw. 2014, 16, 1–12. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, P.; Liu, J.; Wu, F. Node Non-Uniform Deployment Based on Clustering Algorithm for Underwater Sensor Networks. Sensors 2015, 15, 29997-30010. https://doi.org/10.3390/s151229786
Jiang P, Liu J, Wu F. Node Non-Uniform Deployment Based on Clustering Algorithm for Underwater Sensor Networks. Sensors. 2015; 15(12):29997-30010. https://doi.org/10.3390/s151229786
Chicago/Turabian StyleJiang, Peng, Jun Liu, and Feng Wu. 2015. "Node Non-Uniform Deployment Based on Clustering Algorithm for Underwater Sensor Networks" Sensors 15, no. 12: 29997-30010. https://doi.org/10.3390/s151229786
APA StyleJiang, P., Liu, J., & Wu, F. (2015). Node Non-Uniform Deployment Based on Clustering Algorithm for Underwater Sensor Networks. Sensors, 15(12), 29997-30010. https://doi.org/10.3390/s151229786