1. Introduction
A Frequency modulated continuous wave (FMCW) radar constantly transmits and receives signals and is thus capable of maintaining a high signal to noise ratio with much less peak power than a corresponding pulse radar system. This working principle is readily compatible with the modern solid state devices and hence can greatly decrease the cost and volume of the FMCW radar system. The FMCW technique has recently been used in high resolution synthetic aperture radar (SAR). Several experimental systems have been reported [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10].
One limitation of FMCW SAR is the operation distance. Because of the continuous working manner of the FMCW SAR, the energy will leak directly from the transmitter to receiver, which limits the radar standoff range. By separating the transmitting and receiving antennas, a better isolation up to 60 dB [
11] could be reached. However, the operation range of FMCW SAR is still limited to several kilometers because the compact size of a monostatic FMCW SAR does not allow much space separation between the transmitting and receiving antennas. Therefore, the transmitted power of a monostatic FMCW SAR is normally limited to several watts even though the devices can handle more.
Bistatic configuration provides a possibility to significantly increase the antennas space isolation while still keeping the small size of the radar. The two-dimensional spectrum of bistatic FMCW SAR has been researched in [
12,
13]. In [
12], an approximated slant range equation is used to express the demodulated signal. The spectrum is then obtained by treating the azimuth frequency as two parts caused by transmitter and receiver separately. Liu
et al. [
13] uses a more accurate slant range approximation which considers the moving of the receiver during the wave propagation. Two separated square roots are obtained in the two-dimensional spectrum due to the consideration of the separately introduced azimuth Doppler frequency by transmitter and receiver.
The main difficulty of pulse bistatic SAR imaging comes from the dual square roots form of the instantaneous slant range, which changes the range equation from the hyperbola to a flattop hyperbola [
14] and thus invalidated most pulse SAR imaging algorithms. The situation is complicated in the FMCW bistatic case by the long duration of the FMCW signal. The in-chirp Doppler problem in monostatic FMCW SAR is proposed in [
15], but the situation is more complex in bistatic FMCW SAR due to the dual square roots.
In this paper, the Fresnel approximation [
16] is used to approximate the dual square roots in bistatic FMCW case to a single monostatic-like square root so that the existing imaging ideas in FMCW SAR processing could be applied to bistatic FMCW SAR.
The other contribution of this paper is a modified range migration algorithm (RMA) for FMCW SAR signal processing. RMA [
17,
18] is a widely used SAR imaging algorithm well accepted as one of the most accurate SAR imaging algorithms. The original RMA is from seismic processing and then applied [
17,
18] and extended [
19] in pulse SAR image processing. The RMA is introduced into FMCW SAR in [
20] by using a more accurate slant range expression. The RMA is one of the preferred algorithms in FMCW SAR processing because the dechirp-on-receive [
21] readily brings the raw data to the equivalent range frequency domain, which reduces one range Fourier transform (FT). Moreover, due to the special signal characteristics of the FMCW SAR, the application of RMA could be made more efficient by using a modified RMA introduced in this paper. The modified RMA is proposed based on the novel monostatic-like spectrum obtained by using Fresnel approximation. It reduces the data size needed in the traditional RMA, which improves the processing speed and reduces the memory needed. The modified RMA also generates better images than the traditional RMA if the same size of data is used. The proposed RMA is also effective in monostatic FMCW SAR signal processing.
One drawback of the RMA (both the proposed RMA and the traditional RMA) is that it is sensitive to the motion error of the platform. The motion error introduced to the raw data will also be modified by the Stolt mapping, which causes difficulties for the motion compensation. The related research about motion compensation in RMA can be found in [
22,
23].
The paper is organized as follows. The FMCW principle is first analyzed in
Section 2, which provides one basis for the modified RMA. In
Section 3, the monostatic-like spectrum for bistatic FMCW SAR is derived by using Fresnel approximation.
Section 4 proposes the modified RMA based on the spectrum obtained in
Section 3.
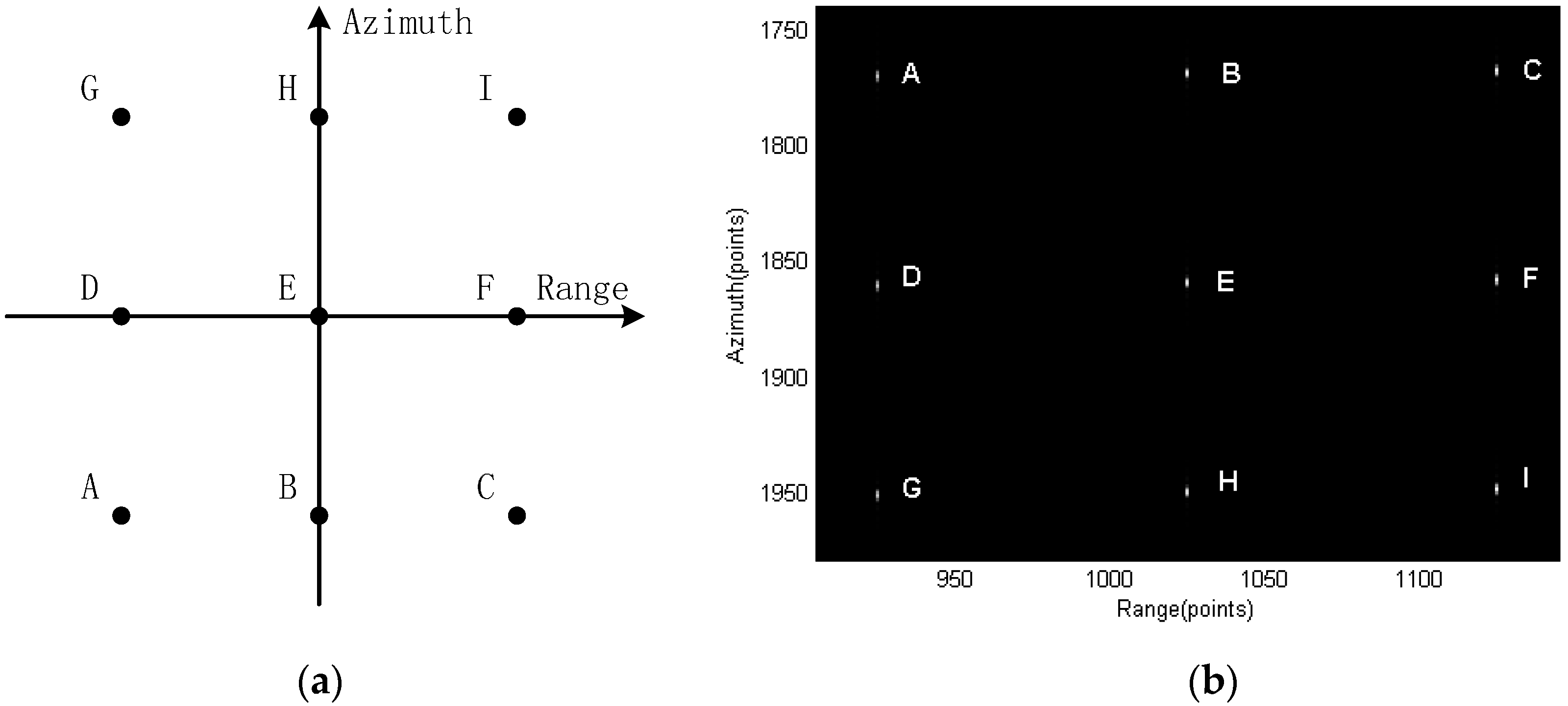
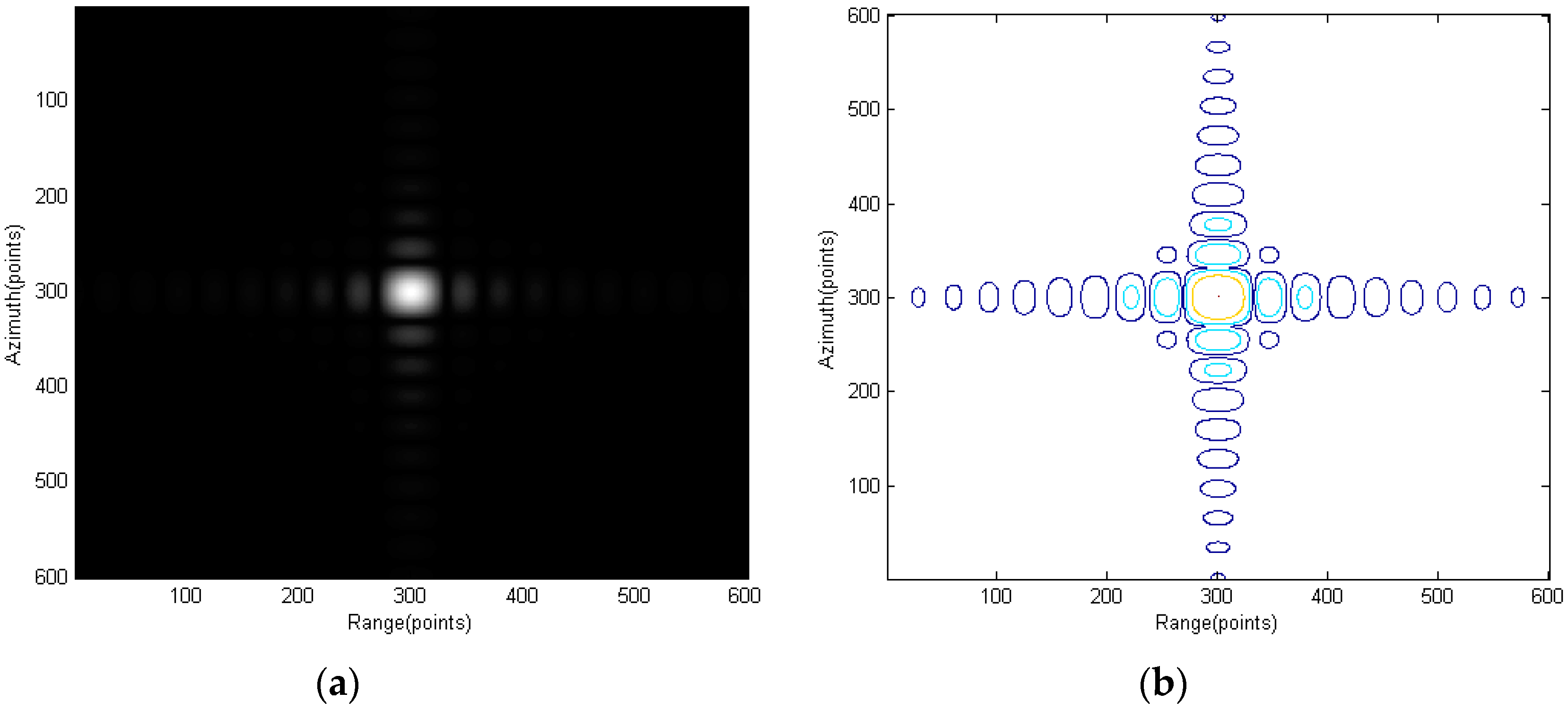
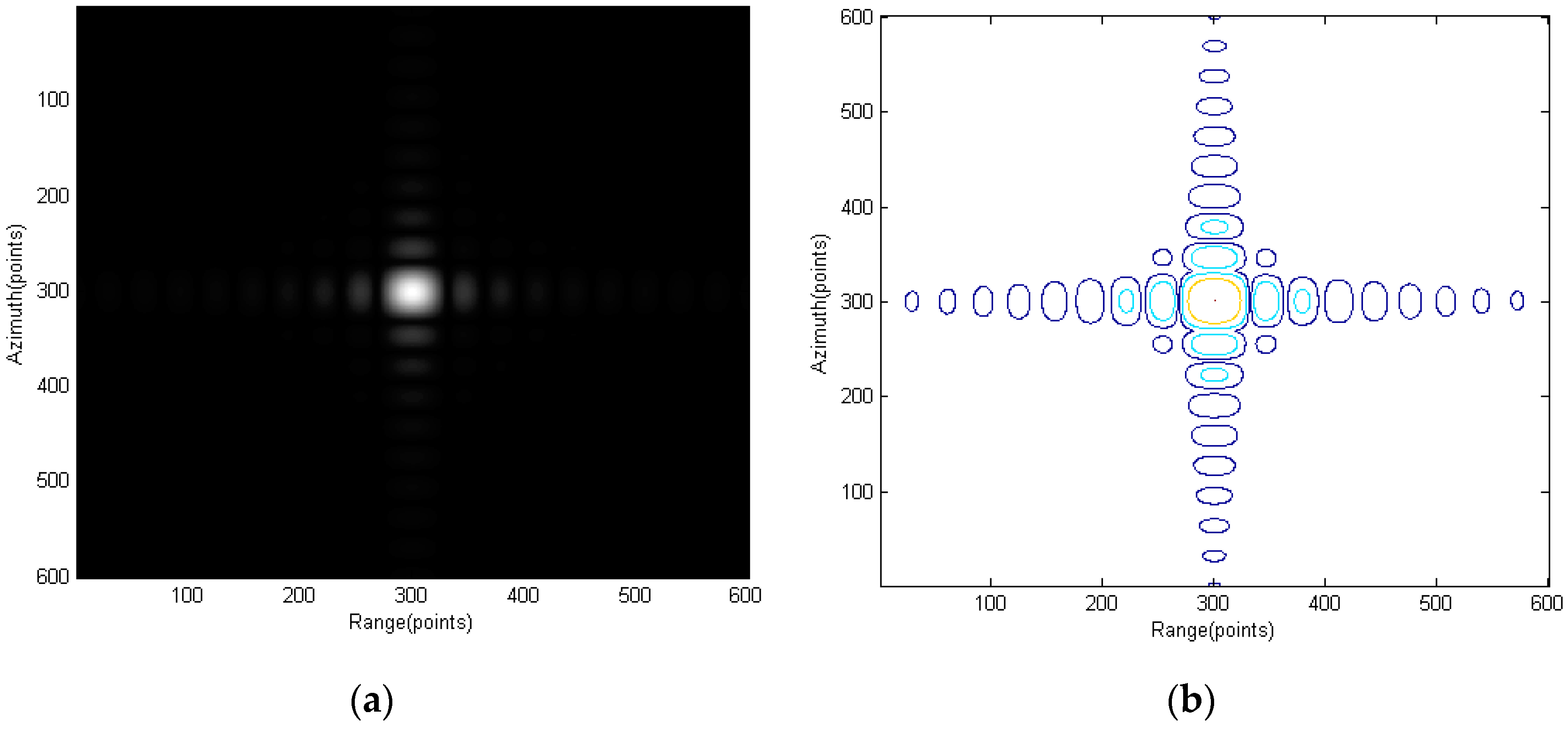
Section 5 first uses point-target simulation to verify the proposed spectrum and the modified RMA. Real data are then used to verify the proposed RMA on monostatic FMCW SAR signal processing.
Section 6 gives the conclusion.
2. FMCW Principle
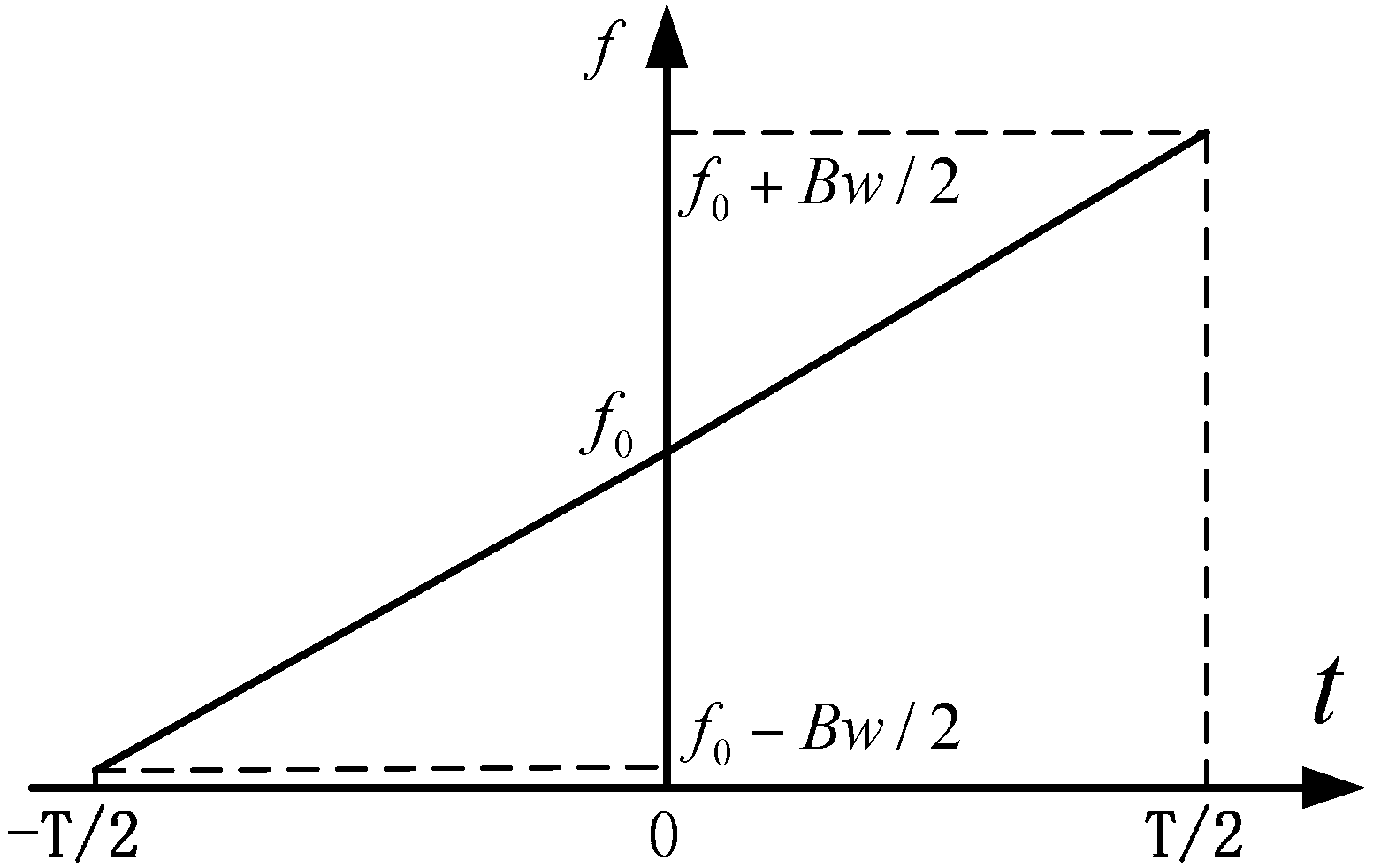
Figure 1 shows the time frequency plot of a sawtooth modulated FMCW signal, which could be expressed as
where
is the rectangular function. The period of the signal is T, the center frequency is
, the bandwidth is Bw and
is the frequency modulation (FM) rate. The received echo is a time delayed version of Equation (1), which is
where
(
is the target distance and c is the speed of light) is the two-way time delay of the signal. Considering the speed of light is very large and the distance is normally less than tens of kilometers, the time delay is very small and can be neglected in the rectangular function but only considered in phase [
24]. The received signal in Equation (3) is then mixed with the transmitted signal in Equation (1) to generate the intermediate frequency (IF) signal, which is expressed as
Figure 1.
Time frequency plot of a sawtooth sweep chirp.
Figure 1.
Time frequency plot of a sawtooth sweep chirp.
The FT of Equation (4) then gives the distance measurement, which is
where
. Equation (5) implies that the FT result of the IF signal is a peak located at
Hz. If the analog to digital converter (ADC) samples the IF signal during the whole duration of T, then each point in the digital frequency domain represents
Hz. Therefore, the center of the sinc function will be located at
where
is the range resolution of the signal. Equation (6) shows that the change of a distance equaling to the radar resolution will cause one point shift of the sinc function in the discrete frequency domain.
The 3 dB width of the sinc function shown in Equation (5) equals the reciprocal of the coefficient of the variable
[
25], which is
Therefore, the resolution of the IF signal after dechirp-on-receive is totally determined by the length of the signal providing that the original signal before demodulation is continuous in this length.
3. Two-Dimensional Spectrum of Bistatic FMCW SAR Based on Fresnel Approximation
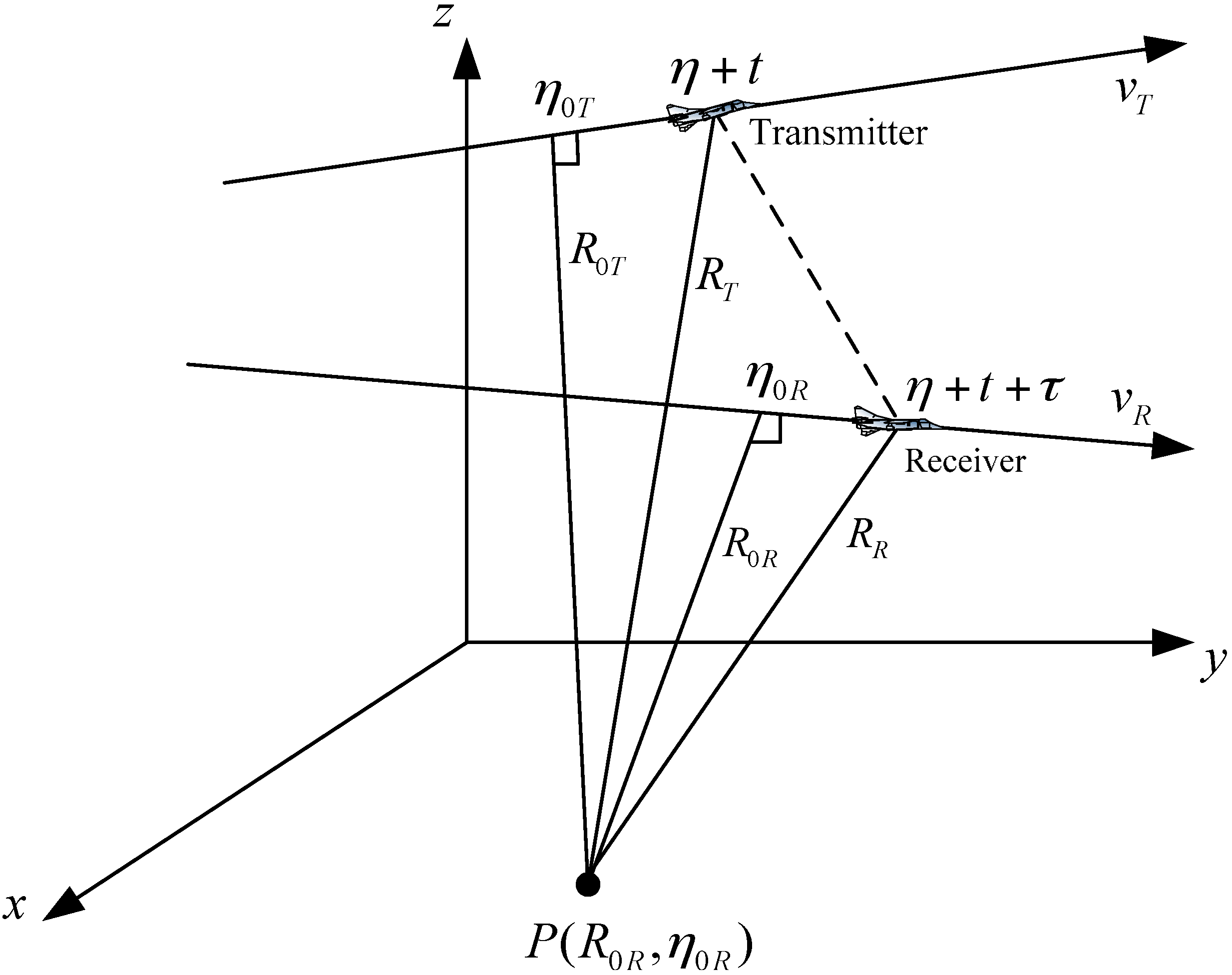
The geometry of the general bistatic FMCW SAR is shown in
Figure 2.
is a point target in the imaging scene. The transmitter moves with a constant speed
, and the receiver moves with speed
. The closet approach between transmitter and target is
(closest approach range) occurring at
(closest approach time), and is
between the receiver and the target when
, where
is azimuth time (slow time). Due to the longer pulse duration in FMCW SAR, the traditional stop-and-go assumption is no longer a good approximation, and the movement of the aircrafts inside the pulse needs to be considered [
15,
26]. Therefore, in
Figure 2, the transmitter begins to transmit a certain frequency at time
, where
is the fast time. After time
, the transmitted wave arrives at the receiver. Therefore, the total time used for the propagation is
Figure 2.
Geometry of bistatic frequency modulated continuous wave (FMCW) synthetic aperture radar (SAR).
Figure 2.
Geometry of bistatic frequency modulated continuous wave (FMCW) synthetic aperture radar (SAR).
A good approximation that keeps the two square roots in Equation (8) symmetric is to neglect
in the first square root on the right hand side of Equation (8), which means neglecting the movement of the receiver during the propagation of the transmitted wave. The error of this neglecting is normally a few millimeters in airborne applications [
27], which is valid for most airborne SAR cases. A more accurate approximation for the slant range is found in [
13]. The slant range after approximation is
By first squaring
of Equation (9) we have
For long range operation and narrow antenna beamwidth, we have
and
, thus the last term in the square root of Equation (10) can be neglected. Applying the Fresnel approximation [
16] to the square root and then taking the square root of both sides of Equation (10) (
is always positive), we obtain Equation (11) after some manipulations.
where
,
and
are the equivalent closest approach, velocity and azimuth Doppler center in the new range expression, respectively. Note that
is a function of range in the new model, which is different from the normal airborne SAR cases. Equation (11) is very similar to the monostatic instantaneous slant range expression [
27,
28] except the last term inside the square root, which is caused by the bistatic configuration. Using the new monostatic-like expression, the two-way propagation delay can now be expressed as
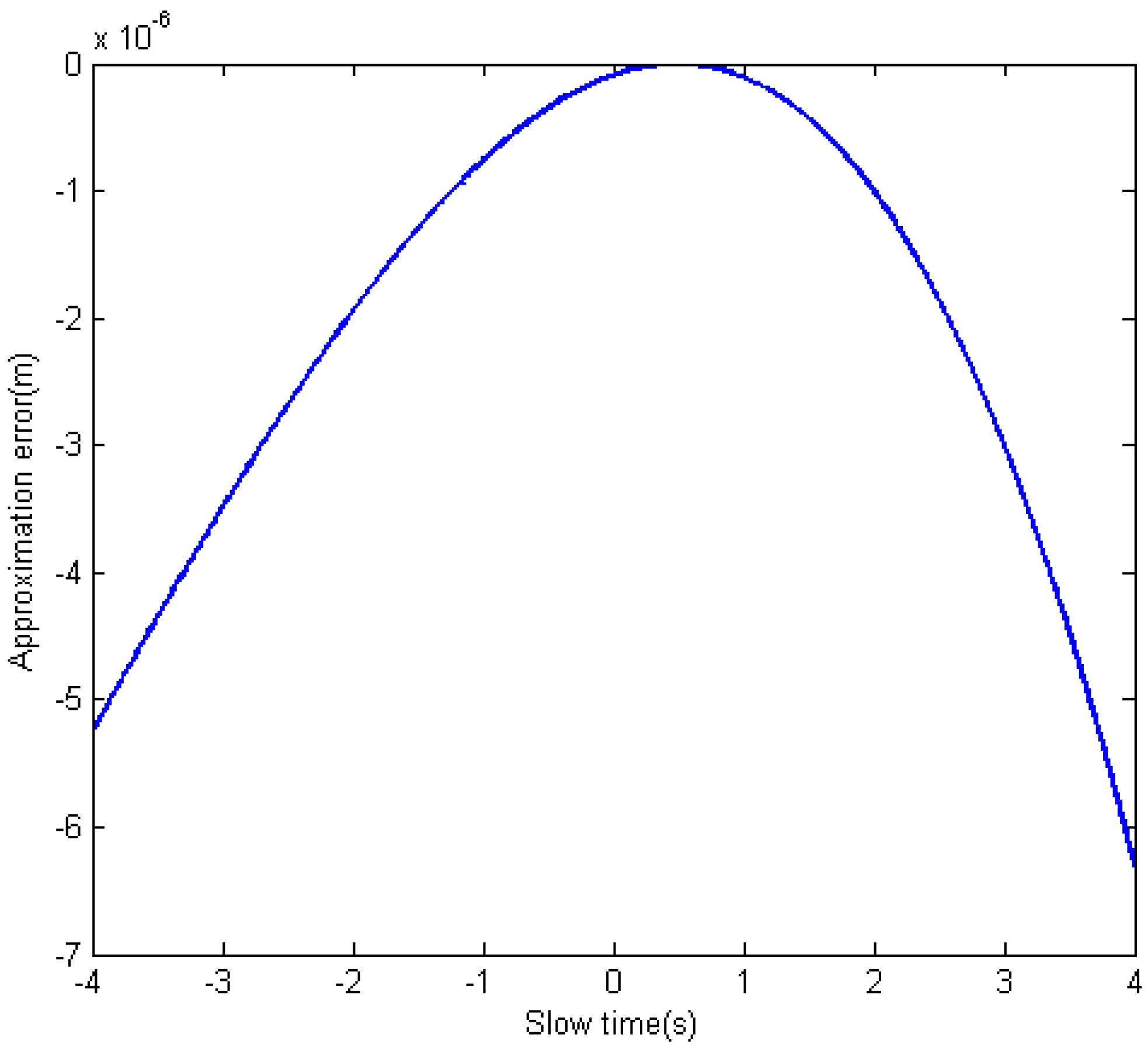
Figure 3 shows the approximation error when using the Equation (11) to express the original slant range Equation (9). The parameters are shown in
Table 1 for a normal FMCW bistatic SAR configuration in which
and
are satisfied.
Table 1.
Parameters for approximation error calculation.
Table 1.
Parameters for approximation error calculation.
| Parameter | Value | Unit |
|---|
| Closest range from receiver to target | 16 | km |
| Closest range from transmitter to target | 20 | km |
| Receiver speed | 50 | m/s |
| Transmitter speed | 60 | m/s |
| Closest approach time of receiver | 0 | s |
| Closest approach time of transmitter | 1 | s |
| Fast time | 2 | ms |
As shown in
Figure 3, the maximum approximation error is about
m, which will only introduce
rad phase error when the center frequency of the transmitted signal is 30 GHz. This phase error is very small and can be neglected. The phase error will be smaller when the center frequency is lower.
Figure 3.
Slant range approximation error.
Figure 3.
Slant range approximation error.
The IF signal of the bistatic FMCW SAR after dechirp-on-receive demodulation can be expressed by modifying Equation (4) as
where
is the reflection coefficient. The last exponential term is known as the residual video phase (RVP), and is normally removed before imaging process. A method that removes RVP is given in [
21]. This term is assumed to be removed and will not be included in the following derivation.
Because of the characteristics of the chirp signal, the dechirp-on-receive process has readily brought the signal into the range spectrum domain, hence only one azimuth FT is needed to obtain the two-dimensional spectrum. Perform FT about
in Equation (14), we have
where
Principle of stationary phase [
21,
25] can be used at this stage to find the azimuth phase stationary point. By solving
, we have
Then the integral in Equation (15) could be approximated and the two-dimensional spectrum can be expressed as
where
and
The first term in Equation (19) is the equivalent bistatic FMCW SAR square root term. A closer view of the phase shown in Equation (19) could help to understand the major components and the physical interpretation of the equivalent monostatic phase. By expanding the square root of Equation (19) about range time t using Taylor expansion and after some manipulations, we have
where
represents the cosine of the instantaneous incidence angle of the receiver.
in Equation (21) represents the higher order terms in Taylor expansion. The first term in the square brackets of Equation (21) represents the azimuth modulation. The second term in brackets is the linear function of fast time, which shifts the range sinc function after range FT and represents the azimuth frequency varied range cell migration (RCM). The third term in brackets is the major range-azimuth coupling term, which is normally mentioned as the secondary range compression (SRC) term. The higher order terms are also caused by the range-azimuth coupling and are normally very small in most airborne SAR configurations. However, they could affect the image quality in some extreme cases [
27], when they need to be considered and eliminated. It is also the reason that RMA is considered to be a very accurate imaging algorithm because it does not make any approximation to the square root of Equation (19). The second last term is an additional RCM cause by the moving of the radar inside the pulse. The last term is caused by the target’s azimuth position.
4. Modified RMA Based on the Bistatic Equivalent Spectrum
The modified RMA follows the traditional RMA steps. The first step is the reference function multiplication (RFM), which focuses the point in the reference range (normally chosen to be the center of the imaging scene). This reference function is
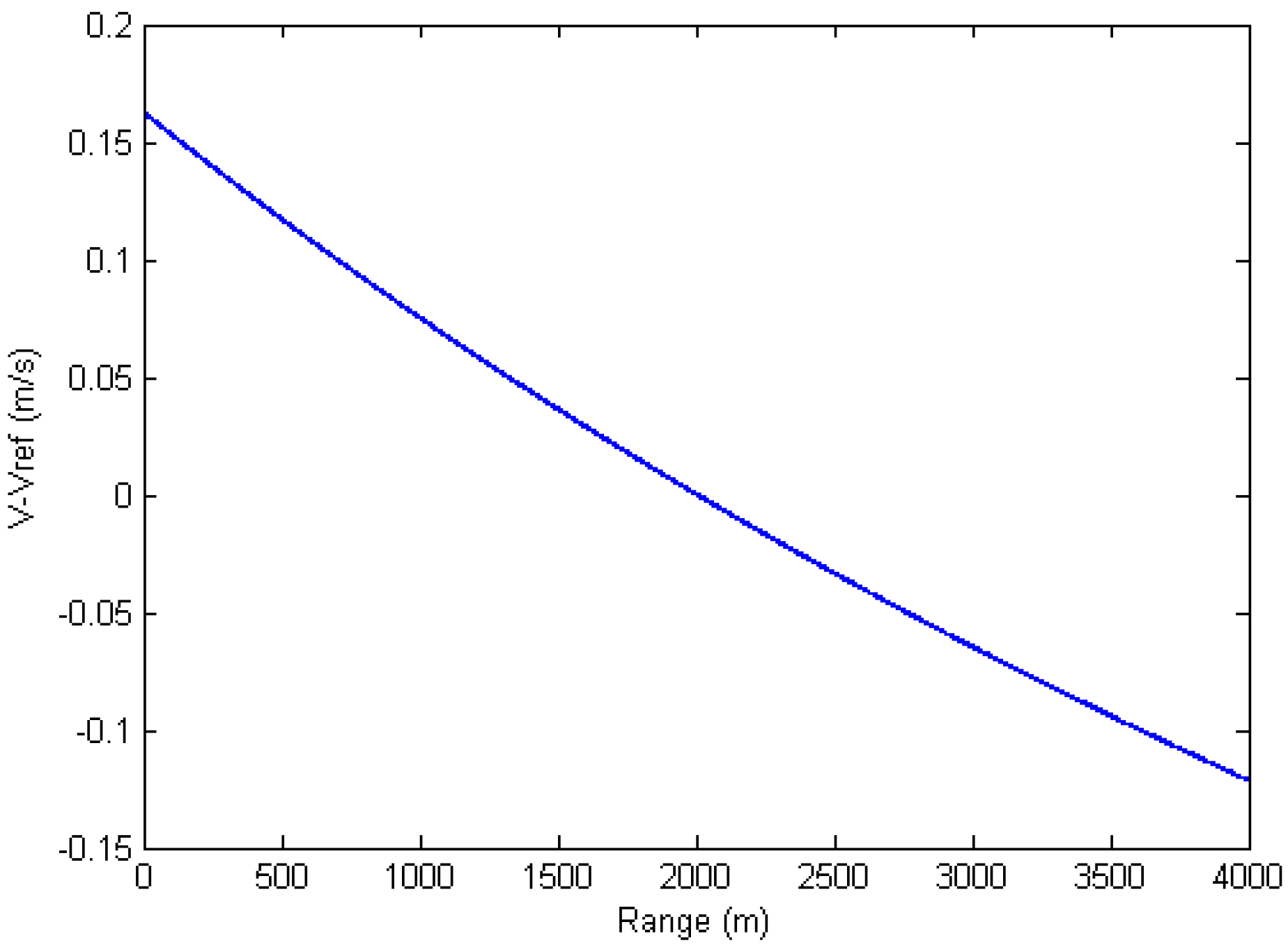
As shown by Equation (12), the equivalent bistatic velocity varies with range. Therefore, a reference velocity needs to be used in this step. The approximation made in this step is to assume the equivalent bistatic velocity to be the same at all ranges. This is a reasonable approximation because the velocity varies very slowly in long range imaging.
Figure 4 shows the speed approximation error using the parameters shown in
Table 2. Horizontal axis is the range from the closest edge of the imaging scene.
Table 2.
Parameters for velocity error calculation.
Table 2.
Parameters for velocity error calculation.
| Parameter | Value | Unit |
|---|
| Closest range from receiver to scene center | 16 | km |
| Closest range from transmitter to scene center | 20 | km |
| Receiver speed | 50 | m/s |
| Transmitter speed | 60 | m/s |
Figure 4 shows that the maximum speed error occurs at the closest edge of the scene, which is a little above 0.15 m/s. The reference velocity used here is 56.1 m/s, thus the maximum speed approximation error is only 0.29% of the reference velocity, which could be neglected.
Figure 4.
Velocity approximation error.
Figure 4.
Velocity approximation error.
The second step is the change of variables, which is
where
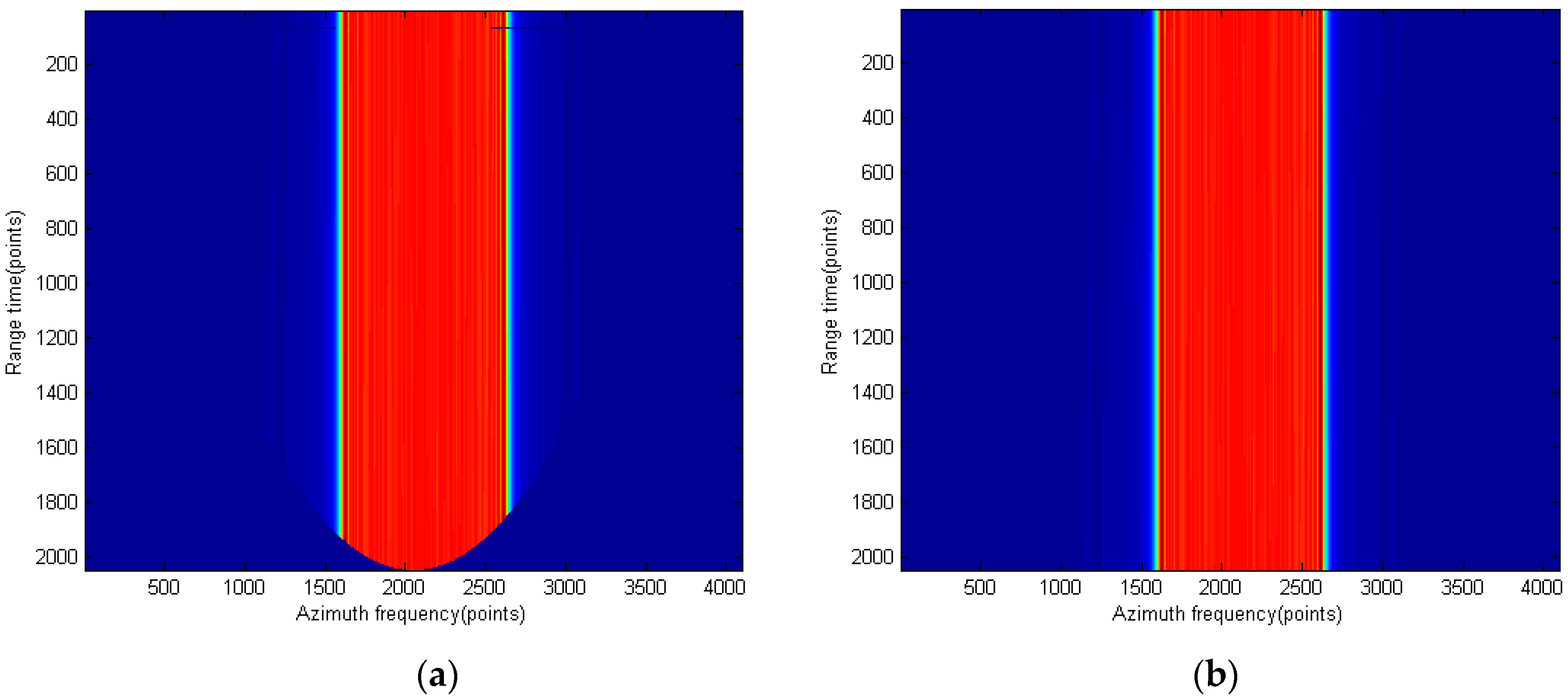
is the new variable of time. This step is also known as the Stolt mapping, which means a re-mapping of the time axis. If we Taylor expand the square root in Equation (24) and take the first two terms of the series, we have
The first term on the right side of Equation (25) is an azimuth frequency varied time shift, which is the major change of the time variable, and the second term is the scaling of time. Since
is always less than 1, the change of variable always corresponds to an expansion of the data size in time direction. This expansion could be very large when
is significantly smaller than 1, which could dramatically increase the computational load for interpolation and the memory used for calculation. Moreover, the decrease of focus quality occurs as the change in the value of the variable increases [
28].
The modification of the RMA to decrease the calculation load and improve the image quality takes two steps.
The first step is to modify the mapping formula. Instead of the variable change of Equation (24), the following mapping is used
By making the variable change in Equation (26), the first term on the right side of Equation (25) vanishes, and the mapping only includes the scaling of the time variable. This mapping eliminates the skew of the spectrum caused by parallel time shift. Similar but different variable changes are used in [
19,
28]. As this Stolt mapping performs all the functions of the traditional one except the azimuth compression, the azimuth modulation needs to be removed after range FT.
The second step to simplify the RMA is by noticing that the resolution of the IF signal after dechirp-on-receive is only determined by the signal time duration (see
Section 2). Therefore, there is no need to perform the whole modified Stolt mapping. The new variable only needs to be limited in the same range of the old time variable, which is
By employing the above two modifications in the Stolt mapping, the data size during the mapping can be kept constant, which is important for the low cost FMCW SAR processing.
After the first two steps of the RMA, the signal can be expressed as
in which the range and azimuth variables have been successfully separated. The range FT is then performed and the following term is multiplied to finish the azimuth compression
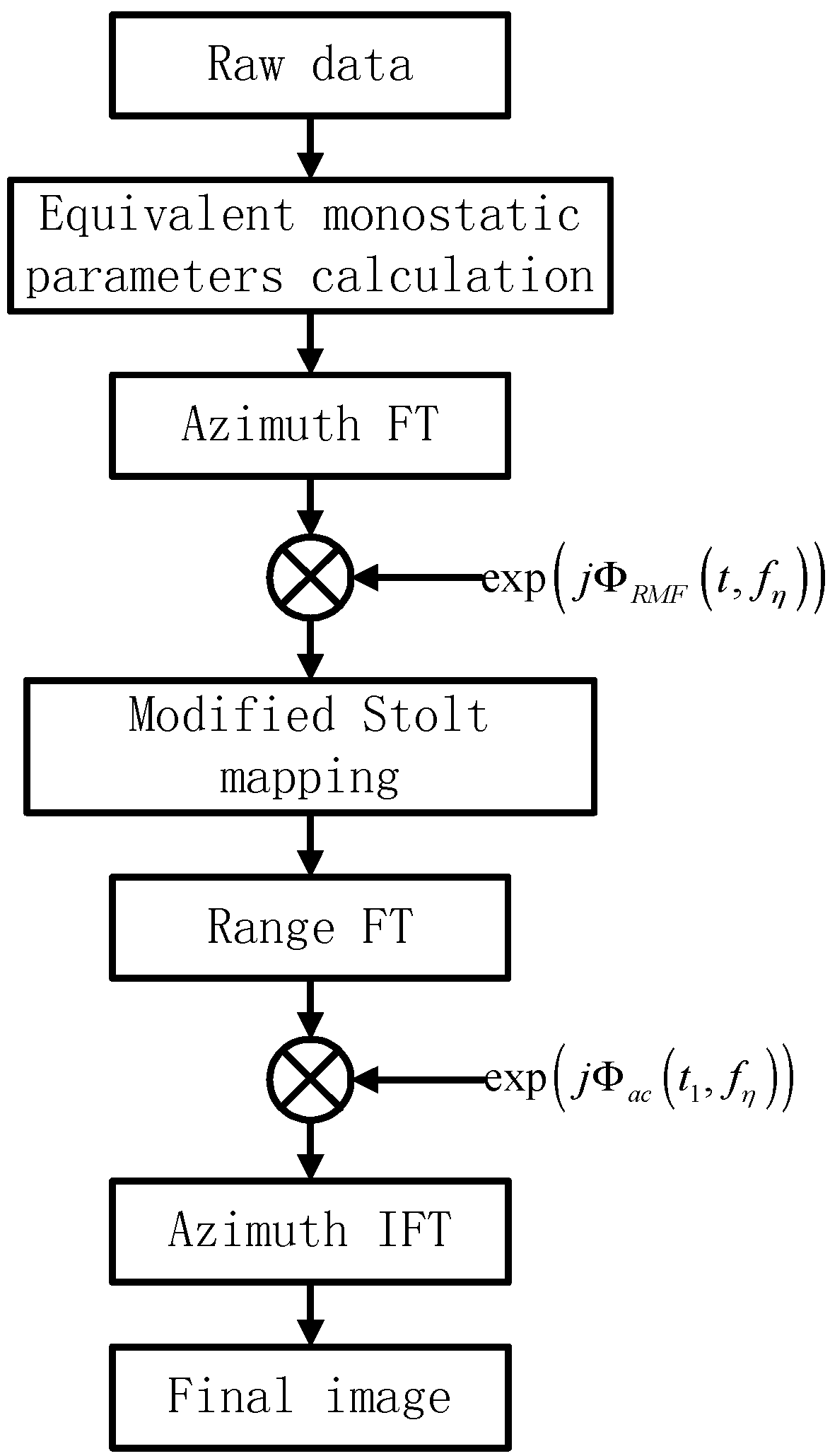
Then an azimuth IFT finishes the image processing. The whole flow diagram of the bistatic FMCW SAR image processing is shown in
Figure 5.
As shown in
Figure 5, two phase multiplications and three FT/IFT are needed to finish the processing.
Figure 5.
Bistatic FMCW SAR image processing flow diagram.
Figure 5.
Bistatic FMCW SAR image processing flow diagram.
6. Conclusions
The combination of FMCW SAR and bistatic configuration makes good significance because it provides a reasonable way to solve the intrinsic drawback of FMCW SAR. This paper first proposed a two-dimensional spectrum model for bistatic FMCW SAR based on Fresnel approximation and then proposed a modified RMA for processing the FMCW SAR data.
The advantage of the proposed spectrum model is that it is very similar to the monostatic FMCW SAR spectrum and thus the existing FMCW SAR imaging algorithms can be used to process bistatic FMCW SAR image. The given spectrum model is accurate under small squint and long range SAR working conditions.
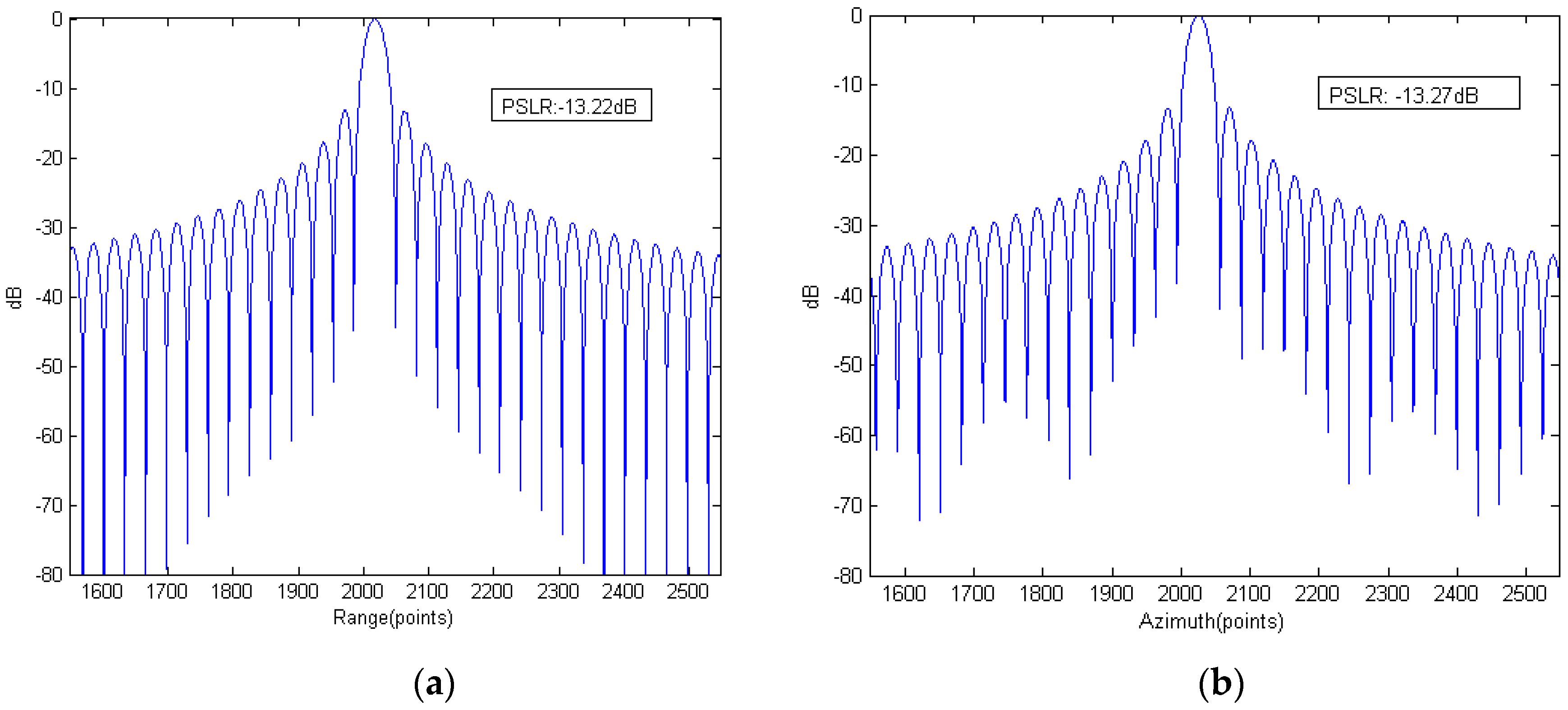
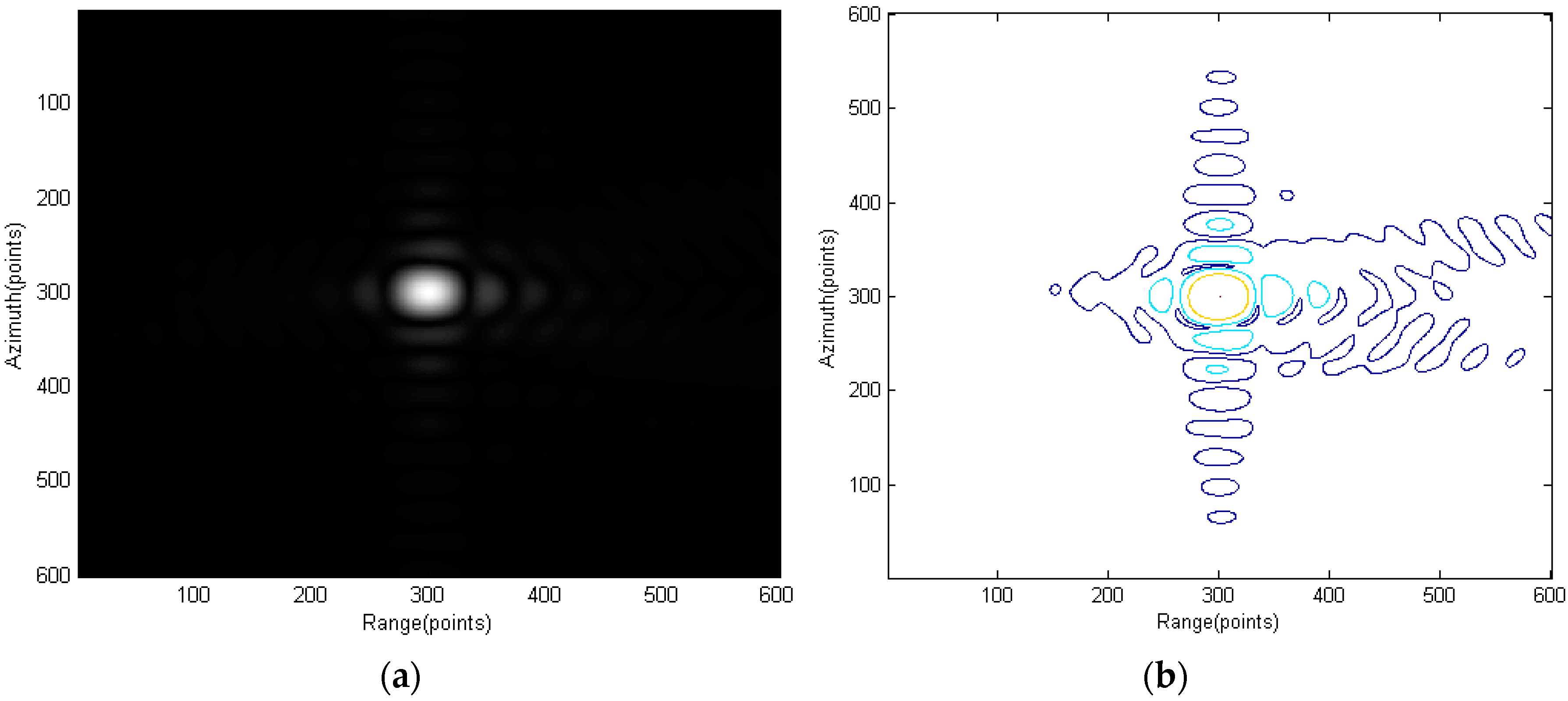
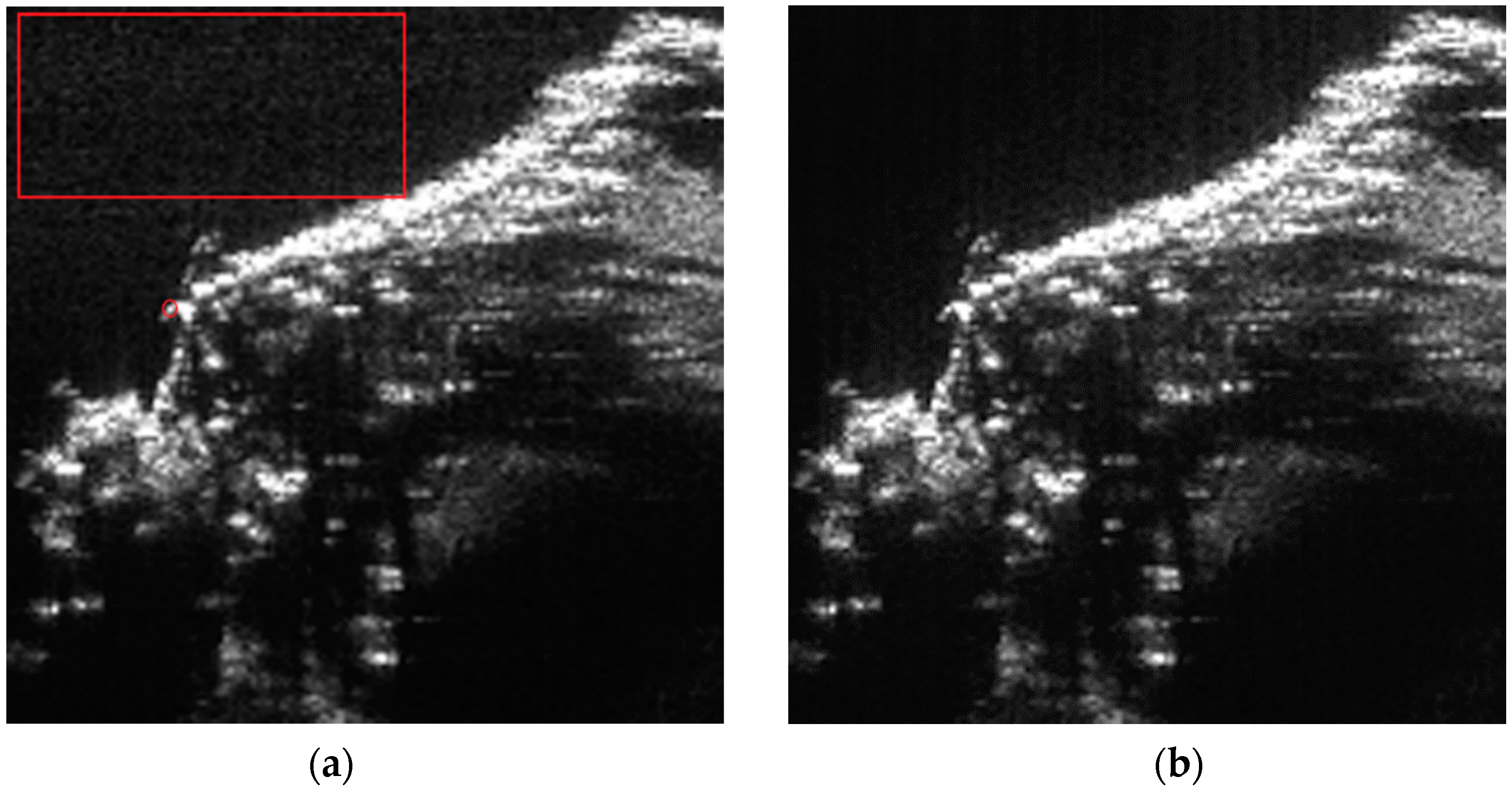
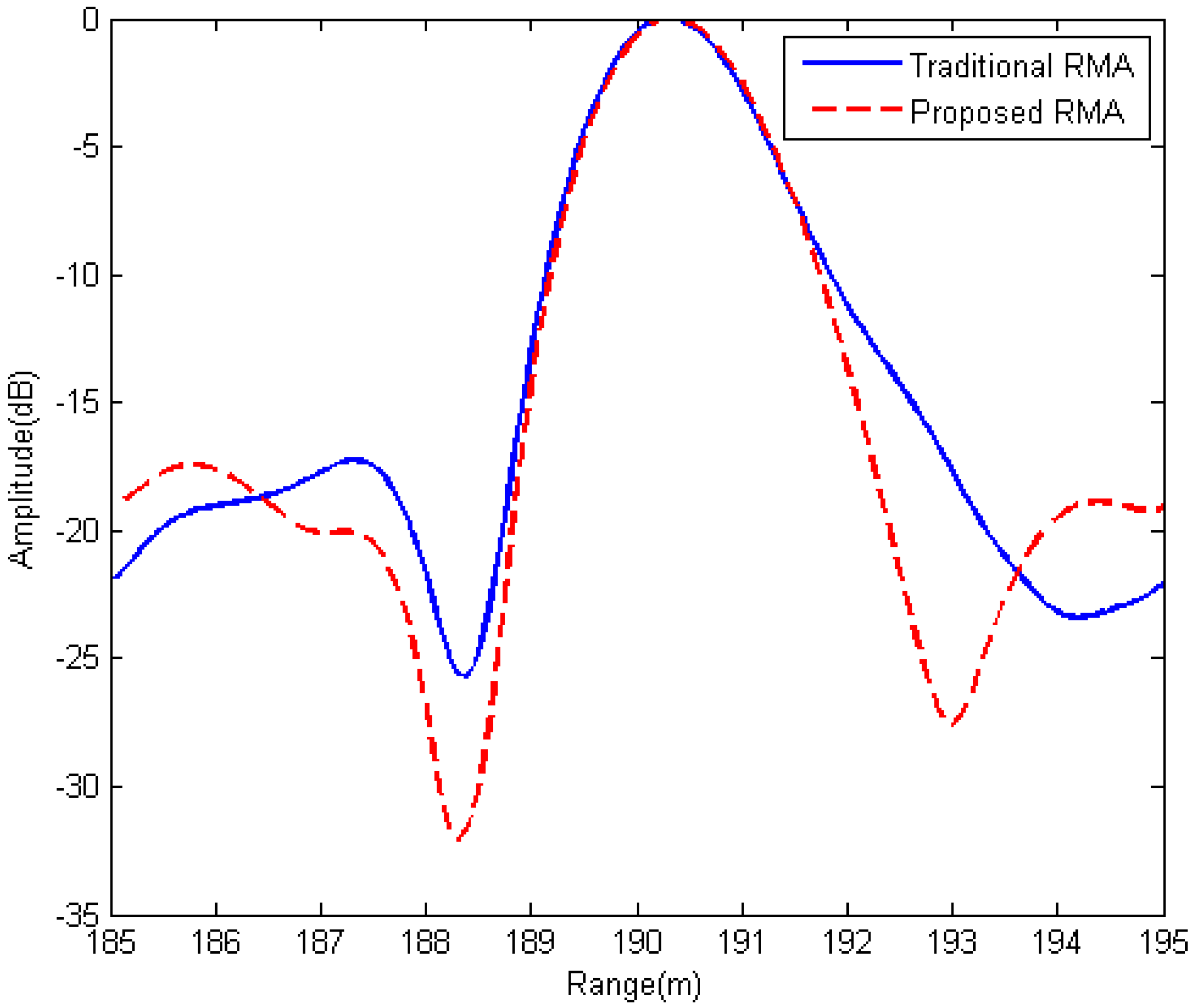
The proposed RMA takes advantage of the unique characteristics of the IF signal in dechirp-on-receive FMCW radar system and decreases the computational load and the memory needed for image processing. Moreover, the proposed RMA has the same accuracy and range of applications as the traditional RMA, which makes it a good alternate to the traditional RMA in FMCW SAR signal processing. When using the same size of spectrum, an improvement of the focusing quality is also obtained. This modified RMA also works in monostatic FMCW SAR processing. Point-target simulations verified the proposed monostatic-like spectrum and real data results proved the effectiveness of the modified RMA.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











