
Biosignal Analysis to Assess Mental Stress in Automatic Driving of Trucks: Palmar Perspiration and Masseter Electromyography


Abstract
:1. Introduction
2. Materials and Methods
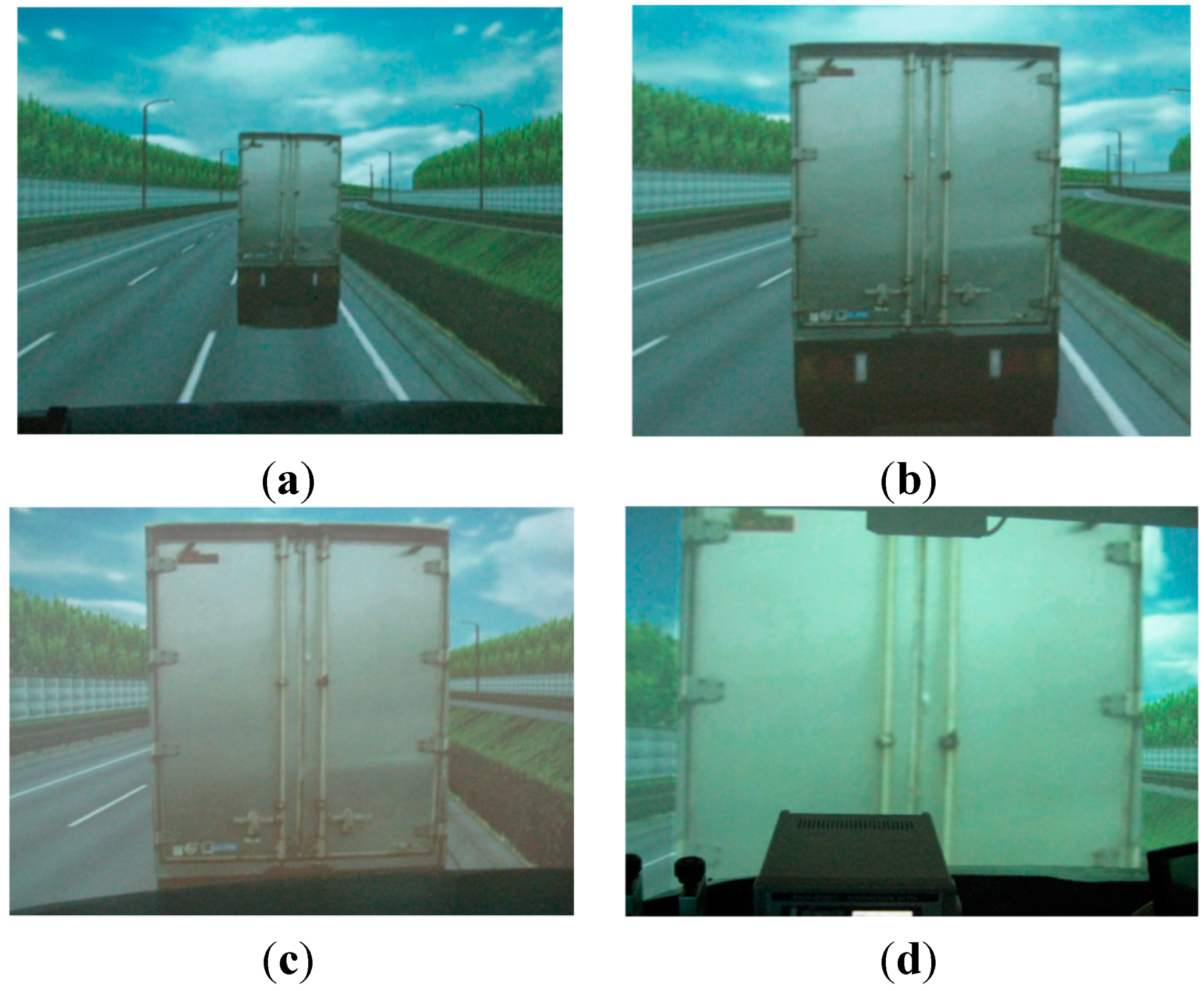
2.1. Automatic Driving of Trucks

2.2. Biosignal Measurement
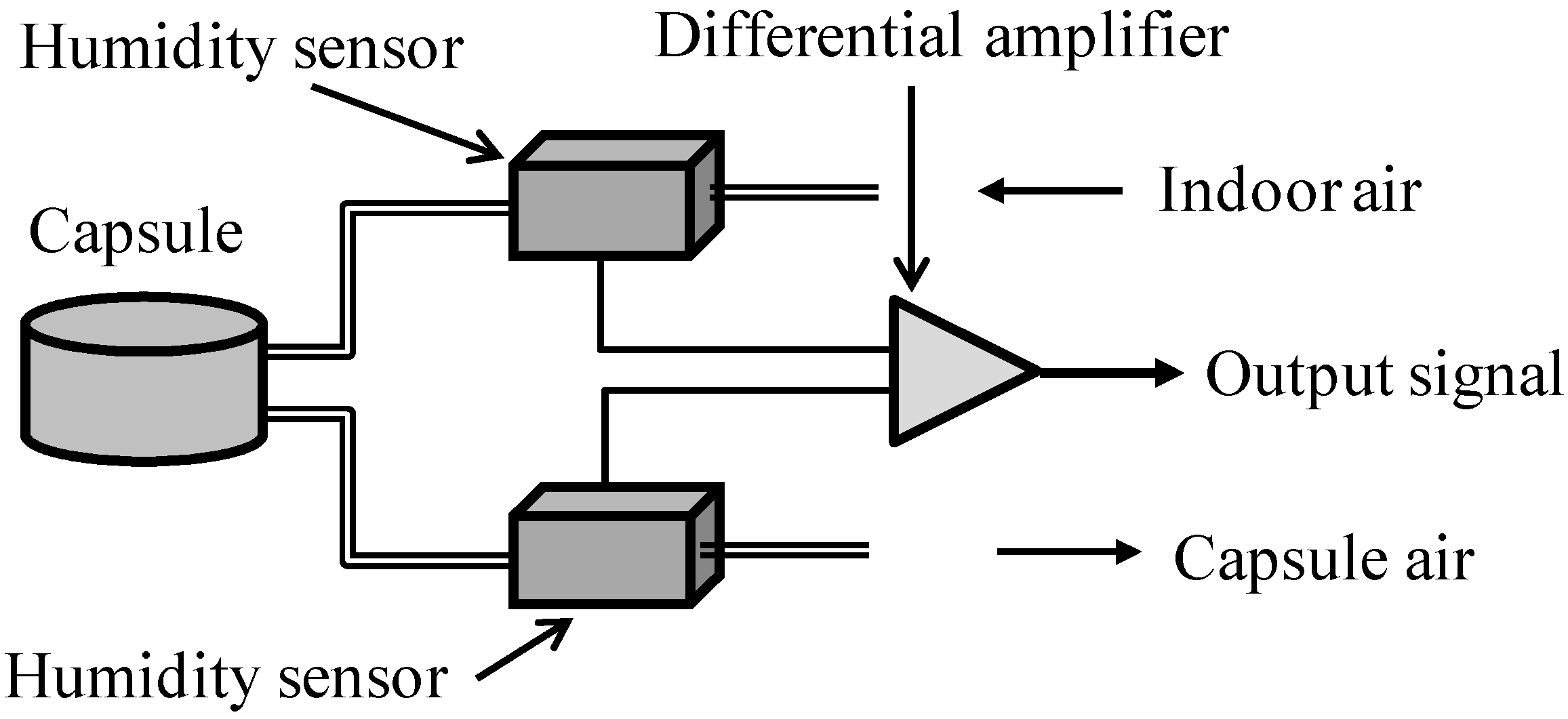
2.2.1. Palmar Perspiration


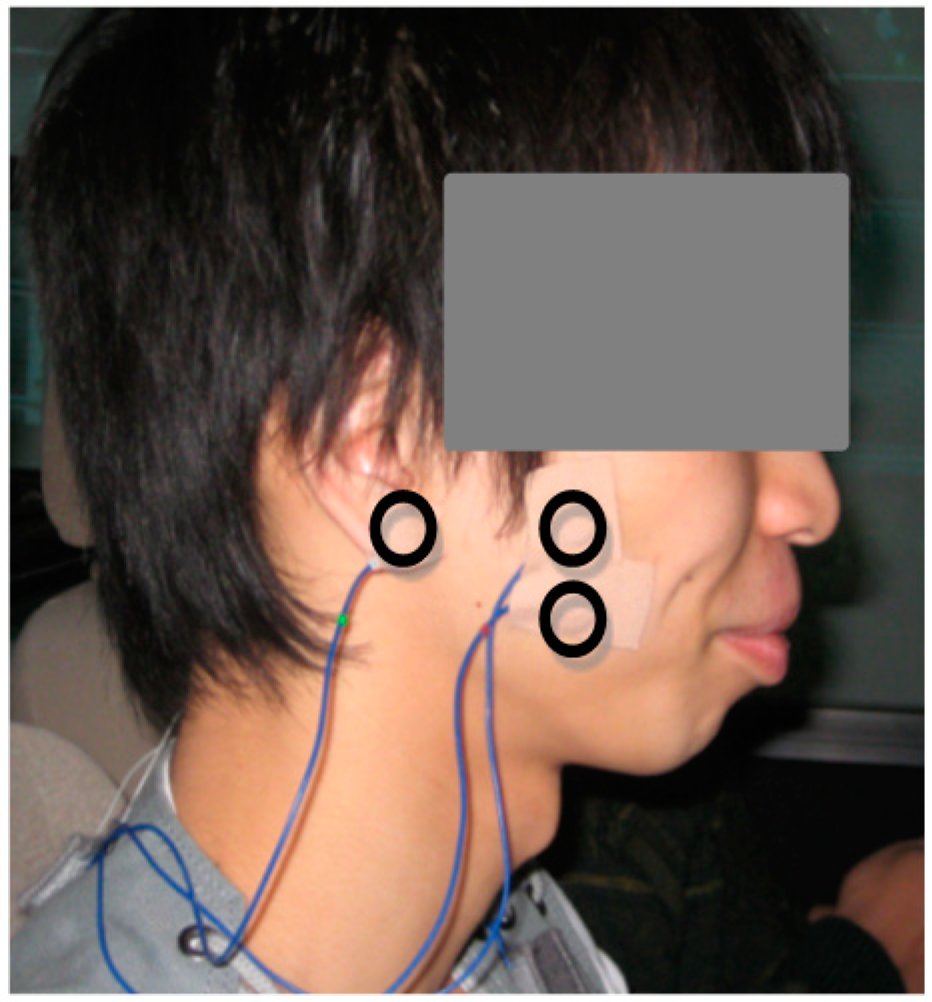
2.2.2. Masseter Electromyography

2.3. Biosignal Processing
2.4. Experiment
2.4.1. Participants
2.4.2. Protocol

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Condition | Repetition | Order | Duration |
|---|---|---|---|
| Manual driving with 20–30 m gap distance | twice | fixed | 5–8 min |
| Automatic driving with 12 m gap distance | twice | randomized | 5–8 min |
| Automatic driving with 8 m gap distance | twice | randomized | 5–8 min |
| Automatic driving with 4 m gap distance | twice | randomized | 5–8 min |
2.4.3. Data Collection
3. Results and Discussions
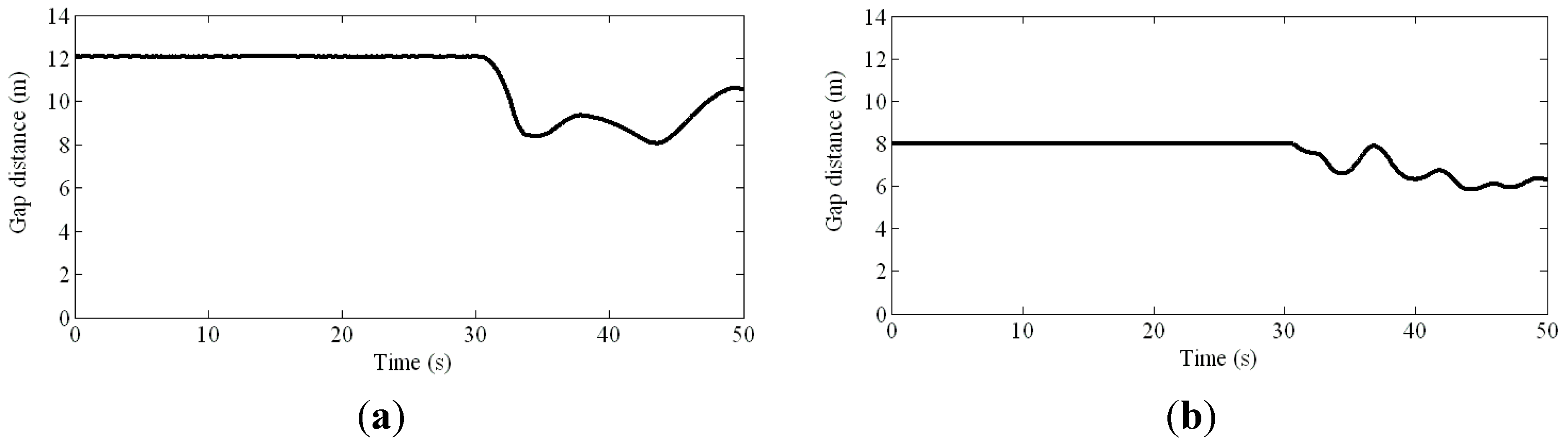
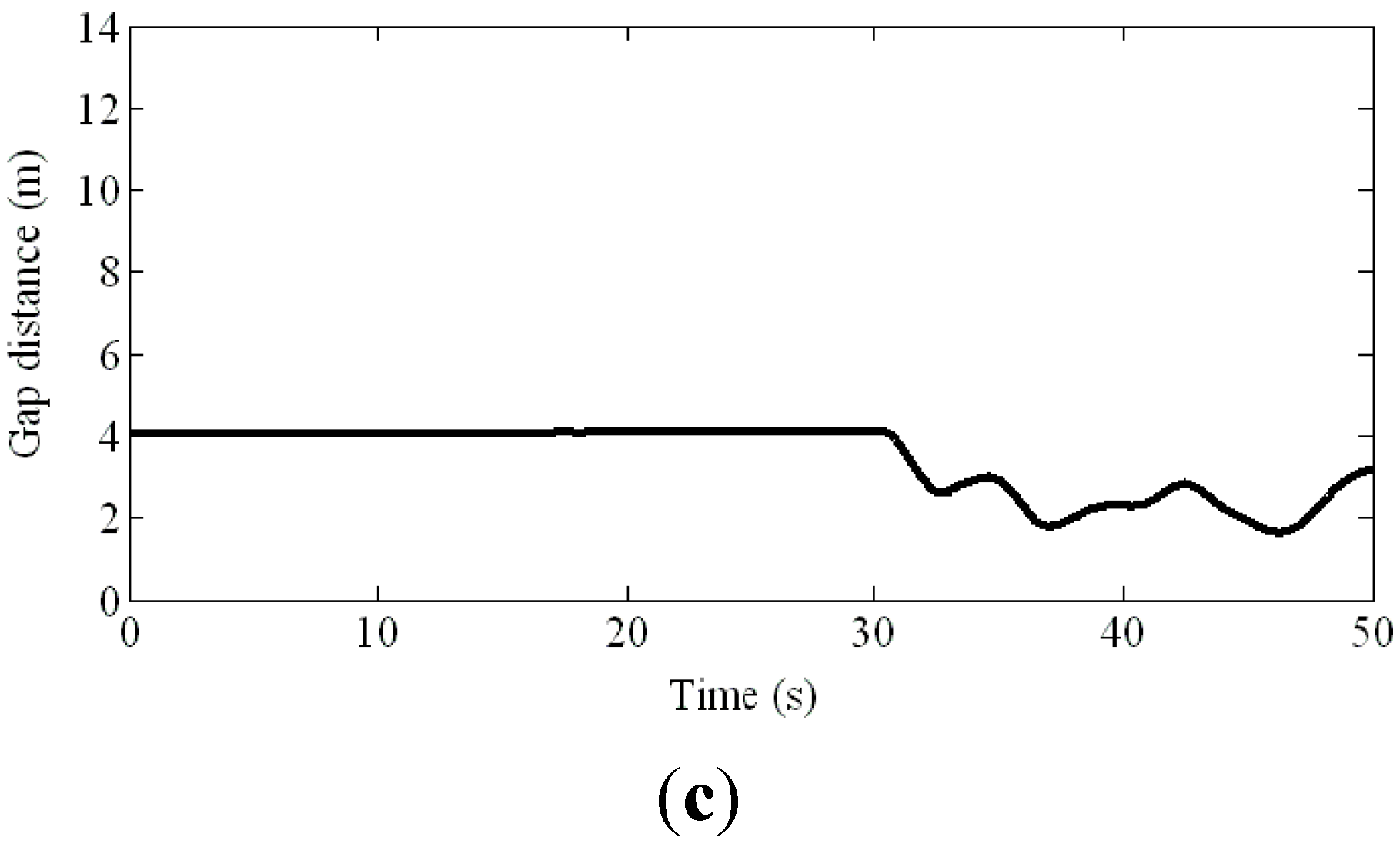
3.1. Driving Parameters



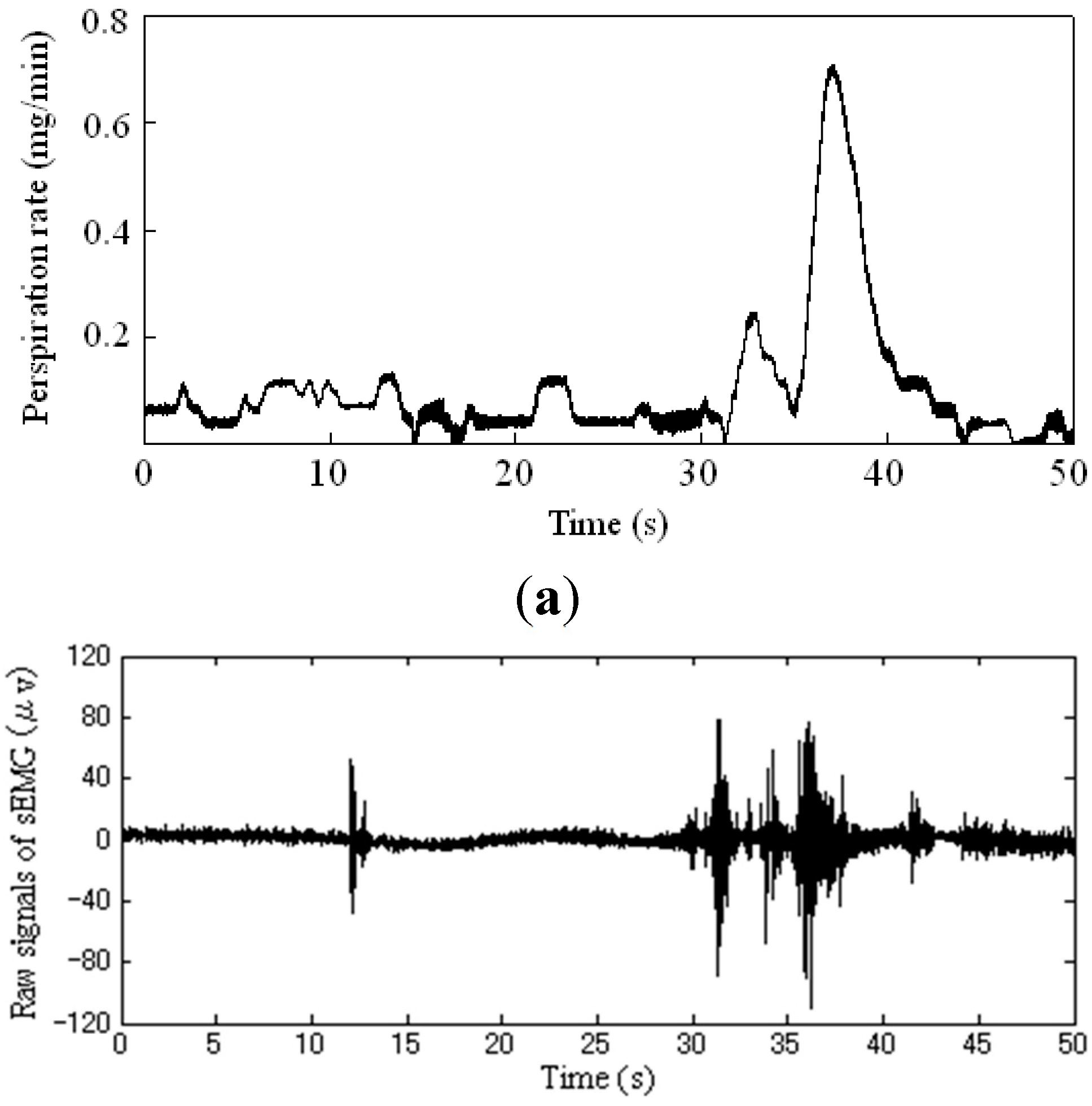
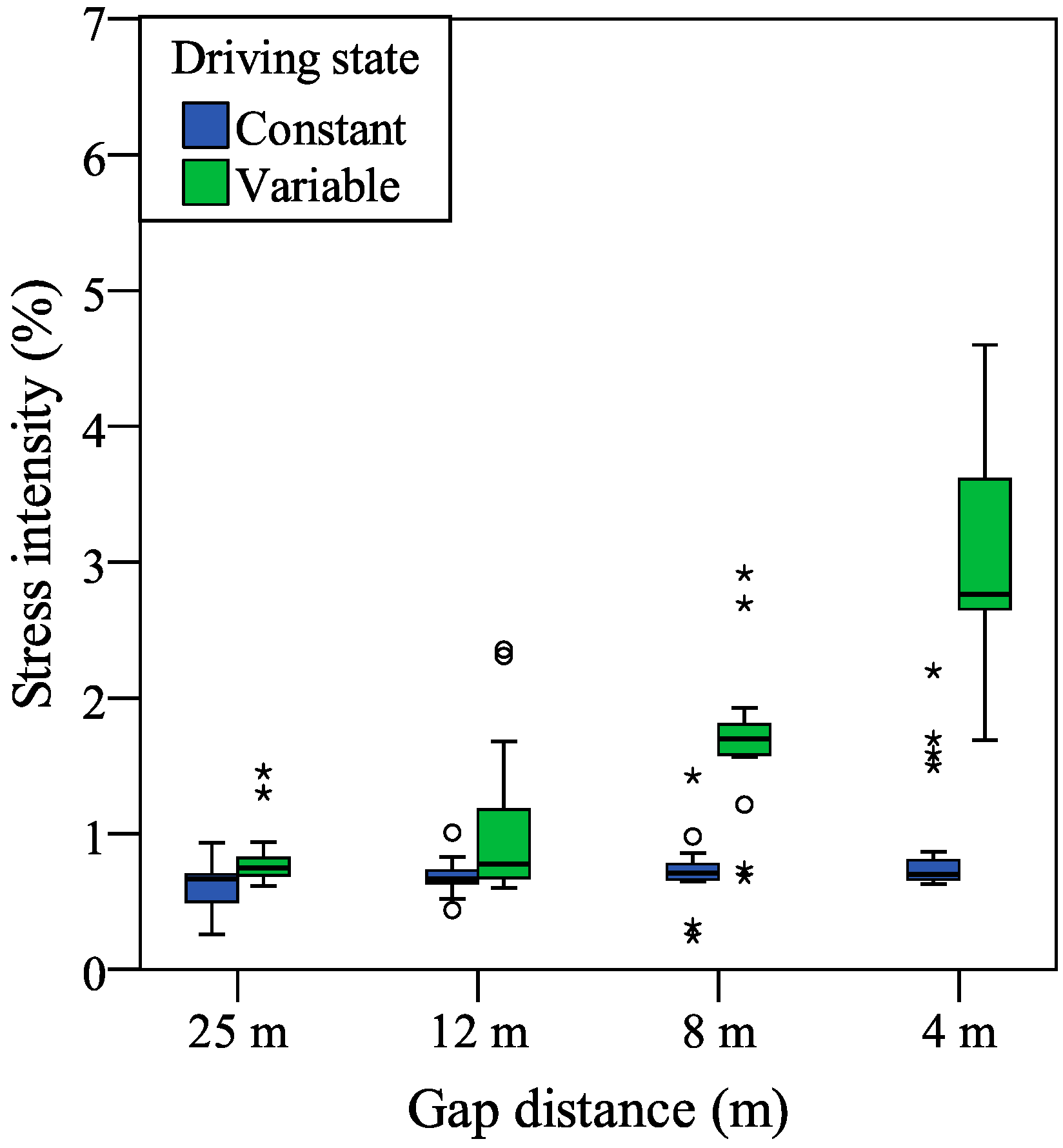
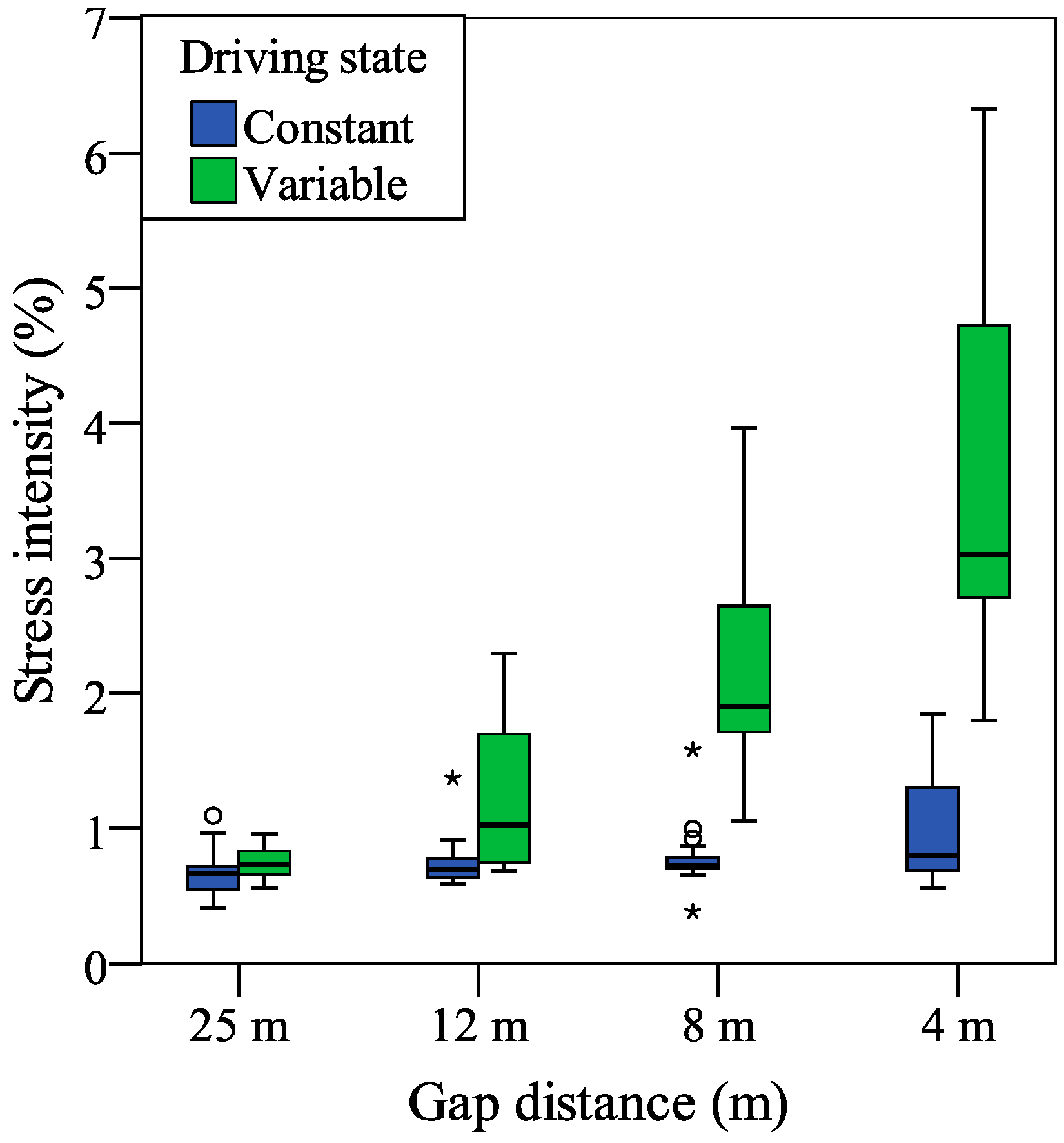
3.2. Biosignal Analysis



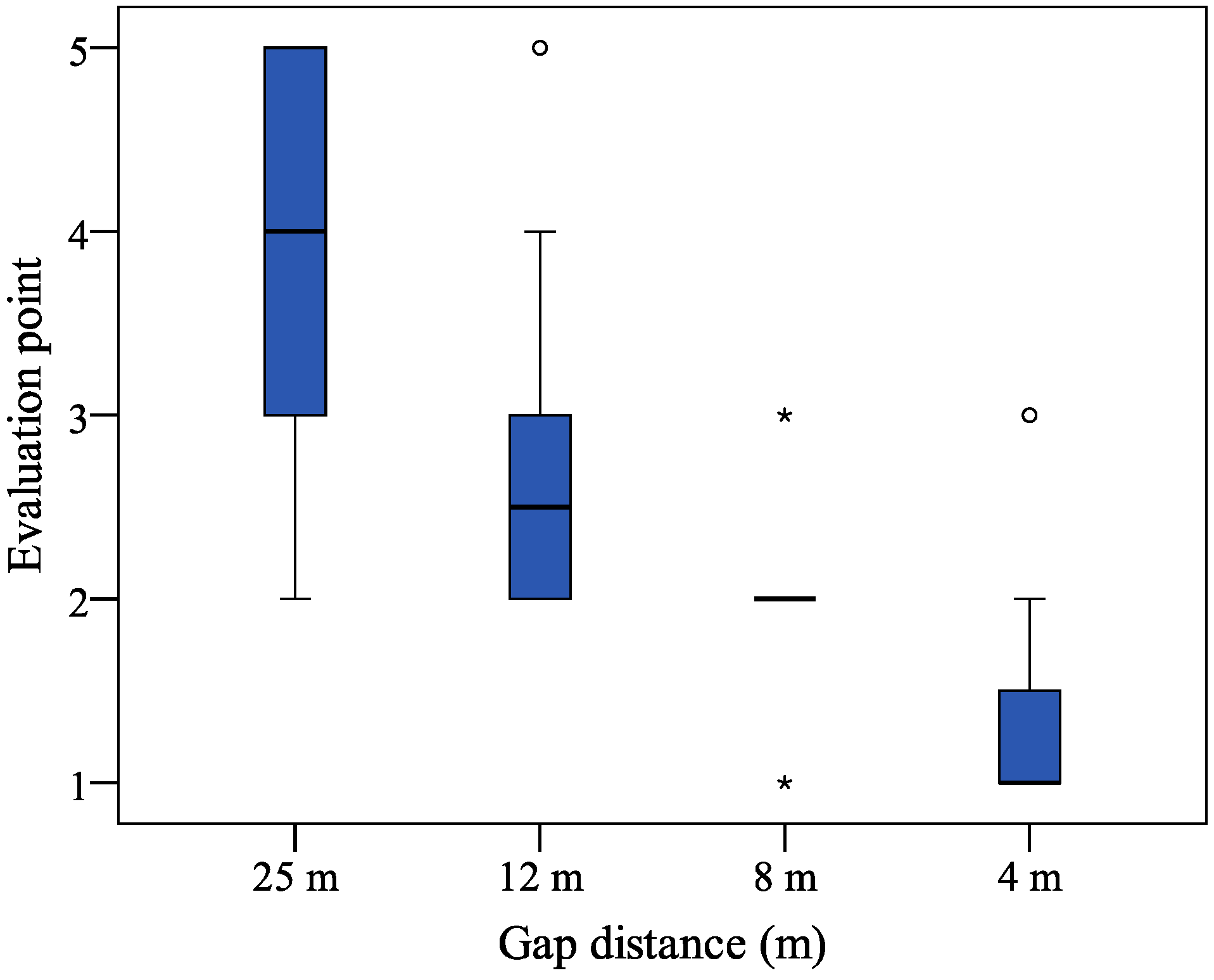
3.3. Subjective Evaluation

4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Markoff, J. Google cars drive themselves, in traffic. New York Times 2010, 1–4. [Google Scholar]
- Shladover, S.E. Cooperative (rather than autonomous) vehicle-highway automation systems. IEEE Intell. Transp. Syst. Mag. 2009, 1, 10–19. [Google Scholar]
- Kunze, R.; Ramakers, R.; Henning, K.; Jeschke, S. Organization and operation of electronically coupled truck platoons on German Motorways. Intell. Robot. Appl. 2009, 5928, 135–146. [Google Scholar]
- Tsugawa, S.; Kato, S. Energy ITS: Another application of vehicular communications. IEEE Commun. Mag. 2010, 18, 120–126. [Google Scholar] [CrossRef]
- Tsugawa, S.; Kato, S.; Aoki, K. An automated truck platoon for energy saving. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4109–4114.
- Merat, N.; de Waard, D. Human factors implications of vehicle automation: Current understanding and future directions. Transp. Res. Part F: Traff. Psychol. Behav. 2014, 27, 193–195. [Google Scholar] [CrossRef]
- Gouy, M.; Wiedemann, K.; Stevens, A.; Brunett, G.; Reed, N. Driving next to automated vehicle platoons: How do short time headways influence non-platoon drivers’ longitudinal control? Transp. Res. Part F: Traff. Psychol. Behav. 2014, 27, 264–273. [Google Scholar] [CrossRef]
- Cacuoppo, T.J.; Tassinary, L. Inferring psychological significance from physiological signals. Am. Psychol. 1990, 45, 16–28. [Google Scholar] [CrossRef] [PubMed]
- Rigas, G.; Goletsis, Y.; Fotiadis, D.I. Real-time driver’s stress event detection. IEEE Trans. Intell. Transp. Syst. 2013, 13, 221–234. [Google Scholar] [CrossRef]
- Seoane, F.; Mohino-Herranz, I.; Ferreira, J.; Alvarez, L.; Buendia, R.; Ayllón, D.; Llerena, C.; Gil-Pita, R. Wearable biomedical measurement systems for assessment of mental stress of combatants in real time. Sensors 2014, 14, 7120–7141. [Google Scholar] [CrossRef] [PubMed]
- Lee, B.; Lee, B.; Chung, W. Mobile healthcare for automatic driving sleep-onset detection using wavelet-based EEG and respiration signals. Sensors 2014, 14, 17915–17936. [Google Scholar] [CrossRef] [PubMed]
- Noh, Y.; Jeong, D. Implementation of a data packet generator using pattern matching for wearable ECG monitoring systems. Sensors 2014, 14, 12623–12639. [Google Scholar] [CrossRef] [PubMed]
- Wijsman, J.; Grundlehner, B.; Liu, H.; Penders, J.; Hermens, H. Towards continuous mental stress level estimation from physiological signals. Int. J. Psychophysiol. 2012, 85, 425. [Google Scholar] [CrossRef]
- Wijsman, J.; Grundlehner, B.; Penders, J.; Hermens, H. Trapezius muscle EMG as predictor of mental stress. ACM Trans. Embed. Comput. Syst. 2013, 12, 99:1–99:20. [Google Scholar] [CrossRef]
- Zheng, R.; Nakano, K.; Okamoto, Y.; Ohori, M.; Hori, S.; Suda, Y. Evaluation of sternocleidomastoid muscle activity of a passenger in response to a car’s lateral acceleration while slalom driving. IEEE Trans. Hum.-Mach. Syst. 2013, 43, 405–415. [Google Scholar] [CrossRef]
- Okino, K.; Miyoshi, J.; Kawada, T.; Matsuda, Y.; Fujisawa, M.; Domon, H.; Ishibashi, K.; Shobuzawa, M. Autonomic response and masseter muscle activity under stress loading. Jpn. Soc. Stomatognathic Funct. 1989, 8, 189–194. [Google Scholar] [CrossRef]
- Hidaka, O.; Yanagi, M.; Takada, K. Mental stress-induced physiological change in the human masseter muscle. J. Dent. Res. 2004, 83, 227–231. [Google Scholar] [CrossRef] [PubMed]
- Kumar, M.; Weippert, M.; Vilbrandt, R.; Kreuzfeld, S.; Stoll, R. Fuzzy evaluation of heart rate signals for mental stress assessment. IEEE Trans. Fuzzy Syst. 2007, 15, 791–808. [Google Scholar] [CrossRef]
- Ohsuga, M.; Futomi Shimono, F.; Genno, H. Assessment of phasic work stress using autonomic indices. Int. J. Psychophysiol. 2001, 40, 211–220. [Google Scholar] [CrossRef] [PubMed]
- Jorna, M.A.G.P. Spectral analysis of heart rate and psychological state: A review of its validity as a workload index. Biol. Psychol. 1992, 34, 237–257. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, A.T.; Zeng, Y. A physiological study of relationship between designer’s mental effort and mental stress during conceptual design. Comput.-Aid. Des. 2014, 54, 3–18. [Google Scholar] [CrossRef]
- Dabbs, M.; Johnson, E.; Leventhal, H. Palmar sweating: A quick and simple measure. J. Exp. Psychol. 1968, 78, 347–350. [Google Scholar] [CrossRef] [PubMed]
- Kohler, T.; Weber, D.D.; Vogele, C. The behaviour of the PSI (palmar perspiration index) during two stressful laboratory situations. J. Psychophysiol. 1990, 4, 281–287. [Google Scholar]
- Ohashi, T.; Sakaguchi, M.; Tsuda, T. Human perspiration measurement. Physiol. Measur. 1998, 19, 449–461. [Google Scholar] [CrossRef]
- Masaoka, Y.; Onaka, Y.; Shimizu, Y.; Sakurai, S.; Homma, I. State anxiety dependent on perspiration during mental stress and deep inspiration. J. Physiol. Sci. 2007, 57, 121–126. [Google Scholar] [CrossRef] [PubMed]
- Fisher, D.L.; Rizzo, M.; Caird, J.K.; Lee, J.D. Handbook of Driving Simulation for Engineering, Medicine, and Psychology; CRC Press: New York, NY, USA, 2011. [Google Scholar]
- Yamaguchi, D.; Suda, Y.; Onuki, M.; Oda, T.; Ishikawa, H.; Ilgi, H. Improvement of realistic sensation on universal driving simulator. In Proceedings of the 16th ITS World Congress, Stockholm, Sweden, 17 August 2009.
- Zheng, R.; Nakano, K.; Yamabe, S.; Aki, M.; Nakamura, H.; Suda, Y. Study on emergency avoidance braking for the automatic platooning of trucks. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1748–1757. [Google Scholar] [CrossRef]
- Toyooka, H.; Sasaki, H.; Suemitsu, T.; Munehisa, N.; Hashida, H.; Nagasawa, T.; Tsuru, H. The study on the standardization of electromyography of the masseter muscle and temporal muscle. Dent. Mag. Hiroshima Univ. 1974, 6, 109–116. [Google Scholar]
- Boileau, P.E.; Turcot, D.; Scory, H. Evaluation of whole-body vibration exposure using a fourth power method and comparison with ISO 2631. J. Sound Vibr. 1989, 129, 143–154. [Google Scholar] [CrossRef]
- Marieke, M.; Beukel, V.D. The road to automated driving: Dual mode and human factors considerations. In Proceeding of the 16th International IEEE Conference on ITS, Hague, The Netherland, 6–9 September 2013; pp. 2262–2267.
- Larsson, F.L.A.; Kircher, K.; Hultgren, A.J. Learning from experience: Familiarity with ACC and responding to a cut-in situation in automated driving. Transp. Res. Part F 2014, 27, 229–237. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, R.; Yamabe, S.; Nakano, K.; Suda, Y. Biosignal Analysis to Assess Mental Stress in Automatic Driving of Trucks: Palmar Perspiration and Masseter Electromyography. Sensors 2015, 15, 5136-5150. https://doi.org/10.3390/s150305136
Zheng R, Yamabe S, Nakano K, Suda Y. Biosignal Analysis to Assess Mental Stress in Automatic Driving of Trucks: Palmar Perspiration and Masseter Electromyography. Sensors. 2015; 15(3):5136-5150. https://doi.org/10.3390/s150305136
Chicago/Turabian StyleZheng, Rencheng, Shigeyuki Yamabe, Kimihiko Nakano, and Yoshihiro Suda. 2015. "Biosignal Analysis to Assess Mental Stress in Automatic Driving of Trucks: Palmar Perspiration and Masseter Electromyography" Sensors 15, no. 3: 5136-5150. https://doi.org/10.3390/s150305136
APA StyleZheng, R., Yamabe, S., Nakano, K., & Suda, Y. (2015). Biosignal Analysis to Assess Mental Stress in Automatic Driving of Trucks: Palmar Perspiration and Masseter Electromyography. Sensors, 15(3), 5136-5150. https://doi.org/10.3390/s150305136