
An Evaluation of Skylight Polarization Patterns for Navigation

Abstract
:1. Introduction
2. Materials and Methods
2.1. Instrument Description

2.2. Instrument Calibration

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Calibration Parameters (Pixel) | Values |
|---|---|
| Focal length fc | [475.87278, 475.91533] |
| Principal point Cc | [643.71206, 477.27085] |
| Skew coefficient αc | 0.00047 |
| Distortion coefficients kc | [−0.26688, 0.07423, 0.00011, 0.00023, −0.00940] |
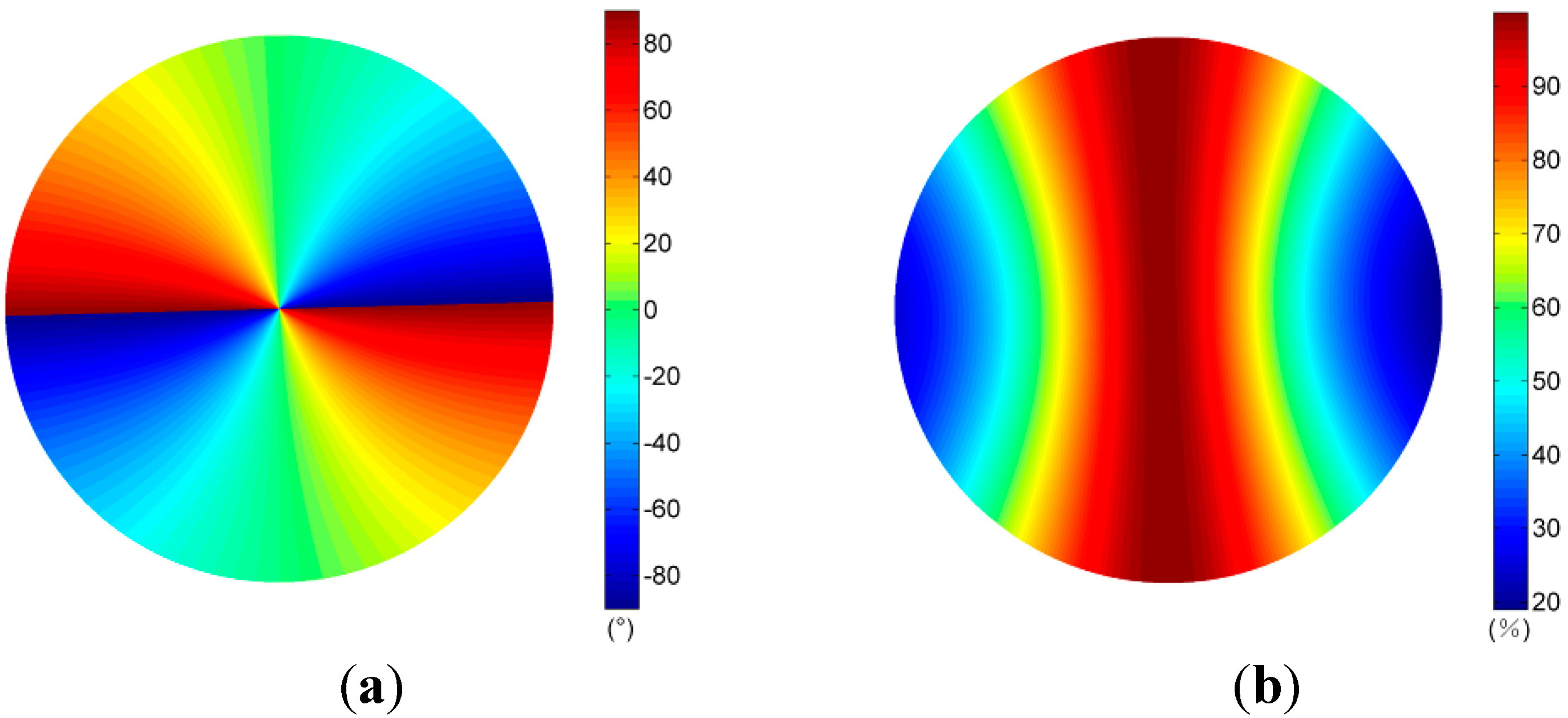
2.3. Polarization Patterns Estimation and Analysis
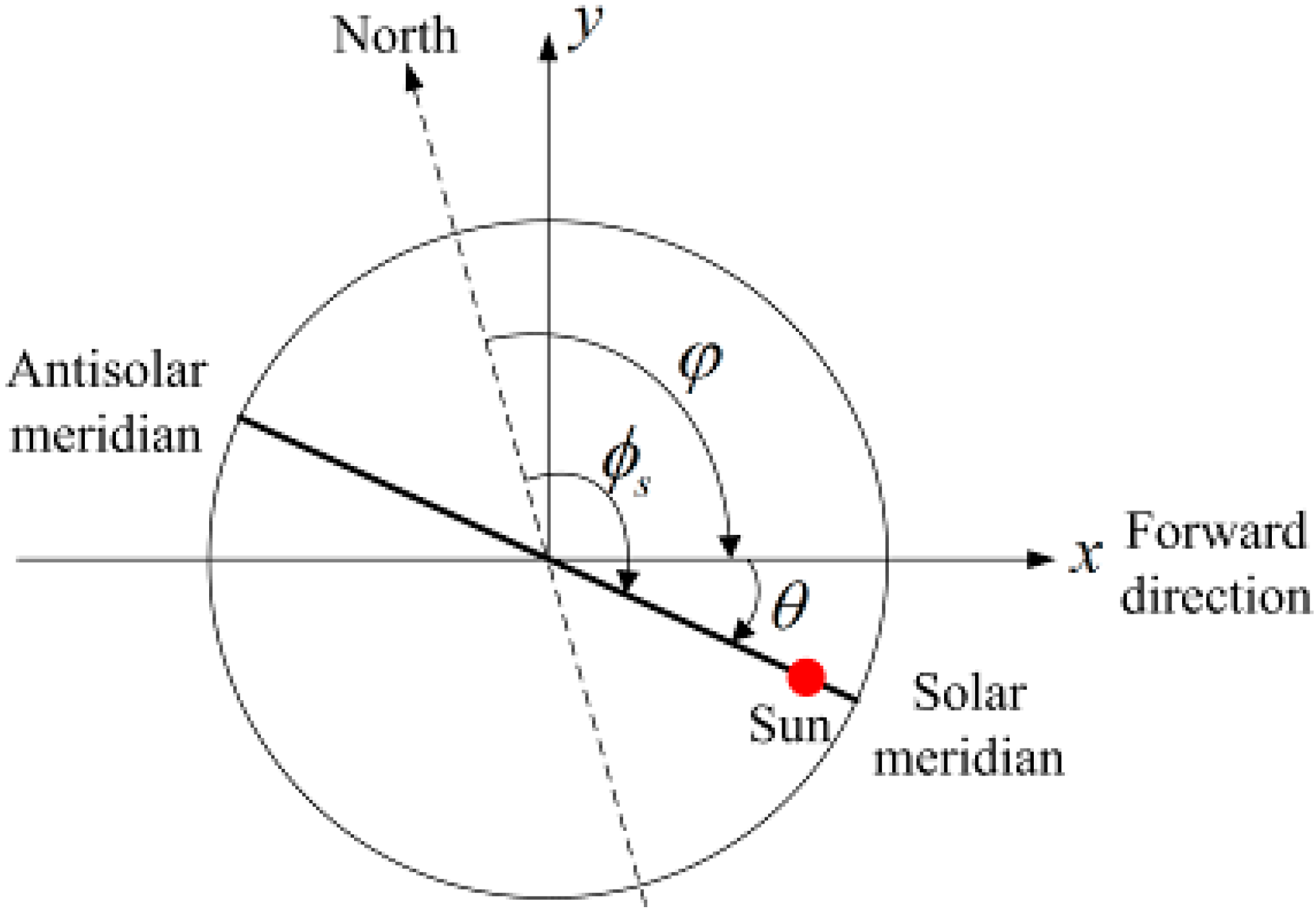
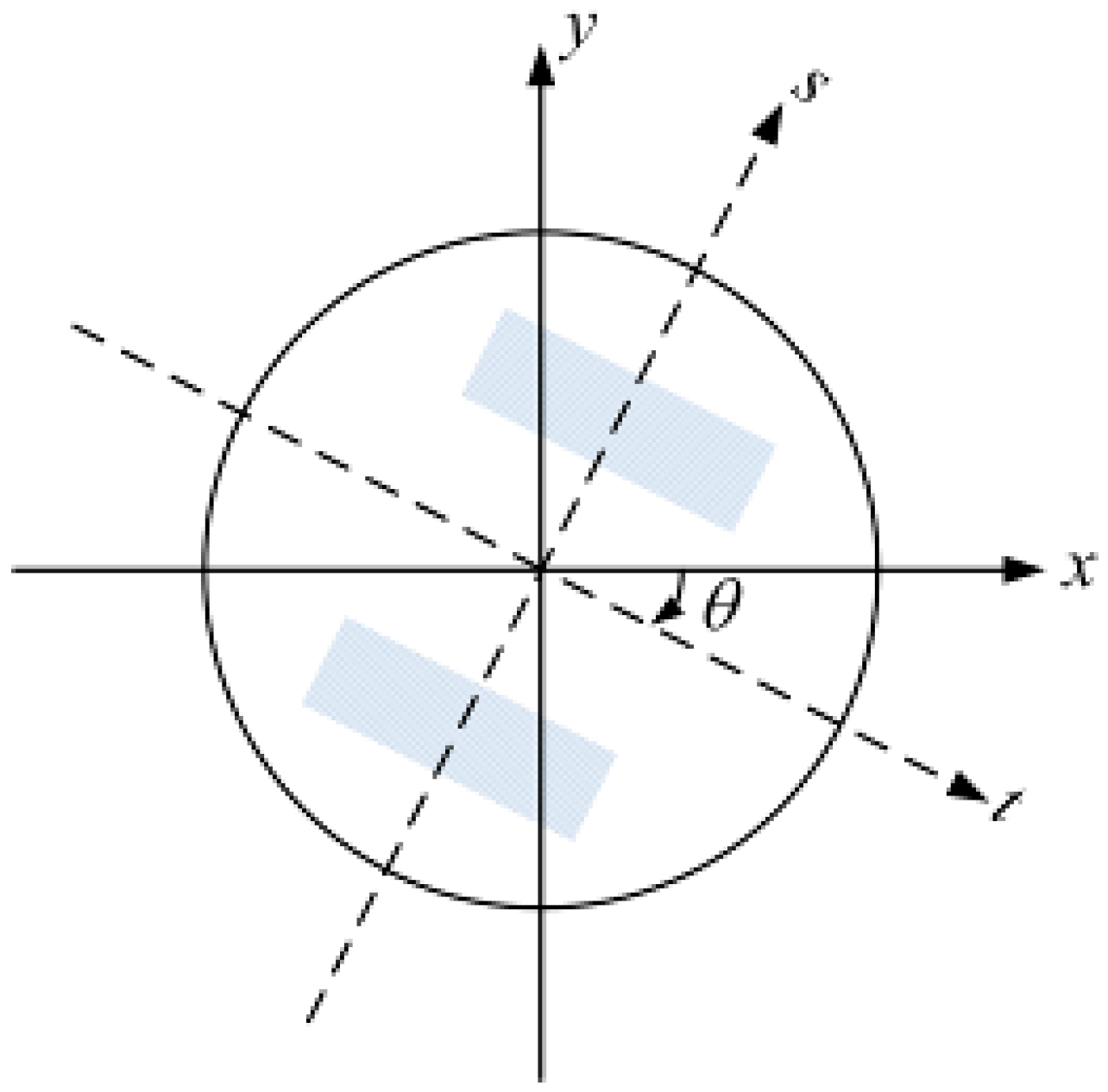
2.4. Using the Angle of Polarization (AOP) Patterns for Orientation

2.5. Solar Meridian Extracted from the Angle of Polarization (AOP) Patterns

3. Simulation Studies


| Measurement Noise | Calculation Methods | Mean Error (°) |
|---|---|---|
| No noise | Fitting based method | 0.18 |
| Our method without pretreatment | 0.15 | |
| Our method | 0.06 | |
| σ = 1° | Fitting based method | 0.20 |
| Our method without pretreatment | 0.32 | |
| Our method | 0.16 | |
| σ = 2° | Fitting based method | 0.23 |
| Our method without pretreatment | 0.36 | |
| Our method | 0.19 | |
| σ = 4° | Fitting based method | 0.35 |
| Our method without pretreatment | 0.37 | |
| Our method | 0.20 |
4. Experiment Results
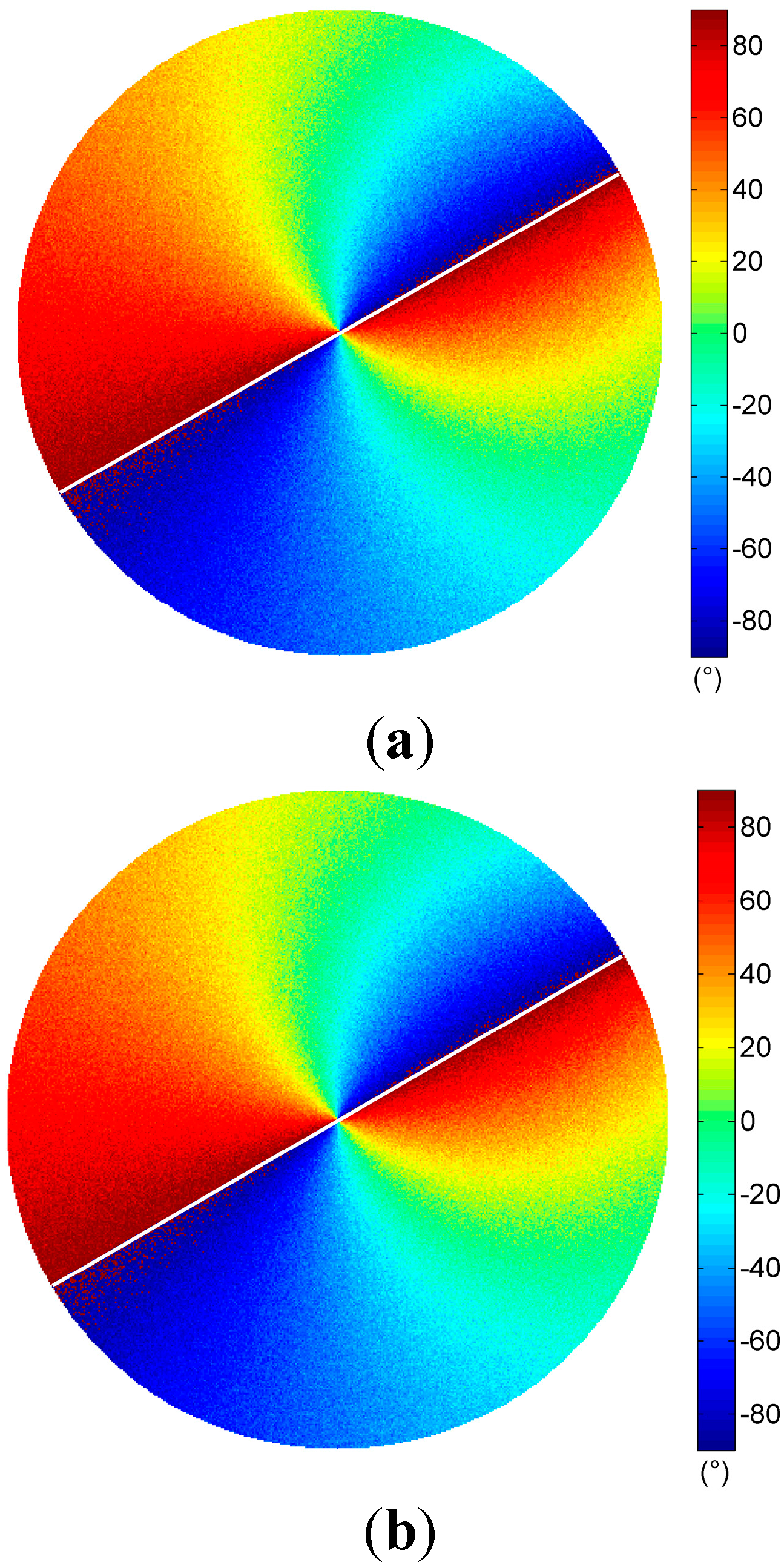
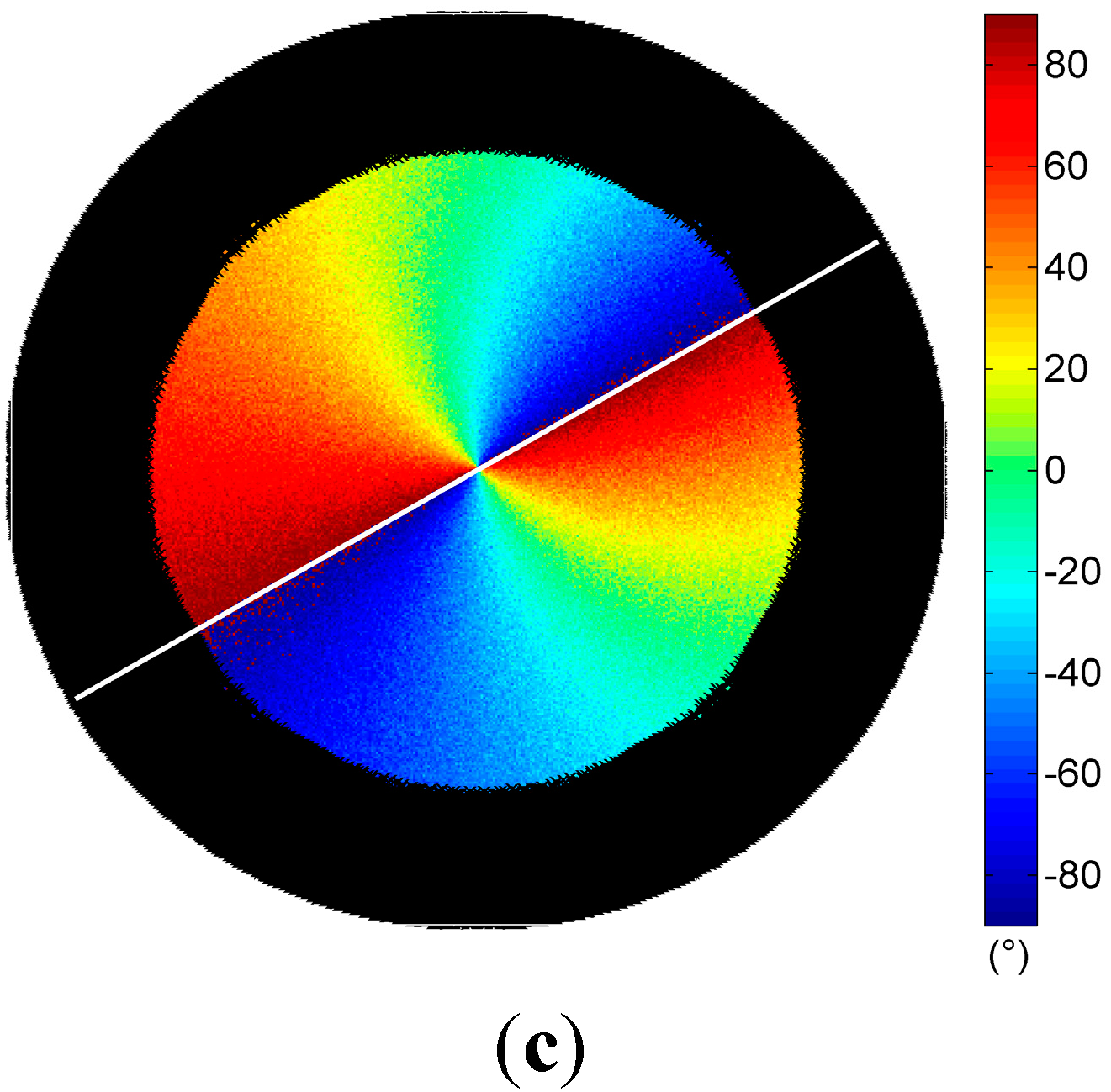
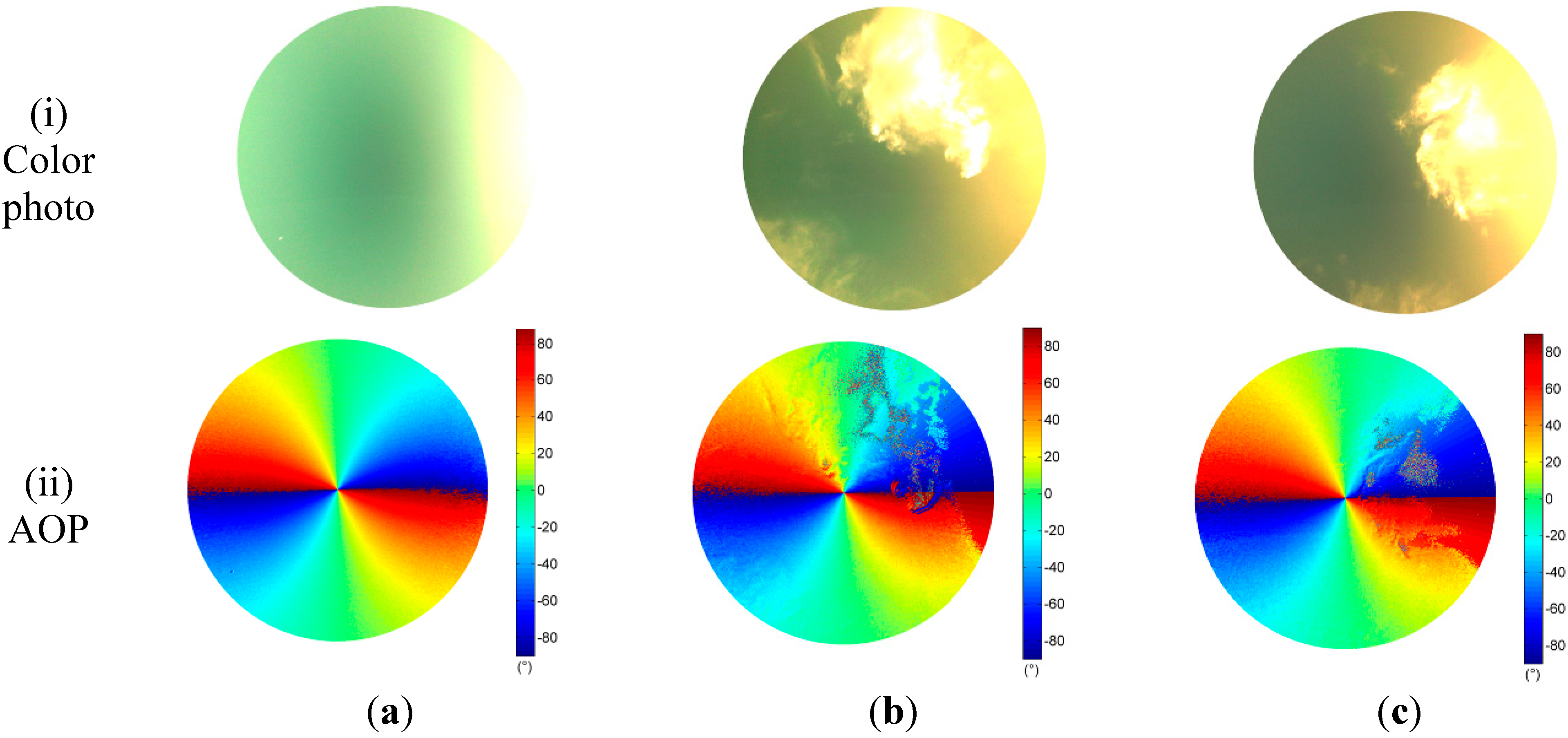
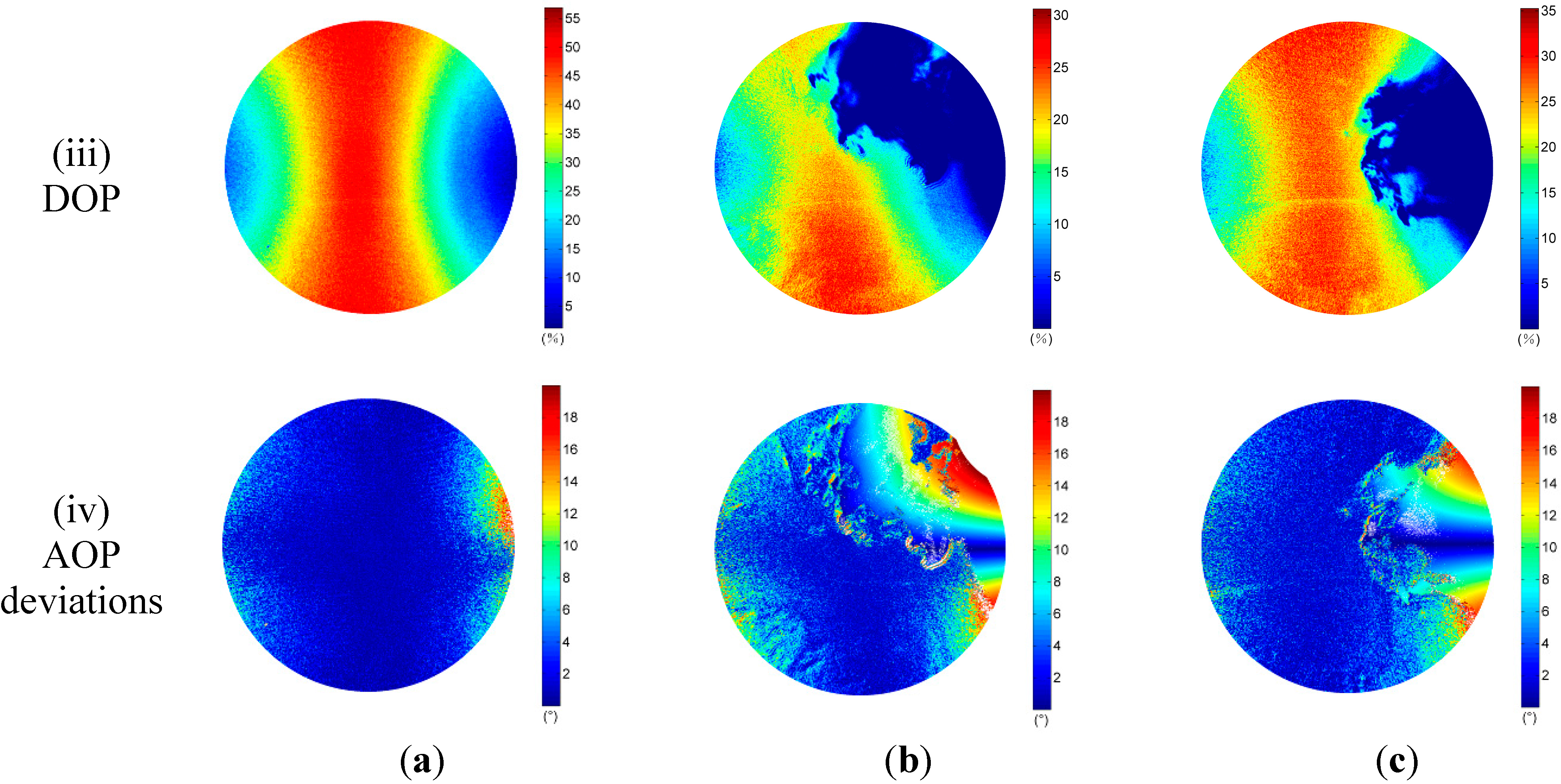
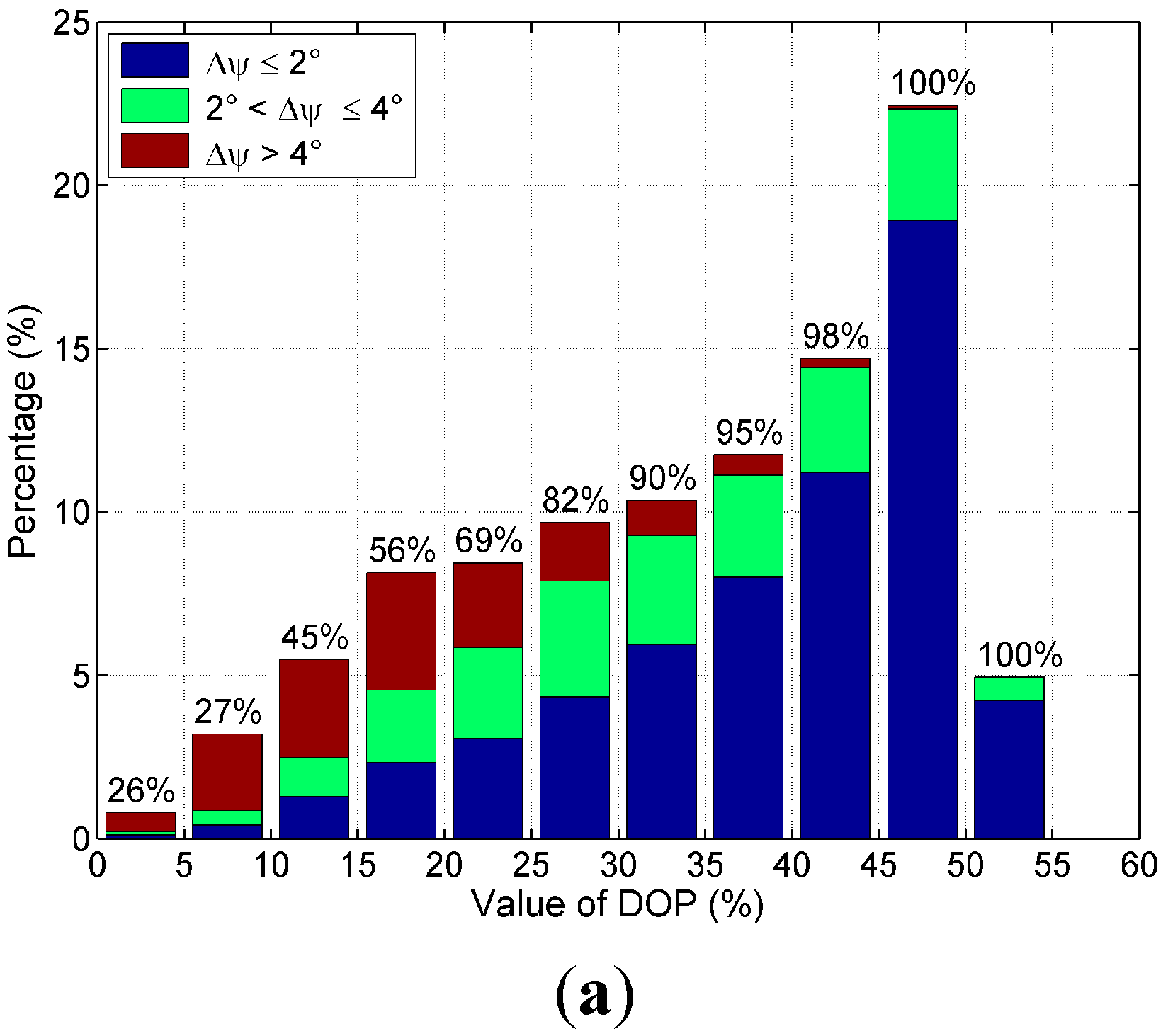
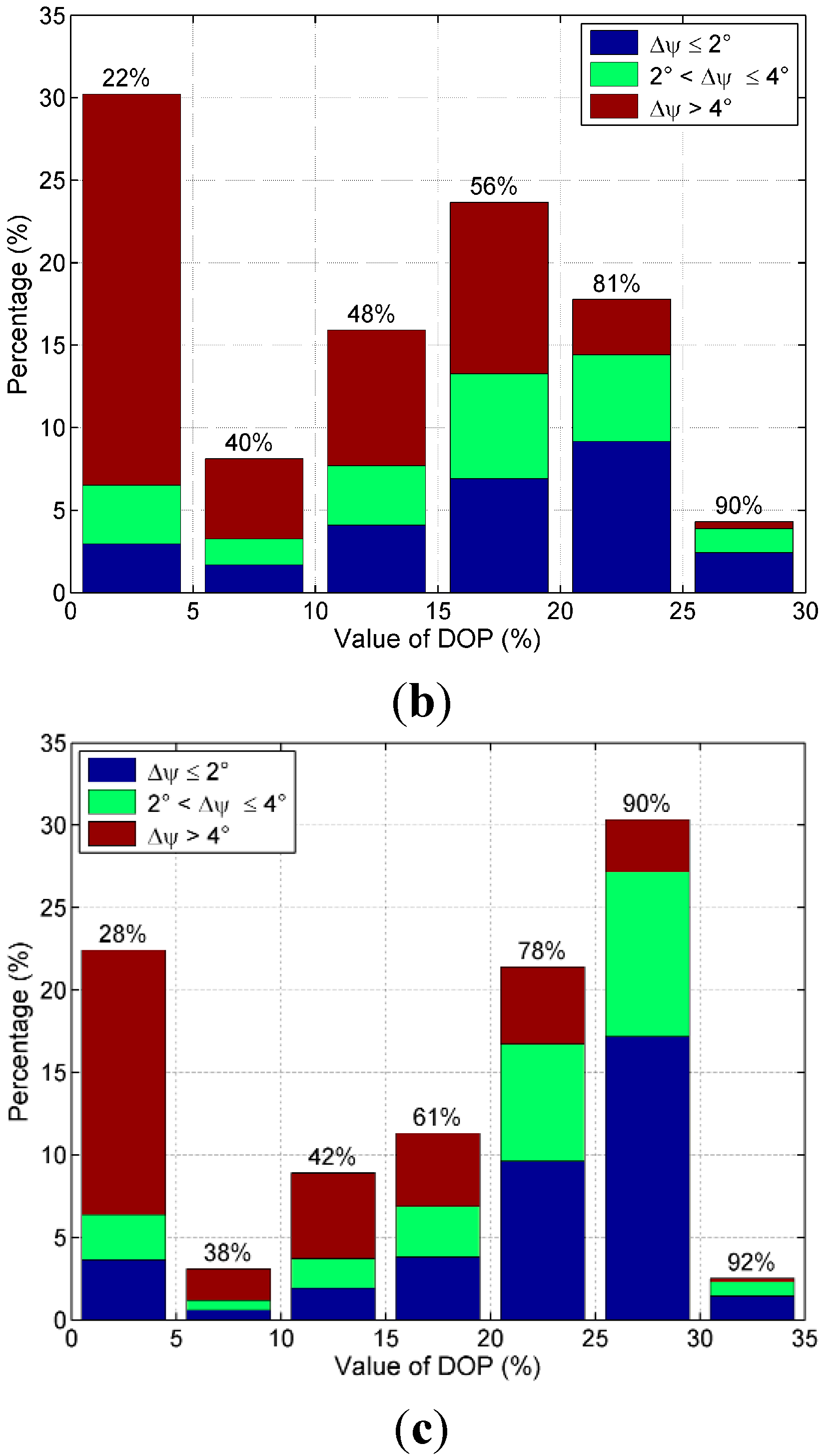
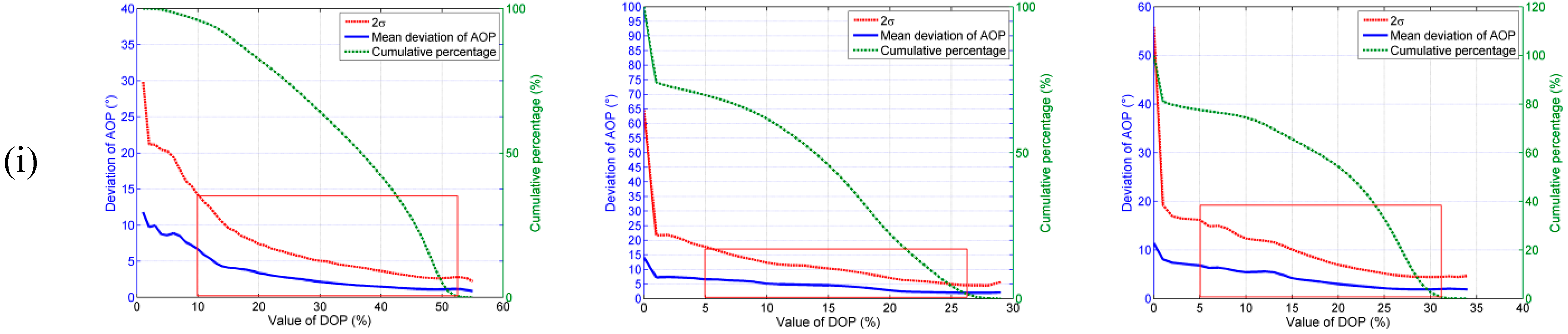
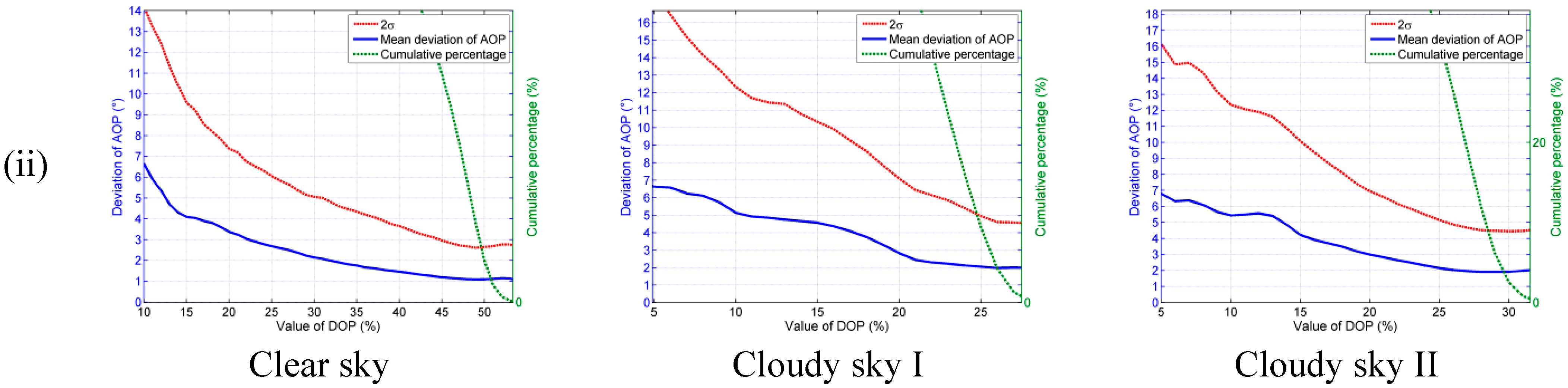
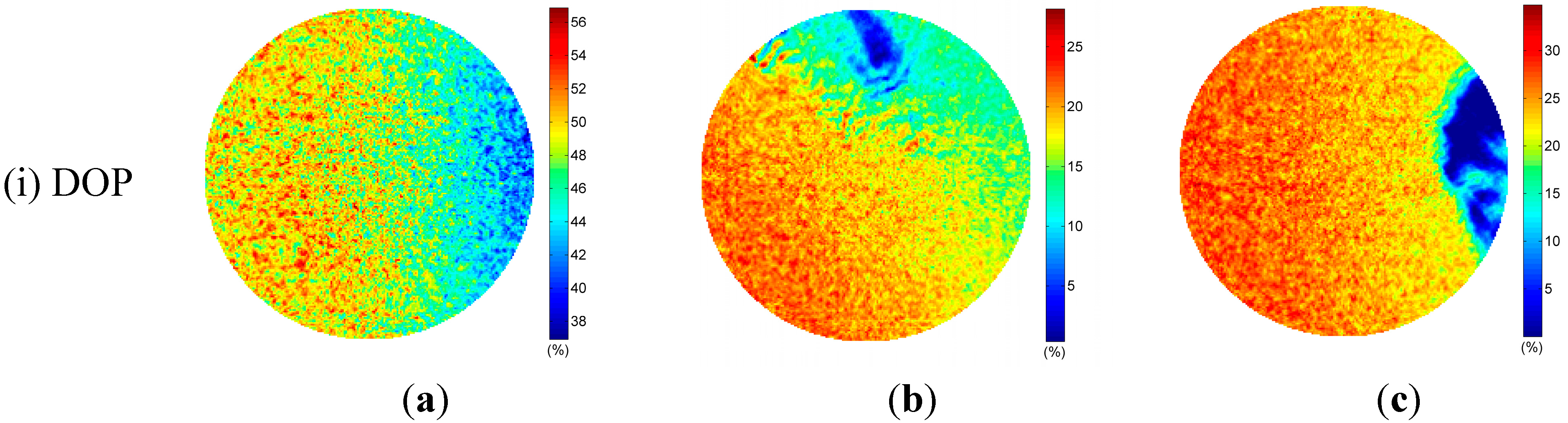
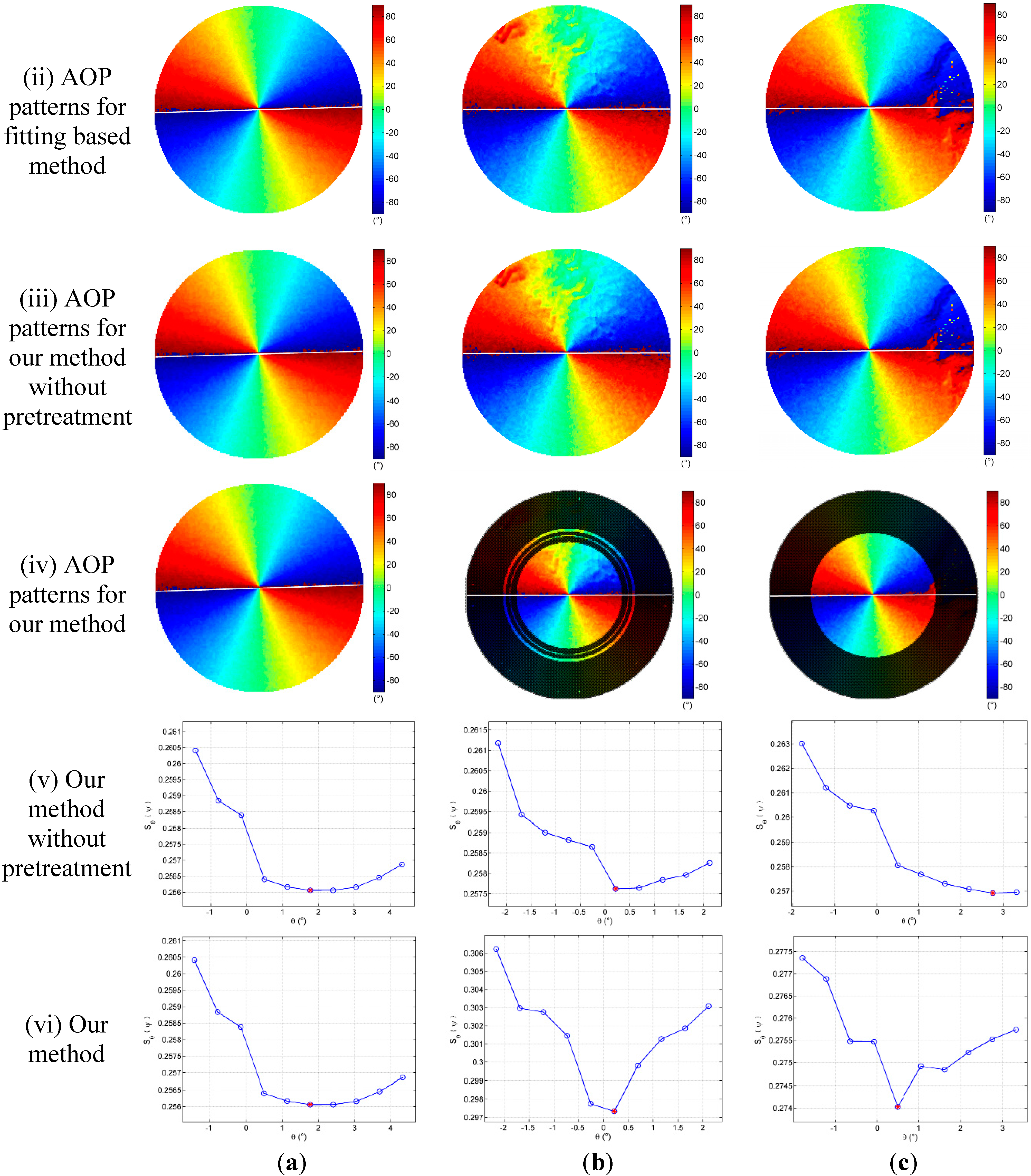
4.1. Skylight Polarization Measurements and Evaluation








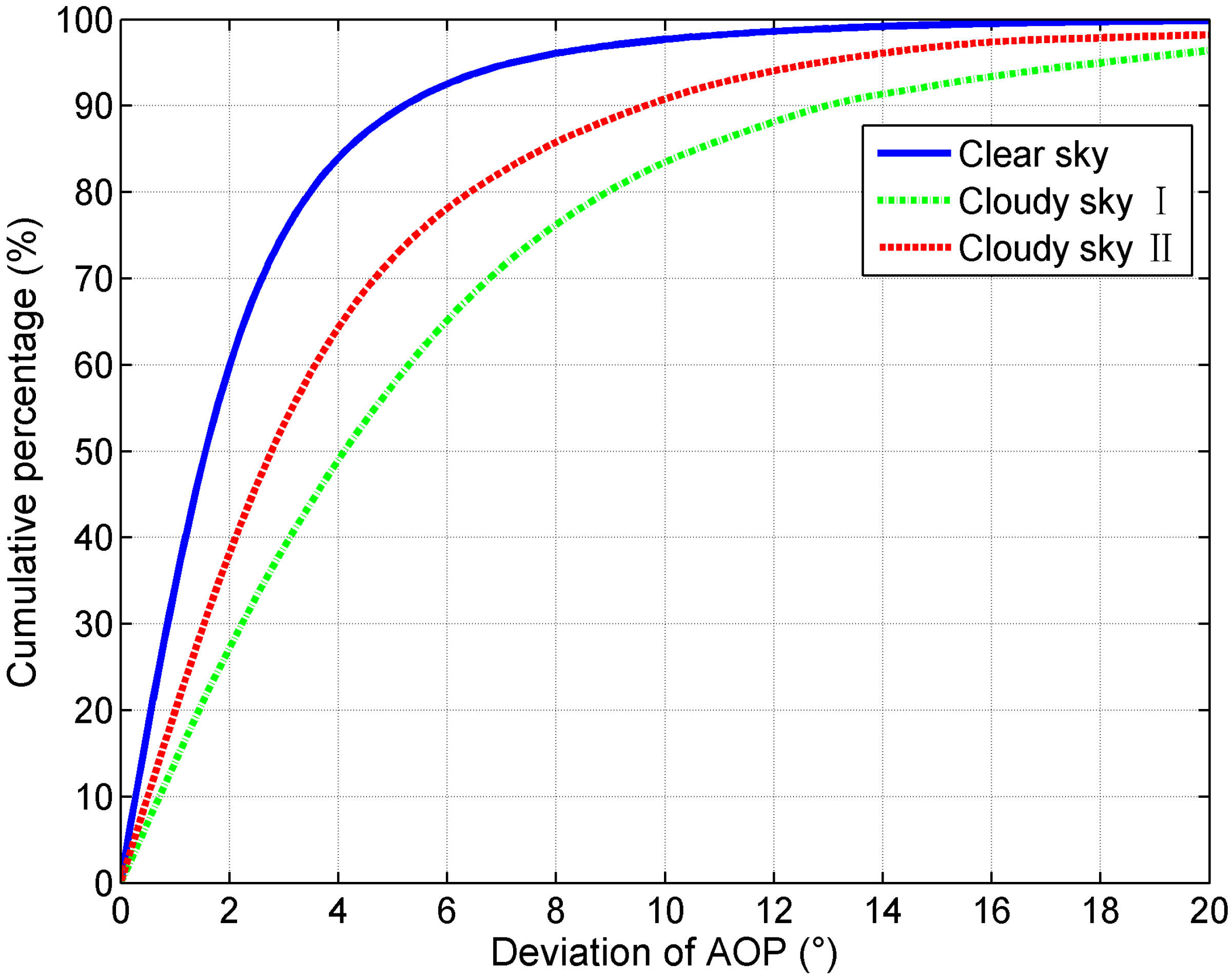
4.2. Solar Meridian Orientation Calculation


| Algorithms | Clear Sky | Cloudy Sky I | Cloudy Sky II |
|---|---|---|---|
| Fitting based method | 0.33° | 0.48° | 0.47° |
| Our method without pretreatment | 0.27° | 0.38° | 1.86° |
| Our method | 0.27° | 0.38° | 0.41° |
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Collett, M.; Collett, T.; Bisch, S.; Wehner, R. Local and global vectors in desert ant navigation. Nature 1998, 394, 269–272. [Google Scholar] [CrossRef]
- Shashar, N.; Johnsen, S.; Lerner, A.; Sabbah, S.; Chiao, C.-C.; Mathger, L.M.; Hanlon, R.T. Underwater linear polarization: Physical limitations to biological functions. Phil. Trans. R. Soc. B 2011, 366, 649–654. [Google Scholar] [CrossRef] [PubMed]
- Horváth, G.; Varju, D. Polarized light in animal vision: Polarization patterns in nature. Springer-Verlag: Berlin, Germany, 2004. [Google Scholar]
- Lambrinos, D.; Möller, R.; Labhart, T.; Pfeifer, R.; Wehner, R. A mobile robot employing insect strategies for navigation. Robot. Auton. Syst. 2000, 30, 39–64. [Google Scholar] [CrossRef]
- Chu, J.; Zhao, K.; Zhang, Q.; Wang, Tichang. Construction and performance test of a novel polarization sensor for navigation. Sensor. Actuat. A-Phys. 2008, 148, 75–82. [Google Scholar] [CrossRef]
- Sarkar, M.; Theuwissen, A. A Biologically Inspired cmos Image Sensor; Springer-Verlag Berlin Heidelberg: New York, NY, USA, 2013. [Google Scholar]
- Horvath, G.; Barta, A.; Gal, J.; Suhai, B.; Haiman, O. Ground-based full-sky imaging polarimetry of rapidly changing skies and its use for polarimetric cloud detection. Appl. Opt. 2002, 41, 543–559. [Google Scholar] [CrossRef] [PubMed]
- Chahl, J.; Mizutani, A. Biomimetic attitude and orientation sensors. IEEE Sensor. J. 2012, 12, 289–297. [Google Scholar] [CrossRef]
- Karman, S.B.; Diah, S.Z.M.; Gebeshuber, I.C. Bio-inspired polarized skylight-based navigation sensors: A review. Sensors 2012, 12, 14232–14261. [Google Scholar] [CrossRef] [PubMed]
- Sturzl, W.; Carey, N. A Fisheye Camera System for Polarisation Detection on Uavs. In Proceedings of Computer Vision-ECCV 2012 Workshops and Demonstrations, Florence, Italy, 7–13 October 2012; Volume 7584, pp. 431–440.
- Pomozi, I.; Horvath, G.; Wehner, R. How the clear-sky angle of polarization pattern continues underneath clouds: Full-sky measurements and implications for animal orientation. J. Exp. Biol. 2001, 204, 2933–2942. [Google Scholar] [PubMed]
- Pust, N.J.; Shaw, J.A. Digital all-sky polarization imaging of partly cloudy skies. Appl. Opt. 2008, 47, H190–H198. [Google Scholar] [CrossRef] [PubMed]
- Miyazaki, D.; Ammar, M.; Kawakami, R.; Ikeuchi, K. Estimating sunlight polarization using a fish-eye lens. IPSJ J. 2008, 49, 1234–1246. [Google Scholar]
- Suhai, B.; Horvath, G. How well does the rayleigh model describe the e-vector distribution of skylight in clear and cloudy conditions? A full-sky polarimetric study. J. Opt. Soc. Am. A 2004, 21, 1669–1676. [Google Scholar] [CrossRef]
- Kreuter, A.; Zangerl, M.; Schwarzmann, M.; Blumthaler, M. All-sky imaging: A simple, versatile system for atmospheric research. Appl. Opt. 2009, 48, 1091–1097. [Google Scholar] [CrossRef] [PubMed]
- Raymond, L.; Lee, J.; Samudio, O.R. Spectral polarization of clear and hazy coastal skies. Appl. Opt. 2012, 51, 7499–7508. [Google Scholar] [CrossRef] [PubMed]
- Kreuter, A.; Blumthaler, M. Feasibility of polarized all-sky imaging for aerosol characterization. Atmos. Meas. Tech. 2013, 6, 1845–1854. [Google Scholar] [CrossRef]
- Horvath, G.; Varju, D. Underwater refraction-polarization patterns of skylight perceived by aquatic animals through snell's wiindow of the flat water surface. Vision Res. 1995, 35, 1651–1666. [Google Scholar] [CrossRef] [PubMed]
- Sabbah, S.; Lerner, A.; Erlick, C.; Shashar, N. Under water polarization vision-a physical examination. Recent Res. Devel. Exp. Theor. Biol. 2005, 1, 123–176. [Google Scholar]
- Sabbah, S.; Barta, A.; Gál, J.; Horváth, G.; Shashar, N. Experimental and theoretical study of skylight polarization transmitted through snell’s window of a flat water surface. J. Opt. Soc. Am. A 2006, 23, 1978–1988. [Google Scholar] [CrossRef]
- Lerner, A.; Sabbah, S.; Erlick, C.; Shashar, N. Navigation by light polarization in clear and turbid waters. Philos. Tran. R. Soc. B: Biol. Sci. 2011, 366, 671–679. [Google Scholar] [CrossRef]
- You, Y.; Tonizzo, A.; Gilerson, A.A.; Cummings, M.E.; Brady, P.; Sullivan, J.M.; Twardowski, M.S.; Dierssen, H.M.; Ahmed, S.A.; Kattawar, G.W. Measurements and simulations of polarization states of underwater light in clear oceanic waters. Appl. Opt. 2011, 50, 4873–4893. [Google Scholar] [CrossRef] [PubMed]
- Lerner, A.; Shashar, N.; Haspel, C. Sensitivity study on the effects of hydrosol size and composition on linear polarization in absorbing and nonabsorbing clear and semi-turbid waters. J. Opt. Soc. Am. A 2012, 29, 2394–2405. [Google Scholar] [CrossRef]
- Brines, M.L.; Gould, J.L. Skylight polarization patterns and animal orientation. J. Exp. Biol. 1982, 96, 69–91. [Google Scholar]
- Gal, J.; Horvath, G.; Meyer-Rochow, V.B.; Wehner, R. Polarization patterns of the summer sky and its neutral points measured by full-sky imaging polarimetry in finnish lapland north of the arctic circle. Proc. R. Soc. Lond. A 2001, 457, 1385–1399. [Google Scholar] [CrossRef]
- Henze, M.J.; Labhart, T. Haze, clouds and limited sky visibility: Polarotactic orientation of crickets under difficult stimulus conditions. J. Exp. Biol. 2007, 210, 3266–3276. [Google Scholar] [CrossRef] [PubMed]
- Raymond, L.; Lee, J. Digital imaging of clear-sky polarization. Appl. Opt. 1998, 37, 1465–1476. [Google Scholar]
- Calibration Toolbox for Matlab. Available online: http://www.vision.caltech.edu/bouguetj/calib_doc/index.html (accessed on 4 March 2015).
- Wang, Y.; Hu, X.; Lian, J.; Zhang, L.; Xian, Z.; Ma, T. Design of a device for skylight polarization measurements. Sensors 2014, 14, 14916–14931. [Google Scholar] [CrossRef] [PubMed]
- Voss, K.J.; Liu, Y. Polarized radiance distribution measurements of skylight. I. System description and characterization. Appl. Opt. 1997, 36, 6083–6094. [Google Scholar] [CrossRef] [PubMed]
- Goldstein, D. Polarized Light; Marcel Dekker, Inc.: New York, NY, USA, 2003. [Google Scholar]
- Wang, D.; Liang, H.; Zhu, H.; Zhang, S. A bionic camera-based polarization navigation sensor. Sensors 2014, 14, 13006–13023. [Google Scholar] [CrossRef] [PubMed]
- Berry, M.V.; Dennis, M.R.; Lee, R.L., Jr. Polarization singularities in the clear sky. New J. Phys. 2004, 6, 1–14. [Google Scholar] [CrossRef]
- Blanco-Muriel, M.; Alarcon-Padilla, D.C.; Lopezmoratalla, T.; Lara-coira, M. Computing the solar vector. Sol. Energy 2001, 70, 431–441. [Google Scholar] [CrossRef]
- Kiryati, N.; Gofman, Y. Detecting symmetry in grey level images: The global optimization approach. Int. J. Comput. Vision 1998, 29, 29–45. [Google Scholar] [CrossRef]
- Shabayek, A.E.R. Combining Omnidirectional Vision with Polarization Vision for Robot Navigation. Ph.D. Thesis, Universite de Bourgogne, Dijon, France, 2012. [Google Scholar]
- Bohren, C.F.; Huffman, D.R. Absorption and Scattering of Light by Smalll Particles; John Wiley & Sons, Inc.: New York, NY, USA, 1983. [Google Scholar]
- Gruev, V.; Perkins, R.; York, T. CCD polarization imaging sensor with aluminum nanowire optical filters. Opt. Express 2010, 18, 19087–19094. [Google Scholar] [CrossRef] [PubMed]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, T.; Hu, X.; Zhang, L.; Lian, J.; He, X.; Wang, Y.; Xian, Z. An Evaluation of Skylight Polarization Patterns for Navigation. Sensors 2015, 15, 5895-5913. https://doi.org/10.3390/s150305895
Ma T, Hu X, Zhang L, Lian J, He X, Wang Y, Xian Z. An Evaluation of Skylight Polarization Patterns for Navigation. Sensors. 2015; 15(3):5895-5913. https://doi.org/10.3390/s150305895
Chicago/Turabian StyleMa, Tao, Xiaoping Hu, Lilian Zhang, Junxiang Lian, Xiaofeng He, Yujie Wang, and Zhiwen Xian. 2015. "An Evaluation of Skylight Polarization Patterns for Navigation" Sensors 15, no. 3: 5895-5913. https://doi.org/10.3390/s150305895
APA StyleMa, T., Hu, X., Zhang, L., Lian, J., He, X., Wang, Y., & Xian, Z. (2015). An Evaluation of Skylight Polarization Patterns for Navigation. Sensors, 15(3), 5895-5913. https://doi.org/10.3390/s150305895