3.1. Framework Description of the Proposed Method
As discussed in
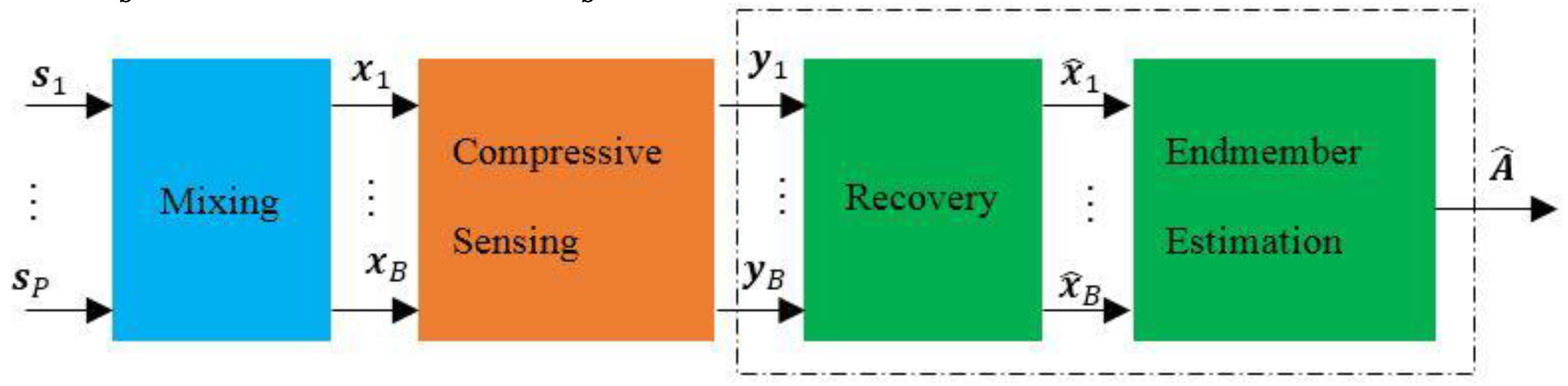
Section 2, if we can estimate endmembers directly from the compressive HSI data without recovering the images, omitting the recovery step will greatly reduce the complexity of computation; we will obtain a much better estimation speed and possibly also a better estimation accuracy.
The compressive observation of HSI is denoted as follows:
where
can be regarded as the compressive measurement of the source
.
The value
is the compressive measurement of mixture
, and it is also the mixture of all of the
.
is the element of matrix
at row
column
.
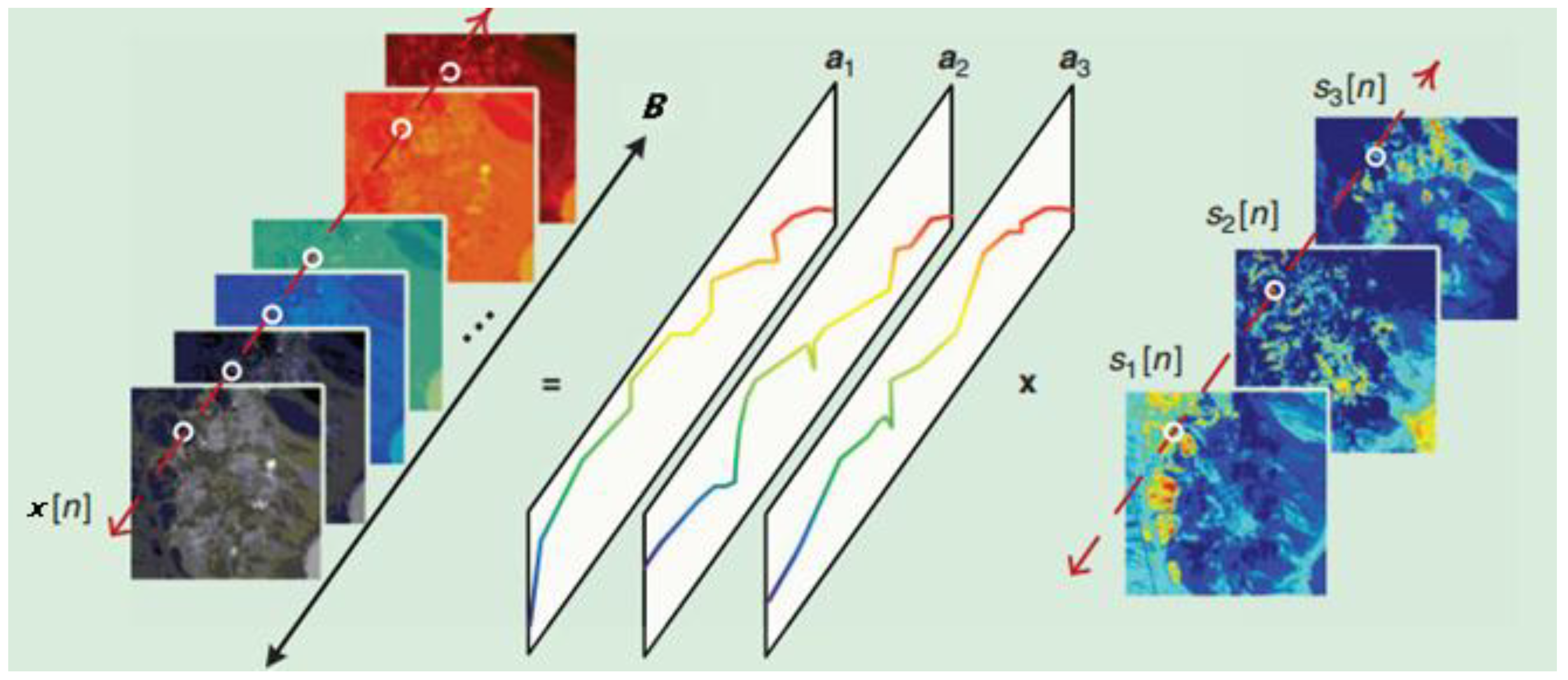
Equation (14) can be considered as LMM, as shown in Equation (3). Thus, we wish to estimate the endmember matrix
directly via CG approaches such as PPI, N-FINDR, VCA, and MVCA.
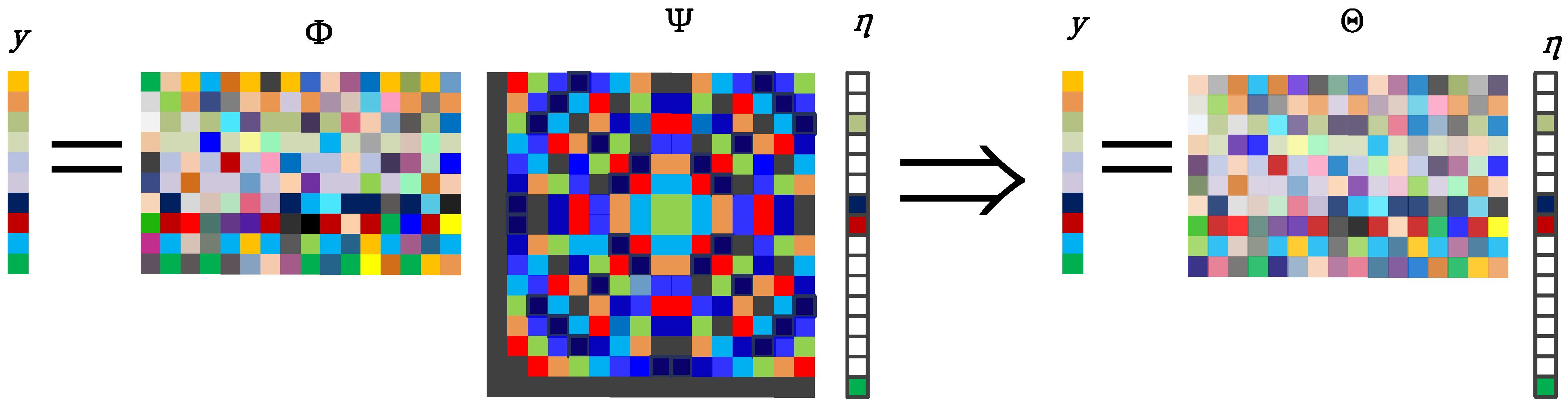
Unfortunately, the properties of the measurement matrix
make it impossible to directly use the CG approaches on Equation (14). Incoherence is a critical property indicating that the structures of the measurement matrix used in CS that, unlike the signals of interest, have a dense representation in the basis
, and random matrices are largely incoherent with any fixed basis
, making the sensing matrix
hold RIP with overwhelming probability [
7]. Hence,
is not sparse in basis
, and
(similar to the definition of
in
Section 2.1) cannot hold the non-negative and full additivity constraints, as shown in Equation (2), due to its dense and random character. We can see that:
is the element in matrix
at column
row
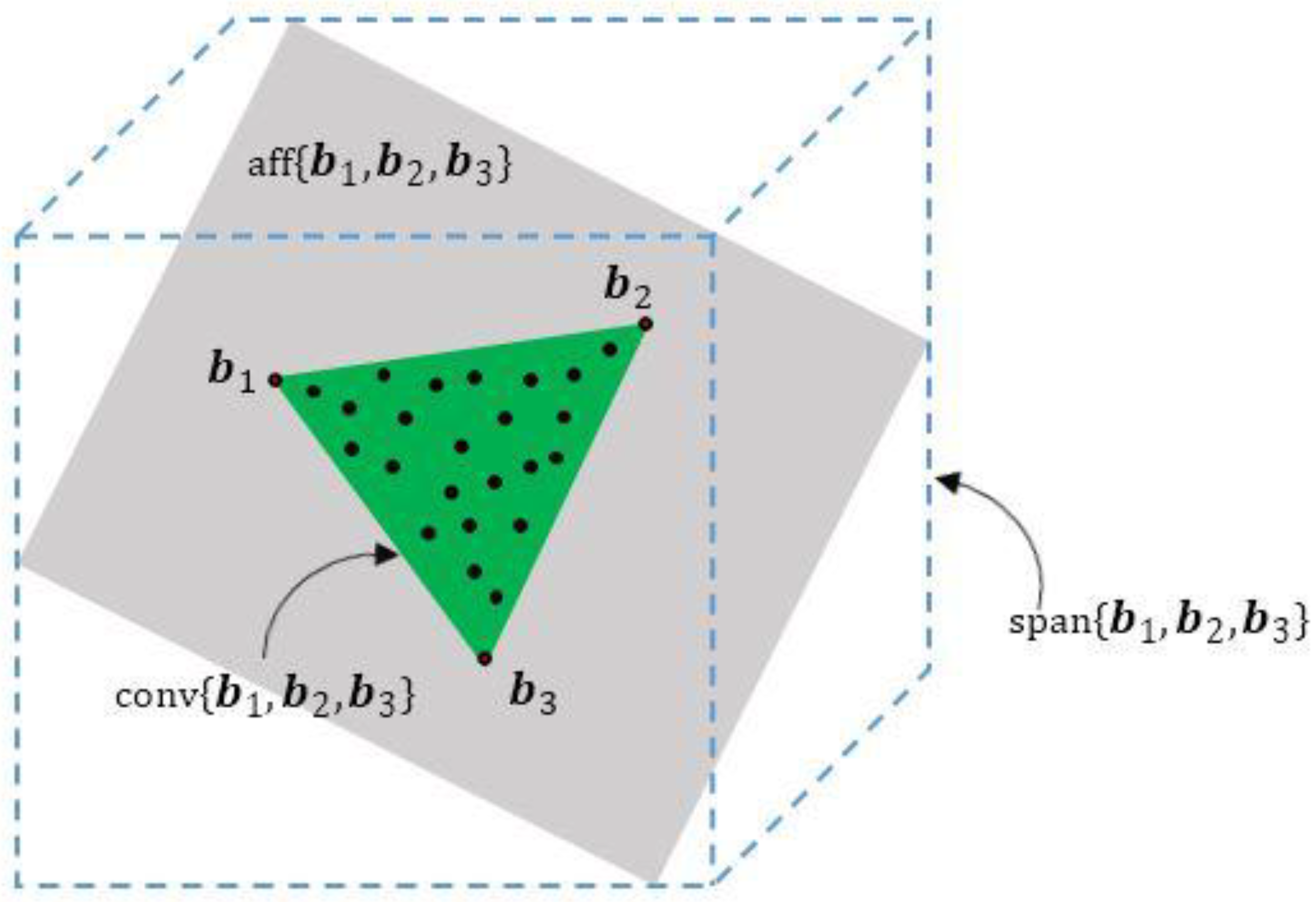
. From Equation (15), we can see that
is not a convex hull, and
is not a convex combination of endmember signatures. Actually,
is the space spanned by
(see
Figure 2 for the relationship between the spanned space and the convex hull), and
is a point in the space. In this condition, the endmember signatures
are no longer vertices of a simplex, which means that we cannot use CG approaches to estimate the endmembers directly.
To the knowledge of the authors and the referenced materials, we have not found a measurement matrix that not only satisfies the incoherence (or RIP), but also makes
sparse in basis
or
hold the non-negative and full additivity constraints. It seems impossible to estimate endmembers from compressive HSI data directly.
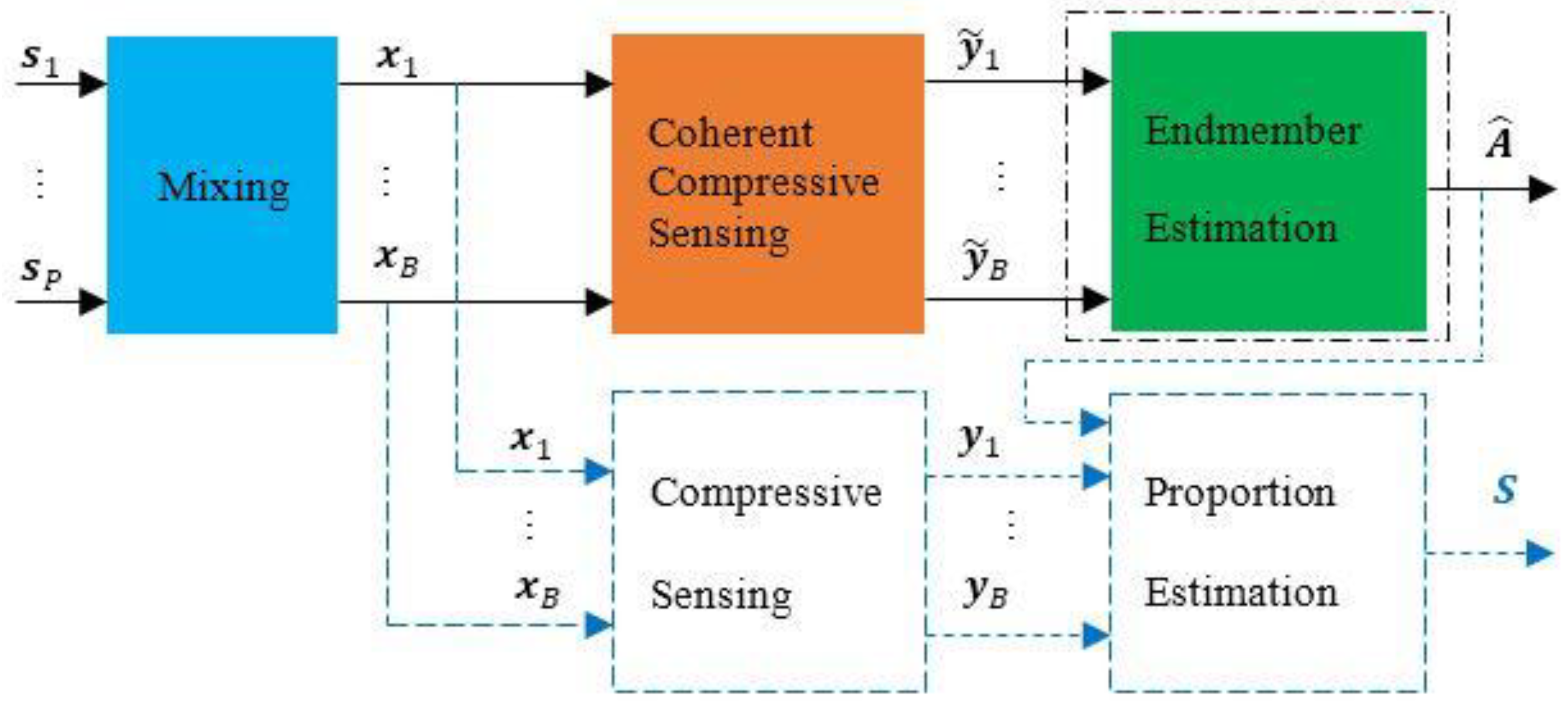
We propose a novel method, as shown in
Figure 6. A coherent measurement matrix is used to compressively measure the HSI, and the endmembers can be directly estimated from the observations.
Figure 6.
The framework of the proposed method.
Figure 6.
The framework of the proposed method.
First, we design a coherent measurement matrix that makes
hold the non-negative and full additivity constraints.
The coherent matrix that does not hold the RIP cannot be used for exact and robust signal recovery, as mentioned above. In this paper, the aim is to estimate endmembers directly from the compressive HSI data, not to recover the HSI data. Therefore, we do not have to use an incoherent matrix (meaning, we do not have to use a random matrix). We give an example of such a coherent matrix. Let
be an identity matrix. We construct the measurement matrix using parts of
. For example, we select one row in every
rows from
to compose
(the compression ratio is
,
, where round() is the operation of rounding towards the nearest integer). It is clear that
holds the non-negative and full additivity constraints. With this kind of measurement matrix, it is possible to use CG approaches, such as PPI or VCA, to estimate the endmembers directly by solving the problem shown in Equation (14).
Other measurement matrices
that make
in
hold the non-negative and full additivity constraints can be used in this proposed method.
This type of measurement matrix achieves undersampling of HSI. It will lose some proportion information. Therefore, the undersampled data cannot be used to recover the proportion information. If this information is required, one can recover it by the data captured by an incoherent measurement matrix, as shown in
Figure 6.
In this paper, we use the VCA algorithm to estimate the endmembers directly in the proposed method. We assume the presence of pure pixels in the undersampled data as required by VCA, and we also assume the presence of all of the materials in the data. These assumptions are easy to realize for the increasing spatial resolution of hyperspectral sensors.
In the proposed method, we first use a coherent measurement matrix to compressively sense HSI and then use the VCA method to estimate the endmember directly from the HSI observations without recovering the images, which is a necessary step in the traditional method. As shown in the dashed parts in
Figure 6, if the proportion information
is required, one can use another incoherent measurement matrix to capture the global information of HSI, which can be used along with the estimated endmembers
to recover the proportions [
5,
20].
3.2. Analysis of the Computational and Memory Complexity
Under the linear observation model, HSI data are in a subspace of dimension
. Typically,
is far less than
. The dimensionality
ranges from around 100 to 250, whereas
ranges from about 3 to 20 [
29]. In the VCA algorithm, the HSI data dimensionality is reduced by PCA or SVD. The computational complexity of the proposed method is
) [
16].
The traditional methods used in this paper are SOMP-VCA (SOMP for HSI data recovery and VCA for endmember estimation) and OMP-MVCA. The computational complexity of the SOMP is
), where
is the sparsity of the signals. Typically,
and
are both larger than
, so
. The computational complexity of VCA used in the traditional method is
) (each spectral image length is
, while the length of the compressive spectral image in the proposed method is
). The total computational complexity of the traditional method is
). In most cases,
, so the complexity can be simply denoted as
. The computational complexity of the SOMP-VCA is much larger than that of the proposed method.
, and thus, we can see that the computational complexity of the traditional method is larger than that of the proposed method, even if we use other CS recovery methods besides the SOMP algorithm. The computational complexity of OMP is
) when
, otherwise, the computational complexity is the larger one of
and
). The computational complexity of MVCA is smaller than that of VCA. So the complexity of OMP-MVCA is dominated by OMP.
In the proposed method, the memory required is
due to dimensionality reduction and data compression. In the SOMP-VCA method, the memory required by SOMP is
and the memory required by VCA is
.
; therefore, the memory required by the SOMP-VCA method can simply be
, which is much larger than that of the proposed method. Similar to the analysis of SOMP-VCA, the memory required by OMP-MVCA is simply
.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










