
A Method for Remotely Sensing Vital Signs of Human Subjects Outdoors

 , and
, and
Abstract
:1. Introduction
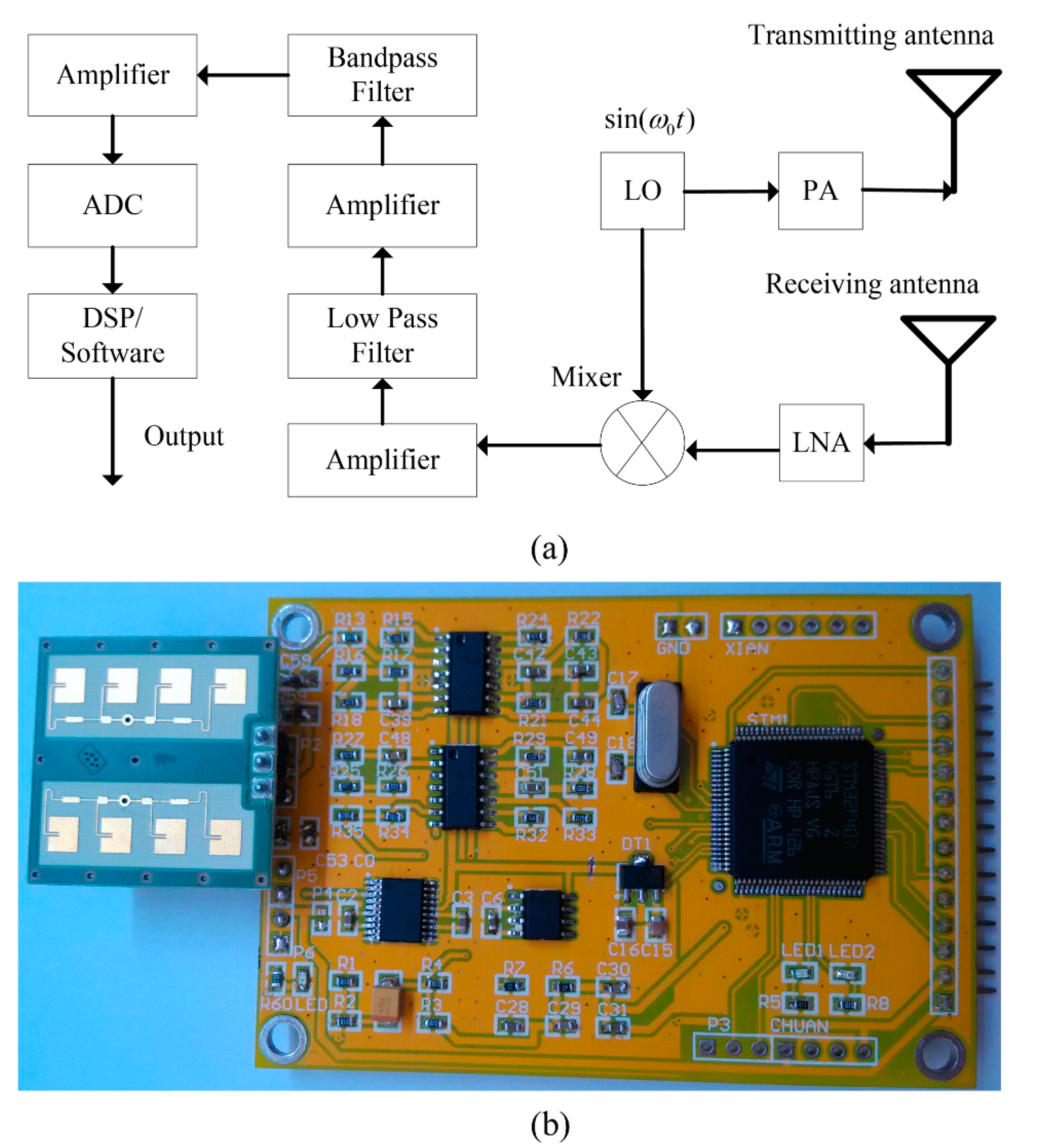
2. Description of the 24 GHz Doppler Radar Sensor

3. Signal Recording and Processing

3.1. Removal of Baseline and Clutter Reduction

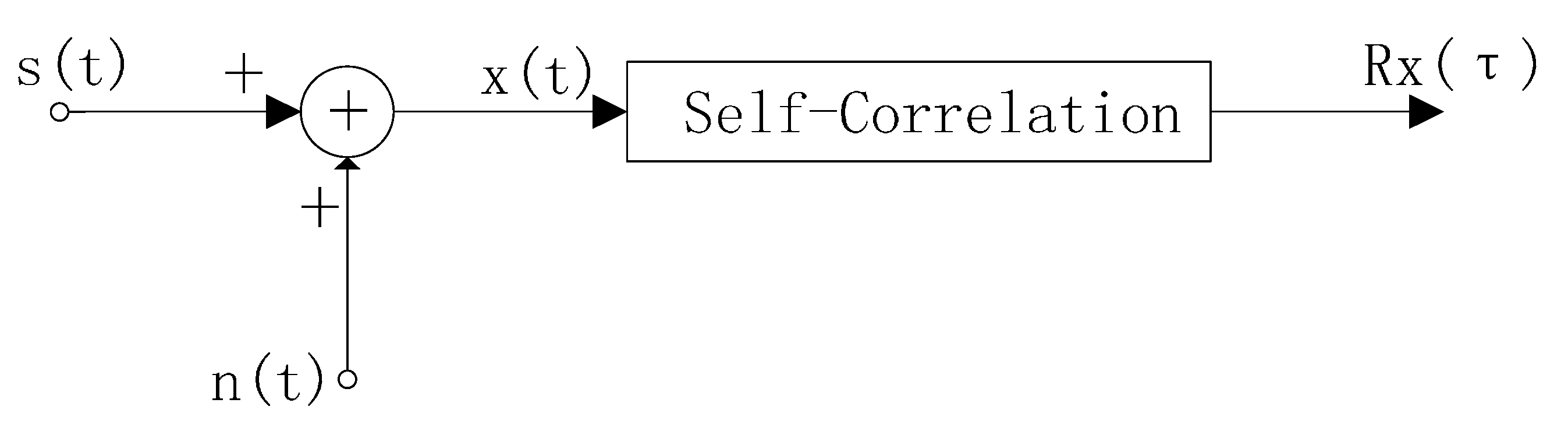
3.2. Signal Self-Correlation

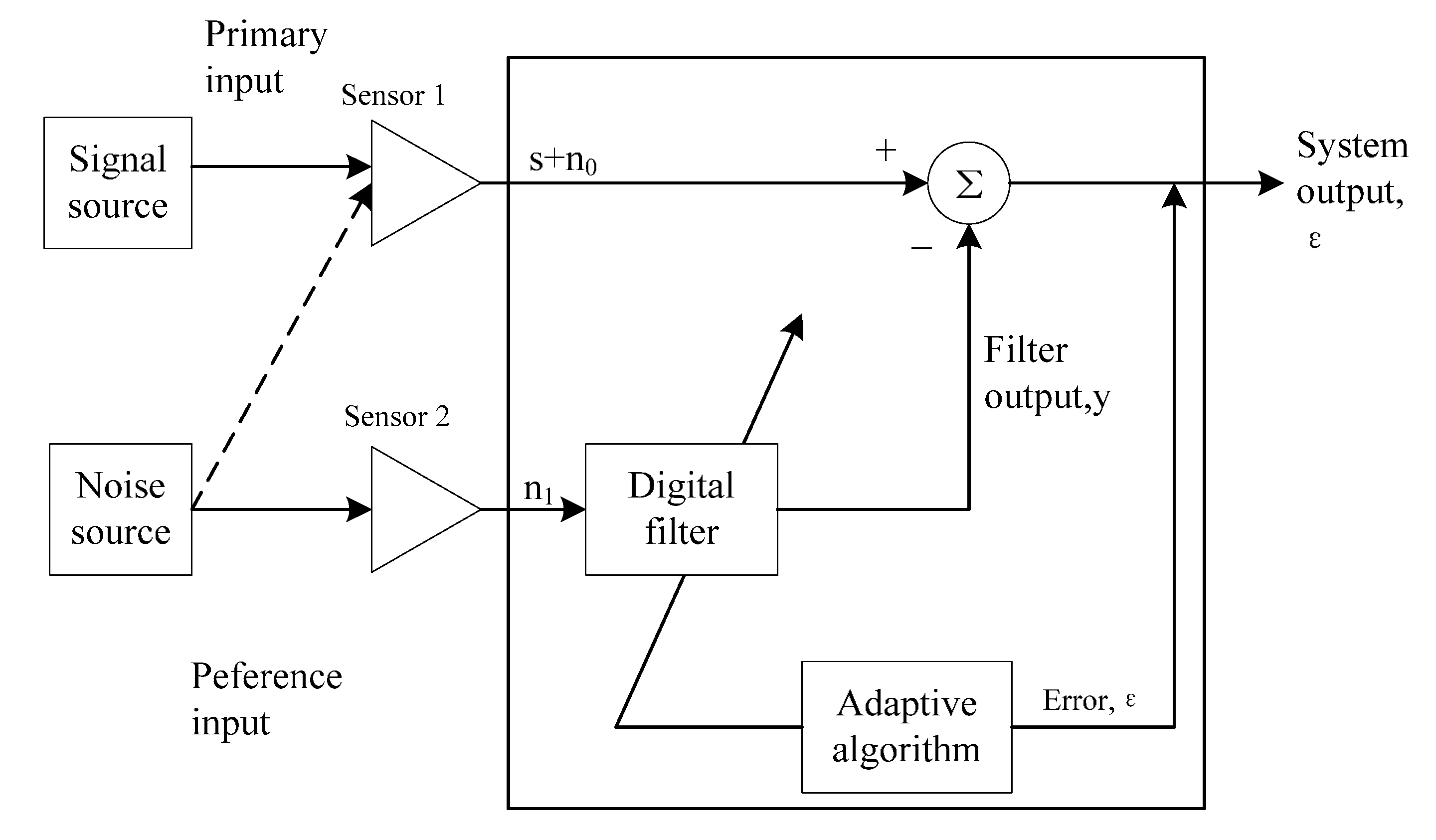
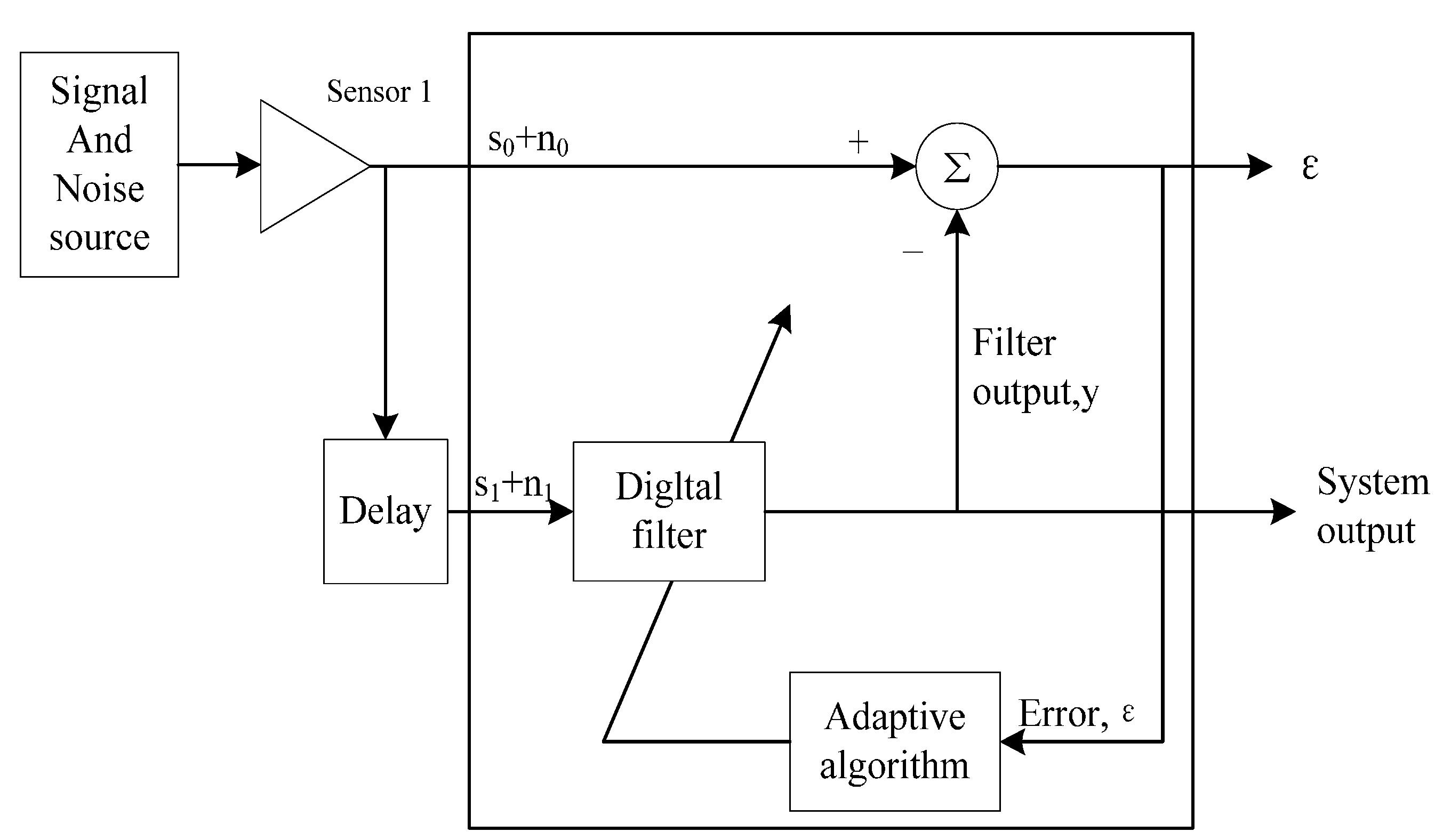
3.3. Adaptive Linear Enhancement


4. Results and Discussion
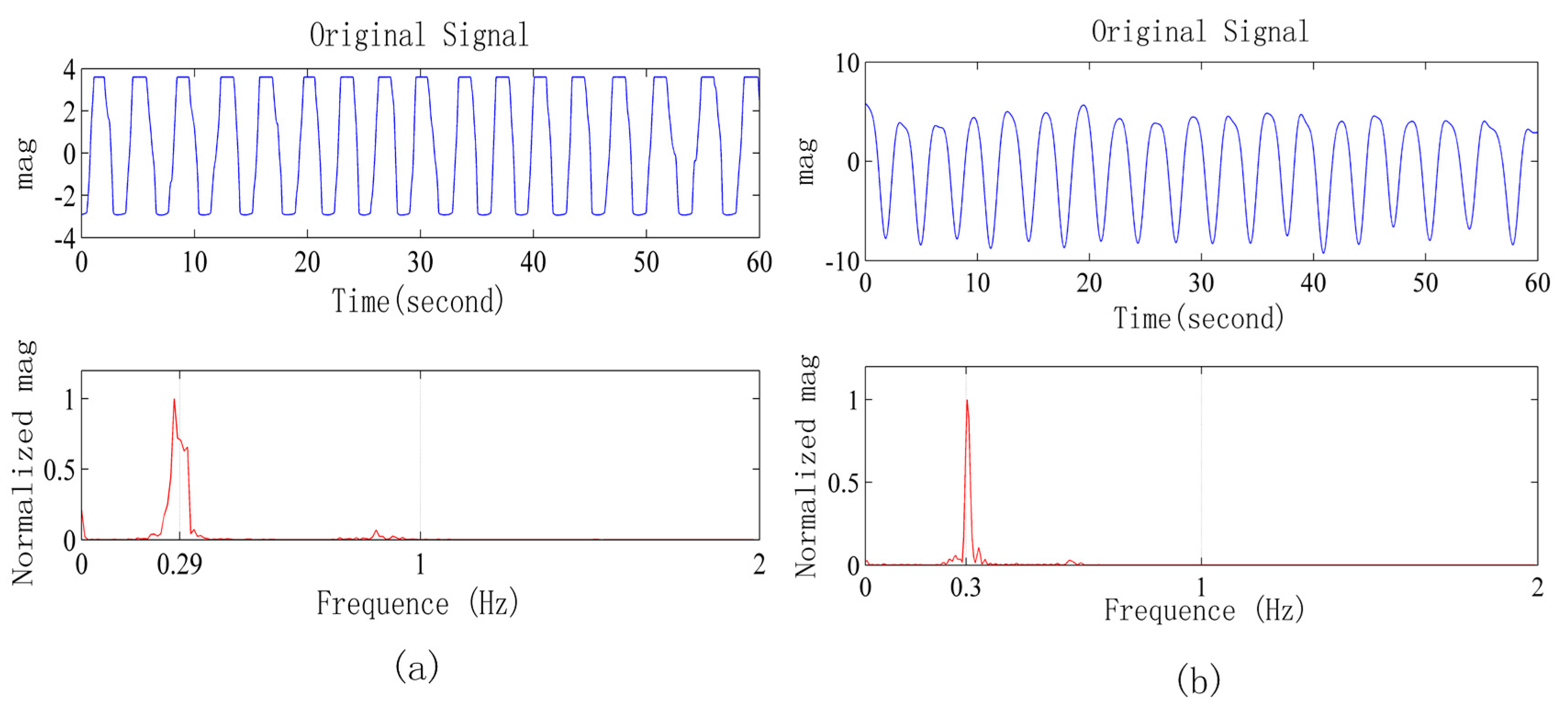
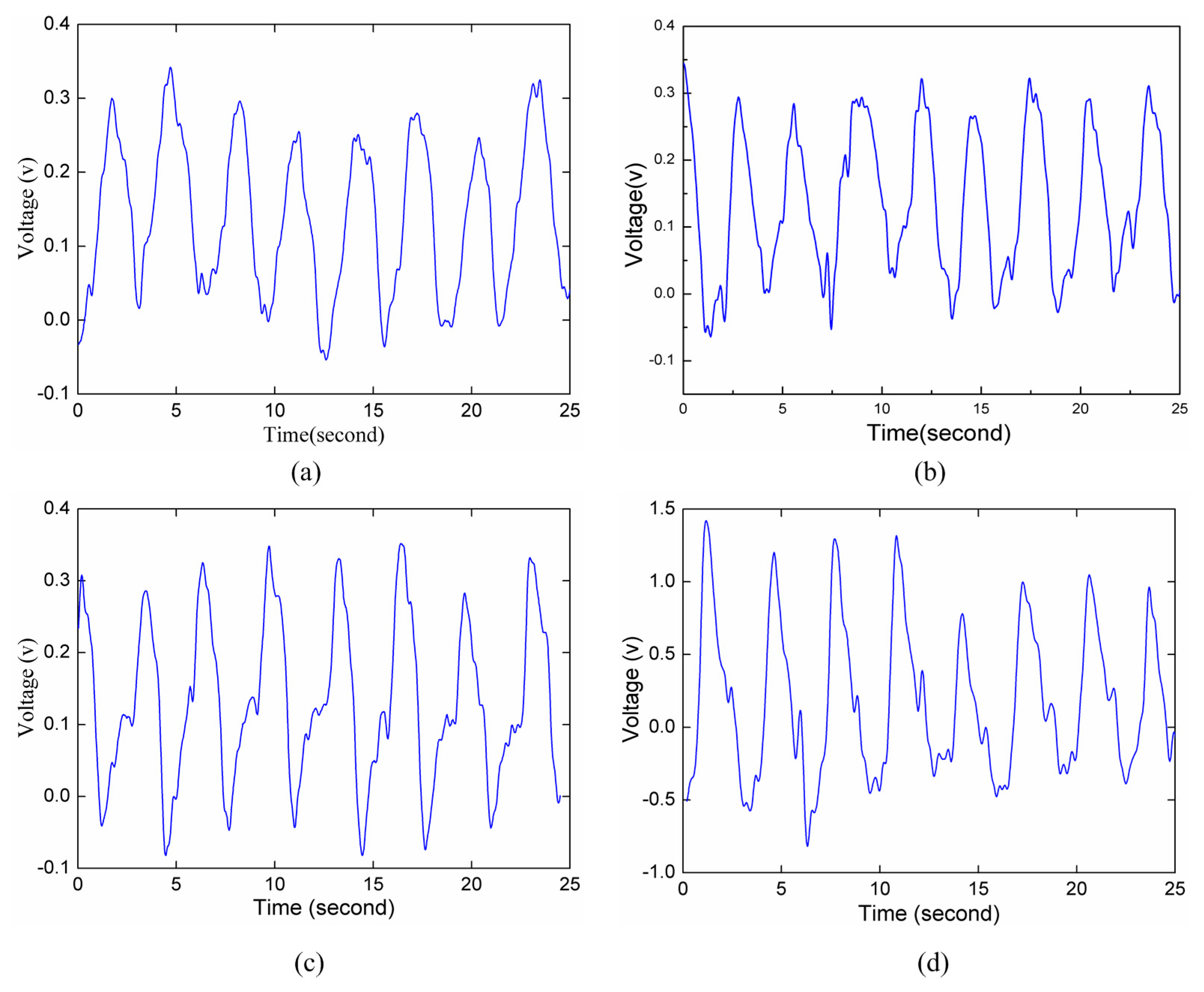
4.1. Indoor Experiments


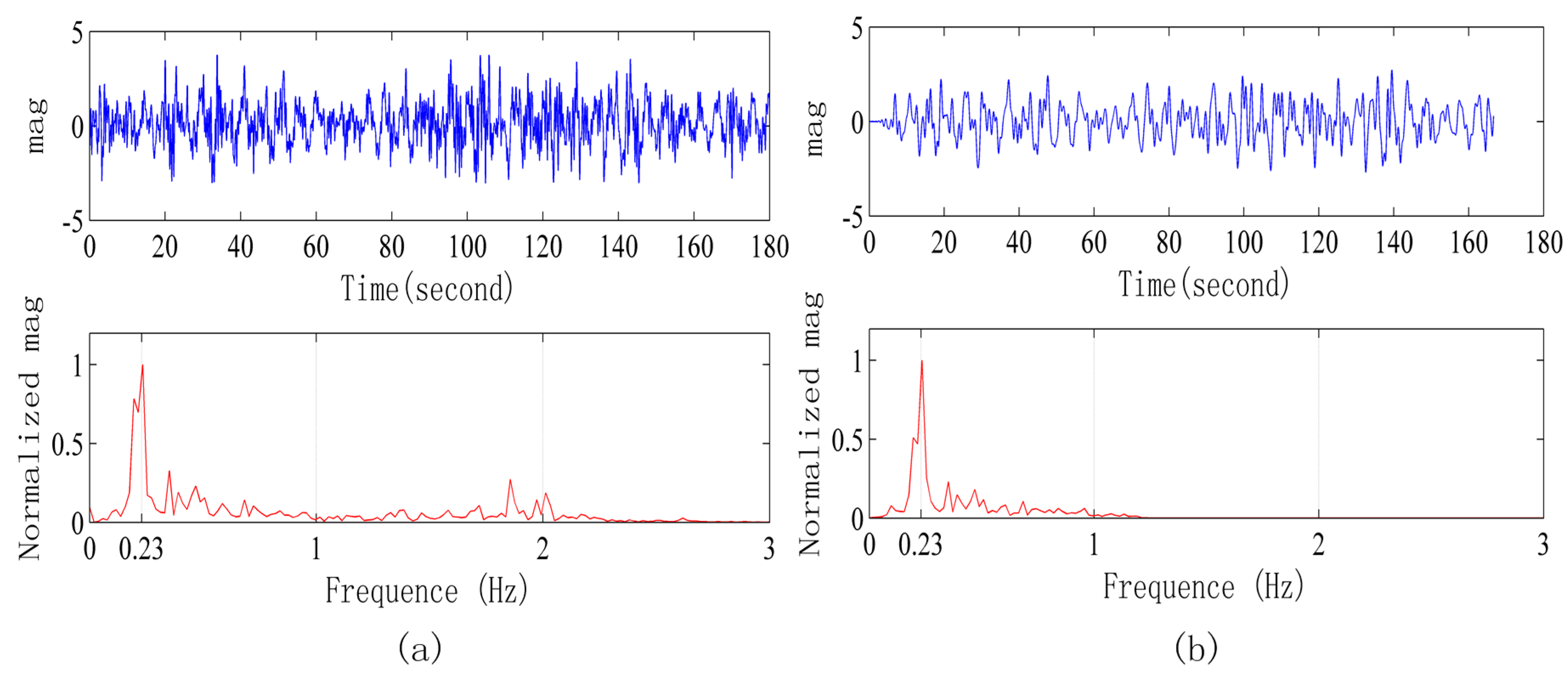
4.2. Outdoor Experiments





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR | Person (3 m) | Person (5 m) | Person (7 m) | No Person |
|---|---|---|---|---|
| Original Signal | −7.82 dB | −8.13 dB | −18.31 dB | −19.21 dB |
| After Processing | 12.39 dB | 13.71 dB | 10.08 dB | −1.33 dB |
| After Processing(FIR replacing ALE) | 6.76 dB | 11.27 dB | 3.27 dB | 2.76 dB |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Nickerson, R.S. Roles of human factors and ergonomics in meeting the challenge of terrorism. Am. Psychol. 2011, 66, 555–566. [Google Scholar] [PubMed]
- Qian, K.; Song, A.; Bao, J.; Zhang, H. Small teleoperated robot for nuclear radiation and chemical leak detection. Int. J. Adv. Robot. Syst. 2012. [Google Scholar] [CrossRef]
- Wang, G.; Munoz-Ferreras, J.-M.; Gu, C.; Li, C.; Gomez-Garcia, R. Application of Linear-Frequency-Modulated Continuous-Wave (LFMCW) Radars for Tracking of Vital Signs. IEEE Trans. Microw. Theory Tech. 2014, 62, 1387–1399. [Google Scholar] [CrossRef]
- Li, C.; Lubecke, V.M.; Boric-Lubecke, O.; Lin, J. A Review on Recent Advances in Doppler Radar Sensors for Noncontact Healthcare Monitoring. IEEE Trans. Microw. Theory Tech. 2013, 61, 2046–2060. [Google Scholar] [CrossRef]
- Diebold, S.; Ayhan, S.; Scherr, S.; Massler, H.; Tessmann, A.; Leuther, A.; Ambacher, O.; Zwick, T.; Kallfass, I. A W-Band MMIC Radar System for Remote Detection of Vital Signs. J. Infrared Millim. Terahertz Waves 2012, 33, 1250–1267. [Google Scholar] [CrossRef]
- Gu, C.; Li, C.; Lin, J.; Long, J.; Huangfu, J.; Ran, L. Instrument-Based Noncontact Doppler Radar Vital Sign Detection System Using Heterodyne Digital Quadrature Demodulation Architecture. IEEE Trans. Instrum. Meas. 2010, 59, 1580–1588. [Google Scholar]
- Gu, C.; Li, C. Assessment of Human Respiration Patterns via Noncontact Sensing Using Doppler Multi-Radar System. Sensors 2015, 15, 6383–6398. [Google Scholar] [CrossRef] [PubMed]
- Kagawa, M.; Ueki, K.; Kurita, A.; Tojima, H.; Matsui, T. Non-contact screening system with two microwave radars in the diagnosis of sleep apnea-hypopnea syndrome. Stud. Health Technol. Inform. 2013, 192, 263–267. [Google Scholar] [PubMed]
- Geisheimer, J.; Greneker, E., III. A non-contact lie detector using radar vital signs monitor (RVSM) technology. IEEE Aerosp. Electron. Syst. Mag. 2001, 16, 10–14. [Google Scholar] [CrossRef]
- Mikhelson, I.V.; Bakhtiari, S.; Elmer, T.W.; Sahakian, A.V. Remote sensing of heart rate and patterns of respiration on a stationary subject using 94-GHz millimeter-wave interferometry. IEEE Trans. Biomed. Eng. 2011, 58, 1671–1677. [Google Scholar] [CrossRef] [PubMed]
- Kazemi, S.; Ghorbani, A.; Amindavar, H.; Li, C. Cyclostationary approach to Doppler radar heart and respiration rates monitoring with body motion cancelation using Radar Doppler System. Biomed. Signal Process. Control 2014, 13, 79–88. [Google Scholar] [CrossRef]
- Quinn, B.G.; Hannan, E.J. The Estimation and Tracking of Frequency; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
- Mostafanezhad, I.; Yavari, E.; Boric-Lubecke, O.; Lubecke, V.M.; Mandic, D.P. Cancellation of unwanted Doppler radar sensor motion using empirical mode decomposition. IEEE Sens. J. 2013, 13, 1897–1904. [Google Scholar] [CrossRef]
- Lazaro, A.; Girbau, D.; Villarino, R. Techniques for Clutter Suppression in the Presence of Body Movements during the Detection of Respiratory Activity through UWB Radars. Sensors 2014, 14, 2595–2618. [Google Scholar] [CrossRef] [PubMed]
- McCool, J.M.; Widrow, B.; Zeidler, J.R.; Hearn, R.H.; Chabries, D.M. Adaptive Line Enhancer. U.S. Patent US4238746, 9 December 1980. [Google Scholar]
- Belouchrani, A.; Abed-Meraim, K.; Cardoso, J.-F.; Moulines, E. A blind source separation technique using second-order statistics. IEEE Trans. Signal Process. 1997, 45, 434–444. [Google Scholar] [CrossRef]
- Huang, N.; Shen, Z.; Long, R.; Wu, M.; Zheng, Q.; Yen, N.; Tung, C. The empirical mode decomposition and Hilbert spectrum for nonlinear and nonstationary time series analysis. Proc. A 1998. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Chen, F.; Jin, J.; Lv, H.; Li, S.; Lu, G.; Wang, J. A Method for Remotely Sensing Vital Signs of Human Subjects Outdoors. Sensors 2015, 15, 14830-14844. https://doi.org/10.3390/s150714830
Li C, Chen F, Jin J, Lv H, Li S, Lu G, Wang J. A Method for Remotely Sensing Vital Signs of Human Subjects Outdoors. Sensors. 2015; 15(7):14830-14844. https://doi.org/10.3390/s150714830
Chicago/Turabian StyleLi, Chuantao, Fuming Chen, Jingxi Jin, Hao Lv, Sheng Li, Guohua Lu, and Jianqi Wang. 2015. "A Method for Remotely Sensing Vital Signs of Human Subjects Outdoors" Sensors 15, no. 7: 14830-14844. https://doi.org/10.3390/s150714830
APA StyleLi, C., Chen, F., Jin, J., Lv, H., Li, S., Lu, G., & Wang, J. (2015). A Method for Remotely Sensing Vital Signs of Human Subjects Outdoors. Sensors, 15(7), 14830-14844. https://doi.org/10.3390/s150714830