1. Introduction
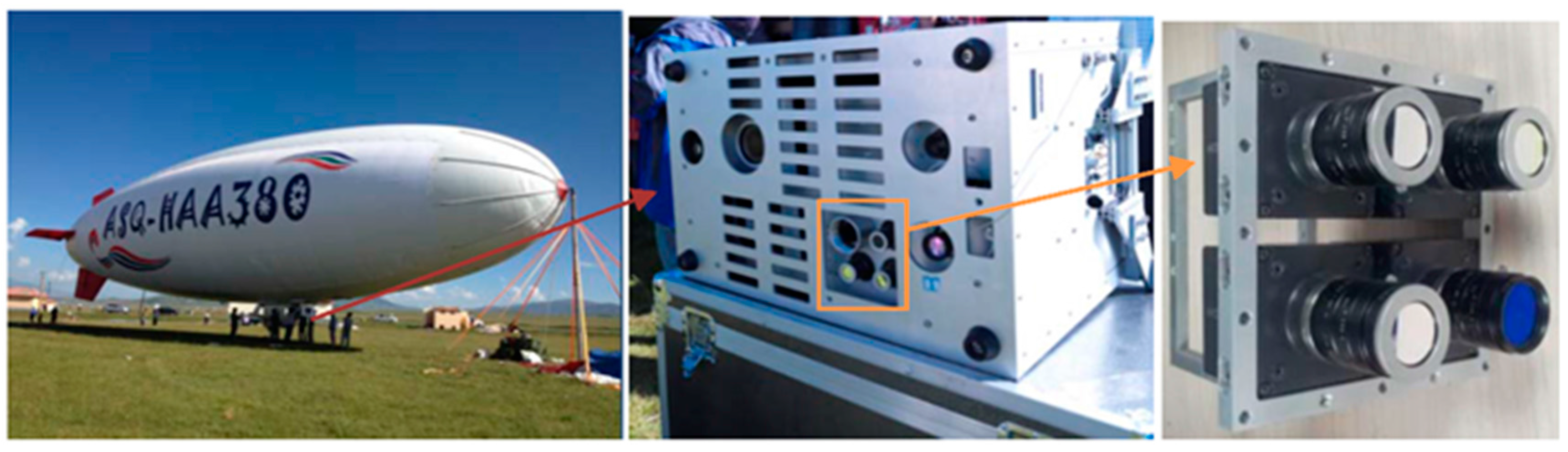
With the rapid development of unmanned aerial vehicle (UAV) technology, we urgently need a low cost multispectral system which can acquire multispectral images at the wavelengths based on actual requirements. Our research group developed an airborne high resolution multispectral system (
Figure 1) which is mainly composed of a set of digital video recorders (DVR), a ruggedized Getac B300 PC, four identical Hitachi KPF120CL monochrome cameras (2/3 inch Interline type, Progressive Scan CCD), and four bandpass filters. The four identical monochrome cameras are sensitive in the 400 to 1000 nm spectral range, have the capability of obtaining 8-bit images with 1392 × 1040 pixels, and are respectively equipped with near-infrared (800 nm), red (650 nm), green (550 nm) and blue (450 nm) bandpass filters. As a result, it has the flexibility to change filters to acquire other band images in the 400 to 1000 nm spectral range for specific requirements. Because the four cameras are independent, it has the advantage that each camera can be individually adjusted for optimum focus and aperture setting. However, for the multiple optical systems, it is nearly impossible to align different band images taken by the cameras at one exposal optically or mechanically [
1], so a registration method is needed.
Figure 1.
The four-camera multispectral mapping system.
Figure 1.
The four-camera multispectral mapping system.
In recent years, many multispectral mapping systems were developed. For example, a multispectral image system called MS4100 (Geospatial Systems, Inc., West Henrietta, NY, USA) used a beam splitting prism and three charge coupled device (CCD) sensors to acquire images in three spectral bands within the 400–1100 nm. Although the alignment issue may become easier, it is difficult to change the band-pass filters once integrated. Oppelt [
2] introduced an imaging system. As with the MS4100, once it is integrated, the band images at other wavelengths cannot be acquired. A complex imaging system equipped with a lens, a cold mirror, a beamsplitter, three rear lens units, three filters and three monochrome cameras was introduced by Kise [
3]. It is not easy to change filters and hard to extend to get other band images at different wavelengths. Everitt [
4] proposed a multispectral digital video system which is comprised of three video CCD analog video cameras and three filters. Its hardware design and video data synchronization acquisition were introduced in detail. Gorsevski [
5] designed an airborne mapping system that can provide valuable experiential learning opportunities for students. It is a very complex system, and the multispectral system is only one of its subsystems. Most of these four papers focus on hardware design and data synchronization acquisition but fail to introduce alignment methods in detail. Honkavaara [
6] introduced a complex weight UAV spectral camera. This spectral camera acquires different band images by changing its air gap. The dislocation between different bands depends on flight speed and flying height. Due to different structures, its band matching methods are not very suitable for our multispectral system. Yang [
7,
8] used first-order and second-order polynomial transformation models to register band images and successfully obtained multispectral images. However, the polynomial model is just a generic registration model; the structural characteristics of the system itself were not fully considered, so the transformation may not be modeled properly. In addition, the method to generate matching points has not been introduced.
Due to great altitude and limited undulating ground, this paper considers the land surface as a plane and has proved that the homography registration model is very suitable. Currently, many papers [
9,
10,
11,
12,
13] use SIFT [
14,
15] and RANSAC [
16] to get the parameters of transformation models. The RANSAC algorithm is a learning technique to estimate parameters of a specific model by random sampling of observed data and uses a voting scheme to find the optimal fitting result; the voting scheme is based on an assumption that there are enough inliers (correct matches in this paper) to satisfy the specific model. When the number of inliers is less than 50% [
17], it usually performs badly. However, the different band images acquired by our system differ from each other in the image intensity, and the correct rate of initial matches declines rapidly. Especially for pairs including an infrared band image and a visible band image, the correct rate is even less than 10% if the images comprise a considerable part of vegetation and very few manmade objects. So, the RANSAC cannot be used directly. Very few papers focused on registering pairs of infrared images and visible images. In light of this, according to the structural characteristics of the four-camera multispectral system, this paper proposed an effective method to remove most of the false matches and greatly increase the correct rate, and then uses the RANSAC to eliminate the remaining false matches. Finally, parameters of the registration model are calculated using the least squares method. Experiments show that this method does not only improve the registration performance, but also solves the matching problem between near-infrared images and visible images in the case of lack of manmade objects.
This article developed an airborne high resolution four-camera multispectral system, proposed an excellent registration method and introduces this method in detail. The second part describes the derivation of the matching model and its parameters calculation method; the third part introduces the method of eliminating false matches; the fourth part shows the different band image registration experiments; the fifth part shows the data acquisition and accuracy assessment; and the final part gives a conclusion.
3. Rejecting False Matches
Image feature points are extracted by the SIFT detector. The SIFT feature is a kind of local feature of digital images using 128-dimensional vectors to describe feature points. It maintains invariance of scaling and rotation and also keeps a certain degree of stability with change of brightness, the viewing change, affine transformation and noise. It consists of four major stages: (1) scale-space peak selection; (2) keypoint localization; (3) orientation assignment; and (4) keypoint descriptor. There are a lot of false matches in the initial matches, so the SIFT initial matches cannot be used to calculate the parameters of the transformation model directly. The conventional approach is to apply RANSAC to eliminate false matches. The RANSAC method is based on the random sampling theory and requires the correct rate of initial matches higher than 50%. In general, the correct rate of initial matches can satisfy the requirement of the RANSAC, such as a pair of adjacent aerial images. However, owing to the four monochrome cameras equipped with different bandpass filters lead to the significant difference in the image intensity among different band images. Thus the number of incorrect matches will increase rapidly and the correct rate will decline sharply, especially for pairs of infrared and visible images. If the image is full of vegetation, the variation of the intensity between pairs of infrared and visible images is more significant. In this case, the correct rate is very low, and the RANSAC is not reliable.
In light of this situation, based on the structural characteristics of the multispectral system, the paper presents an effective method to eliminate most of the false matches and to improve the correct rate for meeting the requirement of the RANSAC. The principle of the method is as follows.
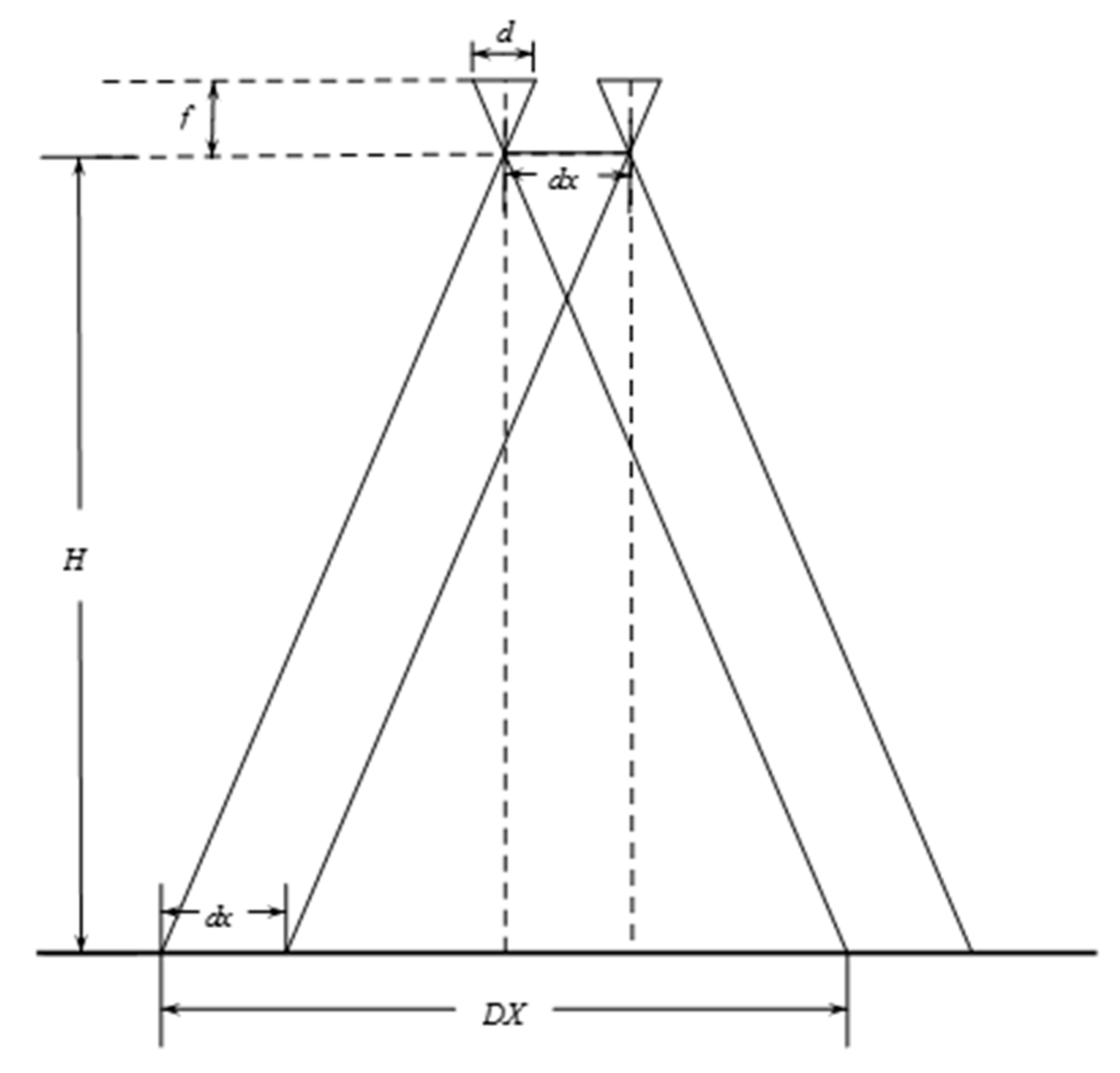
Figure 2 shows two cameras of the four-camera system, the flying altitude
H, the focal length
f, and the length of CCD
d. The field of a camera can be described as Equation (8):
If the CCD has
M cells, the ground resolution can be calculated as Equation (9):
dx indicates the distance between the optical centers of the two cameras. If these two cameras are the same and parallel, the displacement between the fields of the two cameras also is
dx. The displacement between the two images taken by the two cameras in
X direction is
xcol, as Equation (10):
dx is 0.136 m, and
M is 1040 in
X direction; we could know that
f/d is 2.376 after calibrating the camera intrinsic parameters using the Camera Calibration Toolbox [
18]. To ensure the safety of the aircraft, we need the flying height to be large enough, at least 50 m, then
xrow is 5.74 pixels. Assuming that the height change of ground is less than 10 m, the stereo parallax will be less than 1.16 pixels. Therefore, the stereo effect can be ignored. Using the same method, we can also calculate the displacement in
Y direction
yrow.
Figure 2.
Schematic diagram of two camera imaging.
Figure 2.
Schematic diagram of two camera imaging.
If the flying height is fixed, there are no changes in flight attitude and no ups and downs on the ground, the camera plane parallels to the ground surface, the cameras are arrangement in parallel, there is no camera lenses distortion and CCD distortion, then the displacement (
xrow,
ycol) between the two images is fixed. If all of the
dx,
M,
d,
H and
f are known, the (
xrow,
ycol) can be calculated by using Equation (10) directly. However, if not all of these parameters are known, we need other methods. An effective histogram method is proposed, and we will describe it in
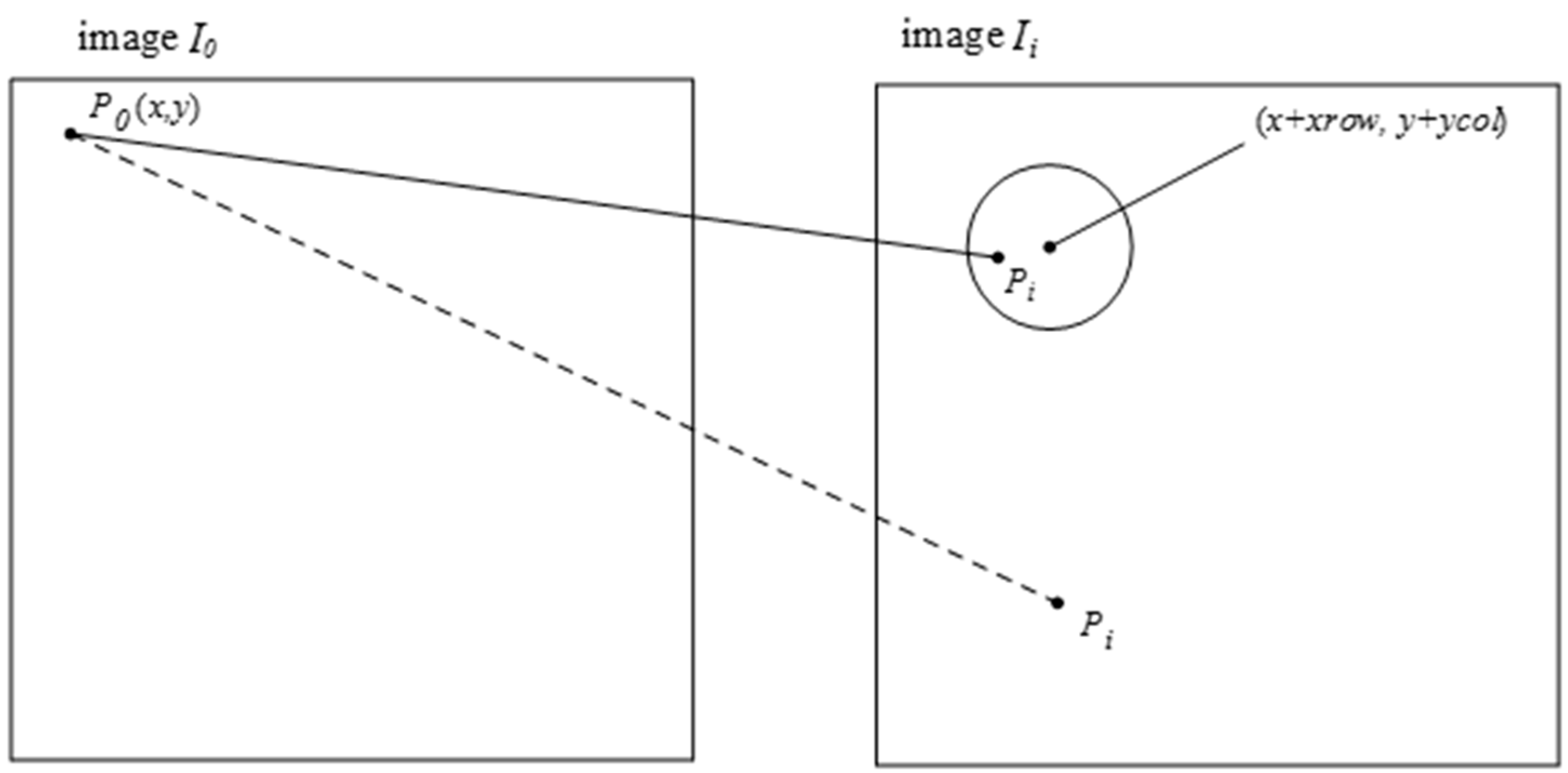
Section 4. For any feature point
p0 with coordinate (
x,
y) in reference image
I0, the coordinate of its matching point
pi is (
x + xrow,
y + ycol) in input image
Ii. Although these ideal situations do not occur in actuality, the influence of all these factors is limited for our multispectral system because the arrangement of the four cameras is almost parallel, as
Figure 1. So, it can be estimated that
pi is near (
x + xrow,
y + ycol) in the input image
Ii. We just need to set a threshold to check whether
pi is near (
x + xrow,
y + ycol). If the threshold is too low, some correct matches can be rejected. And, if it is too high, the removed false matches will decrease. In this paper, the threshold is set to one tenth of the image size, 104 pixels. If the Euclidean distance between
pi and (
x + xrow,
y + ycol) is lower than this threshold, the match will be retained in this step, described as the solid line in
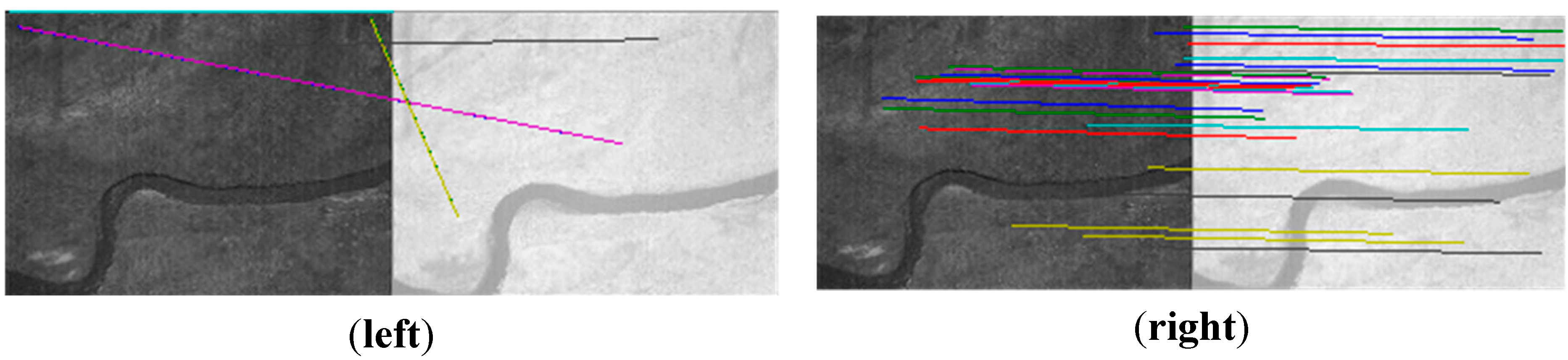
Figure 3; otherwise, it will be taken as a false matching point and be eliminated, described as the dotted line in
Figure 3. Due to this, the correct rate of initial matches will increase significantly and the RANSAC approach will become more reliable.
Figure 3.
The dotted line shows a false match because pi is too far away from (x + xrow, y + ycol). And, the match showed by the solid line will be remained.
Figure 3.
The dotted line shows a false match because pi is too far away from (x + xrow, y + ycol). And, the match showed by the solid line will be remained.
5. Four-Band Multispectral Data Acquisition and Accuracy Assessment
The multispectral mapping system was mounted on a metal protective box installed on an airship, named ASQ-HAA380, which was developed by our research group. On 18 August 2014, the research group carried a flight experiment in Haibei Tibetan Autonomous Prefecture, Qinghai Province, China, and the experimental scenario is shown in
Figure 10. Qinghai TV and many other media sources reported this experiment [
19]. The experimental data will be used mainly for pasture biomass assessment and the survey of urban green space in high altitude area. In order to guarantee the image quality of each multispectral camera, according to flight altitude and weather conditions, each camera was individually adjusted for optimum focus and aperture setting. Four different band images acquired by the multispectral system at one exposal are shown in
Figure 4 in the
Section 3, and their histograms are shown in
Figure 11. The histograms of these images from diverse target areas spread well within the dynamic range without saturation and indicate that the system is able to capture high quality multispectral data.
Figure 10.
Experimental scene and equipment installation.
Figure 10.
Experimental scene and equipment installation.
Figure 11.
Histograms of the four band images; (a–d) respectively the histograms of the infrared band, red band, green band and blue band.
Figure 11.
Histograms of the four band images; (a–d) respectively the histograms of the infrared band, red band, green band and blue band.
5.1. Experiment 1
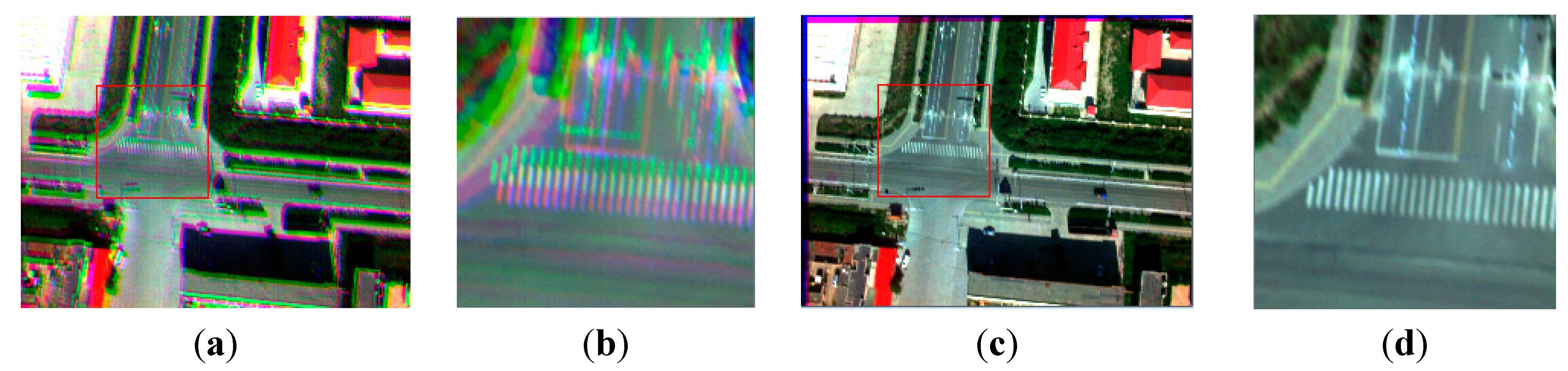
In this experiment, four images containing a lot of man-made objects are used, as shown in
Figure 4. Because it contains a lot of man-made objects, the SIFT operator can extract enough effective feature points, and the correct rate is higher than 50%, so the RANSAC can be used directly. Using the homography transformation model and the nearest neighbor interpolation method mapping the blue band, the red band, and the near infrared band to the green band, a four-band multispectral image is obtained.
Figure 12 and
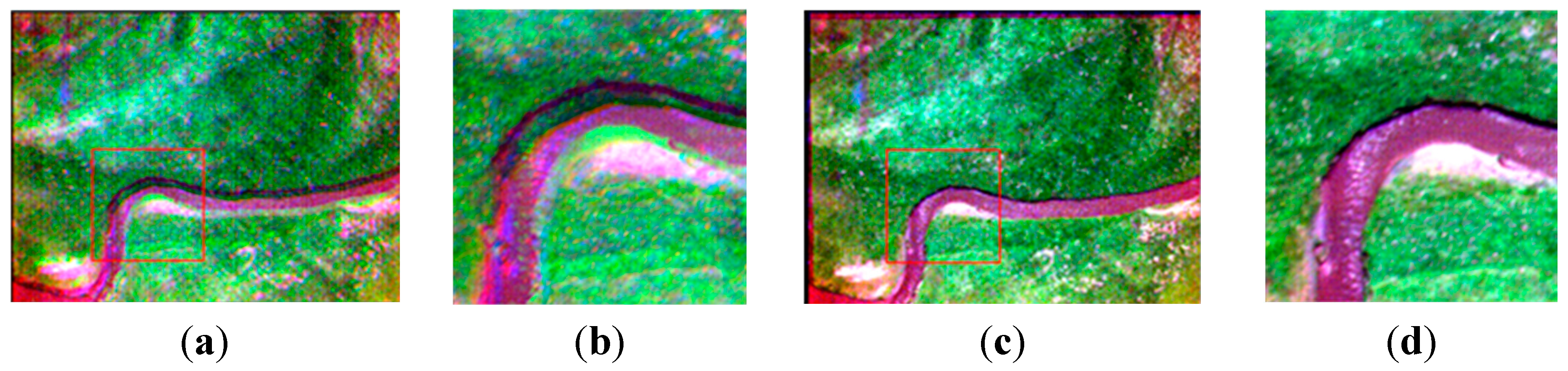
Figure 13 depict the true-color composite and the CIR composite of the four-band image respectively.
Figure 12a and
Figure 13a depict the unregistered multispectral image, and
Figure 12b and
Figure 13b, respectively, display their enlarged partial regions.
Figure 12c and
Figure 13c depict the registered multispectral images, and
Figure 12d and
Figure 13d displays their enlarged partial regions. There are severe dislocations between different bands of the unregistered multispectral image. In contrast, these dislocations disappear in the registered multispectral image.
Figure 12.
The true-color composite (red, green, blue); (a) the unregistered multispectral image; (b) the enlarged partial region of (a); (c) the registered multispectral image; (d) the enlarged partial region of (c).
Figure 12.
The true-color composite (red, green, blue); (a) the unregistered multispectral image; (b) the enlarged partial region of (a); (c) the registered multispectral image; (d) the enlarged partial region of (c).
The difference among the results of the four methods is in subpixel level, unable to be recognized by the naked eye. In order to have a quantitative measure of it objectively, an inverse transformation is performed using the inverse matrix of
Hi, which can transform the coordinates of the input image to the reference coordinates. For any input point (
xi,
yi), its retransformed point (
xr,
yr) in the reference image can be derived from Equation (6) by replacing (
x0,
y0) with (
xr,
yr), shown in Equation (11):
Figure 13.
The CIR composite (infrared, red, green); (a) the unregistered multispectral image; (b) the enlarged partial region of (a); (c) the registered multispectral image; (d) the enlarged partial region of (c).
Figure 13.
The CIR composite (infrared, red, green); (a) the unregistered multispectral image; (b) the enlarged partial region of (a); (c) the registered multispectral image; (d) the enlarged partial region of (c).
The residual,
XR, is the difference between
x0 and
xr, and
YR is the difference between
y0 and
yr. The root mean square error,
R, is the distance between the reference point and the retransformed point in the reference image coordinate system.
XR,
YR and
R, for any match are calculated with distance formulas:
with
n, as the amount of the point pairs,
j, as the serial number,
Rx, the root mean square error in
x direction,
Ry, the root mean square error in
y direction,
Rt, the total root mean square error, can be calculated as the following formulas:
These errors indicate how good the registration is between the input band image and the reference band image. The smaller these errors are, the higher the quality of the four-band multispectral data is.
Table 2 indicates that although all of them have a high accuracy, the methods using homography model have a higher precision than those using the polynomial model.
Table 2.
The errors for registering near infrared, red and green band to the blue band/pixels.
Table 2.
The errors for registering near infrared, red and green band to the blue band/pixels.
| G-B | G-R | G-IR |
|---|
| Rx | Ry | Rt | Rx | Ry | Rt | Rx | Ry | Rt |
|---|
| R1 | 1.17 | 1.12 | 1.62 | 0.98 | 0.84 | 1.3 | 1.7 | 1.14 | 2.05 |
| R2 | 1.03 | 1.21 | 1.59 | 1 | 0.82 | 1.3 | 1.52 | 1.17 | 1.92 |
| R3 | 1.02 | 1.14 | 1.57 | 0.98 | 0.8 | 1.27 | 1.46 | 1.09 | 1.82 |
| R4 | 1.02 | 1.14 | 1.57 | 0.98 | 0.8 | 1.27 | 1.46 | 1.09 | 1.82 |
5.2. Experiment 2
Compared with
Figure 4, nearly all of the ground objects shown in
Figure 6 are the grass except a road. The four methods in the previous section are used to compose one four-band multispectral image.
Figure 14 depicts the true-color composite and CIR composite.
Figure 14a shows the true-color composite of the unregistered multispectral image, and
Figure 14b is its enlarged partial region. An obvious dislocation can be seen in
Figure 14a,b.
Figure 14c shows the registered true-color composite, and
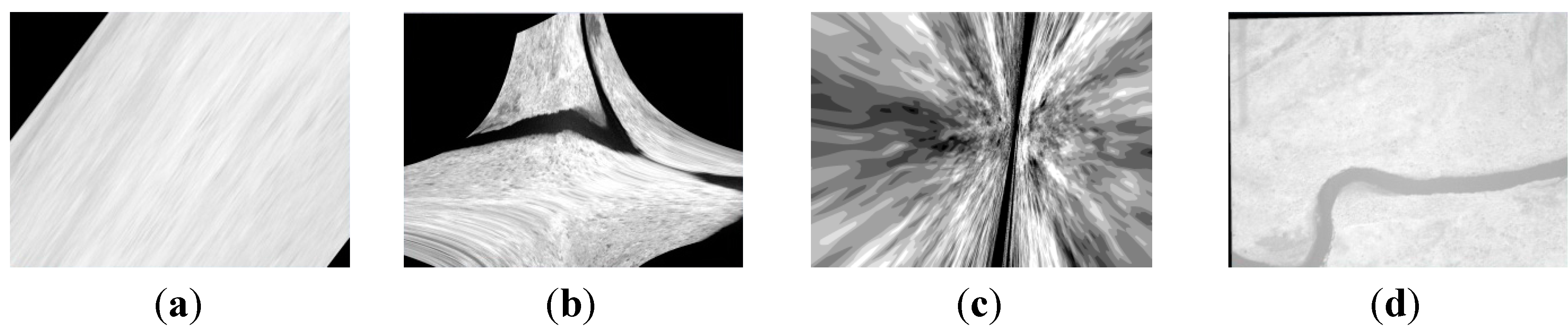
Figure 14d is its enlarged partial region. The dislocation is missing. Because of the lack of artificial objects in these images, there is a great difference between visible SIFT features and infrared SIFT features, and the correct rate of initial matching point pairs is significantly lower than 50%. The first three methods use the RANSAC directly; therefore they cannot get a correct infrared band in the four-band multispectral image, as shown in the first three severely distorted images of
Figure 15. However, the fourth method uses the rejecting false matches method mentioned in
Section 3 to remove most false matches first for promoting the correct rate, and then uses the RANSAC, so it can get a correct infrared band, as shown in the fourth picture of
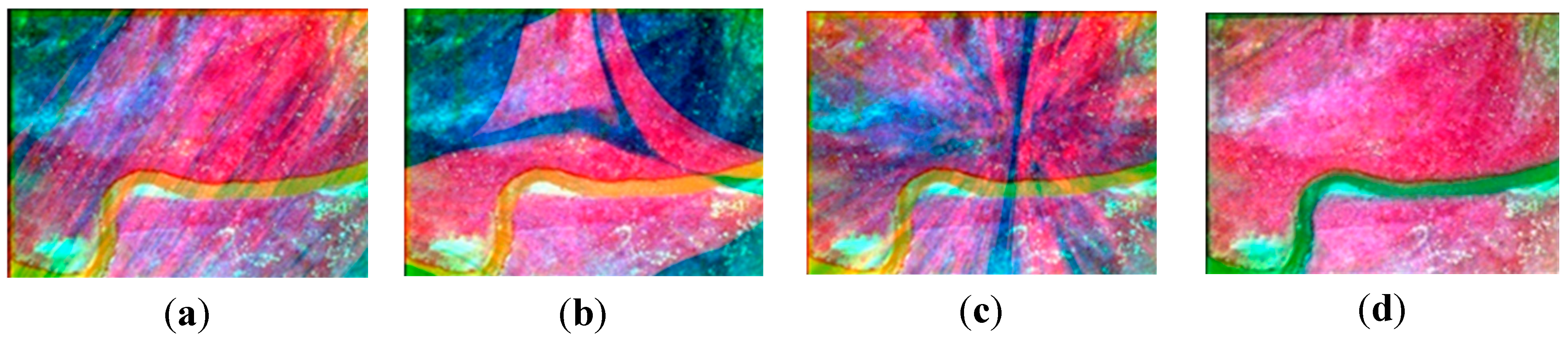
Figure 15. So, the first three methods cannot get a correct CIR composite, as shown in the first three images of
Figure 16, but the fourth can, as shown in the fourth image of
Figure 16.
Table 3, quantitative evaluation of registration error, shows that the errors of the third method and the fourth method are the same, and a little better than the first and second method at column G-B and G-R. At the G-IR column, the first three methods cannot obtain correct results, but the fourth method can get correct result; and its total error, about 2.4 pixels, is still very low.
Figure 14.
The true-color composite (red, green, blue); (a) the unregistered multispectral image; (b) the enlarged partial region of (a); (c) the registered multispectral image; (d) the enlarged partial region of (c).
Figure 14.
The true-color composite (red, green, blue); (a) the unregistered multispectral image; (b) the enlarged partial region of (a); (c) the registered multispectral image; (d) the enlarged partial region of (c).
Figure 15.
The single infrared bands of the multispectral images; (a–c) respectively the infrared bands obtained by using the methods using the first-order polynomial, second-order polynomial and homography mode and using the RANSAC directly; (d) the infrared band obtained by using our method.
Figure 15.
The single infrared bands of the multispectral images; (a–c) respectively the infrared bands obtained by using the methods using the first-order polynomial, second-order polynomial and homography mode and using the RANSAC directly; (d) the infrared band obtained by using our method.
Figure 16.
The CIR composite of the four-band images; (a–c) respectively the multispectral images obtained by using the methods using the first-order polynomial, second-order polynomial and homography model and using the RANSAC directly; (d) the multispectral images obtained by using our method.
Figure 16.
The CIR composite of the four-band images; (a–c) respectively the multispectral images obtained by using the methods using the first-order polynomial, second-order polynomial and homography model and using the RANSAC directly; (d) the multispectral images obtained by using our method.
Table 3.
The errors for registering near infrared, red and green band to the blue band.
Table 3.
The errors for registering near infrared, red and green band to the blue band.
| G-B | G-R | G-IR |
|---|
| Rx | Ry | Rt | Rx | Ry | Rt | Rx | Ry | Rt |
|---|
| R1 | 1.03 | 1.26 | 1.63 | 0.83 | 0.93 | 1.25 | 146 | 309 | 342 |
| R2 | 1.02 | 1.27 | 1.63 | 0.82 | 0.93 | 1.24 | 328 | 377 | 500 |
| R3 | 0.92 | 1.14 | 1.48 | 0.78 | 0.84 | 1.16 | 195 | 249 | 295 |
| R4 | 0.92 | 1.14 | 1.48 | 0.78 | 0.84 | 1.16 | 1.3 | 2.06 | 2.43 |
5.3. Experiment 3
Compared with
Figure 4 and
Figure 6,
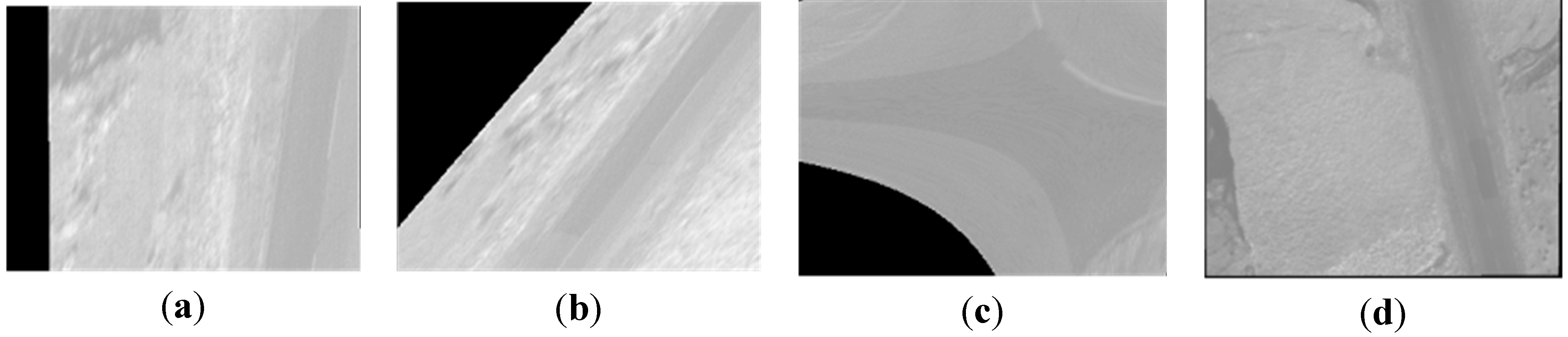
Figure 8 contains no man-made objects. The four methods are used respectively to compose one four-band image.
Figure 17a shows the true-color composite of the unregistered multispectral image, and
Figure 17b is its enlarged partial region. The dislocation is obvious.
Figure 17c,d show the true-color composite of the registered multispectral image. There is no dislocation between different bands. Because there are no artificial objects in these images, there is a great difference between the visible band SIFT features and infrared band SIFT features, and the correct rate of initial matches is lower than 50%, so the first three methods cannot get a correct infrared band in the four-band image, as shown in the first three severely distorted images of
Figure 18. Compared with the other three methods, the fourth method uses the rejecting false matches method mentioned in the
Section 3 to remove most false matches firstly, and then uses the RANSAC; therefore it can get a correct infrared band, as shown in the fourth image of
Figure 18. So, the first three methods cannot get the CIR composite correctly, as shown in the first three images of
Figure 19, but the fourth method can, as shown in the fourth image of
Figure 19.
Table 4 shows that the errors of the third method and the fourth method are the same at the column G-B and G-R, and a little better than the first and second method. At the G-IR column, the first three methods cannot get correct results, but the fourth method can get correct results with a very low error, about 2.5 pixels.
Figure 17.
The true-color composite (red, green, blue); (a) the unregistered multispectral image; (b) the enlarged partial region of (a); (c) the registered multispectral image; (d) the enlarged partial region of (c).
Figure 17.
The true-color composite (red, green, blue); (a) the unregistered multispectral image; (b) the enlarged partial region of (a); (c) the registered multispectral image; (d) the enlarged partial region of (c).
Figure 18.
The single infrared band of the multispectral images; (a–c) respectively the infrared bands obtained by using the methods using the first-order polynomial, second-order polynomial and homography model and using the RANSAC directly; (d) the infrared band obtained by using our method.
Figure 18.
The single infrared band of the multispectral images; (a–c) respectively the infrared bands obtained by using the methods using the first-order polynomial, second-order polynomial and homography model and using the RANSAC directly; (d) the infrared band obtained by using our method.
Figure 19.
The CIR composite of the four-band images; (a–c) respectively the multispectral images obtained by using the methods using the first-order polynomial, second-order polynomial and homography model and using the RANSAC directly; (d) the multispectral images obtained by using our method.
Figure 19.
The CIR composite of the four-band images; (a–c) respectively the multispectral images obtained by using the methods using the first-order polynomial, second-order polynomial and homography model and using the RANSAC directly; (d) the multispectral images obtained by using our method.
Table 4.
The errors for registering near infrared, red and green band to the blue band.
Table 4.
The errors for registering near infrared, red and green band to the blue band.
| G-B | G-R | G-IR |
|---|
| Rx | Ry | Rt | Rx | Ry | Rt | Rx | Ry | Rt |
|---|
| R1 | 1.07 | 1.31 | 1.69 | 0.85 | 0.97 | 1.29 | 227 | 308 | 383 |
| R2 | 1.05 | 1.28 | 1.66 | 0.84 | 0.93 | 1.25 | 125 | 249 | 279 |
| R3 | 0.95 | 1.12 | 1.47 | 0.83 | 0.92 | 1.24 | 194 | 237 | 306 |
| R4 | 0.95 | 1.12 | 1.47 | 0.83 | 0.92 | 1.24 | 1.4 | 2.08 | 2.5 |










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











