1. Introduction
A voltage sensor is an important part of the electric system and the accuracy and rapidity of sensor measurement decides the instantaneity of on-line monitoring of the smart power grid [
1]. Potential sensors (PTs) and capacitive voltage sensors (CVTs) are often applied to the current electric system [
2,
3,
4,
5,
6]. A PT involves a large volume, complex insulation structure, and high design cost. In order to increase the accuracy of sensor detection, an iron core structure is adopted during design. Ferromagnetic resonance can occur easily during practical application, and the sensor cannot reflect the changes of measured voltage in time [
7,
8,
9,
10,
11]. As for CVTs, the measurement signal at the secondary side of a CVT is gained by way of step-by-step voltage reduction for the voltage at the high-voltage side. The measurement signal obtained with this method possesses a great lag when compared with the signal at the high-voltage side. Moreover, a CVT involves a large voltage as well as complex installation and application [
12,
13,
14]. Therefore, traditional voltage sensors are unsuitable for an intelligent development of the power grid. Meanwhile, a direct electric connection is required with the high-voltage conductor when a traditional voltage sensor is used. Thereby, the application range of voltage sensors is restricted [
15].
To address the above problems, a new voltage sensor is designed. Different from traditional voltage sensors, this sensor adopts a unipolar structure design which solves the problems of traditional voltage sensors like great insulation design difficulty and high costs caused by the grounding electrode. A differential signal input structure is adopted for the detection circuit, which effectively restrains the influence of common-mode interference signals [
16,
17,
18]. Through sensor modeling, simulation and calculations, the structural design of the sensor electrode is optimized, miniaturization of the sensor is realized, the voltage division ratio of sensor is enhanced, and the sensor measurement phase difference is weakened.
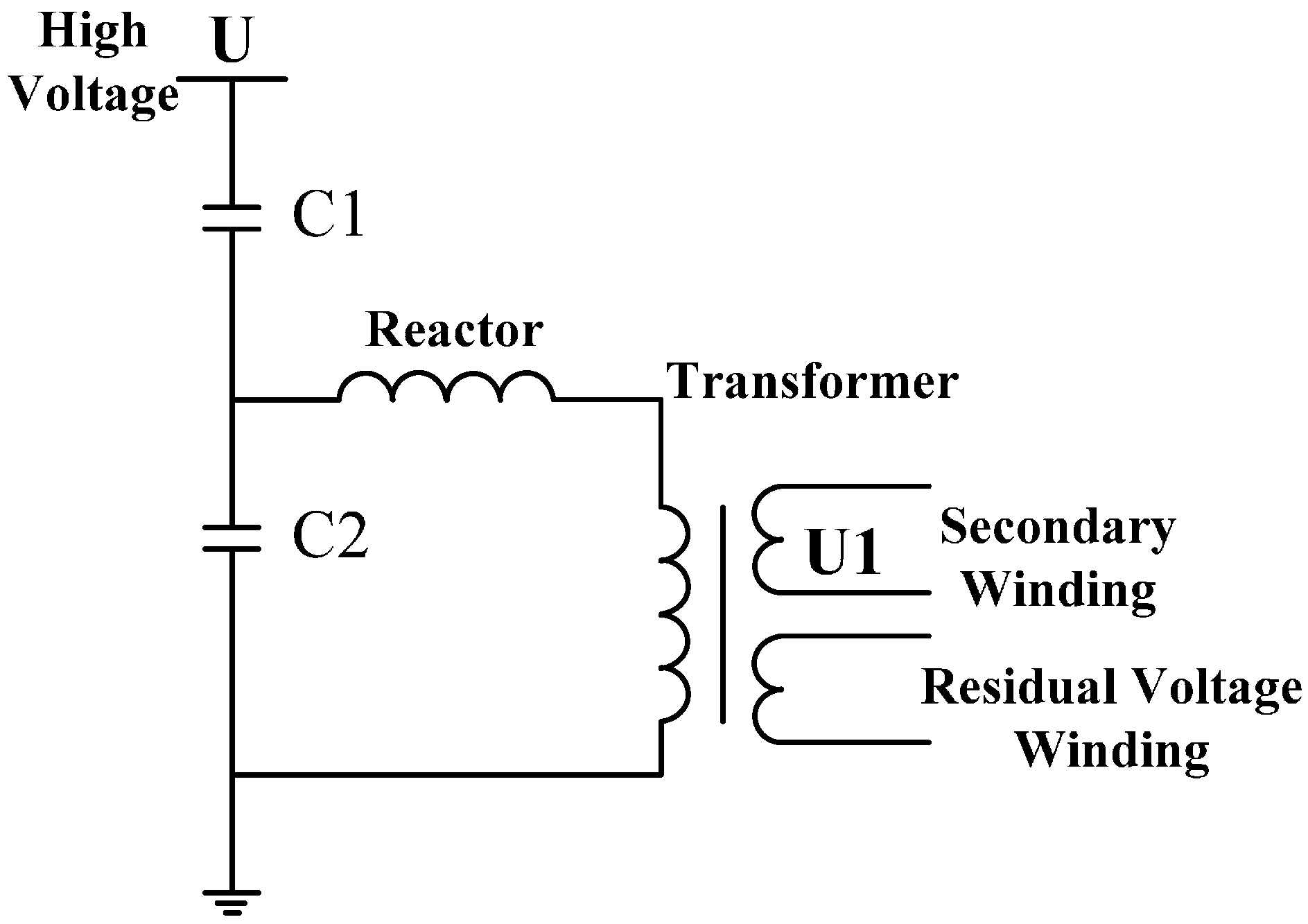
A typical capacitor voltage sensor (CVT) is presented in
Figure 1. Its working principle is to divide the voltage U of the conductor to be measured with a voltage division capacitor and to obtain the detection signal U1 at the secondary winding through the sensor.
Figure 1.
Typical capacitor voltage sensor.
Figure 1.
Typical capacitor voltage sensor.
In other words, a CVT directly measures the voltage of the conductor to be measured using the following equation:
Meanwhile, the following requirements should be met when a CVT is used:
- (1)
One end of the CVT should be connected to the ground;
- (2)
The CVT must have a direct electrical connection with the high-voltage terminal.
The sensor designed in this paper has essential differences with the CVT, and these differences can be summarized as follows:
- (1)
By adopting capacitor voltage division principle, CVT conducts direct measurement for the conductor voltage. However, sensor designed by this paper measuring the electric field intensity around the charged conductor. Suppose that the voltage value of conductor is
φ(t), electric field intensity generated by it is
E(t), and time-dependent inductive charge
Q will be generated at the induction electrode of instrument sensor owing to electric field coupling principle. Through formula derivation, the following relation is gained:
According to Equations (2) and (3), the voltage of the charged conductor can be measured indirectly by measuring the electric field intensity around the conductor to be measured. This is different from the CVT voltage measurement method.
- (2)
Differing from a CVT in voltage measurement, the instrument sensor designed in this paper does not have electrical connections with the high-voltage side when in use.
The voltage sensor is applied to a single-phase voltage class line of 10 kV for testing. According to the test results, the designed sensor is able to meet the requirements of accurate and real-time voltage measurement as well provide a new method for electricity larceny prevention and on-line monitoring of the power grid in smart power grids, therefore, it can satisfy the development demands of smart power grids.
2. Design Principle of the Voltage Sensor
The voltage sensor introduced in this paper is designed on the basis of the electric field coupling principle. Its essence is the principle that electric charges are distributed on the conductor and the electric potential of the conductor involves the relation between conductor and ground, so the electric potential of the conductor also presents a linear relation with electric field intensity around the conductor. By introducing a sensor into the periphery of conductor to be measured, a signal directly proportional to the differential of the electric potential of conductor to be measured over time is obtained, and this signal is integrated, so as to obtain the electric potential value of the conductor. The difference between this result and earth potential is the voltage value of conductor to be measured.
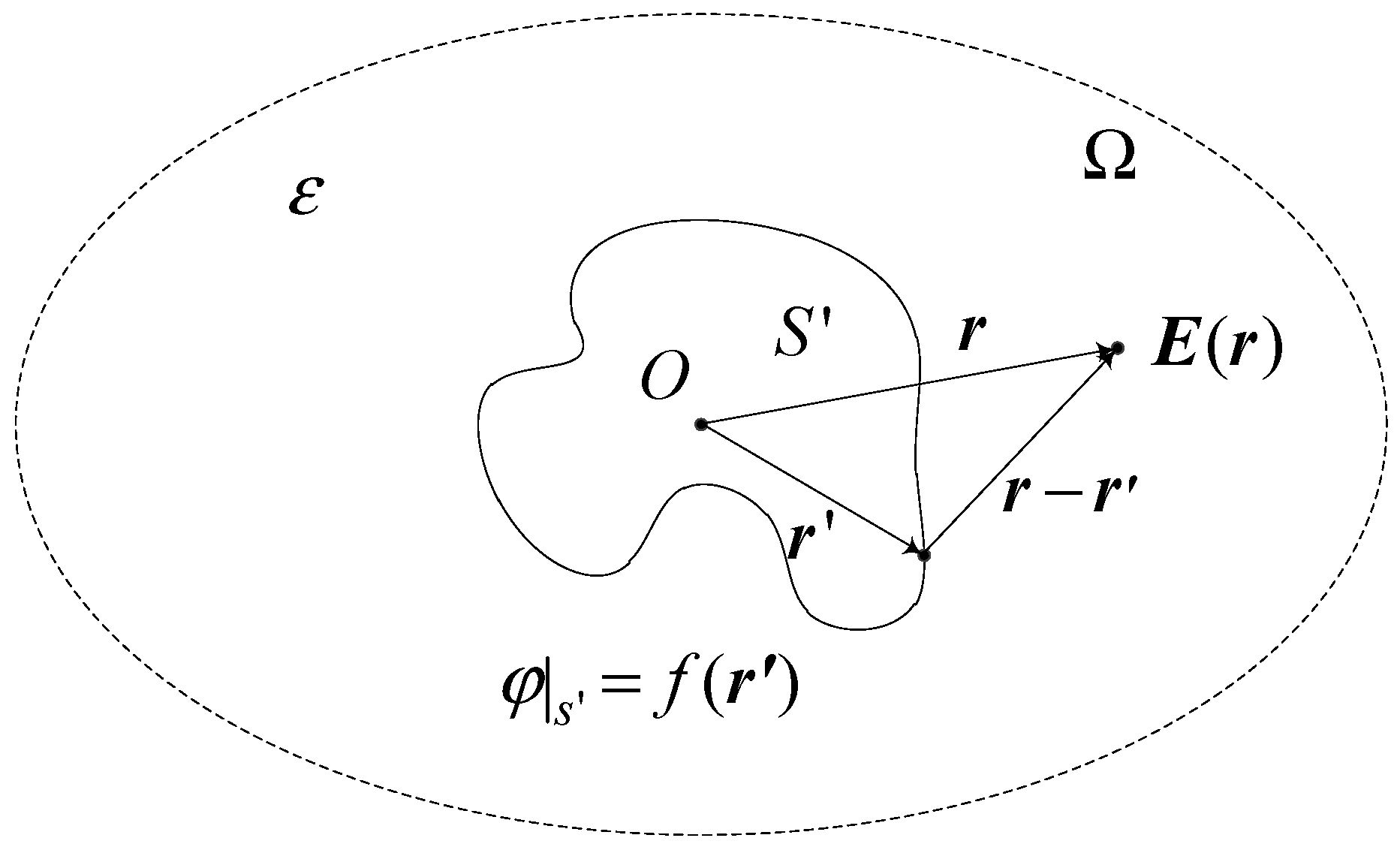
As shown in
Figure 2,
S is the outer surface boundary of charged conductor of any shape; Ω indicates the calculation region;
ε represents the electric medium constant in the region; Ω meets asymptotic boundary conditions [
19].
Figure 2.
Calculation for the electric field distribution of a charged body.
Figure 2.
Calculation for the electric field distribution of a charged body.
The potential distribution on the outer surface of charged conductor is
f(
r');
r' is the position vector at the original point,
r represents the position vector at the calculation site;
E(
r) indicates the electric field intensity. There is no free charge in the calculation region, which means
ρ(
r') = 0. In other words, the electric potential in the calculation region fulfills the Poisson equation:
By introducing the Green function, Equation (4) is obtained according to
ρ(
r') = 0 and the first kind of boundary condition,
φ/s' =
f(
r') [
20]:
In the equation, F(r) is determined by the position of charged body at the site. According to Equation (5), for any point in the calculation region, the electric field intensity is always in direct proportion to the electric potential of the conductor. Moreover, they present a linear relation.
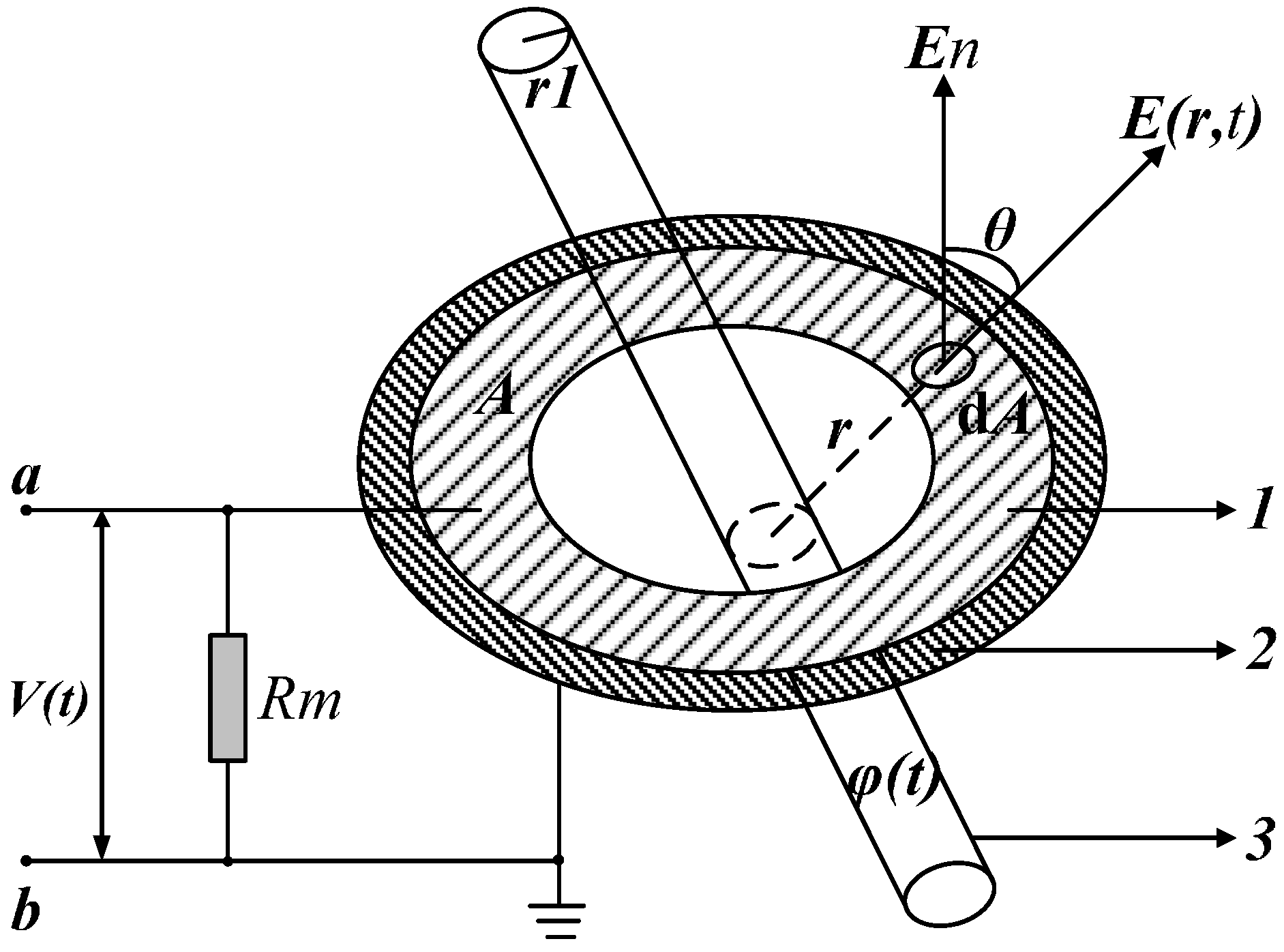
Figure 3.
Measurement principle of electric field coupling sensor.
Figure 3.
Measurement principle of electric field coupling sensor.
Figure 3 shows the measurement principle of the voltage sensor based on the electric field coupling principle. Label 1 is a metal electrode of any shape and its outer surface is A. Label 2 represents the insulator; as the support of metal electrode, it is connected to the ground. Label 3 indicates the energized cylindrical conductor; its bottom radius is
r1 and its electric potential is
φ(
t). The metal electrode is connected to the sampling resistance Rm through a coaxial cable and the other side of the resistance is connected to the ground.
The electric field generated by the conductor charge in the surrounding space is
E(
r,
t). Under the effect of the electric field, an inductive charge will appear on the surface of the metal electrode owing to electrostatic induction principle [
20,
21]. Suppose that the quantity of electric charge is
q. A closed Gaussian surface is created on the surface of the metal electrode and the infinitesimal
dA is taken. Its angular separation with the electric field
E(
r,
t) in the normal direction is
θ. The following equation can be obtained from the Gauss theorem:
According to Equation (6), the electric field intensity changes with time, and the inductive charge varies accordingly. At this time, voltage drop in resistance
Rm is:
Therefore, the voltage of the charged conductor is:
According to Equation (8), by integrating the output signal V(t) of sensor, the voltage in the conductor can be obtained.
3. Sensor Structure Design
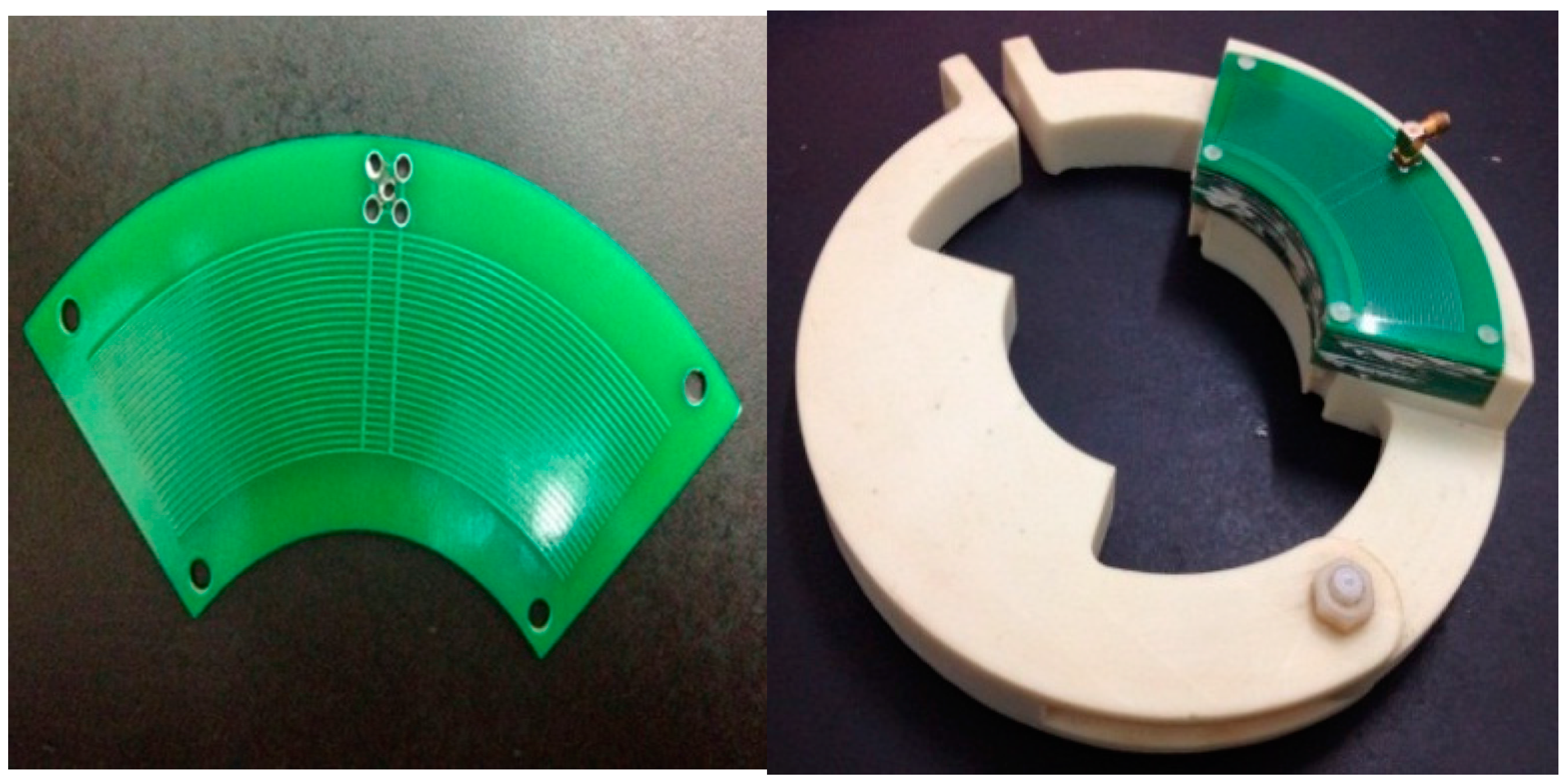
3.1. Structure of the Sensor
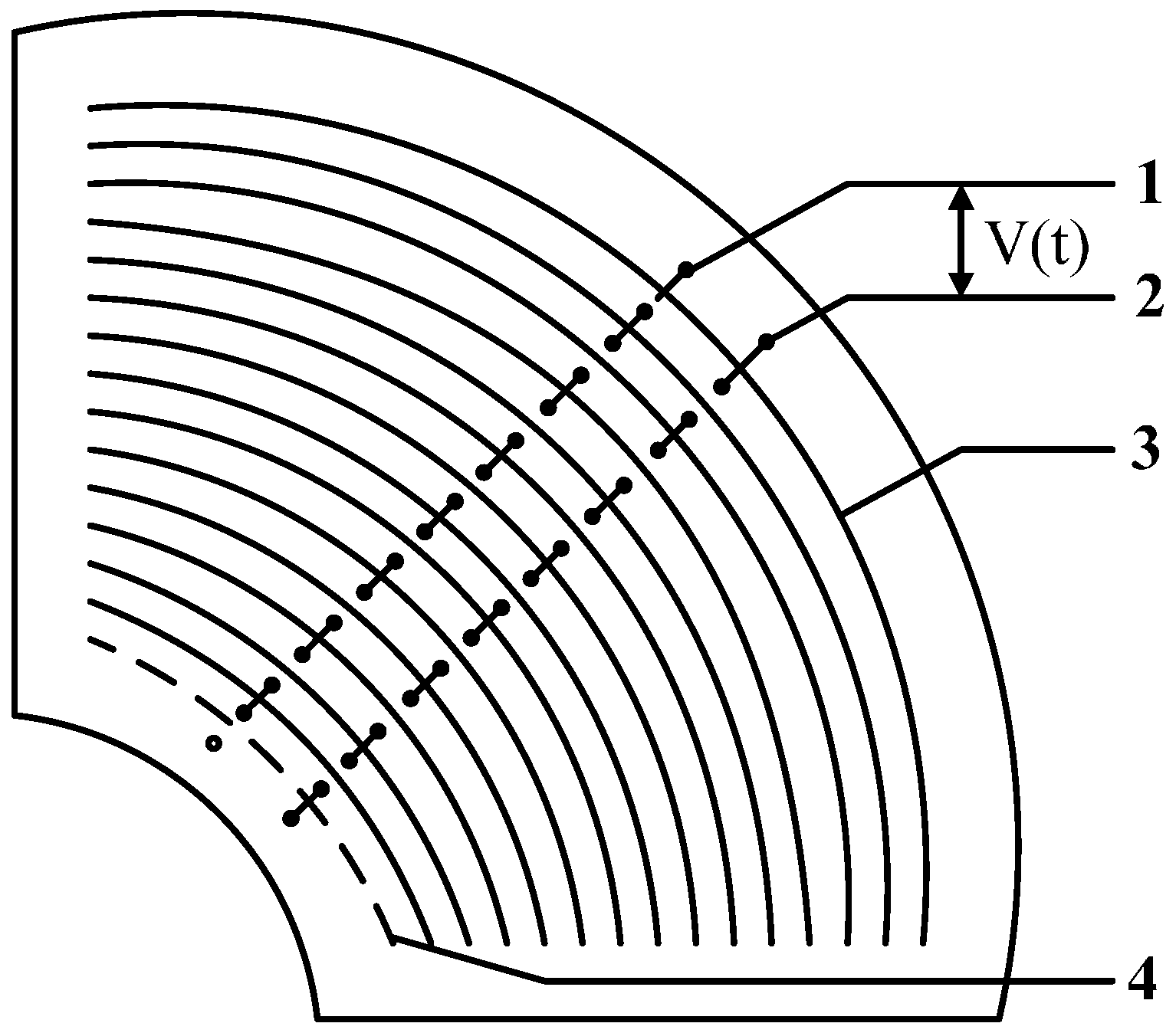
Figure 4 shows the structure of the voltage sensor based on the electric field coupling principle. Annular metal electrodes are etched on both sides of a printed-circuit board (PCB) as induced electrodes. Electrodes of even number on the positive side of the PCB and electrodes of odd number on the reverse side are connected via the hole to form Electrode 1 of the sensor detection electrode. Electrodes of odd number on the positive side of the PCB and electrodes of even number on the reverse side are connected via the hole to form Electrode 2 of the sensor detection electrode. Electrodes connected together have the same electric potential. The sensor can be composed of several PCBs joined together. Electrode 1 of the annular electrodes on each PCB will be connected together, and similarly Electrode 2 on each PCB will be connected together.
A unipolar design is adopted for the sensor. In other words, the induced electrode of the sensor is earth-free and the potential difference V(t) between the annular electrodes is used as the signal output of the sensor. A differential amplifier is introduced through a coaxial cable to obtain the difference between two input signals and perform amplification. Such a design solves the problems of insulation design difficulty caused by the grounding electrode of the sensor. Meanwhile, it greatly reduces the insulation design cost and difficulty.
Figure 4.
Structure of voltage sensor. 1. Electrode 1; 2. Electrode 2; 3. Annular electrode on the positive side; 4. Annular electrode on the reverse side.
Figure 4.
Structure of voltage sensor. 1. Electrode 1; 2. Electrode 2; 3. Annular electrode on the positive side; 4. Annular electrode on the reverse side.
3.2. Amplitude-Frequency Characteristics of the Electric Field Coupling Sensor
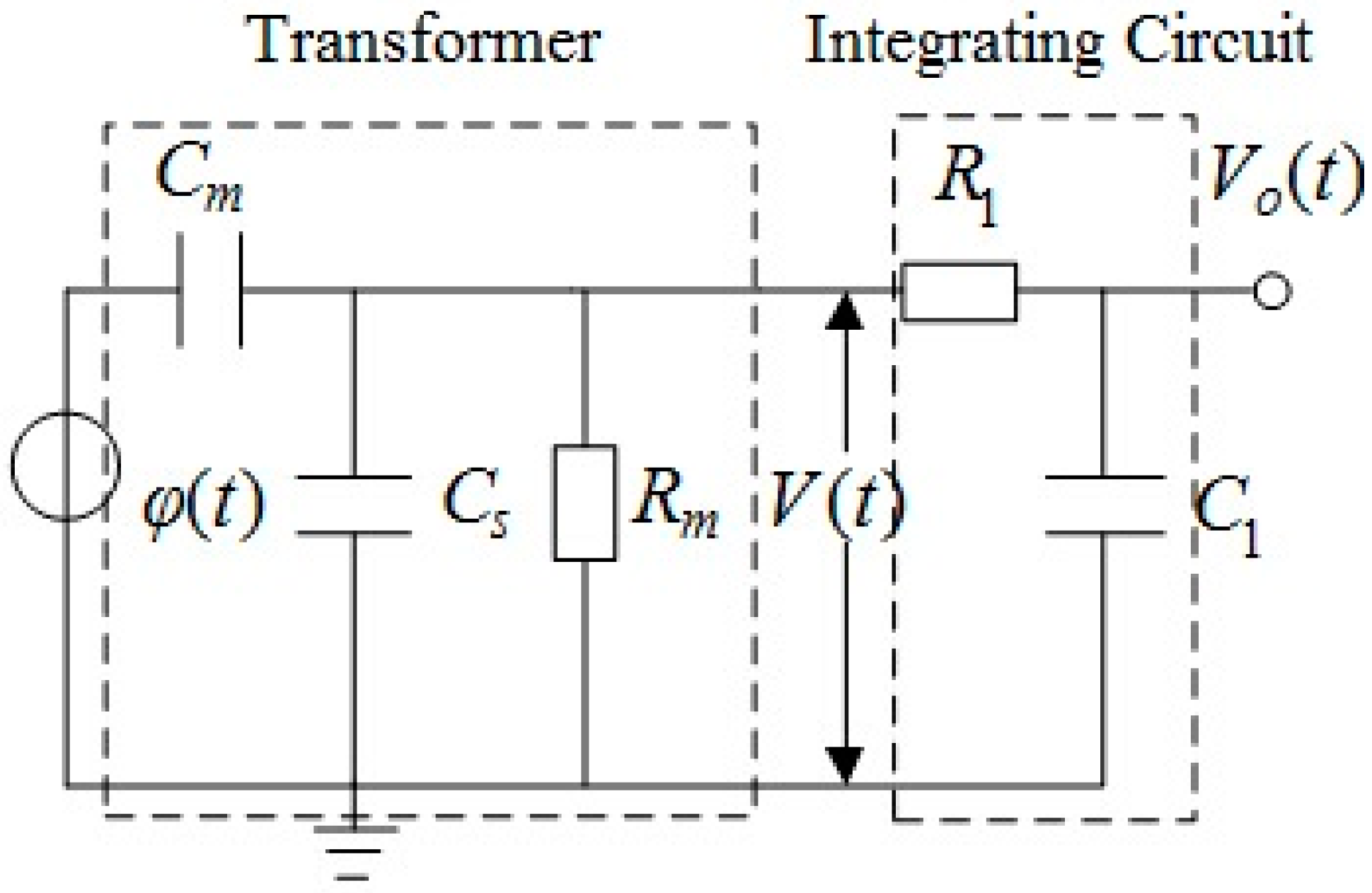
The measurement signal output by the instrument sensor is a microcomponent directly proportional to the intensity value of the electric field to be measured. When the influence of frequency change is considered, an equivalent distributed capacitance exists among nearby and insulated conductors due to the difference of electric potential. Therefore, the lumped parameter equivalent circuit model of the entire measurement system presented in
Figure 5 can be used.
Figure 5.
Equivalent circuit of the probe and passive integrator.
Figure 5.
Equivalent circuit of the probe and passive integrator.
The voltage of the conductor to be measured is equivalent to the voltage source whose potential to ground is φ(t). Cm is the equivalent distributed mutual capacitance between the sensor electrode and the conductor to be measured, Cs refers to the equivalent distributed stray capacitance to ground of the sensor electrode, and Rm means the grounding load resistance. The sensor is equivalent to a first-order RC circuit composed of Cm, Cs and Rm. The sensor outputs V(t) to a passive integral circuit composed of resistor R1 and capacitor C1, and the output signal Vo(t) of the integral circuit is the obtained measurement signal.
The transfer function of sensor can be obtained through a Laplace transformation:
The transfer function of passive integral circuit is:
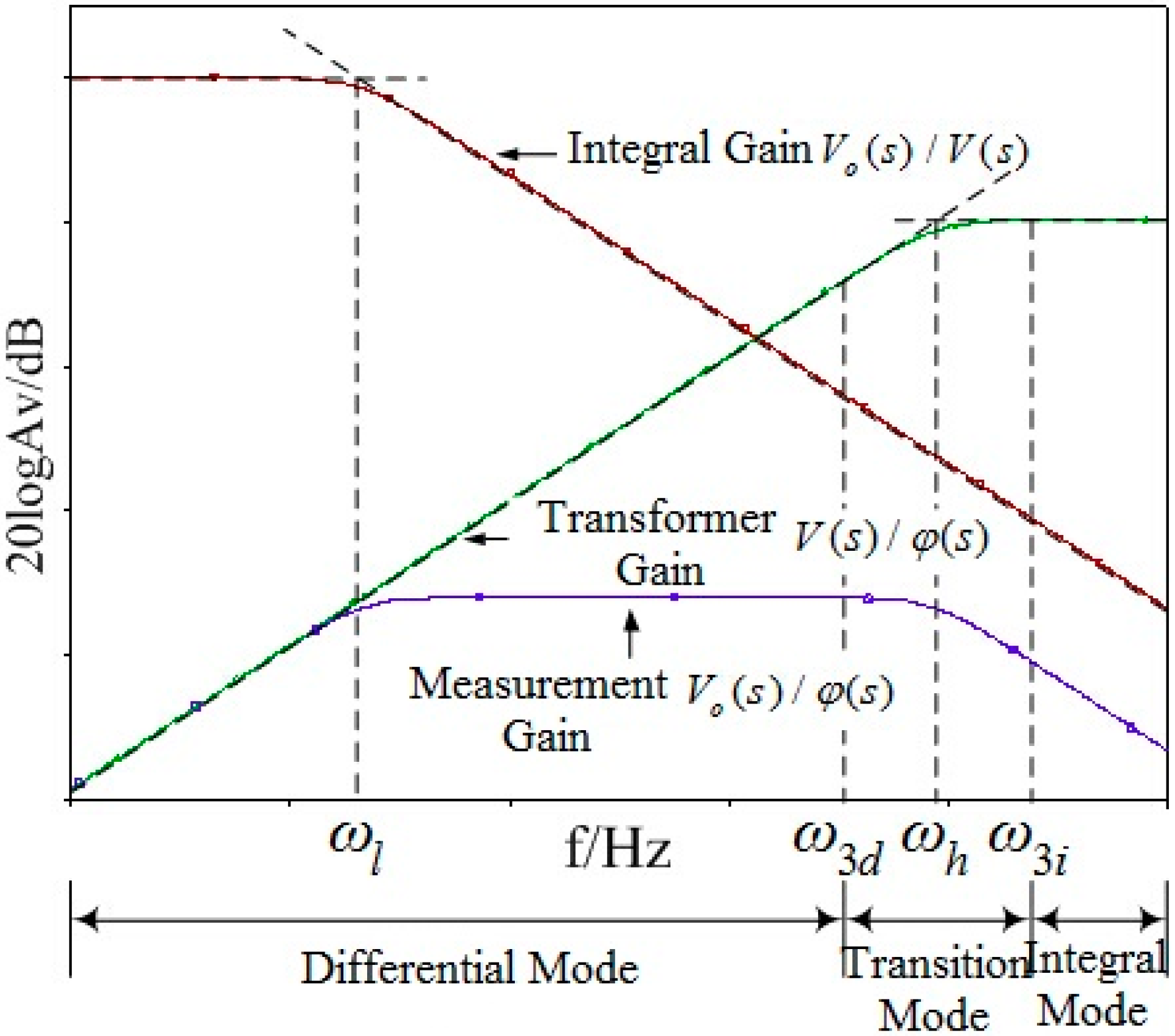
The characteristic amplitude-frequency response curve of the sensor, integral circuit and the entire measurement system can be obtained through Equations (9) and (10), as shown in
Figure 6:
Figure 6.
Frequency response of the equivalent circuit.
Figure 6.
Frequency response of the equivalent circuit.
In
Figure 6,
ωl and
ωh are the corner frequencies of the amplitude-frequency characteristic curves of the passive integral circuit and electric field coupling sensor, and meanwhile they are also the lower frequency limit and upper frequency limit of the entire measurement system. They will decide the measurement bandwidth of the measurement system.
ω3d and
ω3i are the frequency points of decreasing and increasing the sensor gain by 3 dB from the corner frequency
ωh of the sensor:
When (
Cm +
Cs)
Rm>>1 (the lower frequency limit of the measured voltage
ωa>
ω3i), the transfer function of the sensor can be obtained according to Equation (12):
In such a situation, V(s) and φ(s) are directly proportional, and the sensor operates in self-integral mode. The sensor is able to make its input and output present a linear relation without an integral circuit. Generally speaking, the voltage frequency in the electrical power system is within the fundamental frequency range of 50 Hz, but the transient voltage frequency might reach a level of MHz. The sensor needs to maintain a stable gain in such a wide frequency range and increase the frequency range as much as possible, so a sensor operating in self-integral mode has more advantages when applied to voltage measurement of electrical power systems by considering a series of problems in the integral circuit. When designing the sensor in this paper, a sensor operating in self-integral mode will be used, so as to make it suitable for application in electrical power systems.
3.3. Differential Input Structure
In order to make electric field coupling voltage sensor operate in self-integral mode under the power frequency of 50 Hz, and realize the purposes of expanding bandwidth, reducing error and avoiding the influence of the integral circuit, the corner frequency
ωh should at least meet the following conditions:
Therefore, the value of (
Cm +
Cs)
Rm should at least meet the following conditions:
Only in this way, can the electric field coupling sensor operate in self-integral mode. In view of the insulating strength and geometrical parameters and structures of the conductor, the distance between the electric field coupling sensor and the measured conductor should not be too close, and the capacitance value of the mutual capacitor Cm between the measured conductor and sensor electrode and the capacitance value of the stray capacitor to the ground Cs of the electrode are of pF (10−12) magnitude. In order to meet the conditions in Equation (15), a load resistor Rm with a resistance value of GΩ grade should be used. Thus problems exist in resistor selection and impedance matching. If the resistance value is too small, the corner frequency of the transfer function will move toward a high-frequency region, which can reduce the measurement bandwidth.
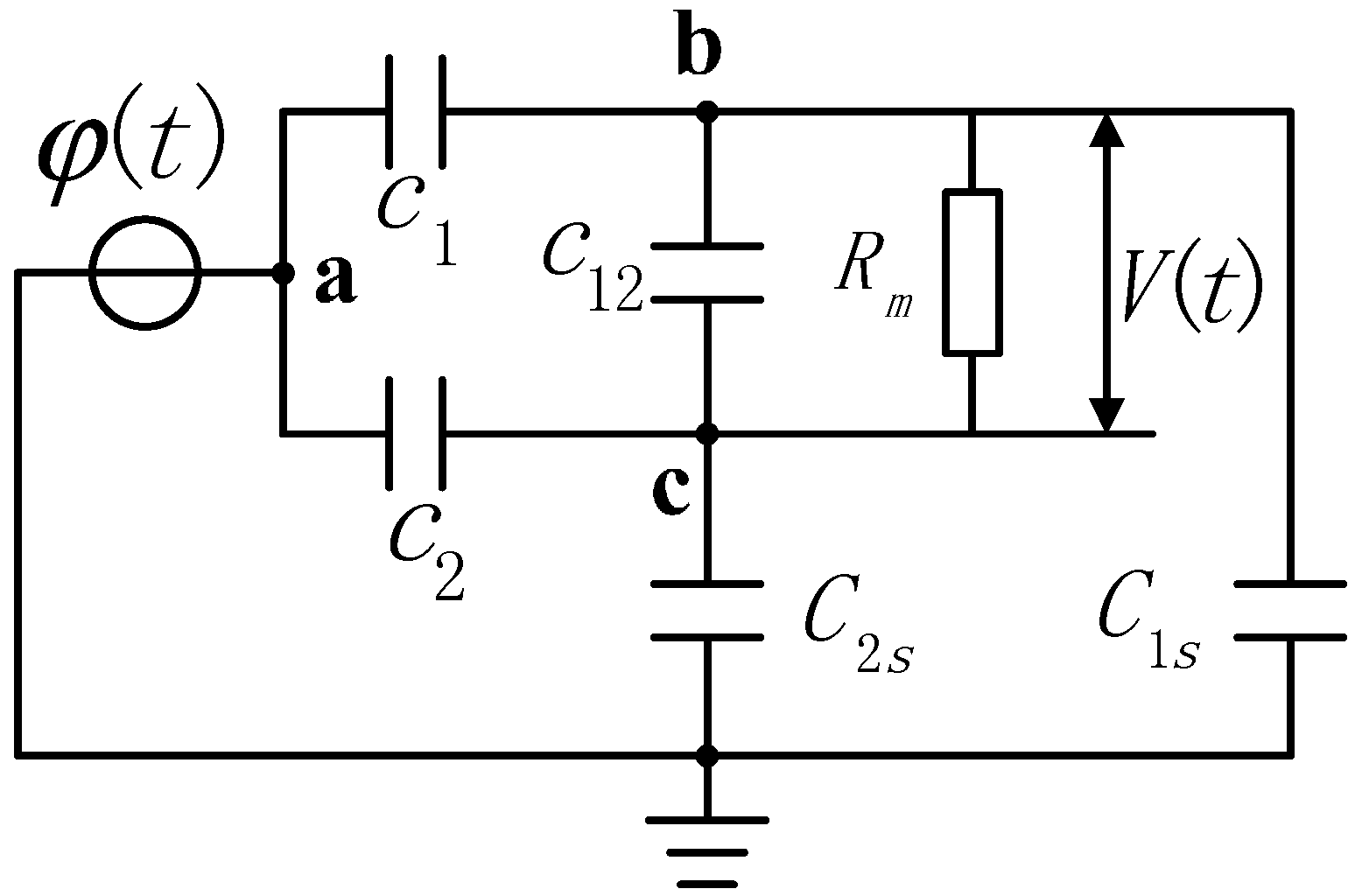
In order to solve the above problems, an electric field coupling sensor of differential input structure is proposed in this paper.
Figure 7 shows the equivalent circuit of the voltage sensor. In this figure a is the electric potential of the conductor to be measured, and mode b and c are floating electrode potentials. The potential difference
V(
t) is the input signal of the differential amplifier,
C1 refers to the equivalent distributed capacitance of the conductor to be measured and Electrode 1,
C2 indicates the distributed capacitance of the conductor to be measured and Electrode 2,
C12 denotes the mutual capacitance between two electrodes,
C1s means stray capacitance to earth of Electrode 1,
C2s represents stray capacitance to earth of Electrode 2, and
Rm is the input impedance of the differential amplifier.
According to the circuit structure in
Figure 7, the transfer function of the voltage sensor is obtained:
According to Equation (16), the distance between electrodes can be adjusted freely. Compared with the situation where the mutual capacitance
C1 and
C2 between the conductor to be measured and electrodes cannot acquire a great capacitance value due to the long distance, the mutual capacitance
C12 between electrodes is able to reach a capacitance value far greater than the mutual capacitance between conductor and electrodes as well as the stray capacitance to earth of the electrodes. The increase of the
C12 value will enhance the measurement bandwidth of the sensor, reduce the measurement phase error, and make the sensor work in a self-integral state under low frequency. Therefore, the parallel connection of multiple electrodes shown in
Figure 4 is adopted, and multiple sensors are used in superposition. In this way, the value of the mutual capacitance
C12 between electrodes is increased to the largest extent.
Figure 8 shows the actual sensor.
Figure 7.
Equivalent circuit of the voltage sensor.
Figure 7.
Equivalent circuit of the voltage sensor.
Figure 8.
Real sensor appearance.
Figure 8.
Real sensor appearance.
5. Simulations
In experiments, the above voltage sensor was put in an insulating sleeve. Therefore, modeling and simulation were conducted for the insulating sleeve of the sensor, conductor and voltage sensor in the electromagnetic field finite element software Ansoft Maxwell environment. The degree of distortion of the electric field to be measured after introducing sensor was analyzed by comparison. Meanwhile, simulation calculations were carried out to verify whether the structural design of the sensor meets the insulation design requirements and the relationship between structural design of the sensor and inter-electrode capacitance.
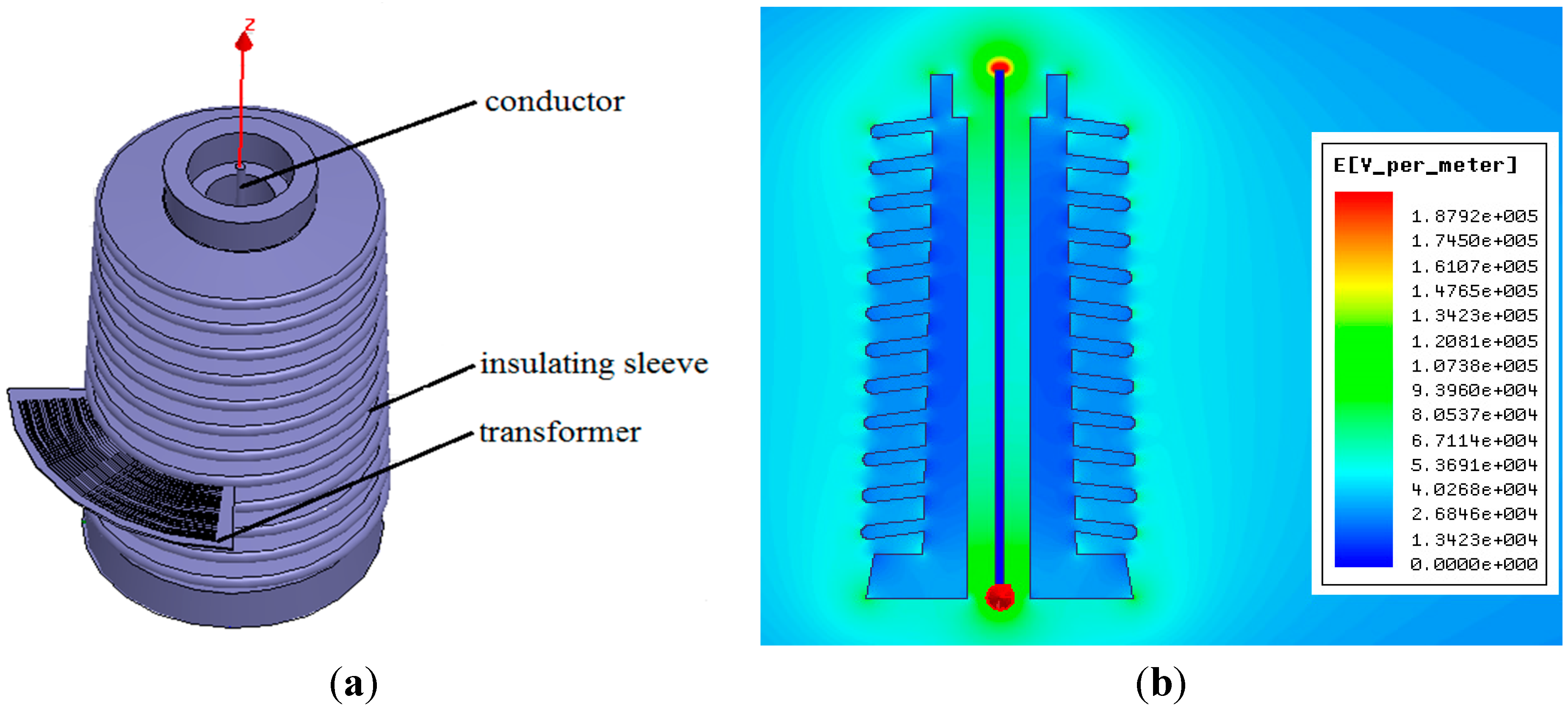
Figure 9 is the simulation model, in which 1 is the conducting rod in the insulating sleeve of the sensor, 2 represents the insulating sleeve, and 3 refers to the voltage sensor. During the simulation, it was thought that the electric field around the insulating sleeve was only generated by the electric charge on the conducting rod in the insulating sleeve, without interference from any external electric field. In practical experiments, other charged bodies were kept away from the electric field to be measured, so as to ensure an experimental environment with little interference [
22].
Figure 9.
Simulation model. (a) Calculation model; (b) Electric field intensity distribution (cross-section).
Figure 9.
Simulation model. (a) Calculation model; (b) Electric field intensity distribution (cross-section).
5.1. Distortion of the Electric Field to be Measured Caused by the Voltage Sensor
During simulation, the conductor voltage in the insulating sleeve is set as 10 kV. After the simulation,
Figure 10a shows the electric field distribution inside and outside the insulating sleeve before introducing the voltage sensor. From the simulation, we can see that in the insulating sleeve, near the end of the conductor, the electric field strength is about 250 kV/m, and the electric field intensity close to the internal side and external side of the insulating sleeve is about 65 kV/m. The greater the distance to the insulating sleeve is, the lower the electric field intensity will be.
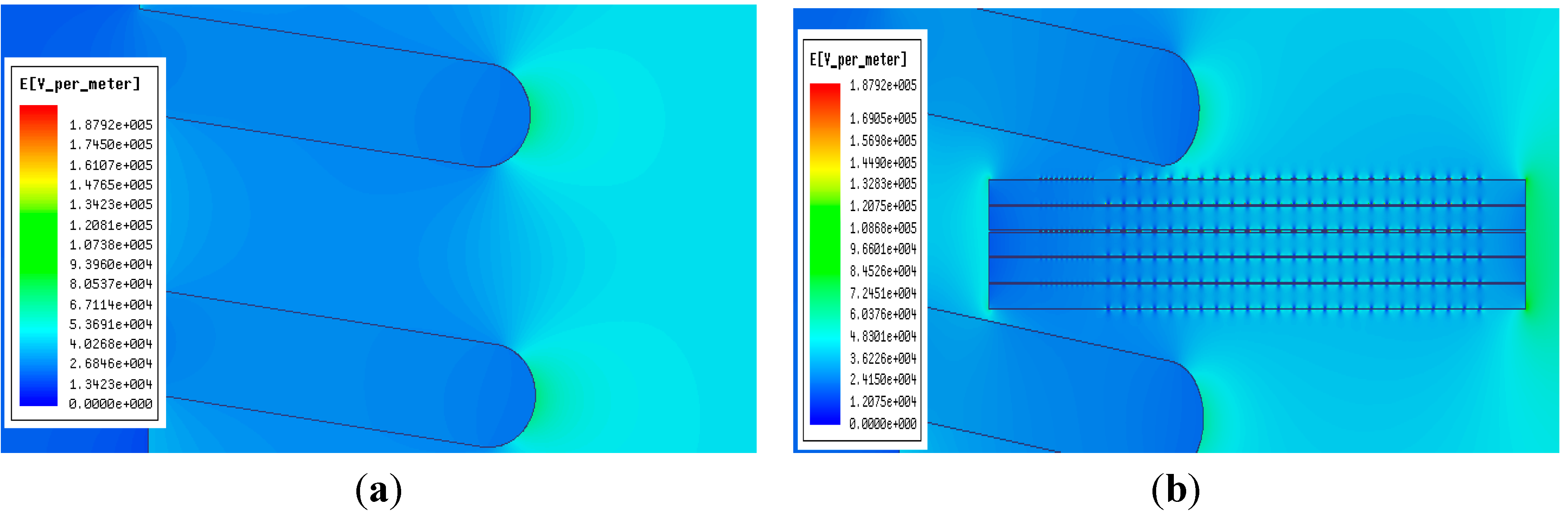
Figure 10b presents the influence on the electric field to be measured after introducing voltage sensor. According to the figure, the electric field intensity in the place of the sensor is weakened, while the electric field intensity at the edge of sensor is increased. The electric field intensity distribution around the sensor is even. According to the analysis, introduction of the sensor has resulted in a distortion of the electric field to be measured, but the electric field intensity just declines from 65 kV/m before introducing the sensor to about 48 kV/m. Such a distortion effect will not bring about a huge interference in the measurements of the voltage sensor.
Figure 10.
Influence of the voltage sensor on the electric field to be measured. (a) Electric field distribution before introducing the voltage sensor; (b) Electric field distribution after introducing the voltage sensor.
Figure 10.
Influence of the voltage sensor on the electric field to be measured. (a) Electric field distribution before introducing the voltage sensor; (b) Electric field distribution after introducing the voltage sensor.
Table 1.
Calculated value of electric field intensity for different voltage values.
Table 1.
Calculated value of electric field intensity for different voltage values.
| Voltage (kV) | Value of Electric Field Before Using the Sensor (V/m) | Value of Electric Field After Using the Sensor (V/m) |
|---|
| 1 | 4904.36 | 4127.17 |
| 2 | 9808.00 | 8254.36 |
| 3 | 14,712.61 | 12,379.87 |
| 4 | 19,768.98 | 16,507.49 |
| 5 | 24,520.10 | 20,633.19 |
| 6 | 29,423.23 | 24,760.02 |
| 7 | 34,329.97 | 28,886.87 |
| 8 | 39,232.58 | 33,014.99 |
| 9 | 44,136.06 | 37,139.03 |
| 10 | 49,040.67 | 41,266.37 |
During the simulation, a point is set up on the upward side of the voltage sensor. The electric field intensity change of this point before and after introducing the voltage sensor is calculated.
Table 1 shows the electric field intensity values of this point for different voltage values.
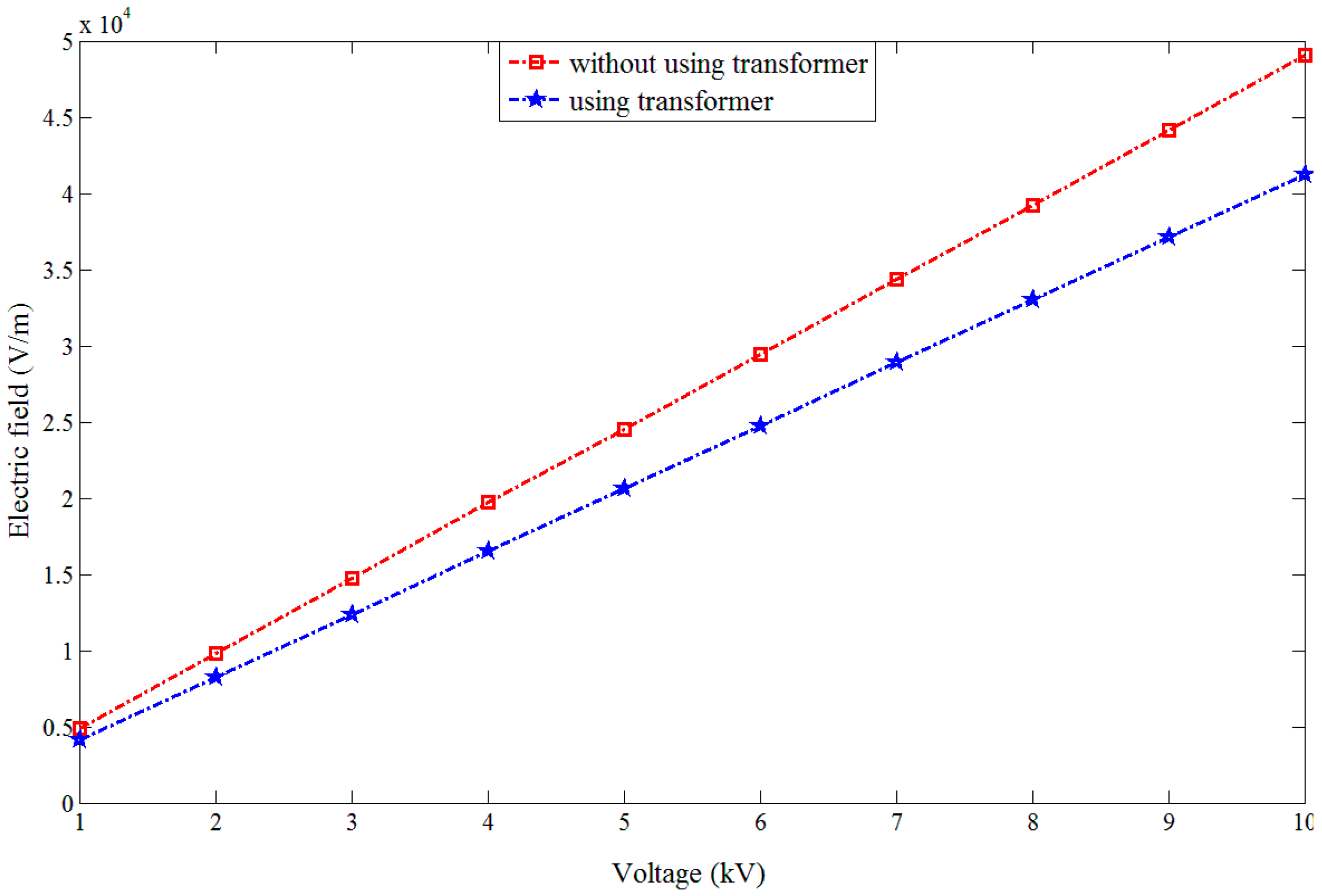
Figure 11 presents the curve relating the electric field intensity change and voltage value. According to the figure, before introducing the voltage sensor, the electric field intensity of this point presents a linear increasing trend with the voltage increase; after introducing the voltage sensor, a distortion effect is caused to the original electric field and the electric field intensity of the test point is reduced, but it still presents a linear increasing trend as the voltage increases. Therefore, after introducing the voltage sensor designed in this paper, the electric field intensity near the sensor still maintains the relationship whereby the electric field intensity presents a linear variation with voltage change. Moreover, the sensor output signal also shows a linear relation with electric field intensity. Thus the correctness of voltage sensor design principle is verified.
Figure 11.
Change of electric field intensity with voltage value.
Figure 11.
Change of electric field intensity with voltage value.
5.2. Relationship between the Structural Design of the Sensor and the Inter-Electrode Capacitance
Through follow-up processing of the simulation results, the equivalent distributed capacitance values under different incentive structures and electrode structures can be obtained. Thus the sensor structure design can be optimized.
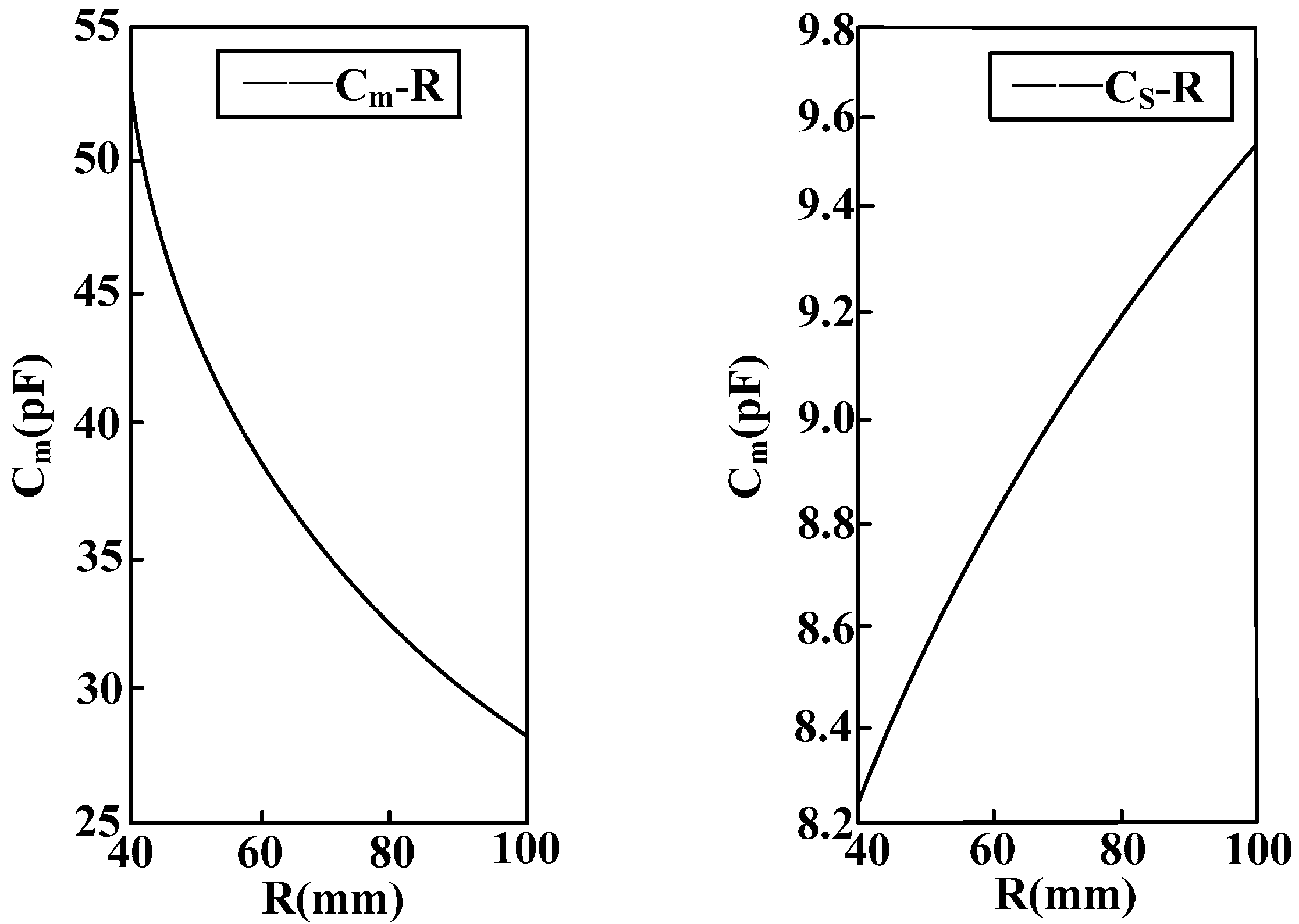
Figure 12 shows the relation between sensor radius R and equivalent capacitance
Cm between electrodes as well as stray capacitance to earth
Cs of the electrodes. When the sensor electrode radius R increases, the equivalent capacitance
Cm between electrodes is reduced and the stray capacitance to earth
Cs of the electrodes increases. Moreover, the amount of change of the equivalent capacitance between electrodes is far greater than the amount of change of the stray capacitance to earth of the electrodes.
Figure 13 shows the relation between sensor electrode width D and equivalent capacitance
Cm between electrodes as well as stray capacitance to earth
Cs of the electrodes. When the sensor electrode width increases, the equivalent capacitance
Cm between electrodes remains unchanged and stray capacitance to earth
Cs of electrodes increases with the increase of electrode width.
Figure 14 shows the relation between number N of parallel-connection electrodes of the sensor and equivalent capacitance
Cm between electrodes as well as stray capacitance to earth
Cs of the electrodes. When the number of parallel-connection electrodes of the sensor rises, the equivalent capacitance
Cm between electrodes remains unchanged and stray capacitance to earth
Cs of electrodes increases with the increasing number of electrodes.
Figure 12.
Curve of the relation between equivalent capacitance parameters and electrode radius.
Figure 12.
Curve of the relation between equivalent capacitance parameters and electrode radius.
Figure 13.
Curve of the relation between equivalent capacitance and electrode width.
Figure 13.
Curve of the relation between equivalent capacitance and electrode width.
According to the above analysis, it is known that in order to restrain the measurement error disturbance caused by the stray capacitance to earth of the electrodes, the electrode radius should be reduced, and the electrode width and distance between electrodes must be decreased on the premise of guaranteeing electrode insulation. In this way, more electrodes can be arranged in a small space and equivalent capacitance between electrodes will be increased to the largest extent possible. Thereby, voltage division ratio and measurement accuracy can be increased, and phase difference will be reduced.
Figure 14.
Curve of the relation between equivalent capacitance and number of electrodes.
Figure 14.
Curve of the relation between equivalent capacitance and number of electrodes.
5.3. Insulation Design of Sensor
If the electric field intensity borne by the dielectric medium used as insulating material on the sensor is higher than the critical electric field intensity of this medium, it will lose insulating ability and be damaged. Thus the insulating property will disappear, and partial discharges or short circuits between electrodes can occur. Therefore, the maximum electric field intensity distribution in the internal part and at the boundary of the sensor during application should be calculated, and the design of the sensor must be perfected to account for this. It has to possess good insulating properties under the stipulated voltage rating, and some surplus capacity must be reserved.
In the simulation calculations, the voltage of the conducting rod in the sensor was set as 10 kV. On the established model interface, it can be treated as a multi-dielectric coaxial cylindrical model composed of a guide rod, insulating sleeve, sensor and air. According to the relation between electric field intensity and boundary electric potential shown in
Figure 15 and
Figure 16, the distribution of the electric field intensity in different dielectric media on the model section is obtained through calculation.
Table 2 shows the parameters of multiple media and the critical electric field intensity.
According to the contrastive analysis provided in
Figure 15 and
Figure 16,
Table 2, under s power frequency electric field, the conducting rod is an equipotential body, the internal electric field intensity of the electrode is approximately 0, and the electric field intensity between the is at a low level. A strong electric field intensity is concentrated between the electrodes of the sensor and the highest electric field intensity is 8 kV/m, far lower than the critical electric field intensity of epoxy resin, 200 kV/cm as given in
Table 2. Therefore, sensor design completely meets the insulation design requirements.
Figure 15.
Electric field distribution diagram.
Figure 15.
Electric field distribution diagram.
Figure 16.
Distribution diagram of the electric field intensity in different media.
Figure 16.
Distribution diagram of the electric field intensity in different media.
Table 2.
Medium parameter.
Table 2.
Medium parameter.
| Medium | Dielectric Coefficient | Critical Electric Field Intensity (kV/cm) |
|---|
| Epoxy | 3.6 | 200–300 |
| Air | 1 | 25–30 |
6. Steady State Test Experiments
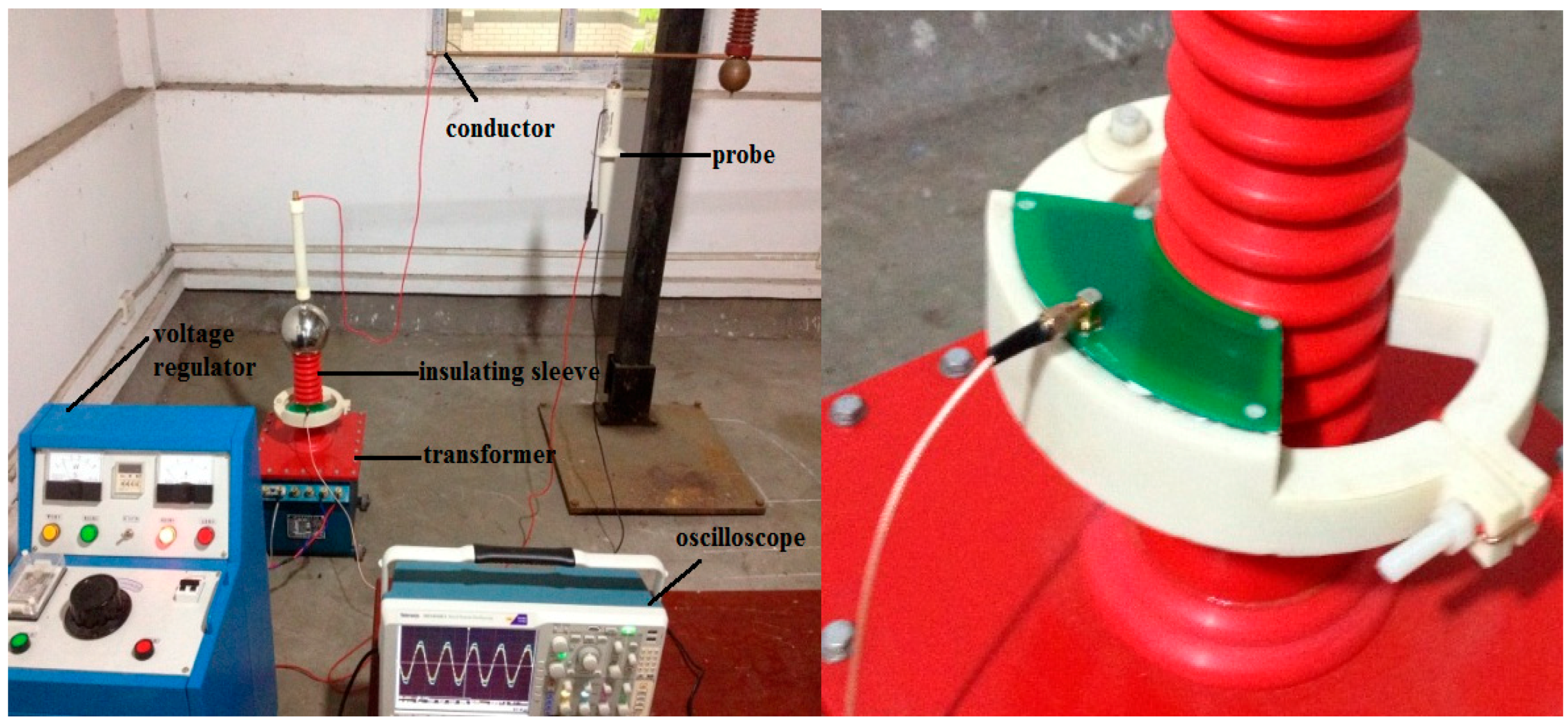
In order to verify the performance of the designed instrument transformer, an experimental platform is established, as shown in
Figure 17.
Figure 17.
Experimental platform.
Figure 17.
Experimental platform.
The platform is composed of a voltage regulator, transformer and single-phase wire. The voltage regulator has an input voltage of 220 V, output voltage of 0–200 V, and capacity of 50 kV/A, and it is single-phase. As for the transformer, the low voltage of its rated voltage is 200 V, the high voltage is 50 kV, the rated capacity is 10 kV/A, and it is single-phase. The voltage output range that can be realized by the voltage console composed of voltage regulator and transformer is 0–50 kV.
The P6051A high-voltage probe is a capacitance probe, and its compensation range is 7–49 pF. The bandwidth is 75 MHz and attenuation multiple is 1000. Within the measurement scope of 10 kV, its measurement accuracy for AC voltage is lower than 1.5%. The high-voltage probe is connected to the wire, and the output of the high-voltage probe is equal to the voltage value of the charged body in the insulating bush.
The oscilloscope used in the experiment is a Tektronix MOS5014B; the bandwidth is 1 GHz, it displays six significant digits, the vertical resolution is 11 digits, and the input sensitivity scope is 1 mV/div.
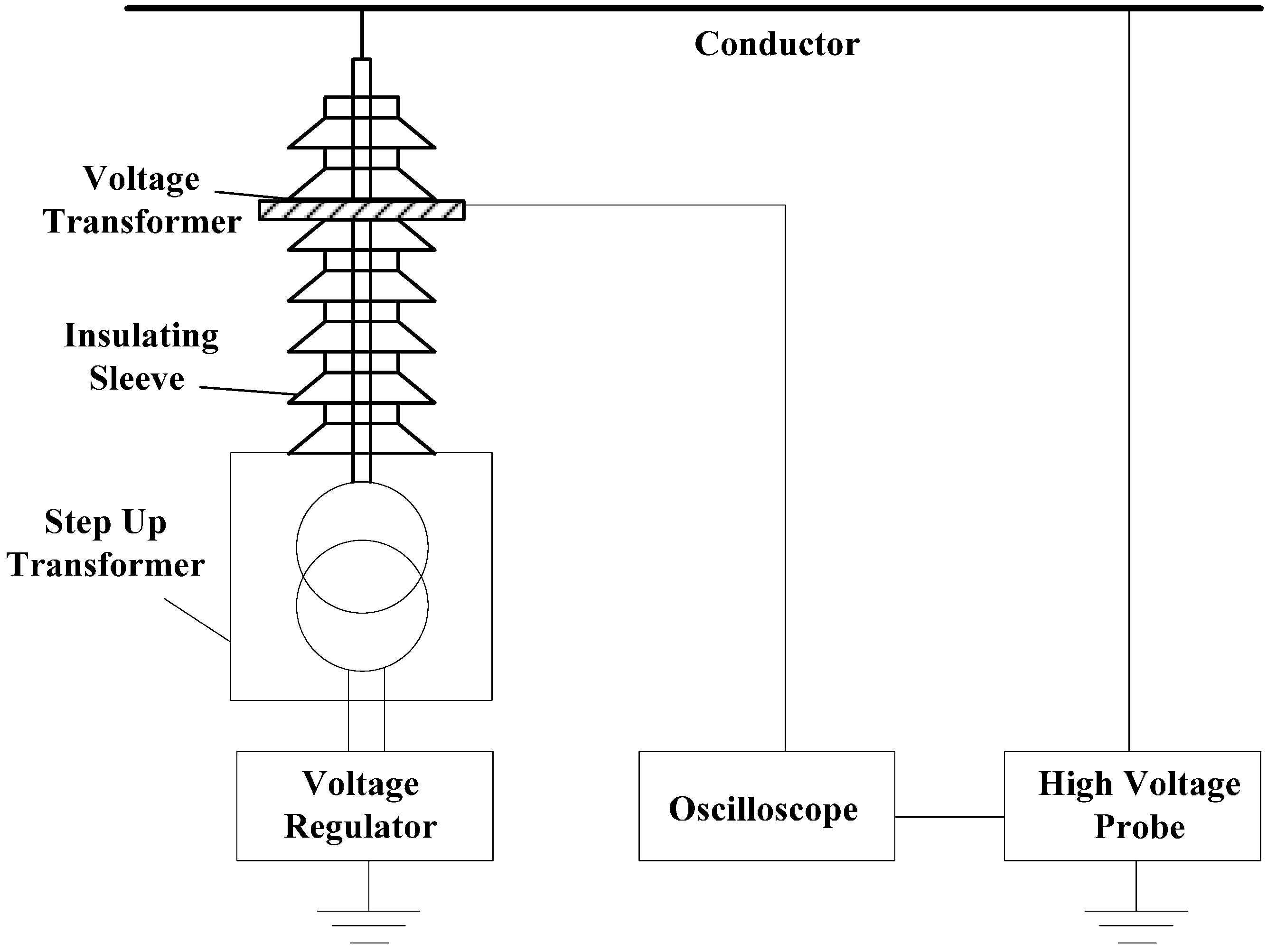
Figure 18.
Experiment platform diagram.
Figure 18.
Experiment platform diagram.
During the experiment, as shown in
Figure 18, the voltage regulator and transformer form the control part of voltage output, and the conducting rod of the transformer is connected to the conductor. The instrument transformer is stuck in the external part of insulating bush, and the high-voltage probe is suspended above the conductor. The output results of instrument transformer are compared with the output results of the high-voltage probe. It is verified that the output of the instrument transformer designed in this paper is in direct proportion to the conductor voltage. Besides, an experiment is made to verify whether the instrument transformer meets the expected voltage division ratio.
In the experiment, the sensor output voltages from 0 kV to 10 kV through the voltage regulator; signal waveforms of sensor and high-voltage probe under currents of 1, 2, 3, 4, 5, 6, 7, 8, 9 and 10 kV were collected and recorded. Moreover, the ratio error
ε% and phase difference
φ between the sensor signal and actual voltage signal were calculated according to the stipulations in the IEC60044-7 standard. The definitions are as follows:
In the formula, K is the rated transformation ratio of sensor and rated transformation ratio of sensor is 2000:1 after calibration.
US refers to the measurement signal voltage output by the voltage transducer, and
UH means the primary voltage measured by the voltage transducer, which is the value of converting the output voltage measured by the high-voltage probe as a standard apparatus into the primary side. The transformation ratio of the high-voltage probe is 1000:1.
φS is the output voltage phase of the voltage transducer and
φH means the output voltage phase of the high-voltage probe. See
Table 3 for the experimental data.
According to
Table 3, within the voltage range of 10 kV, the voltage ratio error of the voltage sensor designed on the basis of the electric field coupling principle
ε% < 0.5%, and phase difference
φ < 30′. Therefore, the measurement accuracy of such a voltage sensor under steady state conditions meets the requirements of actual measurement.
Table 3.
Measurement accuracy results of the voltage sensor.
Table 3.
Measurement accuracy results of the voltage sensor.
| Voltage (kV) | UH (kV) | US (kV) | ε/% | φ/(') |
|---|
| 1 | 0.975 | 0.489 | 0.23 | 35 |
| 2 | 2.013 | 1.001 | 0.20 | 31 |
| 3 | 3.051 | 1.510 | 0.15 | 27 |
| 4 | 3.977 | 1.990 | 0.09 | 25 |
| 5 | 5.014 | 2.504 | −0.11 | 19 |
| 6 | 5.965 | 2.990 | −0.25 | 22 |
| 7 | 7.109 | 3.543 | −0.31 | 17 |
| 8 | 8.071 | 4.025 | −0.27 | 16 |
| 9 | 8.986 | 4.479 | −0.32 | 21 |
| 10 | 9.951 | 4.963 | −0.26 | 30 |
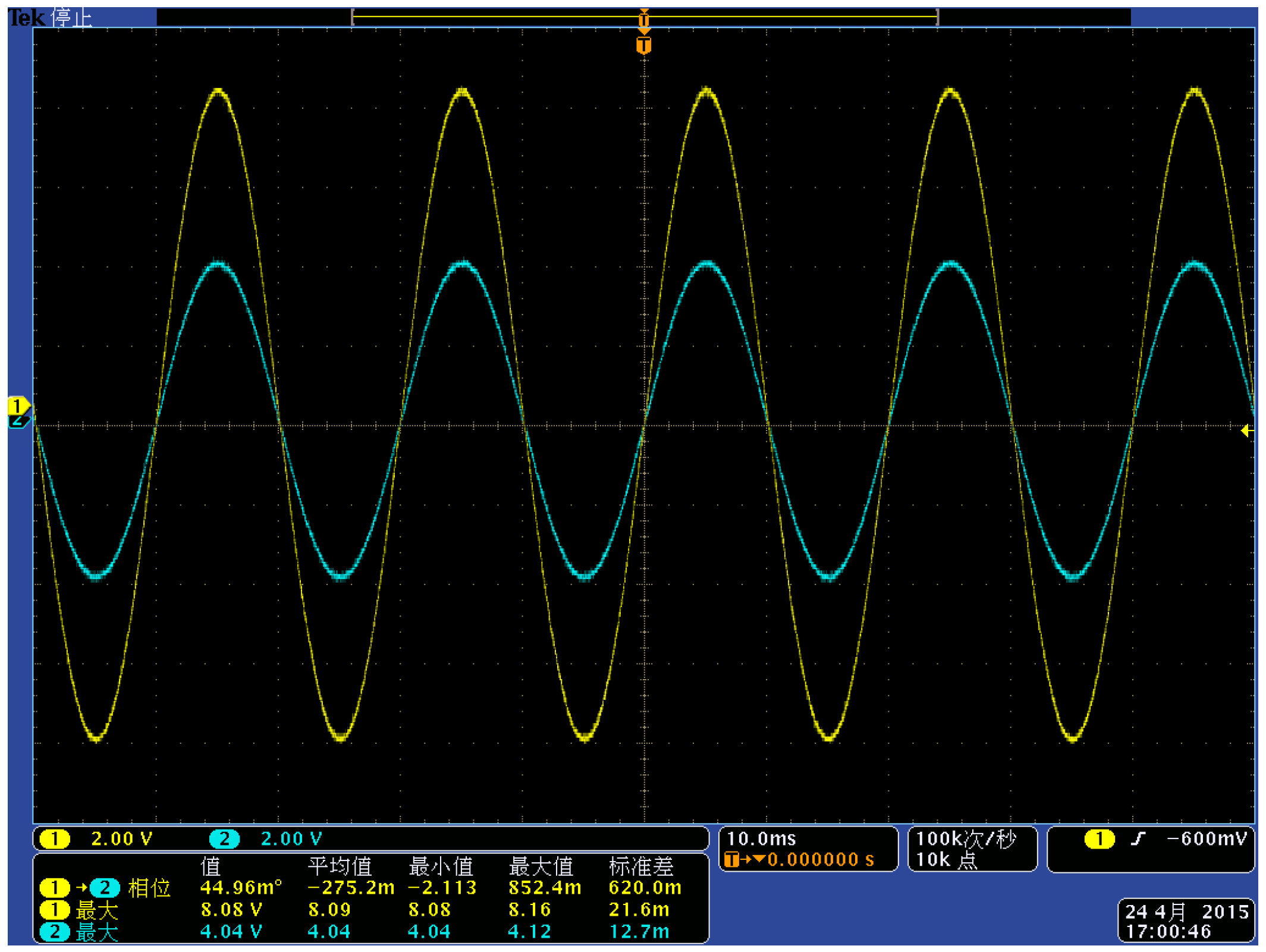
Figure 19.
Comparison diagram of waveform under the voltage class of 2 kV.
Figure 19.
Comparison diagram of waveform under the voltage class of 2 kV.
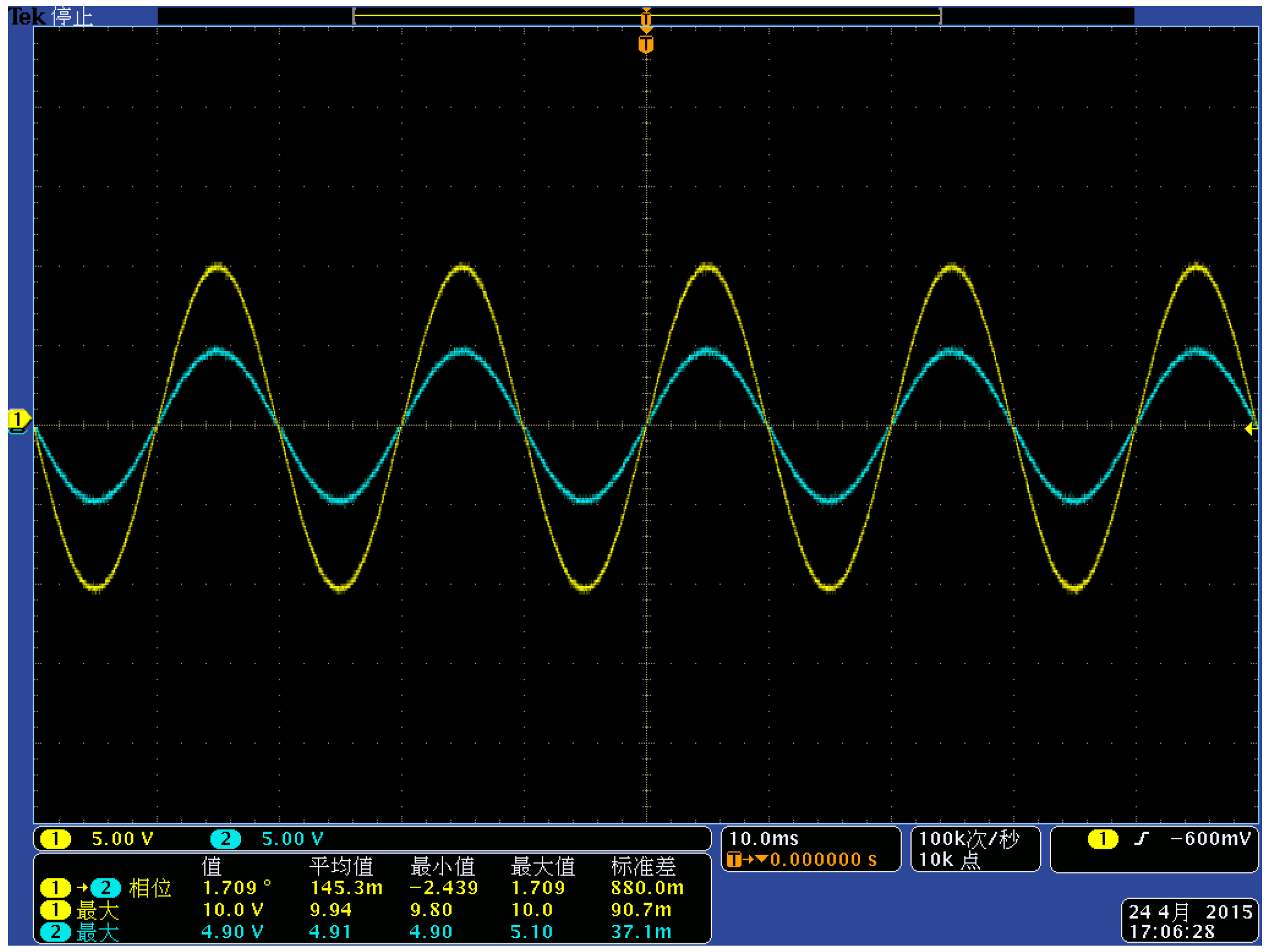
Figure 20.
Comparison diagram of waveform under the voltage class of 8 kV.
Figure 20.
Comparison diagram of waveform under the voltage class of 8 kV.
Figure 19 and
Figure 20 show the waveforms collected by the oscilloscope when the line voltage is 8 kV and 10 kV. Channel 1 is the signal waveform of the voltage sensor (yellow waveform) and channel 2 is the signal waveform of the high-voltage probe (blue waveform). According to
Figure 19 and
Figure 20, the sensor works in a self-integral state and the detection signal can follow the changes of the actual voltage waveform. The phase difference is small and the linearity is good. The following conclusions can be put forth according to
Table 3,
Figure 19 and
Figure 20:
- (1)
The measurement accuracy of the voltage sensor designed in this paper under steady state conditions is high and the phase error with the actual voltage is small. Therefore, it can meet the measurement requirements;
- (2)
The structural design of the voltage sensor can realize the situation where the sensor works in a self-integral state; the voltage division ratio reaches the design requirement of 2000:1;
- (3)
The experiments prove that the designed voltage sensor possesses good linearity, and it can realize non-contact detection for conductor voltages by measuring the electric field intensity around a charged conductor.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









