
Investigating the Potential of Using the Spatial and Spectral Information of Multispectral LiDAR for Object Classification





Abstract
:1. Introduction
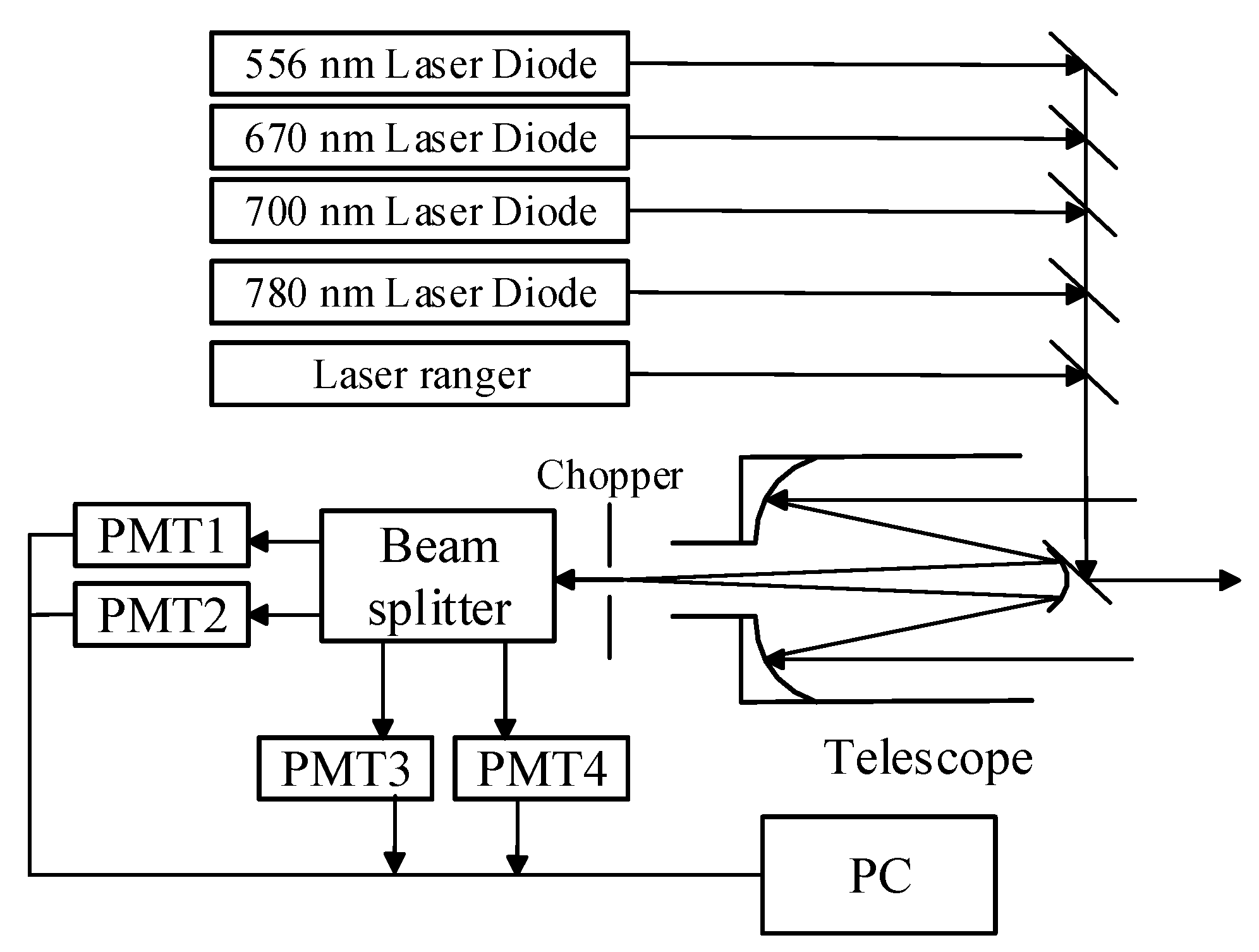
2. MSL System and Data Description


3. Method
3.1. Data Preprocessing
3.2. Classification

3.3. Assessment of Classification


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detecting System | Class | Ground Truth (Pixels) | ||||||
|---|---|---|---|---|---|---|---|---|
| Wall | Pots | Cactaceae | Carton | PF | HL | DL | ||
| L556 | Wall | 4982 | 0 | 1 | 11 | 4 | 2 | 1 |
| Pots | 6 | 1232 | 0 | 673 | 0 | 31 | 96 | |
| Cactaceae | 54 | 49 | 423 | 32 | 62 | 258 | 3 | |
| Carton | 1 | 423 | 113 | 2743 | 5 | 4 | 1 | |
| PF | 411 | 15 | 8 | 0 | 2201 | 19 | 4 | |
| HL | 6 | 33 | 318 | 45 | 22 | 2113 | 238 | |
| DL | 0 | 93 | 1 | 57 | 3 | 254 | 386 | |
| F-measurement | 95.25 | 63.46 | 48.76 | 80.19 | 88.84 | 77.45 | 50.69 | |
| Overall accuracy (%) 80.8 | ||||||||
| L670 | Wall | 4963 | 1 | 0 | 10 | 205 | 0 | 0 |
| Pots | 8 | 718 | 0 | 2248 | 0 | 4 | 2 | |
| Cactaceae | 61 | 11 | 790 | 0 | 62 | 476 | 5 | |
| Carton | 31 | 999 | 32 | 1081 | 187 | 843 | 126 | |
| PF | 396 | 15 | 15 | 1 | 1839 | 20 | 3 | |
| HL | 1 | 60 | 26 | 115 | 3 | 1121 | 0 | |
| DL | 0 | 41 | 1 | 96 | 1 | 217 | 593 | |
| F-measurement | 93.30 | 29.76 | 69.64 | 31.56 | 80.20 | 55.95 | 70.68 | |
| Overall accuracy (%) 63.7 | ||||||||
| L700 | Wall | 5308 | 6 | 1 | 4 | 54 | 1 | 1 |
| Pots | 0 | 936 | 0 | 129 | 1 | 0 | 7 | |
| Cactaceae | 138 | 49 | 552 | 74 | 39 | 763 | 13 | |
| Carton | 7 | 834 | 118 | 3235 | 21 | 153 | 453 | |
| PF | 1 | 0 | 0 | 0 | 2171 | 0 | 0 | |
| HL | 6 | 20 | 192 | 101 | 7 | 1650 | 60 | |
| DL | 0 | 0 | 1 | 8 | 4 | 114 | 195 | |
| F-measurement | 97.98 | 64.15 | 44.30 | 77.28 | 97.15 | 69.96 | 37.11 | |
| Overall accuracy (%) 80.6 | ||||||||
| L780 | Wall | 4972 | 0 | 0 | 11 | 146 | 3 | 0 |
| Pots | 2 | 1217 | 46 | 284 | 2 | 492 | 162 | |
| Cactaceae | 0 | 0 | 506 | 70 | 101 | 33 | 0 | |
| Carton | 5 | 282 | 3 | 2919 | 30 | 644 | 557 | |
| PF | 435 | 13 | 205 | 0 | 1894 | 27 | 4 | |
| HL | 46 | 325 | 103 | 263 | 123 | 1453 | 5 | |
| DL | 0 | 8 | 1 | 4 | 1 | 29 | 1 | |
| F-measurement | 93.88 | 60.10 | 64.29 | 73.05 | 77.71 | 58.13 | 0.26 | |
| Overall accuracy (%) 74.4 | ||||||||
| image | Wall | 4986 | 0 | 0 | 58 | 0 | 2 | 0 |
| Pots | 24 | 1380 | 1 | 49 | 255 | 0 | 25 | |
| Cactaceae | 3 | 3 | 559 | 94 | 0 | 190 | 2 | |
| Carton | 354 | 158 | 27 | 3266 | 58 | 32 | 53 | |
| PF | 58 | 224 | 0 | 3 | 1948 | 3 | 0 | |
| DL | 16 | 74 | 19 | 52 | 26 | 381 | 623 | |
| F-measurement | 94.92 | 77.12 | 65.19 | 87.11 | 85.95 | 81.26 | 64.90 | |
| Overall accuracy (%) 85.1 | ||||||||
| MSL | Wall | 5104 | 0 | 0 | 31 | 0 | 3 | 0 |
| Pots | 6 | 1584 | 0 | 44 | 19 | 0 | 33 | |
| Cactaceae | 3 | 3 | 563 | 96 | 0 | 189 | 2 | |
| Carton | 208 | 168 | 26 | 3300 | 40 | 25 | 56 | |
| PF | 103 | 15 | 1 | 3 | 2198 | 6 | 0 | |
| HL | 28 | 6 | 258 | 29 | 11 | 2094 | 19 | |
| DL | 8 | 69 | 16 | 48 | 29 | 364 | 619 | |
| F-measurement | 96.32 | 89.72 | 65.46 | 89.50 | 95.09 | 81.70 | 65.78 | |
| Overall accuracy (%) 88.7 | ||||||||
| L556 | L670 | L700 | L780 | Image | MSL | |
|---|---|---|---|---|---|---|
| QD | 0.05 | 0.11 | 0.12 | 0.09 | 0.05 | 0.04 |
| AD | 0.15 | 0.25 | 0.08 | 0.17 | 0.10 | 0.07 |
| KC | 0.76 | 0.55 | 0.76 | 0.68 | 0.82 | 0.86 |
4. Results and Discussion


5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Tucker, C.J.; Townshend, J.R.; Goff, T.E. African land-cover classification using satellite data. Science 1985, 227, 369–375. [Google Scholar] [CrossRef] [PubMed]
- Sivertson, W.; Wilson, R.G.; Bullock, G.F.; Schappell, R. Feature identification and location experiment. Science 1982, 218, 1031–1033. [Google Scholar] [CrossRef] [PubMed]
- Kraus, K.; Pfeifer, N. Determination of terrain models in wooded areas with airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar] [CrossRef]
- Næsset, E.; Økland, T. Estimating tree height and tree crown properties using airborne scanning laser in a boreal nature reserve. Remote Sens. Environ. 2002, 79, 105–115. [Google Scholar] [CrossRef]
- Woodhouse, I.H.; Nichol, C.; Sinclair, P.; Jack, J.; Morsdorf, F.; Malthus, T.J.; Patenaude, G. A multispectral canopy lidar demonstrator project. IEEE Geosci. Remote Sens. Lett. 2011, 8, 839–843. [Google Scholar] [CrossRef]
- Wei, G.; Shalei, S.; Bo, Z.; Shuo, S.; Faquan, L.; Xuewu, C. Multi-wavelength canopy lidar for remote sensing of vegetation: Design and system performance. ISPRS J. Photogramm. Remote Sens. 2012, 69, 1–9. [Google Scholar] [CrossRef]
- Hakala, T.; Suomalainen, J.; Kaasalainen, S.; Chen, Y. Full waveform hyperspectral lidar for terrestrial laser scanning. Opt. Express 2012, 20, 7119–7127. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Räikkönen, E.; Kaasalainen, S.; Suomalainen, J.; Hakala, T.; Hyyppä, J.; Chen, R. Two-channel hyperspectral lidar with a supercontinuum laser source. Sensors 2010, 10, 7057–7066. [Google Scholar] [CrossRef] [PubMed]
- Kaasalainen, S.; Lindroos, T.; Hyyppa, J. Toward hyperspectral lidar: Measurement of spectral backscatter intensity with a supercontinuum laser source. IEEE Geosci. Remote Sens. Lett. 2007, 4, 211–215. [Google Scholar] [CrossRef]
- Jack, J.; Rumi, E.; Henry, D.; Woodhouse, I.; Nichol, C.; Macdonald, M. The Design of a Space-Borne Multispectral Canopy Lidar to Estimate Global Carbon Stock and Gross Primary Productivity. In Proceedings of the SPIE Remote Sensing International Society for Optics and Photonics, Prague, Czech Republic, 19 September 2011.
- Morsdorf, F.; Nichol, C.; Malthus, T.; Woodhouse, I.H. Assessing forest structural and physiological information content of multi-spectral lidar waveforms by radiative transfer modelling. Remote Sens. Environ. 2009, 113, 2152–2163. [Google Scholar] [CrossRef]
- Gaulton, R.; Danson, F.; Ramirez, F.; Gunawan, O. The potential of dual-wavelength laser scanning for estimating vegetation moisture content. Remote Sens. Environ. 2013, 132, 32–39. [Google Scholar] [CrossRef]
- Nevalainen, O.; Hakala, T.; Suomalainen, J.; Mäkipää, R.; Peltoniemi, M.; Krooks, A.; Kaasalainen, S. Fast and nondestructive method for leaf level chlorophyll estimation using hyperspectral lidar. Agric. Forest Meteorol. 2014, 198, 250–258. [Google Scholar] [CrossRef]
- Hancock, S.; Lewis, P.; Foster, M.; Disney, M.; Muller, J.P. Measuring forests with dual wavelength lidar: A simulation study over topography. Agric. Forest Meteorol. 2012, 161, 123–133. [Google Scholar] [CrossRef]
- Suomalainen, J.; Hakala, T.; Kaartinen, H.; Räikkönen, E.; Kaasalainen, S. Demonstration of a virtual active hyperspectral lidar in automated point cloud classification. ISPRS J. Photogramm. Remote Sens. 2011, 66, 637–641. [Google Scholar] [CrossRef]
- Wang, C.-K.; Tseng, Y.-H.; Chu, H.-J. Airborne dual-wavelength lidar data for classifying land cover. Remote Sens. 2014, 6, 700–715. [Google Scholar] [CrossRef]
- Vauhkonen, J.; Hakala, T.; Suomalainen, J.; Kaasalainen, S.; Nevalainen, O.; Vastaranta, M.; Holopainen, M.; Hyyppa, J. Classification of spruce and pine trees using active hyperspectral lidar. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1138–1141. [Google Scholar] [CrossRef]
- Puttonen, E.; Hakala, T.; Nevalainen, O.; Kaasalainen, S.; Krooks, A.; Karjalainen, M.; Anttila, K. Artificial target detection with a hyperspectral lidar over 26-h measurement. Opt. Eng. 2015, 54, 013105. [Google Scholar] [CrossRef]
- Pfennigbauer, M.; Ullrich, A. Improving quality of laser scanning data acquisition through calibrated amplitude and pulse deviation measurement. In Proceedings of the International Society for Optics and Photonics (SPIE) Defense and Security Symposium, Orlando, FL, USA, 5–9 April 2010.
- Höfle, B.; Pfeifer, N. Correction of laser scanning intensity data: Data and model-driven approaches. ISPRS J. Photogramm. Remote Sens. 2007, 62, 415–433. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Jaakkola, A.; Kaasalainen, M.; Krooks, A.; Kukko, A. Analysis of incidence angle and distance effects on terrestrial laser scanner intensity: Search for correction methods. Remote Sens. 2011, 3, 2207–2221. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Pyysalo, U.; Krooks, A.; Vain, A.; Kukko, A.; Hyyppä, J.; Kaasalainen, M. Absolute radiometric calibration of als intensity data: Effects on accuracy and target classification. Sensors 2011, 11, 10586–10602. [Google Scholar] [CrossRef] [PubMed]
- Wagner, W. Radiometric calibration of small-footprint full-waveform airborne laser scanner measurements: Basic physical concepts. ISPRS J. Photogramm. Remote Sens. 2010, 65, 505–513. [Google Scholar] [CrossRef]
- Shi, S.; Song, S.; Gong, W.; Du, L.; Zhu, B.; Huang, X. Improving backscatter intensity calibration for multispectral lidar. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1421–1425. [Google Scholar] [CrossRef]
- Habib, A.F.; Kersting, A.P.; Shaker, A.; Yan, W.-Y. Geometric calibration and radiometric correction of lidar data and their impact on the quality of derived products. Sensors 2011, 11, 9069–9097. [Google Scholar] [CrossRef] [PubMed]
- Joachims, T. Text Categorization with Support Vector Machines: Learning with Many Relevant Features; Springer: Berlin, Germany, 1998. [Google Scholar]
- Melgani, F.; Bruzzone, L. Classification of hyperspectral remote sensing images with support vector machines. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1778–1790. [Google Scholar] [CrossRef]
- Pontil, M.; Verri, A. Support vector machines for 3d object recognition. IEEE Trans Pattern Anal. Mach. Intell. 1998, 20, 637–646. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Wu, X.; Kumar, V.; Quinlan, J.R.; Ghosh, J.; Yang, Q.; Motoda, H.; McLachlan, G.J.; Ng, A.; Liu, B.; Philip, S.Y. Top 10 algorithms in data mining. Knowl. Inf. Syst. 2008, 14, 1–37. [Google Scholar] [CrossRef]
- Hsu, C.-W.; Lin, C.-J. A comparison of methods for multiclass support vector machines. IEEE Trans. Neural Netw. 2002, 13, 415–425. [Google Scholar] [PubMed]
- Baeza-Yates, R.; Frakes, W.B. Information Retrieval: Data Structures & Algorithms; Prentice Hall: Upper Saddle River, NJ, USA, 1992. [Google Scholar]
- Pontius, R.G., Jr.; Millones, M. Death to kappa: Birth of quantity disagreement and allocation disagreement for accuracy assessment. Int. J. Remote Sens. 2011, 32, 4407–4429. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, W.; Sun, J.; Shi, S.; Yang, J.; Du, L.; Zhu, B.; Song, S. Investigating the Potential of Using the Spatial and Spectral Information of Multispectral LiDAR for Object Classification. Sensors 2015, 15, 21989-22002. https://doi.org/10.3390/s150921989
Gong W, Sun J, Shi S, Yang J, Du L, Zhu B, Song S. Investigating the Potential of Using the Spatial and Spectral Information of Multispectral LiDAR for Object Classification. Sensors. 2015; 15(9):21989-22002. https://doi.org/10.3390/s150921989
Chicago/Turabian StyleGong, Wei, Jia Sun, Shuo Shi, Jian Yang, Lin Du, Bo Zhu, and Shalei Song. 2015. "Investigating the Potential of Using the Spatial and Spectral Information of Multispectral LiDAR for Object Classification" Sensors 15, no. 9: 21989-22002. https://doi.org/10.3390/s150921989
APA StyleGong, W., Sun, J., Shi, S., Yang, J., Du, L., Zhu, B., & Song, S. (2015). Investigating the Potential of Using the Spatial and Spectral Information of Multispectral LiDAR for Object Classification. Sensors, 15(9), 21989-22002. https://doi.org/10.3390/s150921989