
Design and Realization of a Three Degrees of Freedom Displacement Measurement System Composed of Hall Sensors Based on Magnetic Field Fitting by an Elliptic Function

Abstract
:1. Introduction
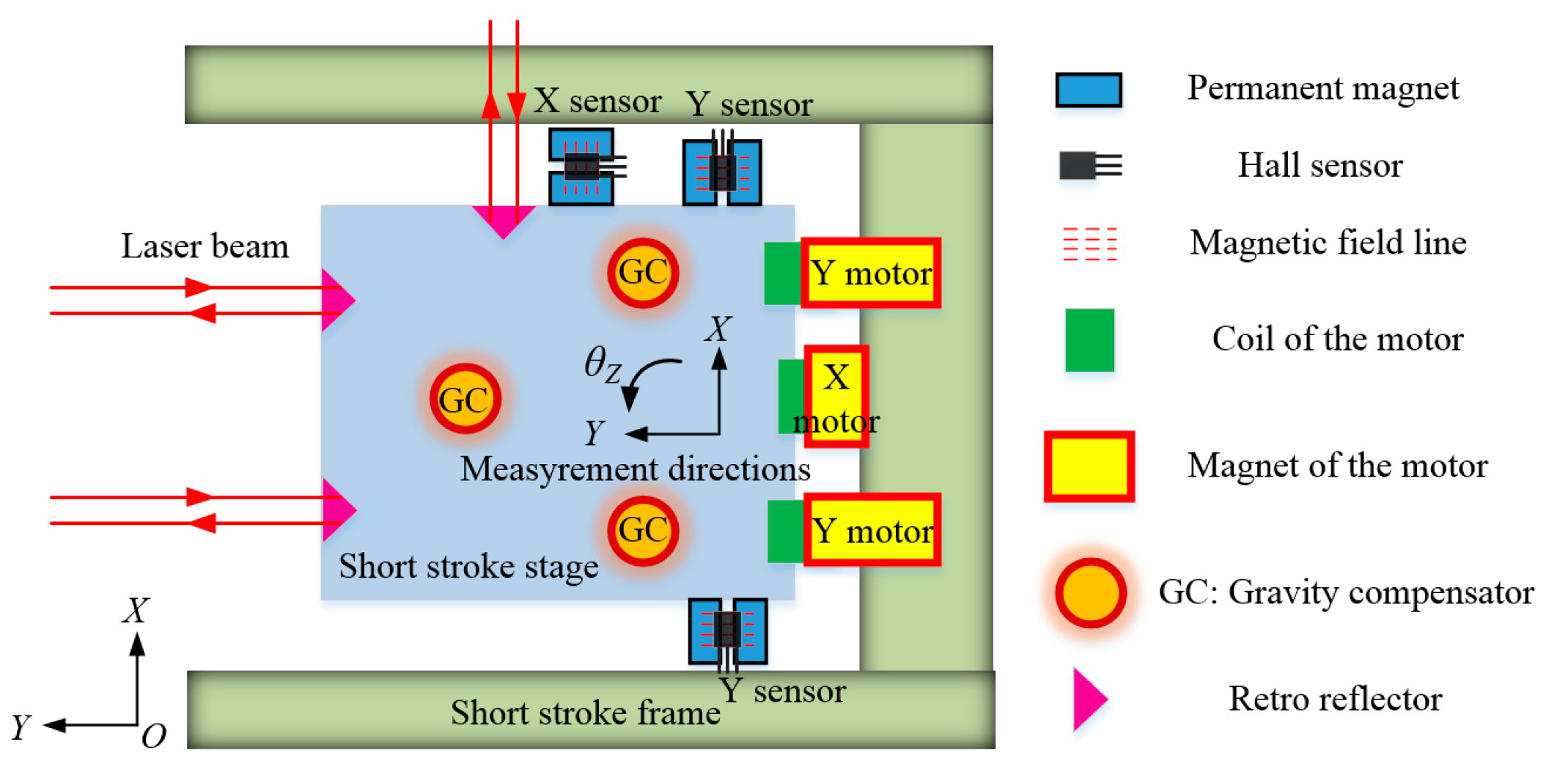
2. Description of the Measurement System

3. Model Analysis
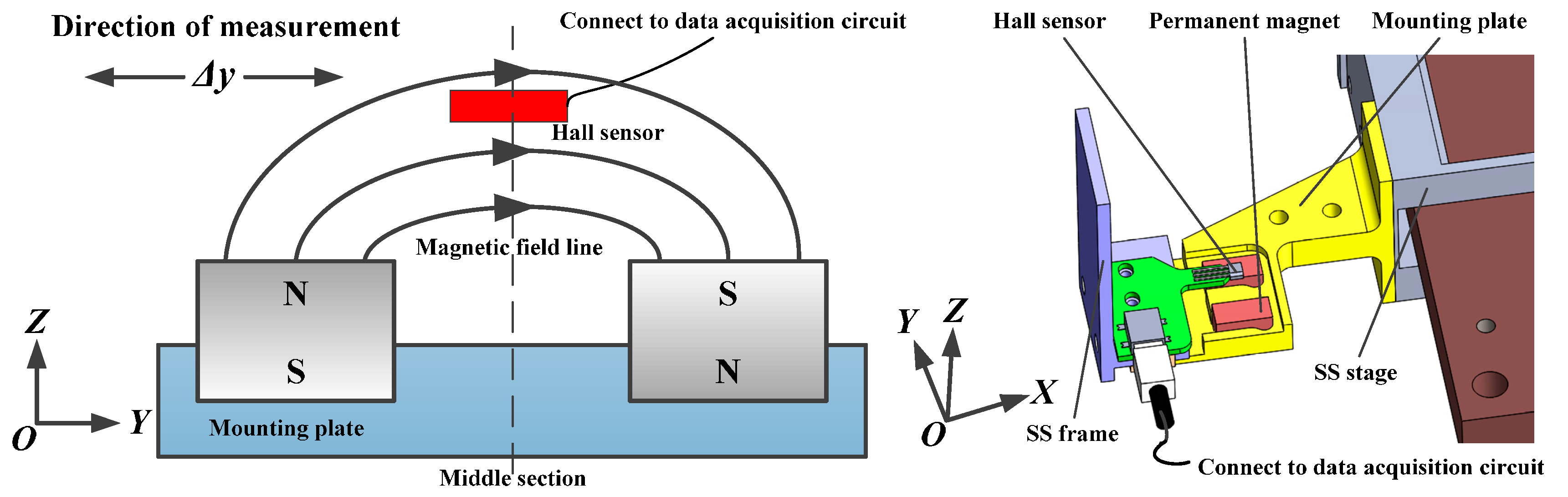
3.1. Installation of the Hall Sensor


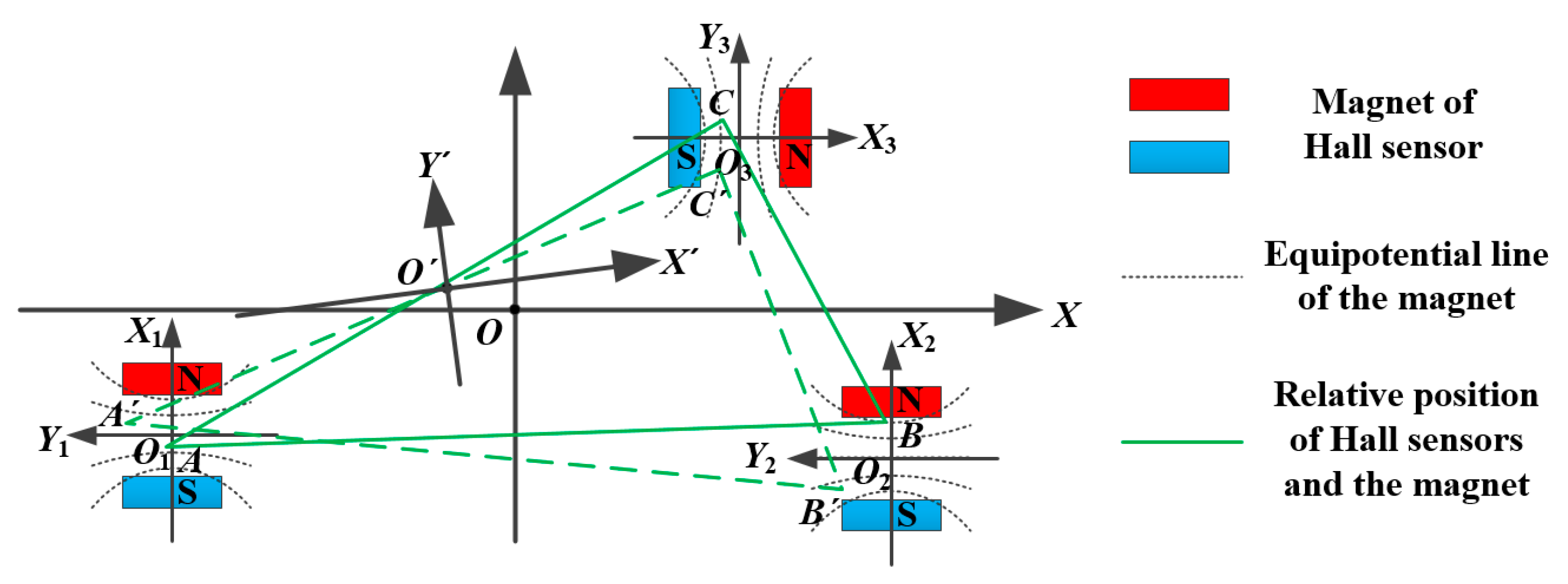
3.2. 3-DOF Measuring Principle

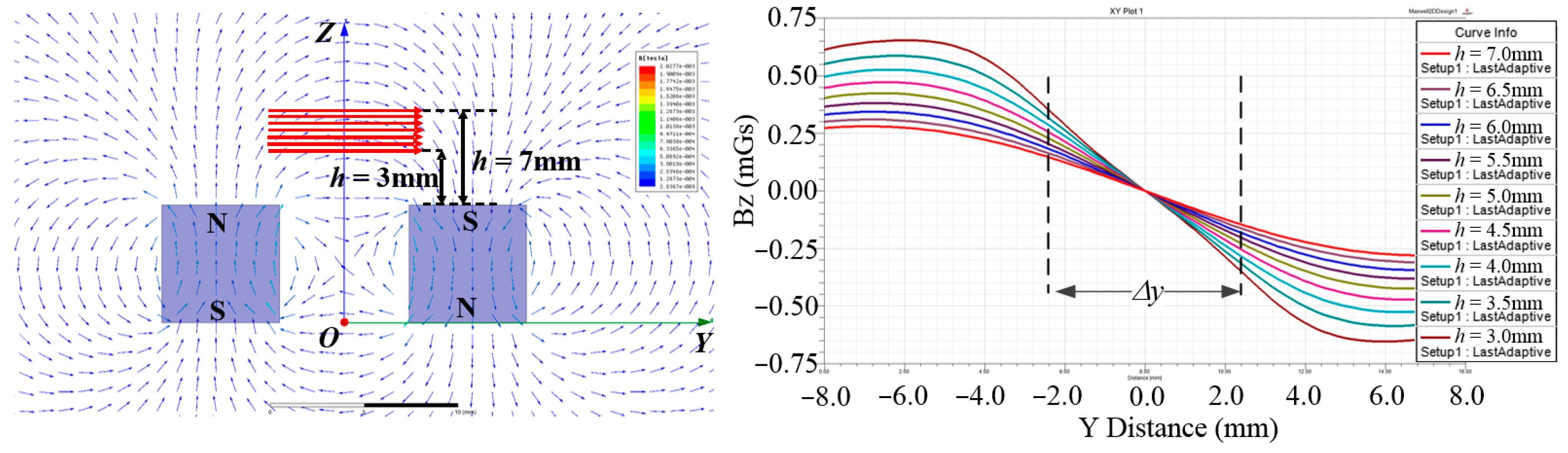
4. Magnetic Field Fitting by an Elliptic Function

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Expression |
|---|---|
| Elliptic | |
| Parabolic | |
| Hyperbolic |
4.1. Data Collecting System



4.2. Magnetic Field Fitting by Elliptic Function


| Voltage of Equipotential Line | Variance of Fitting Data | Voltage of Equipotential Line | Variance of Fitting Data | ||||
|---|---|---|---|---|---|---|---|
| Parabola | Ellipse | Hyperbola | Parabola | Ellipse | Hyperbola | ||
| −2.0 | 1.36 × 10−5 | 1.97 × 10−6 | 1.37 × 10−5 | 0.0 | 1.66 × 10−7 | 1.65 × 10−7 | 1.72 × 10−6 |
| −1.8 | 1.29 × 10−4 | 9.33 × 10−6 | 1.30 × 10−4 | 0.2 | 4.97 × 10−6 | 3.21 × 10−6 | 4.98 × 10−6 |
| −1.6 | 1.47 × 10−4 | 1.03 × 10−6 | 1.48 × 10−4 | 0.4 | 4.54 × 10−6 | 1.71 × 10−7 | 4.58 × 10−6 |
| −1.4 | 9.28 × 10−5 | 1.06 × 10−6 | 9.33 × 10−5 | 0.6 | 1.02 × 10−5 | 1.45 × 10−7 | 1.03 × 10−5 |
| −1.2 | 5.90 × 10−5 | 8.40 × 10−6 | 5.93 × 10−5 | 0.8 | 2.43 × 10−5 | 5.40 × 10−7 | 2.45 × 10−5 |
| −1.0 | 3.71 × 10−5 | 3.75 × 10−7 | 3.73 × 10−5 | 1.0 | 3.94 × 10−5 | 5.03 × 10−7 | 3.96 × 10−5 |
| −0.8 | 1.90 × 10−5 | 2.58 × 10−7 | 1.91 × 10−5 | 1.2 | 6.06 × 10−5 | 4.74 × 10−7 | 6.10 × 10−5 |
| −0.6 | 1.01 × 10−5 | 1.96 × 10−7 | 1.01 × 10−5 | 1.4 | 2.00 × 10−5 | 1.91 × 10−7 | 2.02 × 10−5 |
| −0.4 | 4.82 × 10−6 | 1.21 × 10−7 | 4.84 × 10−6 | 1.6 | 1.02 × 10−7 | 1.29 × 10−9 | 1.02 × 10−7 |
| −0.2 | 1.20 × 10−6 | 2.05 × 10−7 | 1.20 × 10−6 | -- | -- | -- | -- |
| Variance of mean | 3.57 × 10−5 | 6.52 × 10−7 | 3.60 × 10−5 | -- | -- | -- | -- |
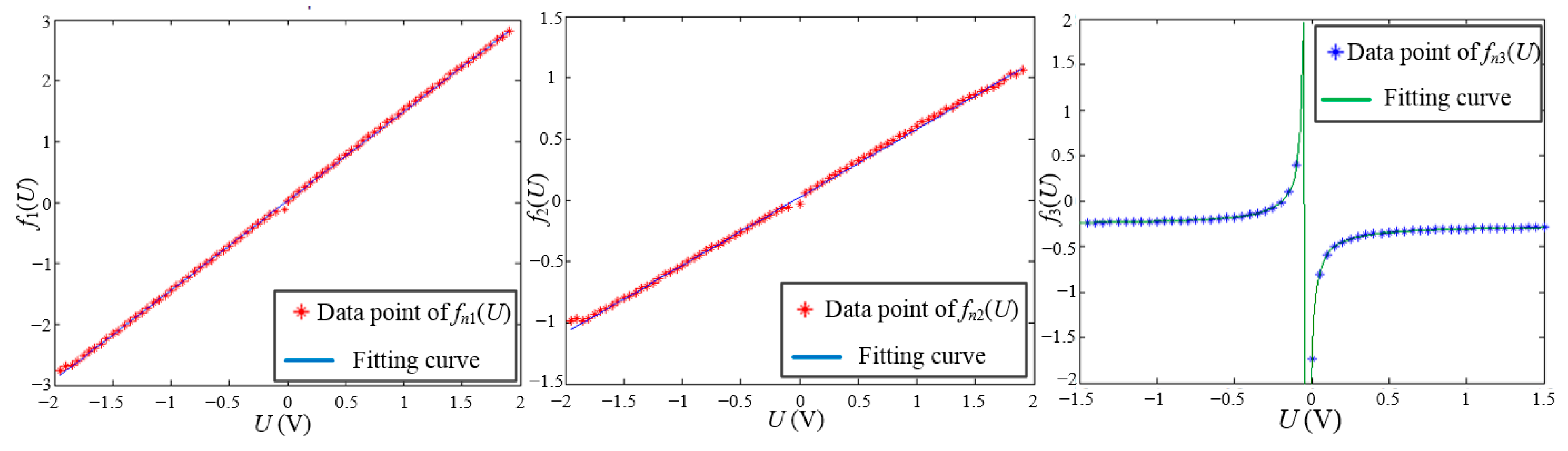
- The curve represented by fn1(U) is approximately linear if the outliers on both ends are ignored, and can be fitted by a linear function given as fn1(U) = a∙U + b;
- The curve represented by fn2(U) is symmetric to the vertical axis U = 0 V, and is also approximately linear on one side, so it can be fitted by the absolute form of a linear function as fn2(U) = −|c∙U + d|. Taking the quadratic form of parameter fn2(U) in Equation (6) into account, the term fn2(U) could also be expressed by fn2(U) = c∙U + d;
- The curve represented by fn3(U) is similar to an inversely proportional function, which can be written as fn3(U) = p/(U + q) + m;
- The curve represented by fn4(U) is composed of irregular points. However, the effect of fn4(U) on the elliptic function mainly concentrates on the degree of convergence of the curvature radius of the equipotential lines, which influences more the points far from the origin but less near the origin, so that the fn4(U) is considered to be constant in the elliptic function.



5. Performance







6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lee, C.B.; Lee, S.K. Multi-degree-of-freedom motion error measurement in an ultraprecision machine using laser encoder—Review. J. Mech. Sci. Technol. 2013, 27, 141–152. [Google Scholar] [CrossRef]
- Aktakka, E.E.; Woo, J.K.; Egert, D.; Gordenker, R.J.M.; Najafi, K.A. Microactuation and sensing platform with active lockdown for in situ calibration of scale factor drifts in dual-axis gyroscopes. IEEE/ASME T. Mech. 2015, 20, 934–943. [Google Scholar] [CrossRef]
- Kim, J.A.; Bae, E.W.; Kim, S.H.; Kwak, Y.K. Design methods for six-degree-of-freedom displacement measurement systems using cooperative targets. Precis. Eng. 2002, 26, 99–104. [Google Scholar] [CrossRef]
- Mura, A. Multi-dofs MEMS displacement sensors based on the Stewart platform theory. Microsyst. Technol. 2012, 18, 575–579. [Google Scholar] [CrossRef]
- Mura, A. Sensitivity analysis of a six degrees of freedom displacement measuring device. J. Mech. Eng. Sci. 2014, 228, 158–168. [Google Scholar] [CrossRef]
- Allred, C.J.; Mark, R.J.; Gregory, D.B. Real-time estimation of helicopter blade kinematics using integrated linear displacement sensors. Aerosp. Sci. Technol. 2015, 42, 274–286. [Google Scholar] [CrossRef]
- Rhyu, S.H.; Jung, I.S.; Kwon, B.I. 2-D modeling and characteristic analysis of a magnetic position sensor. IEEE Trans. Magn. 2005, 41, 1828–1831. [Google Scholar] [CrossRef]
- Han, X.T.; Cao, Q.L.; Wang, M. A linear Hall Effect displacement sensor using a stationary two-pair coil system. In Proceedings of IEEE International Instrumentation and Measurement Technology Conference, Hangzhou, China, 10–12 May 2011; pp. 1342–1345.
- Mohammed, H.A.; Bending, S.J. Fabrication of nanoscale Bi Hall sensors by lift-off technique for applications in scanning probe microscope. Semicond. Sci. Tech. 2014, 29. [Google Scholar] [CrossRef]
- Manzin, A.; Nabaei, V. Modelling of micro-Hall sensors for magnetization imaging. J. Appl. Phys. 2014, 115. [Google Scholar] [CrossRef]
- Xu, Y.; Pan, H.B.; He, S.Z.; Li, L. A highly sensitive CMOS digital Hall Sensor for low magnetic field applications. Sensors 2012, 12, 2162–2174. [Google Scholar] [CrossRef] [PubMed]
- Hyeonh, J.A.; Kyoung, R.K. 2D Hall sensor array for measuring the position of a magnet matrix. Int. J. Precis. Eng. Man. Green Technol. 2014, 1, 125–129. [Google Scholar]
- Kim, S.Y.; Choi, C.; Lee, K.; Lee, W. An improved rotor position estimation with vector—Tracking observer in PMSM drives with low-resolution Hall-effect sensors. IEEE Trans. Ind. Electron. 2011, 58, 4078–4086. [Google Scholar]
- Norhisam, M.; Ng, W.S.; Suhaidi, S.; Mohd, H.M.; Nashiren, F.M. A mobile ferromagnetic shape detection sensor using a Hall sensor array and magnetic imaging. Sensors 2011, 11, 10474–10489. [Google Scholar]
- Kim, K.W.; Torati, S.R.; Reddy, V.; Yoon, S.S. Planar Hall resistance sensor for monitoring current. J. Magn. 2014, 19, 151–154. [Google Scholar] [CrossRef]
- Jiang, J.; Makinwa, K.A.A.; Kindt, W.J. A continuous-time ripple reduction technique for spinning-current Hall sensors. IEEE J. Solid-St. Circ. 2014, 49, 1525–1534. [Google Scholar] [CrossRef]
- Kim, W.J.; Shobhit, V.; Huzefa, S. Design and precision construction of novel magnetic-levitation-based multi-axis nanoscale positioning systems. Precis. Eng. 2007, 31, 337–350. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, B.; Wang, L.; Tan, J.-B. Design and Realization of a Three Degrees of Freedom Displacement Measurement System Composed of Hall Sensors Based on Magnetic Field Fitting by an Elliptic Function. Sensors 2015, 15, 22530-22546. https://doi.org/10.3390/s150922530
Zhao B, Wang L, Tan J-B. Design and Realization of a Three Degrees of Freedom Displacement Measurement System Composed of Hall Sensors Based on Magnetic Field Fitting by an Elliptic Function. Sensors. 2015; 15(9):22530-22546. https://doi.org/10.3390/s150922530
Chicago/Turabian StyleZhao, Bo, Lei Wang, and Jiu-Bin Tan. 2015. "Design and Realization of a Three Degrees of Freedom Displacement Measurement System Composed of Hall Sensors Based on Magnetic Field Fitting by an Elliptic Function" Sensors 15, no. 9: 22530-22546. https://doi.org/10.3390/s150922530
APA StyleZhao, B., Wang, L., & Tan, J. -B. (2015). Design and Realization of a Three Degrees of Freedom Displacement Measurement System Composed of Hall Sensors Based on Magnetic Field Fitting by an Elliptic Function. Sensors, 15(9), 22530-22546. https://doi.org/10.3390/s150922530