
Time Reversal Acoustic Communication Using Filtered Multitone Modulation


Abstract
:1. Introduction
2. System Model of the TR Acoustic Communication Using FMT
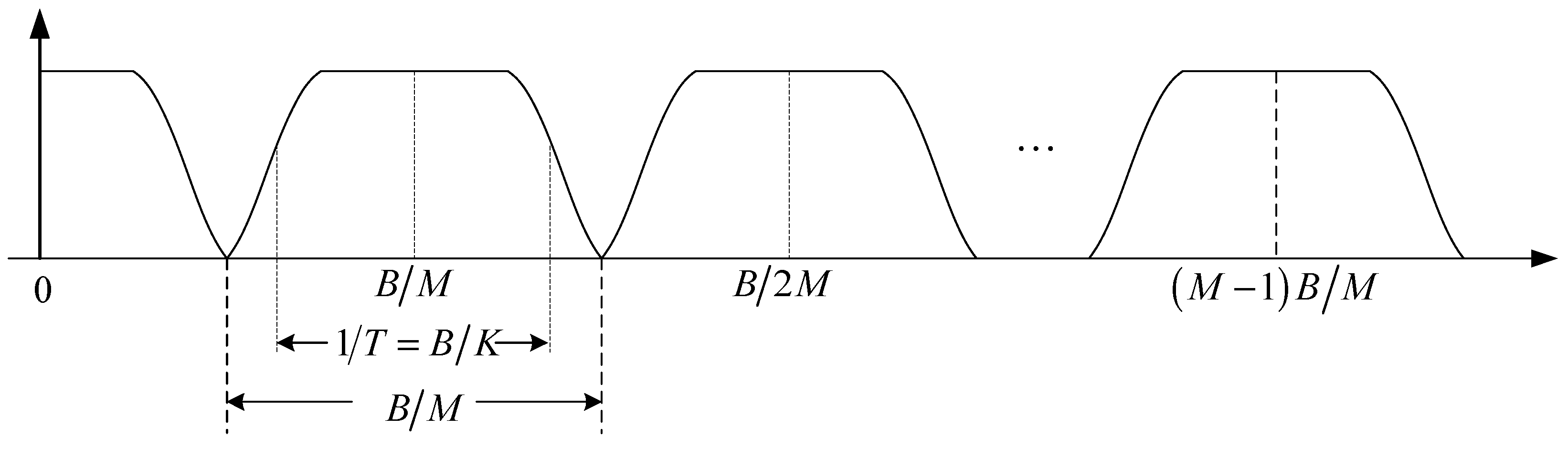
2.1. Transmit Structure


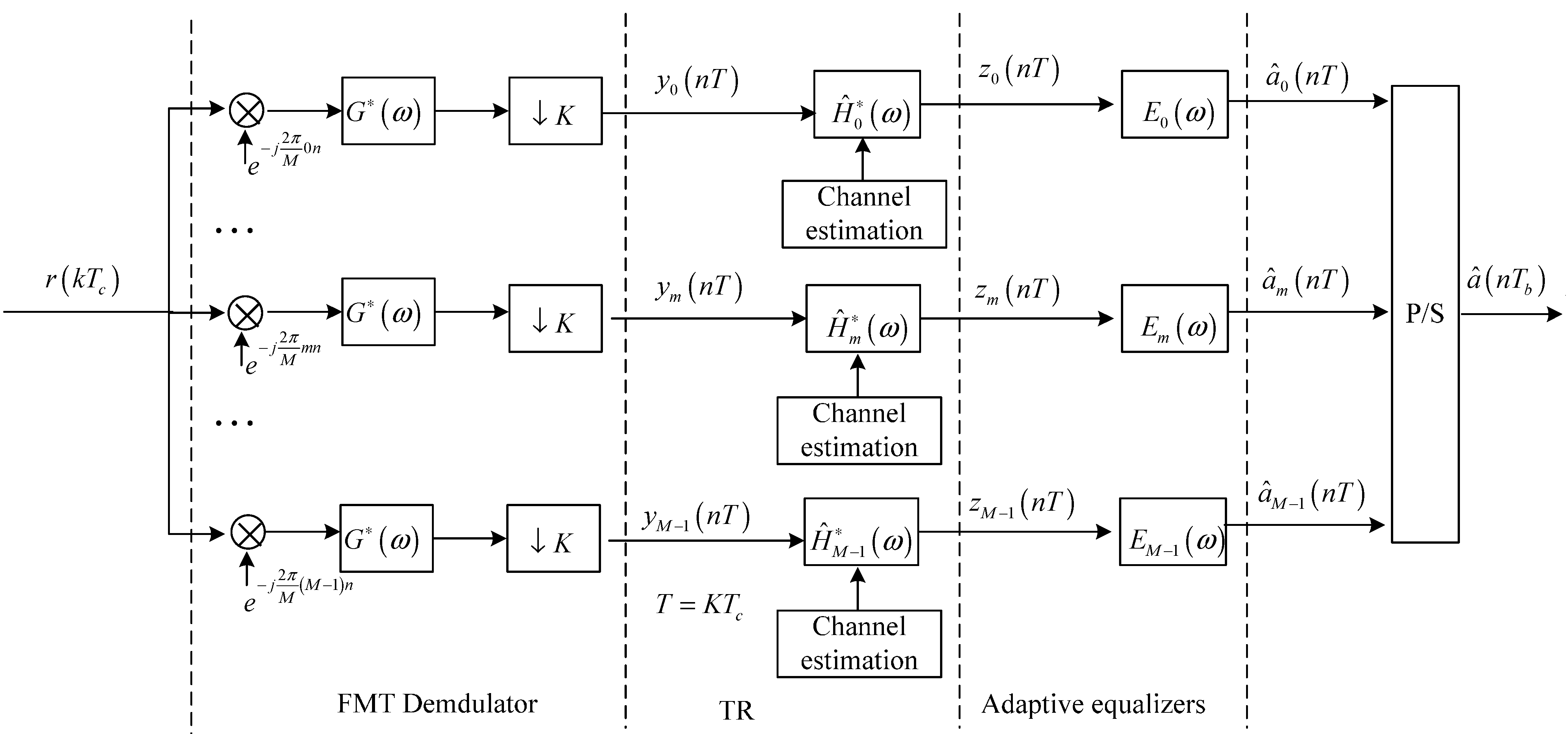
2.2. Receive Structure
2.2.1. FMT Demodulation

2.2.2. TR Process
2.2.3. Adaptive Equalization
3. Performance Assessment
3.1. Simulation
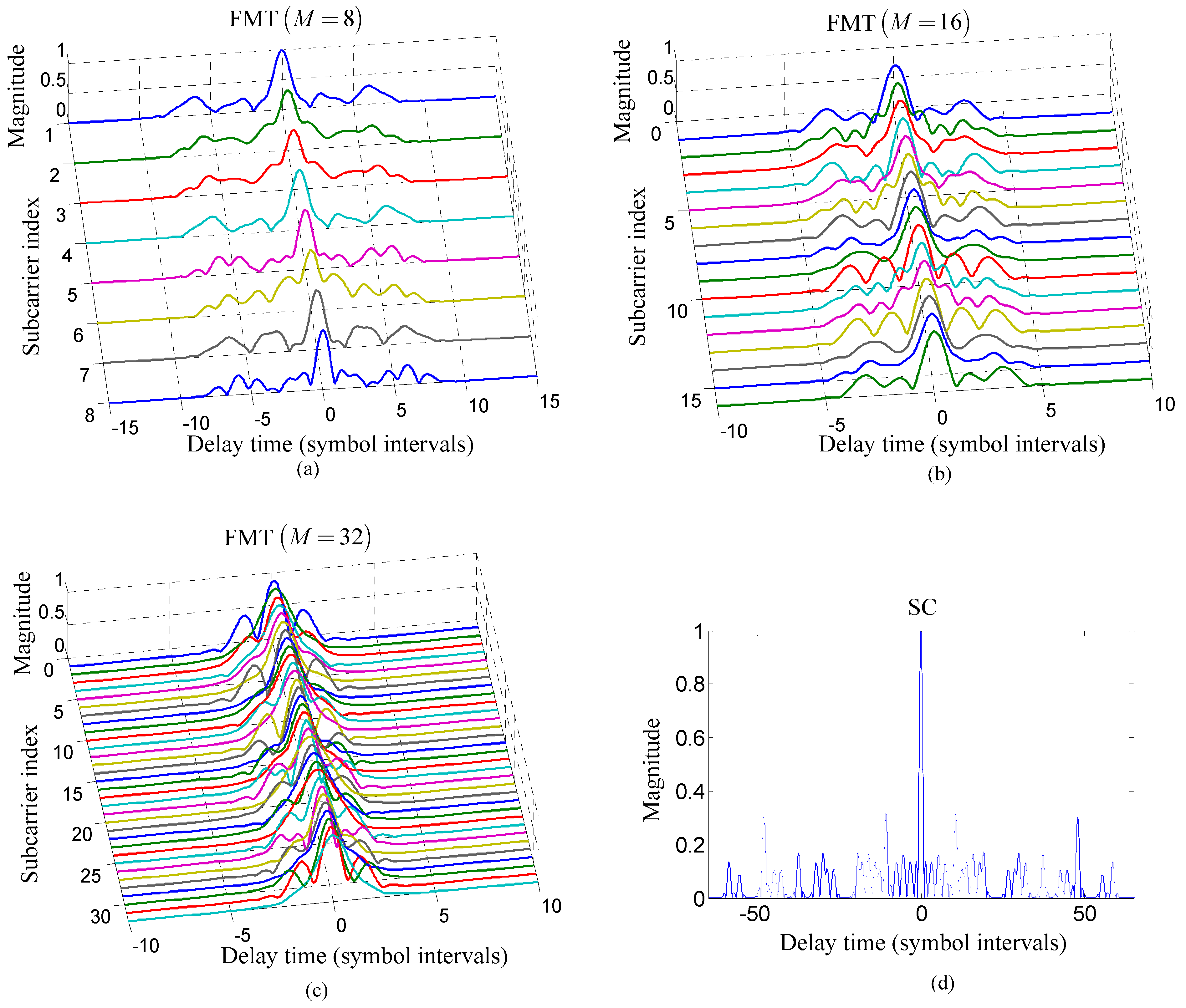
3.1.1. Channel Model
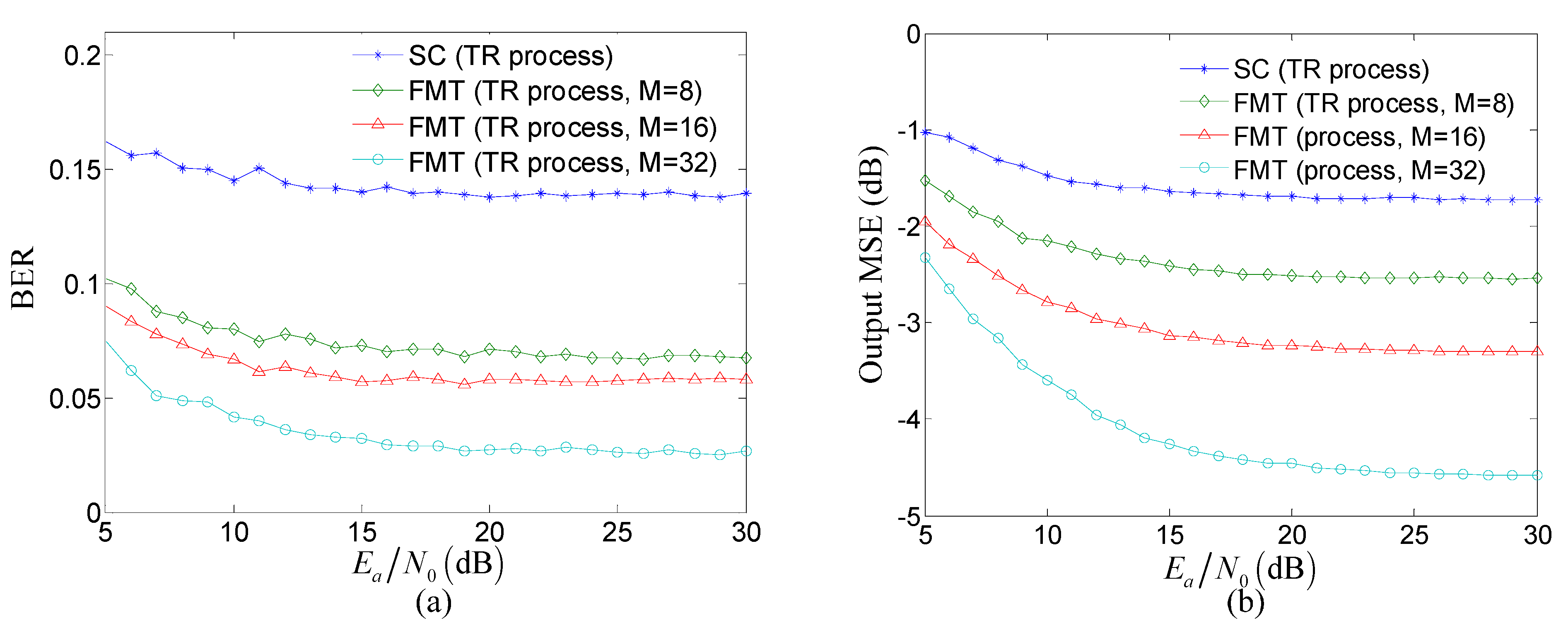
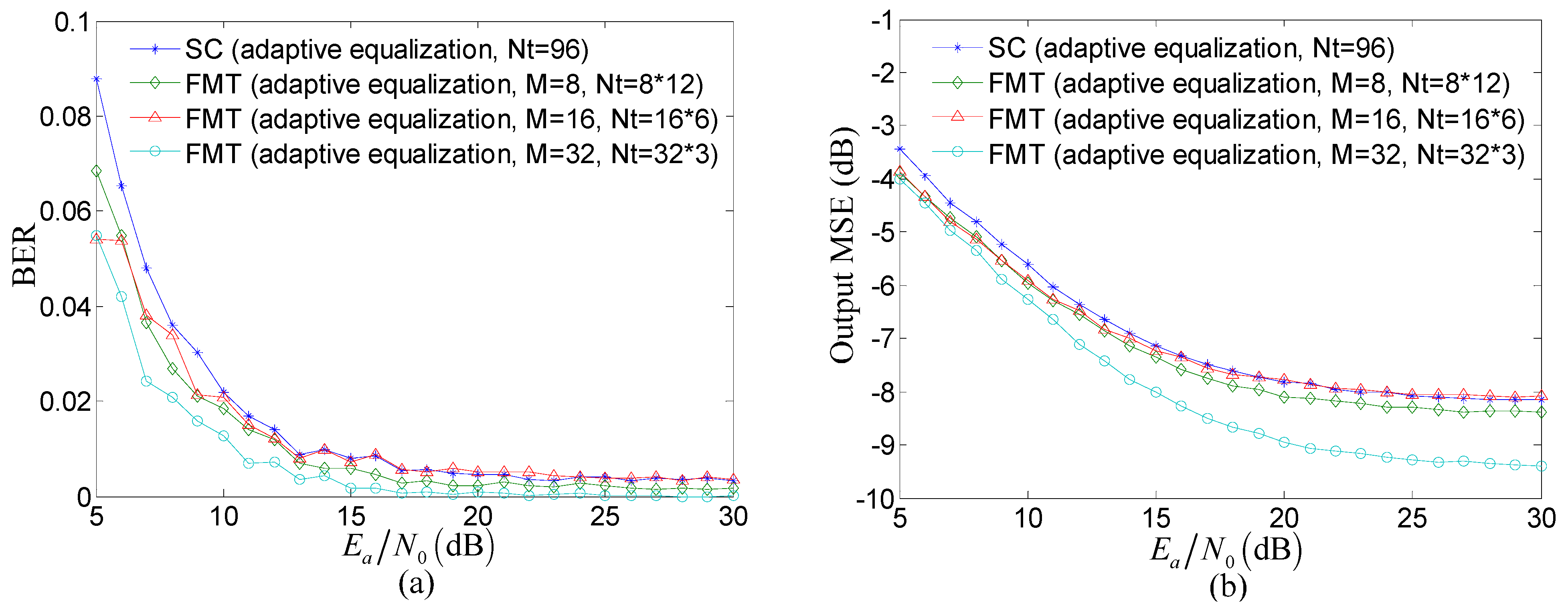
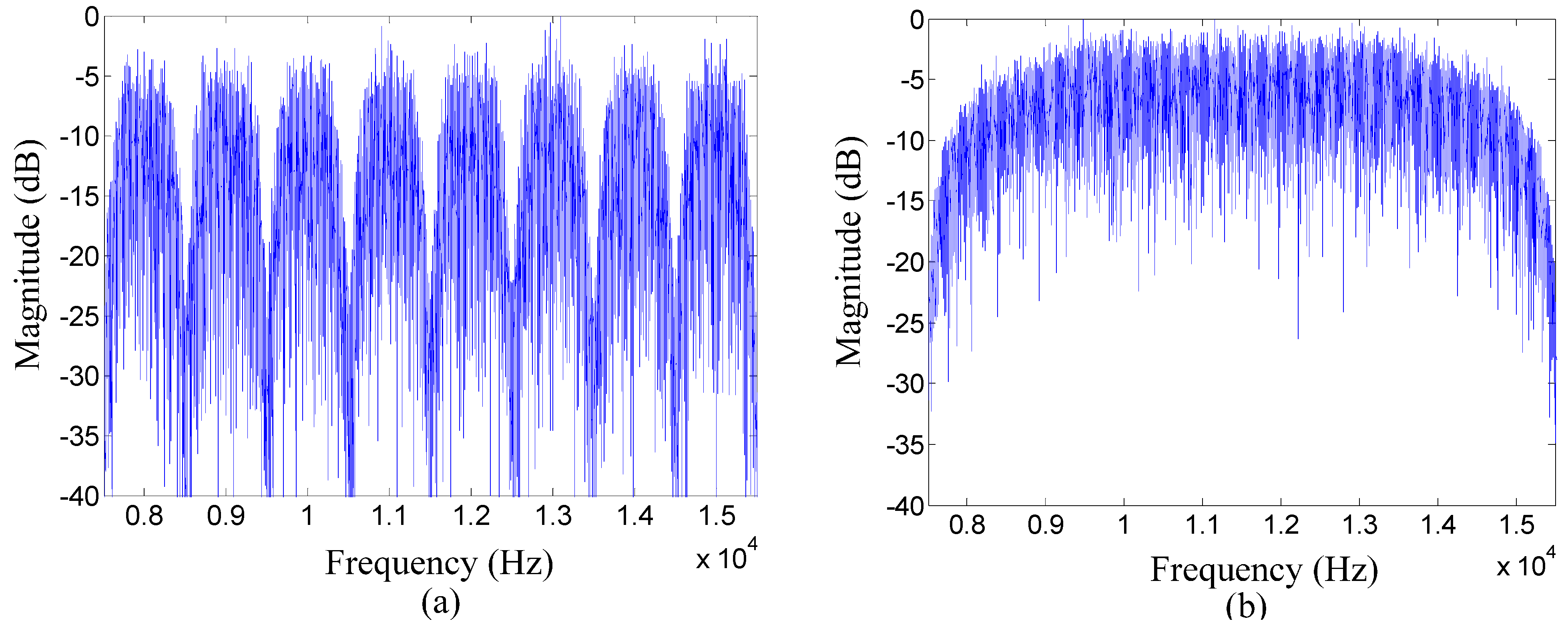
3.1.2. Simulation Results



3.2. Experiment
3.2.1. Experimental Setup

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | The Proposed Method | The TR Acoustic Communication Using SC Modulation |
|---|---|---|
| Communication frequency band | 7.5–15.5 kHz | 7.5–15.5 kHz |
| The number of subcarriers | 8 | 1 |
| Roll-off factor | 0.5 | 0.5 |
| Symbol interval | 1.5 ms | 0.1875 ms |
| Number of total symbols | 8 × 800 | 6400 |
| Number of training symbol | 8 × 100 | 800 |
| Number of equalizers | 8 | 1 |
| Total number of taps | 8 × 8 | 64 |
| Forgetting factor of RLS algorithm | 0.999 | 0.999 |
| Proportional tracking constant in DPLL | 0.1 | 0.1 |
| Integral tracking constant in DPLL | 0.002 | 0.002 |
| Constellation | BPSK | BPSK |

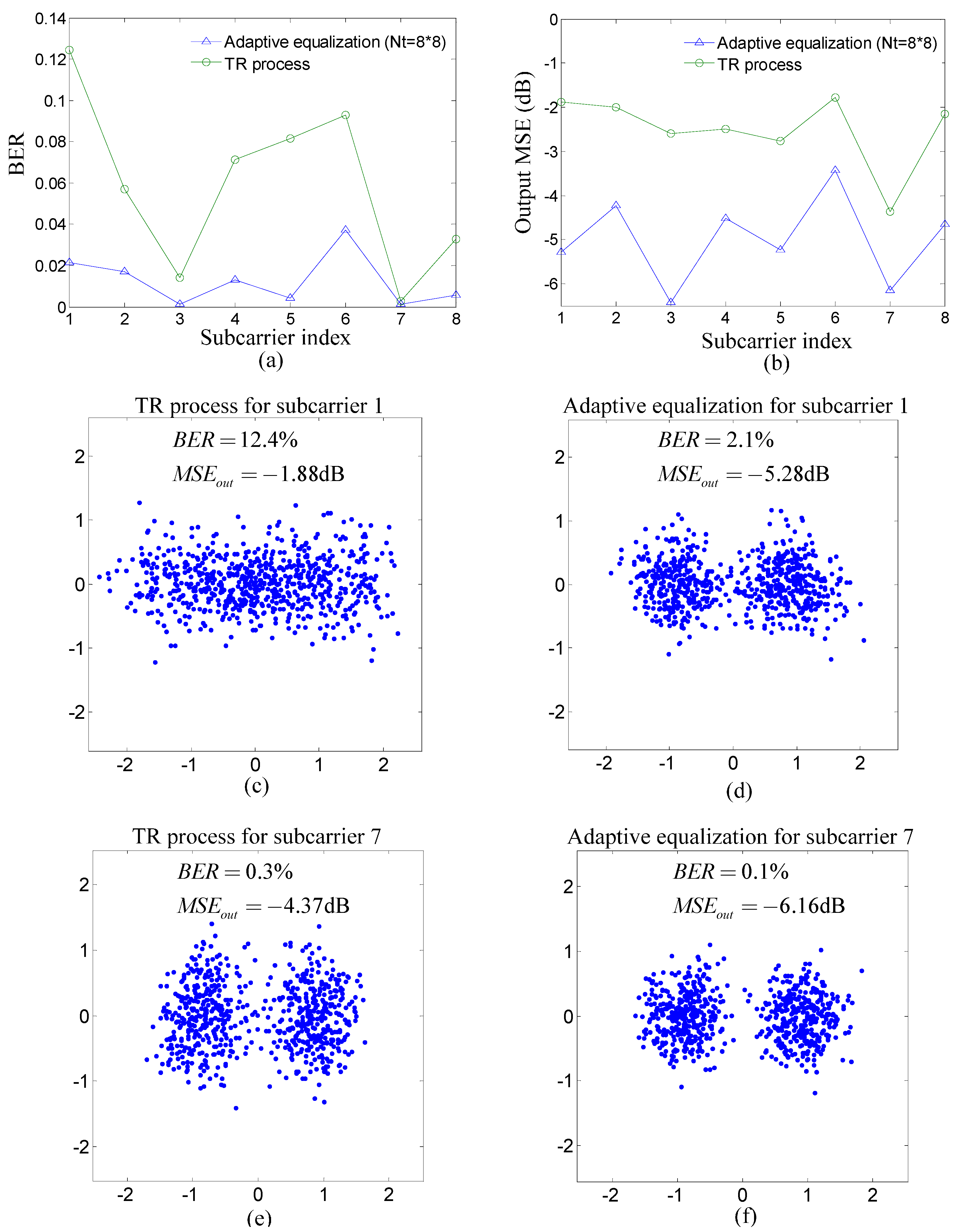
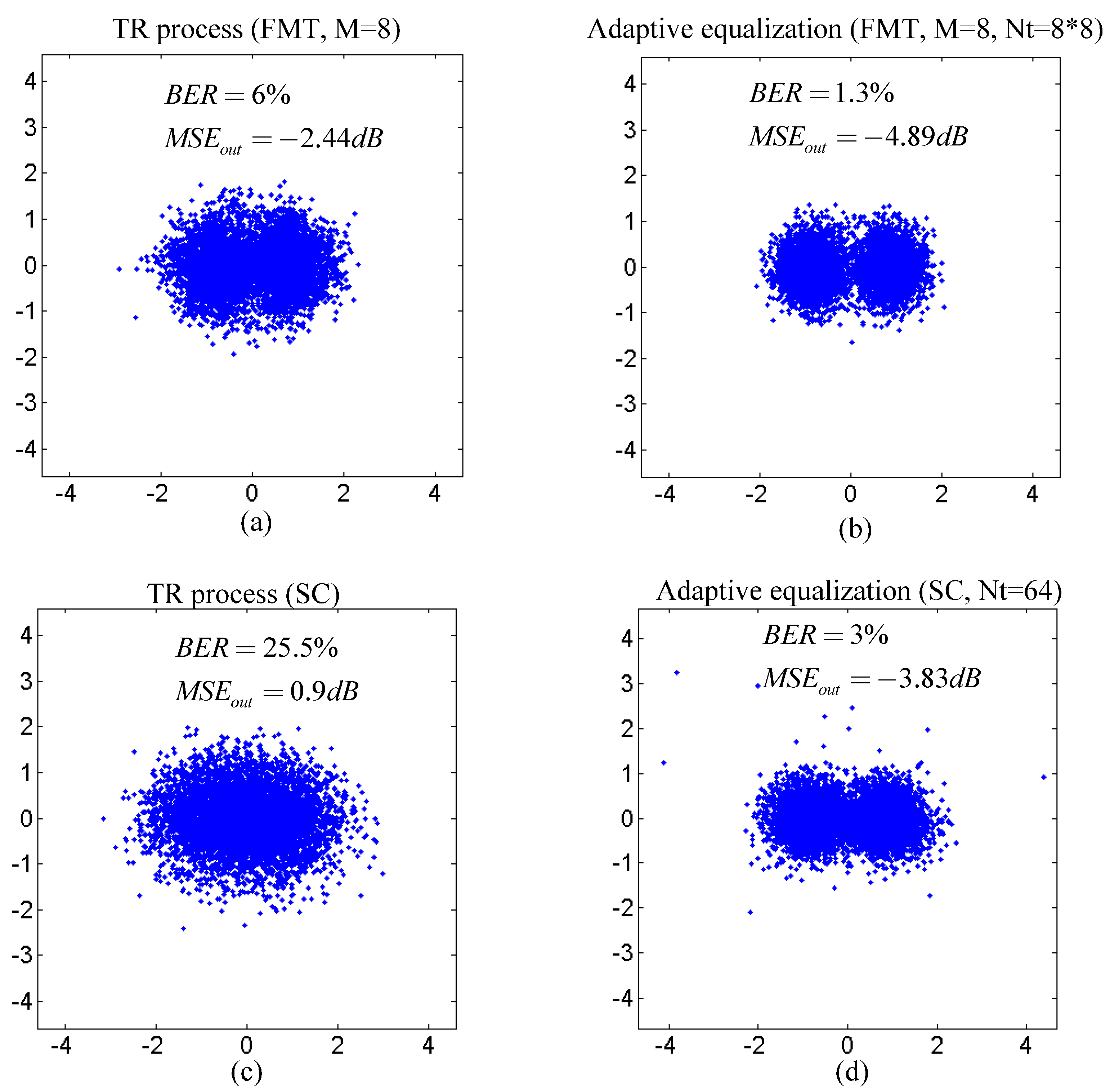
3.2.2. Experimental Results



4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Stojanovic, M. Retrofocusing techniques for high rate acoustic communications. J. Acoust. Soc. Am. 2005, 117, 1173–1185. [Google Scholar] [CrossRef]
- Song, H.C.; Kim, J.S.; Hodgkiss, W.S.; Kuperman, W.A. High-rate multiuser communications in shallow water. J. Acoust. Soc. Am. 2010, 128, 2920–2925. [Google Scholar] [CrossRef] [PubMed]
- Song, A.; Badiey, M.; McDonald, V.K.; Yang, T.C. Time reversal receivers for high data rate acoustic multiple-input–multiple-output communication. IEEE J. Ocean. Eng. 2013, 36, 525–538. [Google Scholar] [CrossRef]
- Banerjee, S.; Agrawal, M. A time reversal technique for minimizing equalizer complexity in high rate multi-antenna UWA link. In Proceedings of the IEEE National Conference on Communications (NCC), New Delhi, India, 15–17 February 2013; pp. 1–5.
- Sun, L.; Li, R.; Zhou, T. A research of time division multiplexed downlink communications using passive time reversal. J. Harbin Eng. Univ. 2013, 34, 312–318. (In Chinese) [Google Scholar]
- Sun, L.; Li, H.S.; Zhou, B.; Dong, Z.Q. Multiple-Input-Multiple-Output Acoustic Communications using Time-Reversal Space-Time Block Coding. J. Harbin Eng. Univ. 2015. accepted (In Chinese) [Google Scholar]
- Zhang, G.S.; Hovem, J.M.; Dong, H.F. Experimental assessment of different receiver structure for underwater acoustic communications over multipath channels. Sensors 2012, 12, 2118–2135. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gomes, J.; Victor, B. Time-reversed OFDM communication in underwater channels. In Proceedings of the IEEE 5th Workshop on Signal Processing Advances in Wireless Communications, Lisbon, Portugal, 11–14 July 2004; pp. 626–630.
- Gomes, J.; Silva, A.; Jesus, S. OFDM demodulation in underwater time-reversed shortened channels. In Proceedings of the 2008 Oceans, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–8.
- Gomes, J.; Berger, C.R.; Silva, A. Demodulation of underwater OFDM transmissions by time reversal and basis pursuit methods. In Proceedings of the 17th European Wireless Conference, Vienna, Austria, 27–29 April 2011; pp. 506–514.
- Liu, Z.Q.; Yang, T.C. Time reversal multicarrier communications over long multipath fading channels. In Proceedings of the IEEE Military Communications Conference, Orlando, FL, USA, 29 October–1 November 2012; pp. 1–6.
- Liu, Z.Q.; Yang, T.C. On the design of cyclic prefix length for time-reversed OFDM. IEEE Trans. Wirel. Commun. 2012, 11, 3723–3733. [Google Scholar] [CrossRef]
- Radosevic, A.; Ahmed, R.; Duman, T.M.; Proakis, J.G.; Stojanovic, M. Adaptive OFDM modulation for underwater acoustic communications: design considerations and experimental results. IEEE J. Ocean. Eng. 2014, 39, 357–370. [Google Scholar] [CrossRef]
- Liu, Z.Q.; Yang, T.C. On overhead reduction in time-reversed OFDM underwater acoustic communications. IEEE J. Ocean. Eng. 2014, 39, 788–800. [Google Scholar] [CrossRef]
- Wang, Y.L.; Ma, S.L.; Liang, G.L.; Fan, Z. Chirp spread spectrum of orthogonal frequency division multiplexing underwater acoustic communication system based on multi-path diversity receive. Acta Phys. Sin. 2014, 63, 1–8. (In Chinese) [Google Scholar]
- Wang, C.; Yin, J.W.; Huang, D.F.; Zielinski, A. Experimental demonstration of differential OFDM underwater acoustic communication with acoustic vector sensor. Appl. Acoust. 2015, 91, 1–5. [Google Scholar] [CrossRef]
- Zhang, G.S.; Dong, H.F. Experimental assessment of a multicarrier underwater acoustic communication system. Appl. Acoust. 2011, 72, 953–961. [Google Scholar] [CrossRef]
- Song, A.; Badiey, M. Time reversal acoustic communication for multiband transmission. JASA Express Lett. 2012, 131, EL283–EL288. [Google Scholar] [CrossRef] [PubMed]
- Song, A.; Badiey, M. Multiband transmissions for underwater acoustic communication. In Proceedings of the Meetings on Acoustics, Montreal, QC, Canada, 2–7 June 2013; pp. 1–4.
- Gomes, J.; Stojanovic, M. Performance Analysis of filtered multitone modulation systems for underwater communication. In Proceedings of the IEEE International Conference on Oceans, Biloxi, MS, USA, 26–29 October 2009; pp. 1–5.
- Li, B.; Zhou, S.; Stojanovic, M.; Freitag, L.; Willett, P. Multicarrier communication over underwater acoustic channels with nonuniform doppler shifts. IEEE J. Ocean. Eng. 2008, 33, 198–209. [Google Scholar]
- Hwang, S.J.; Schniter, P. Efficient multicarrier communication for highly spread underwater acoustic channels. IEEE J. Sel. Areas Commun. 2008, 26, 1674–1683. [Google Scholar] [CrossRef]
- Li, B.S.; Huang, J.; Zhou, S.L.; Ball, K.; Stojanovic, M.; Freitag, L.; Willett, P. MIMO-OFDM for high-rate underwater acoustic communications. IEEE J. Ocean. Eng. 2009, 34, 634–644. [Google Scholar]
- Zhao, Y.; Haggman, S.G. Intercarrier interference self-cancellation scheme for OFDM mobile communication systems. IEEE Trans. Commun. 2001, 49, 1185–1191. [Google Scholar] [CrossRef]
- Salberg, A.B.; Swami, A. Doppler and frequency-offset synchronization in wideband OFDM. IEEE Trans. Wirel. Commun. 2005, 4, 2870–2881. [Google Scholar] [CrossRef]
- Tu, K.; Fertonani, D.; Duman, T.M.; Stojanovic, M.; Proakis, J.G.; Hursky, P. Mitigation of intercarrier interference for OFDM over time-varying underwater acoustic channels. IEEE J. Ocean. Eng. 2011, 36, 156–171. [Google Scholar] [CrossRef]
- Tonello, A.M. Performance limits for filtered multitone modulation in fading channels. IEEE Trans. Wirel. Commun. 2005, 4, 2121–2135. [Google Scholar] [CrossRef]
- Borna, B.; Davidson, T.N. Efficient design of FMT systems. IEEE Trans. Commun. 2006, 54, 794–797. [Google Scholar]
- Wang, T.; Proakis, J.G.; Zeidler, J.R. Interference analysis of filtered multitone modulation over time-varying frequency- selective fading channels. IEEE Trans. Commun. 2007, 55, 717–727. [Google Scholar]
- Fusco, T.; Petrella, A.; Tanda, M. Blind CFO estimation for noncritically sampled FMT systems. IEEE Trans. Sign. Process. 2008, 56, 2603–2608. [Google Scholar] [CrossRef]
- Amini, P.; Chen, R.R.; Farhang-Boroujeny, B. Filterbank multicarrier communications for underwater acoustic channels. IEEE J. Ocean. Eng. 2015, 40, 115–130. [Google Scholar] [CrossRef]
- Yu, H.F.; Kim, W.; Chang, K. A study of multicarrier modulation methods for underwater acoustic communications. In Proceedings of the IEEE International Conference on ICT Convergence, Busan, Korea, 22–24 December 2014; pp. 747–748.
- Wilbur, M.R.; Davidson, T.N.; Reilly, J.P. Efficient design of oversampled NPR GDFT filterbanks. IEEE Trans. Sign. Process. 2003, 52, 1947–1963. [Google Scholar] [CrossRef]
- Stojanovic, M.; Prejsig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Stojanovic, M.; Catipovic, J.; Proakis, J.G. Adaptive multichannel combining and equalization for underwater acoustic communications. J. Acoust. Soc. Am. 1993, 94, 1621–1631. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Chen, B.; Li, H.; Zhou, T.; Li, R. Time Reversal Acoustic Communication Using Filtered Multitone Modulation. Sensors 2015, 15, 23554-23571. https://doi.org/10.3390/s150923554
Sun L, Chen B, Li H, Zhou T, Li R. Time Reversal Acoustic Communication Using Filtered Multitone Modulation. Sensors. 2015; 15(9):23554-23571. https://doi.org/10.3390/s150923554
Chicago/Turabian StyleSun, Lin, Baowei Chen, Haisen Li, Tian Zhou, and Ruo Li. 2015. "Time Reversal Acoustic Communication Using Filtered Multitone Modulation" Sensors 15, no. 9: 23554-23571. https://doi.org/10.3390/s150923554
APA StyleSun, L., Chen, B., Li, H., Zhou, T., & Li, R. (2015). Time Reversal Acoustic Communication Using Filtered Multitone Modulation. Sensors, 15(9), 23554-23571. https://doi.org/10.3390/s150923554