1. Introduction
The lower-limb exoskeleton, as a mechanical device that is designed around the shape and the function of the human body and can be worn by the operator [
1,
2], is widely used for the disabled and elderly people for power-assisted walking or for normal people for load-carrying [
3,
4]. As a strong coupled humachine system, the walking gait of the lower-limb exoskeleton robot is highly consistent with the human’s [
5]. In human walking, the lower-limb joints have similar motion in the same gait phase [
6,
7]. The walking performance of the exoskeleton is mainly determined by the following three aspects: gait trajectory generation, gait execution and gait assessment [
3,
8,
9], which are all related to gait phases. For example, (1) especially in rehabilitation, the exoskeleton walking gait trajectory is usually generated by a motion model or algorithm based on gait phases [
10,
11]. (2) Due to the similarity of the motion parameters in the same gait phase, many control strategies of the exoskeleton are developed based on gait phases [
12,
13]. (3) Extracting the gait phase features and making the segmental gait evaluation are general gait analysis methods [
14]. Therefore, accurate gait phase recognition is critical to the lower-limb exoskeleton.
Gait phase is initially described in clinical gait analysis, together with other walking parameters, to diagnose pathological gaits or to evaluate walking after rehabilitation [
15]. Human walking is a repetitive lower-limb movement [
12]. One gait cycle mainly consists of two states with one leg referenced, the stance phase and the swing phase, and also two states with both legs referenced, single stance and double stances. Each phase is composed of different sub-phases. At present, the mainstream terminology of Rancho Los Amigos (RLA) [
16,
17] is in use, which has become increasingly popular since the late 1980s. It describes the gait with one leg referenced and includes the stance phase and swing phase. The stance phase consists of the following sub-phases: initial contact, loading response, mid-stance, terminal stance and pre-swing. The swing phase consists of the following sub-phases: initial swing, mid-swing, and terminal swing. This is also a typical classification method [
18]. So far, several partitioning models, with different levels of granularity, have been proposed depending on the different clinical aims [
19].
In the field of exoskeleton robots, one walking cycle is usually further categorized into multiple phases. S. Oh [
20] thought that a single control method is not the best option for all of the motion phases during the gait cycle. H. Kazerooni [
21] adopted a hybrid control strategy for different gait phases to control the Berkeley Lower Extremity Exoskeleton (BLEEX). In [
21], the walking gait cycle was divided into stance phase and swing phase. Correspondingly, two controllers were developed, which included a position controller used for the stance leg and sensitivity amplification control used for the swing leg. To facilitate the recovery of walking following stroke, S. A. Murray [
22] proposed an assistive approach without dictating the spatiotemporal nature of joint movement for the lower-limb exoskeleton. A finite state machine consisting of six gait phase states was used to govern the exoskeleton controller.
In addition to the control of the exoskeleton, the gait phase information is also widely used in gait generation and evaluation. To generate the limb trajectory of the gait robotic trainer, P. Wang [
11] marked five gait phase events for one side in one walking cycle. Based on these gait phase events, in total, ten key points were picked up for one gait cycle. T. T. Huu [
23] quantified the walking parameters during each gait phase to evaluate the fuzzy-based control strategy on a powered lower-limb exoskeleton. To assess the foot trajectory, Y. Qi [
24] adopted the wireless ultrasonic sensor network to detect the human gait phase and to obtain the accurate estimates for the gait cycle, stance phase, swing phase and other gait events.
Seeing the wide application of the gait phase information of the lower-limb exoskeleton, accurate gait phase recognition is the priority among exoskeleton technologies. J. Jung [
25] proposed a neural network-based gait phase classification method using sensors equipped on the lower-limb exoskeleton. The classifiers used the orientation of each lower-limb segment and the angular velocities of the joints to output the current gait phase, which was the stance phase or swing phase. In [
26], eight different gait phases were separated by using electromyographic (EMG) signal data of the lower-limb to drive foot-knee exoskeleton orthosis. I. Pappas [
27] presented a reliable gait phase detection system, which can detect in real time the following gait phases: stance, heel-off, swing and heel-strike. The system employed a gyroscope to measure the angular velocity of the foot and three force-sensitive resistors to assess the forces exerted by the foot on the shoe sole during walking. S. Mohammed [
28] adopted an in-shoe pressure mapping system to identify the gait phases. The expectation maximization (EM) algorithm and hidden Markov model (HMM) model are used for dividing one gait cycle into six sub-phases. The work in [
29,
30] focused on the gait partitioning by means of gyroscope data in order to implement a control system for a pediatric exoskeleton. They introduced a novel algorithm based on a hierarchical weighted decision on the output of two or more scalar HMMs to estimate the most likely sequence of four gait phases. In [
31], a gait phase detection algorithm based on HMM, which used data from foot-mounted single-axis gyroscopes, can generate equivalent results as a reference signal provided by force-sensitive resistors (FSRs) for typically developing children and children with hemiplegia. A hybrid method based on a feed-forward neural network (FNN) embedded in an HMM was introduced in [
32] for detecting five gait phases. The work in [
33] has shown higher performance for HMM than support vector machine (SVM), Gaussian mixture model (GMM) and linear discriminant analysis (LDA) in motion recognition.Therefore, the HMM has a strong ability in modeling the time series action compared to other machine learning methods. However, the neural networks method is good at classifying the actions by the spatial data. The work in [
34] proposed that the synchronization between the robots of a team was achieved by exploiting the paradigm of mirror neurons.
In addition, some external assistive approaches for classifying the gait phases are adopted. The paper [
35] adopted Phtron FASTCAM Viewer software (FASTCAM-ultima 1024, Photron, Tokyo, Japan) to analyze all video images frame by frame by two research staff members and divided all gait cycles into eight sub-phases independently. In fact, this work took two staff member two months’ time. In [
24], three force plates were used to acquire ground reaction forces while walking. The robot data and the ground reaction forces are combined to classify the gait phases. This method is effective, but the hardware cost is higher.
Based on the existing research results, we can get that the gait phase recognition generally used single-type sensors or a combination of multiple types of sensors [
18], such as angular velocity, attitude, force, electromyography (EMG), IMU, camera, and so on [
24,
25,
26,
27,
28,
30,
36,
37,
38]. However, for a lower-limb exoskeleton system, as few as possible sensors should be used to achieve the control goal, which can simplify the sensory system and enhance the stability of the exoskeleton. The above sensors used in existing methods have to be additionally installed on the exoskeleton or human, which increase the complexity of the sensory system.
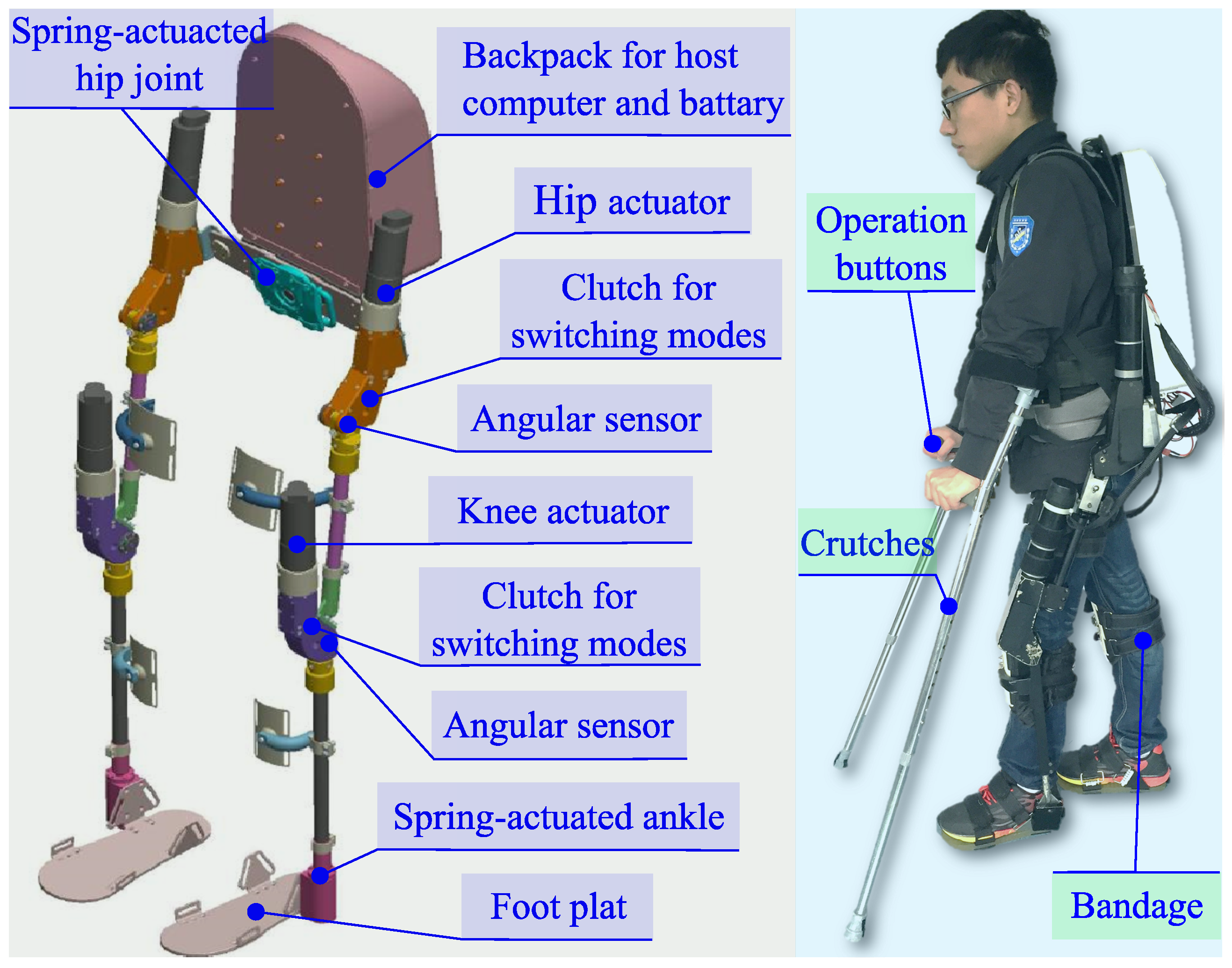
Angular sensors, which are essential for joint closed-loop controlling [
39], are usually installed on the joints of the lower-limb exoskeleton. However, other types of sensors, such as force sensors, plantar pressure sensors, attitude sensors or ultrasonic sensors, need to be installed additionally. Actually, the angular sensors of joints already contain the position, velocity, acceleration and other motion information of the exoskeleton robot. Therefore, the detailed gait phases can be recognized accurately using only joint angular sensors based on a reasonable method. However, the derivations of joint rotation velocity and acceleration are definitely affected by accumulated errors from the noise level.
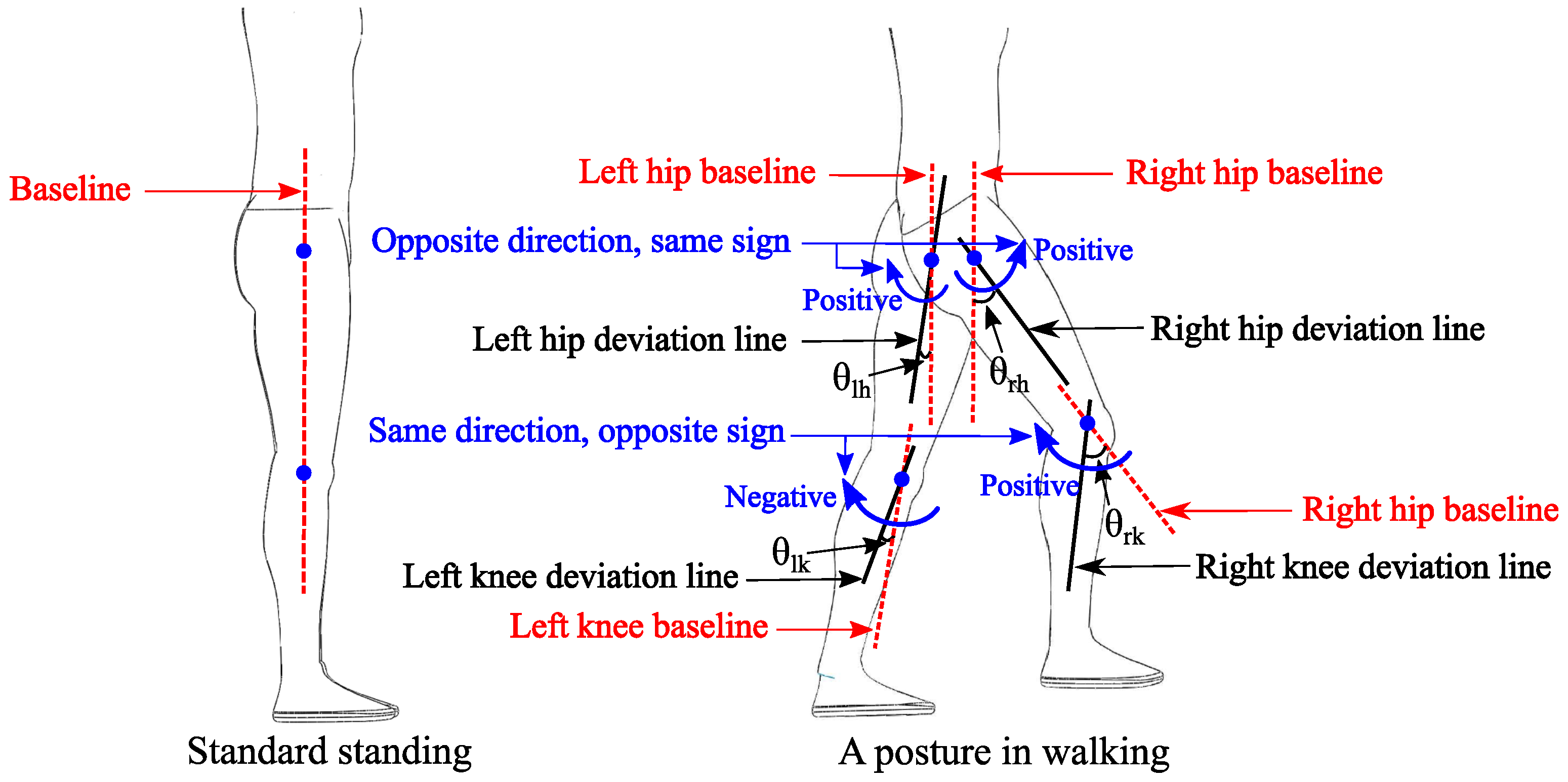
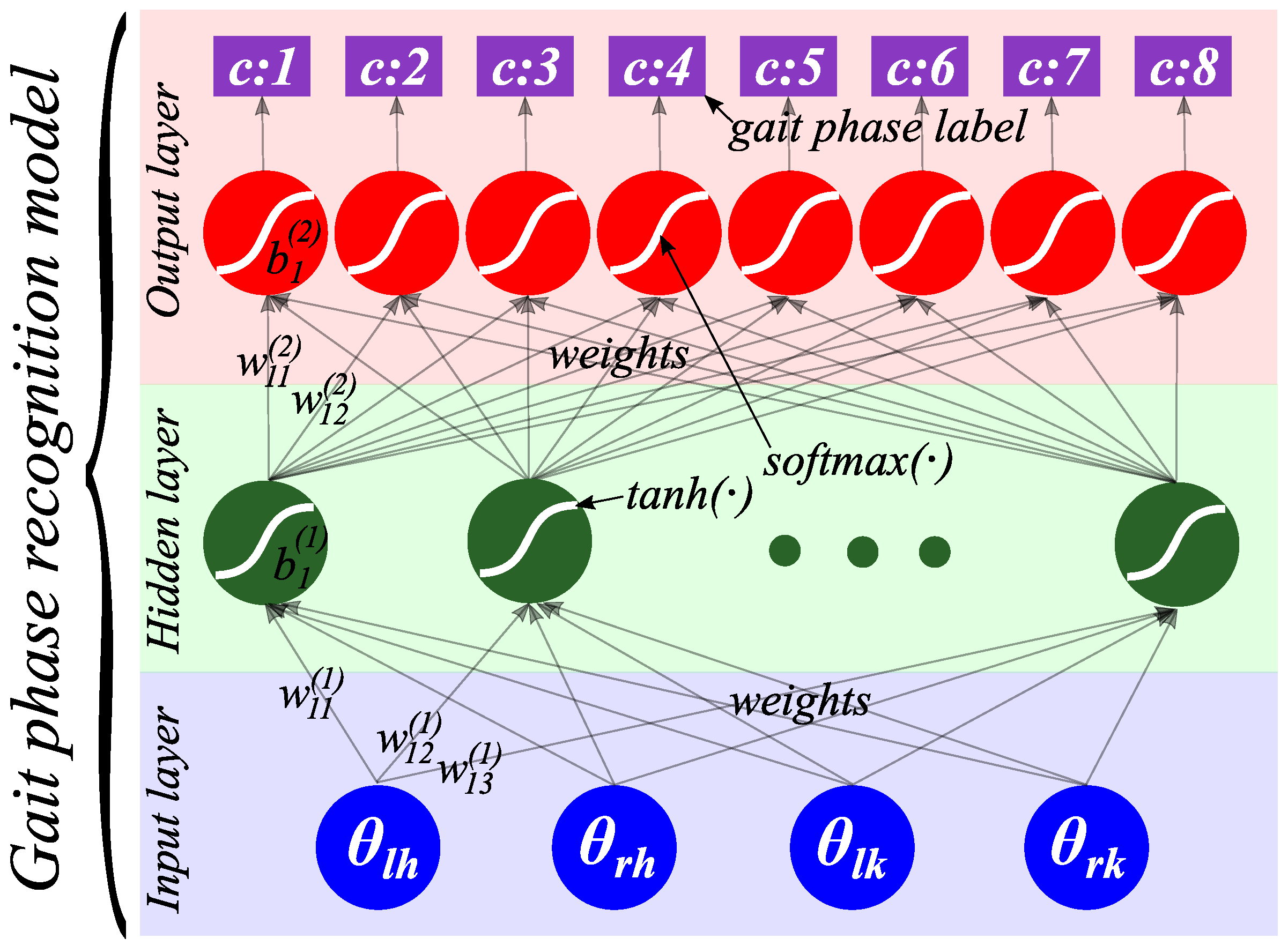
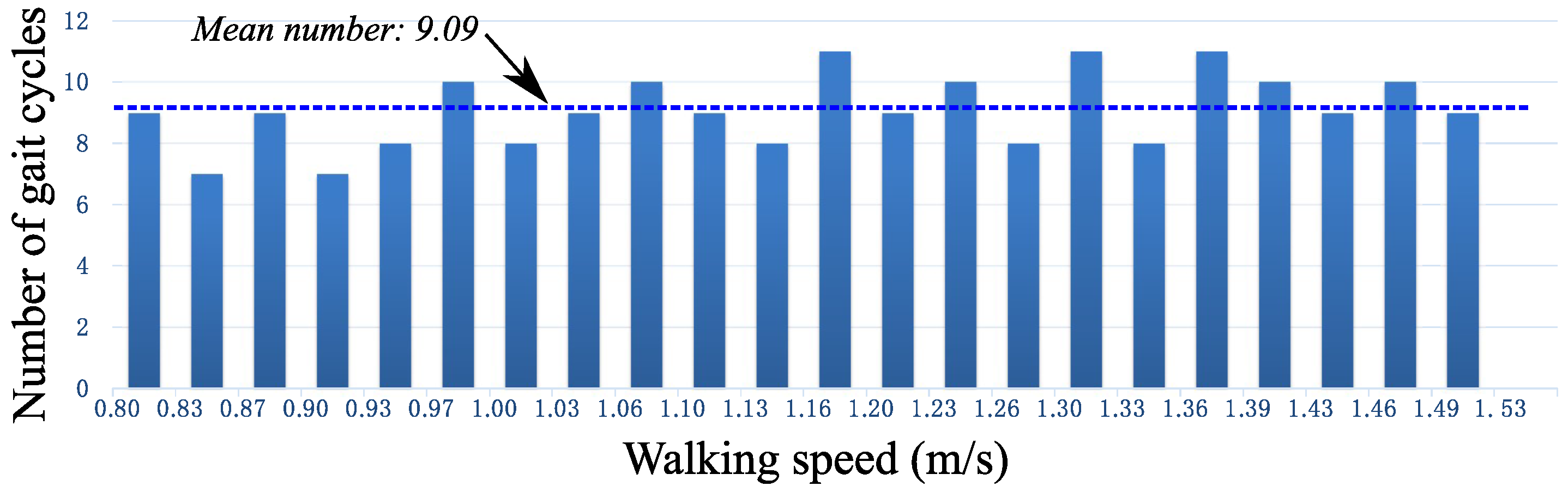
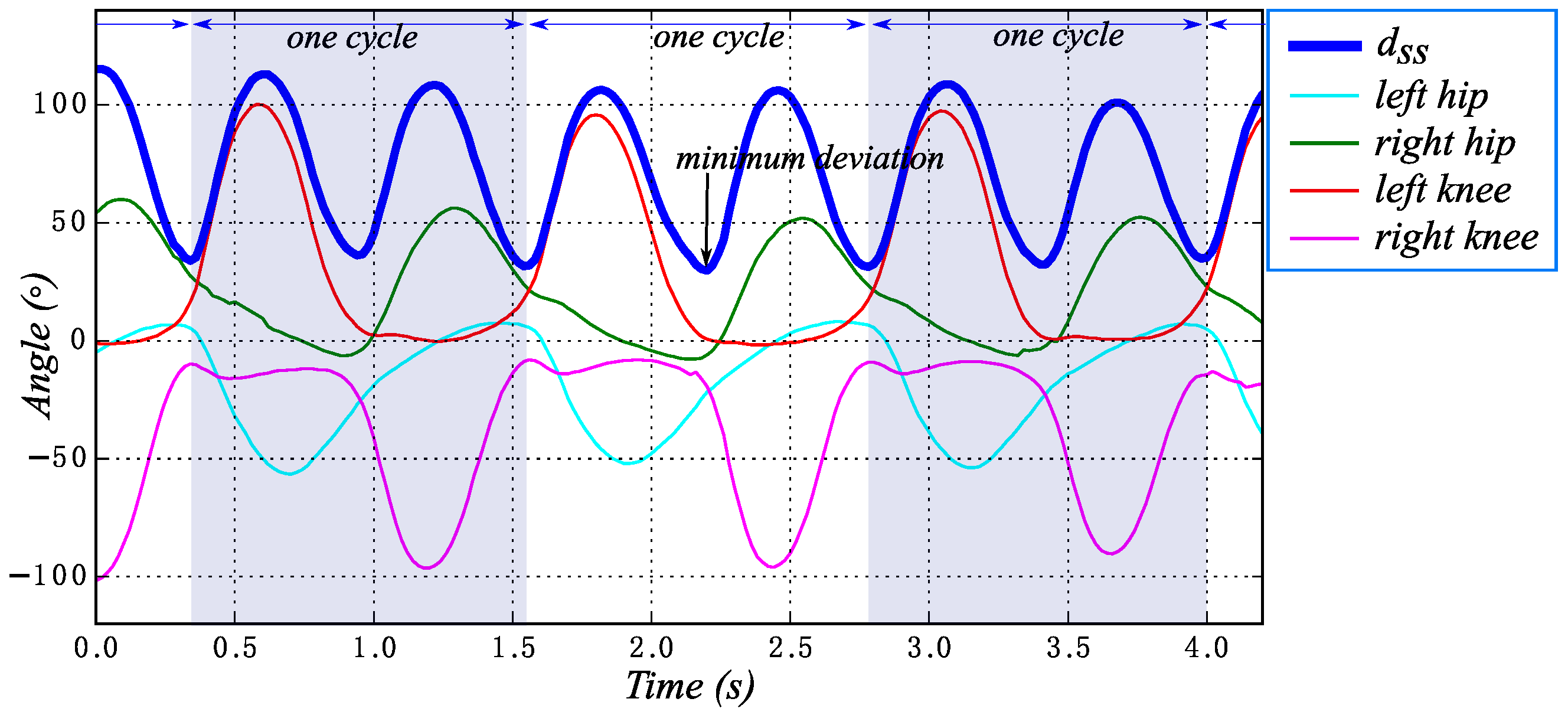
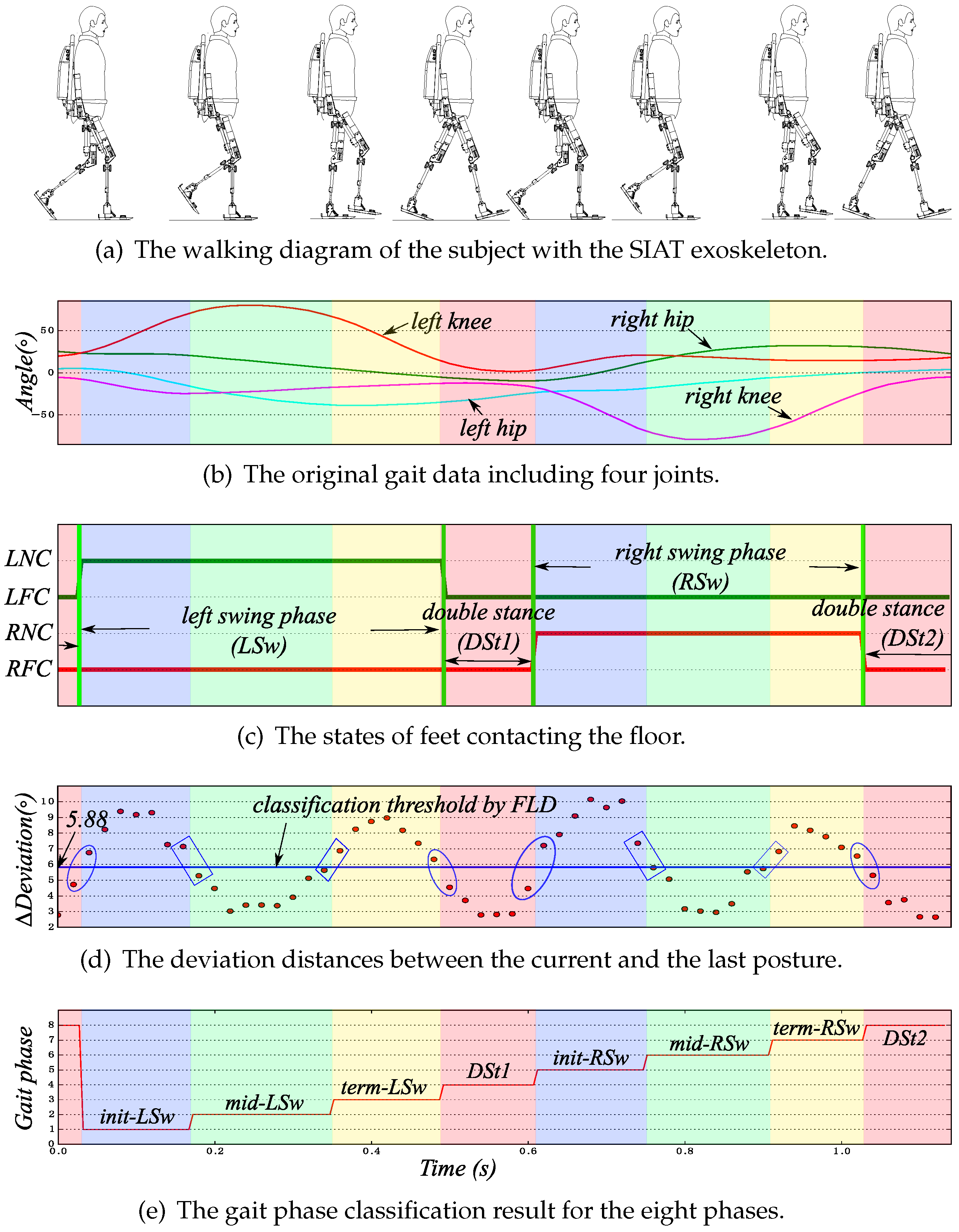
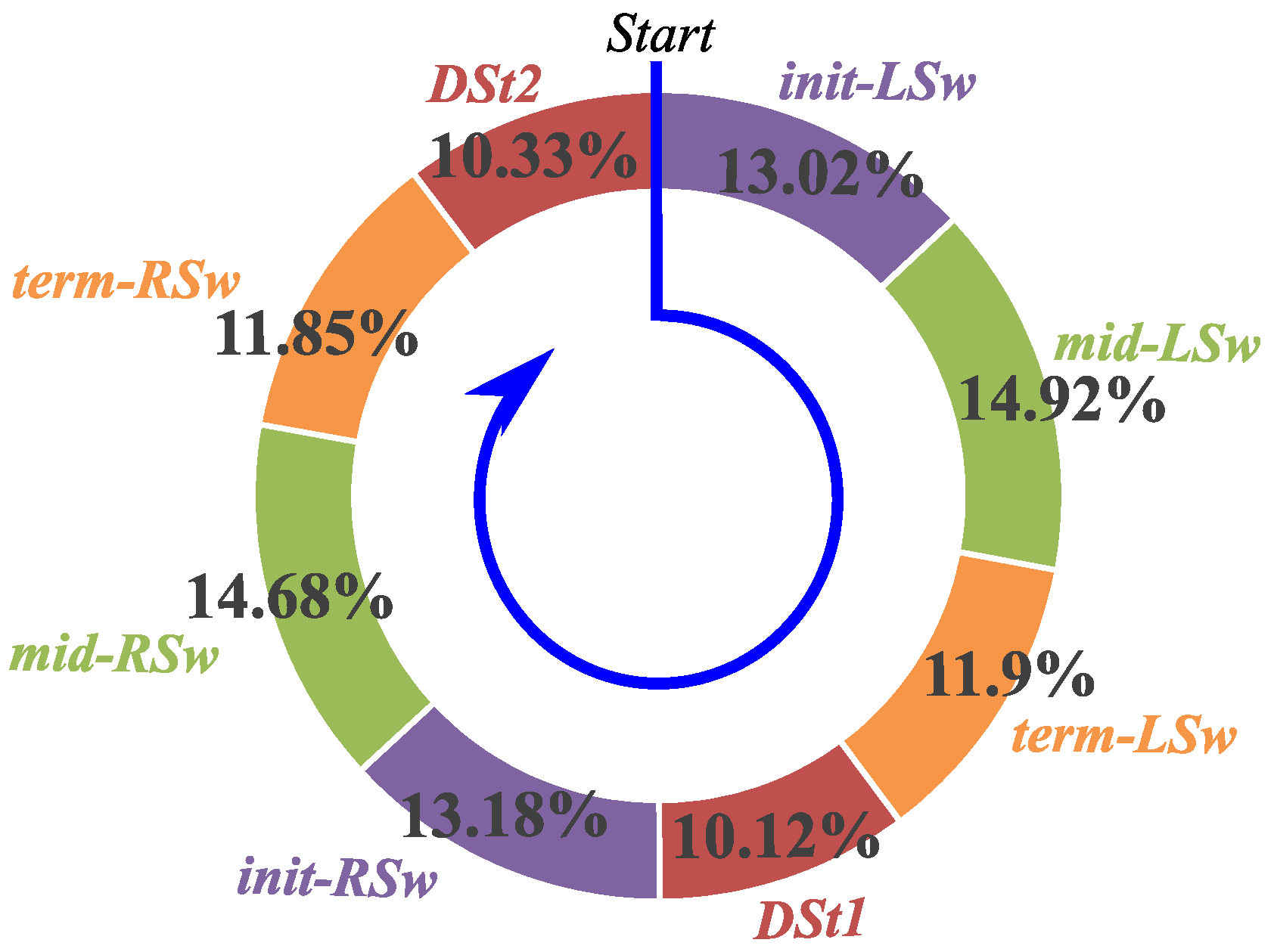
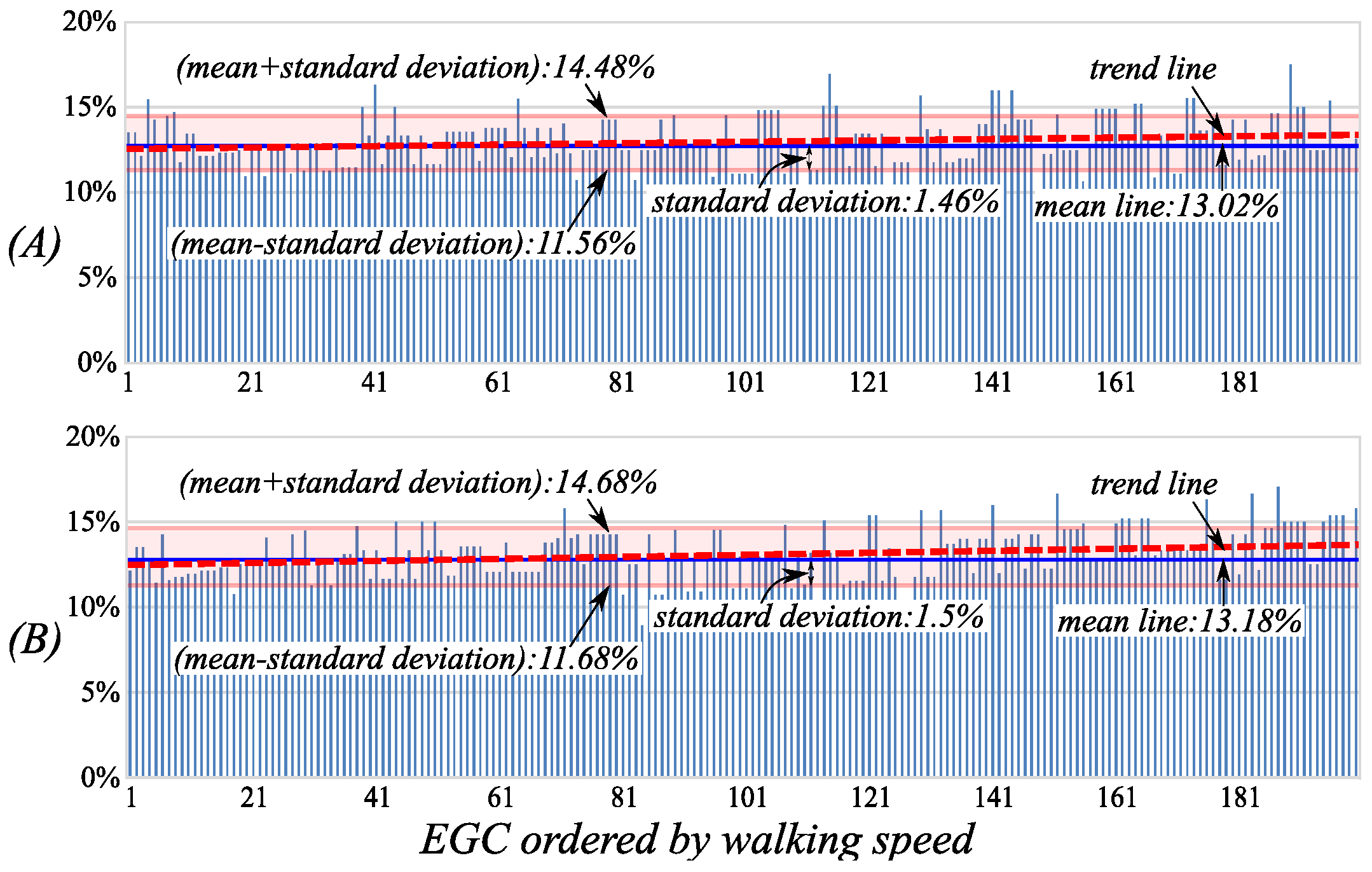
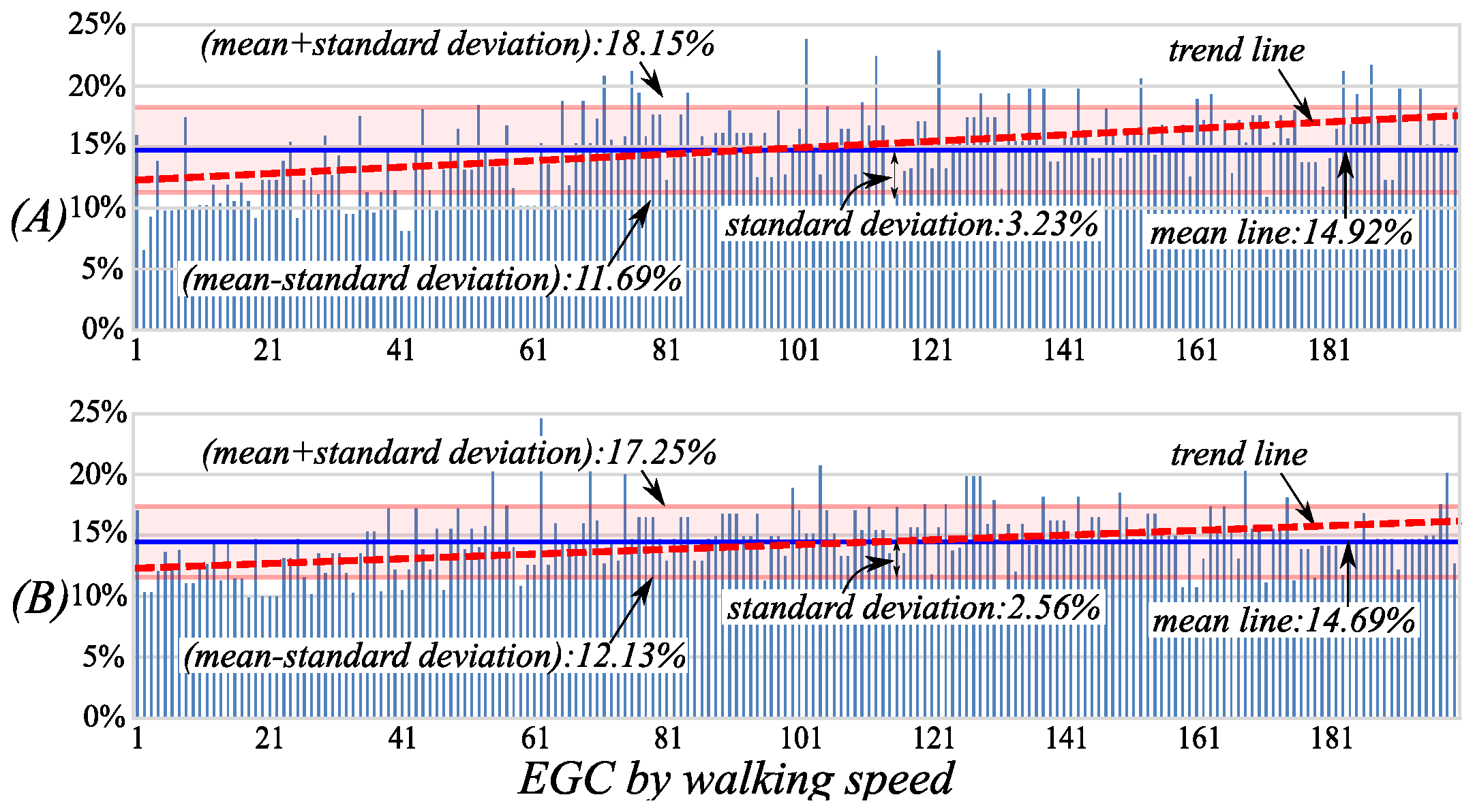
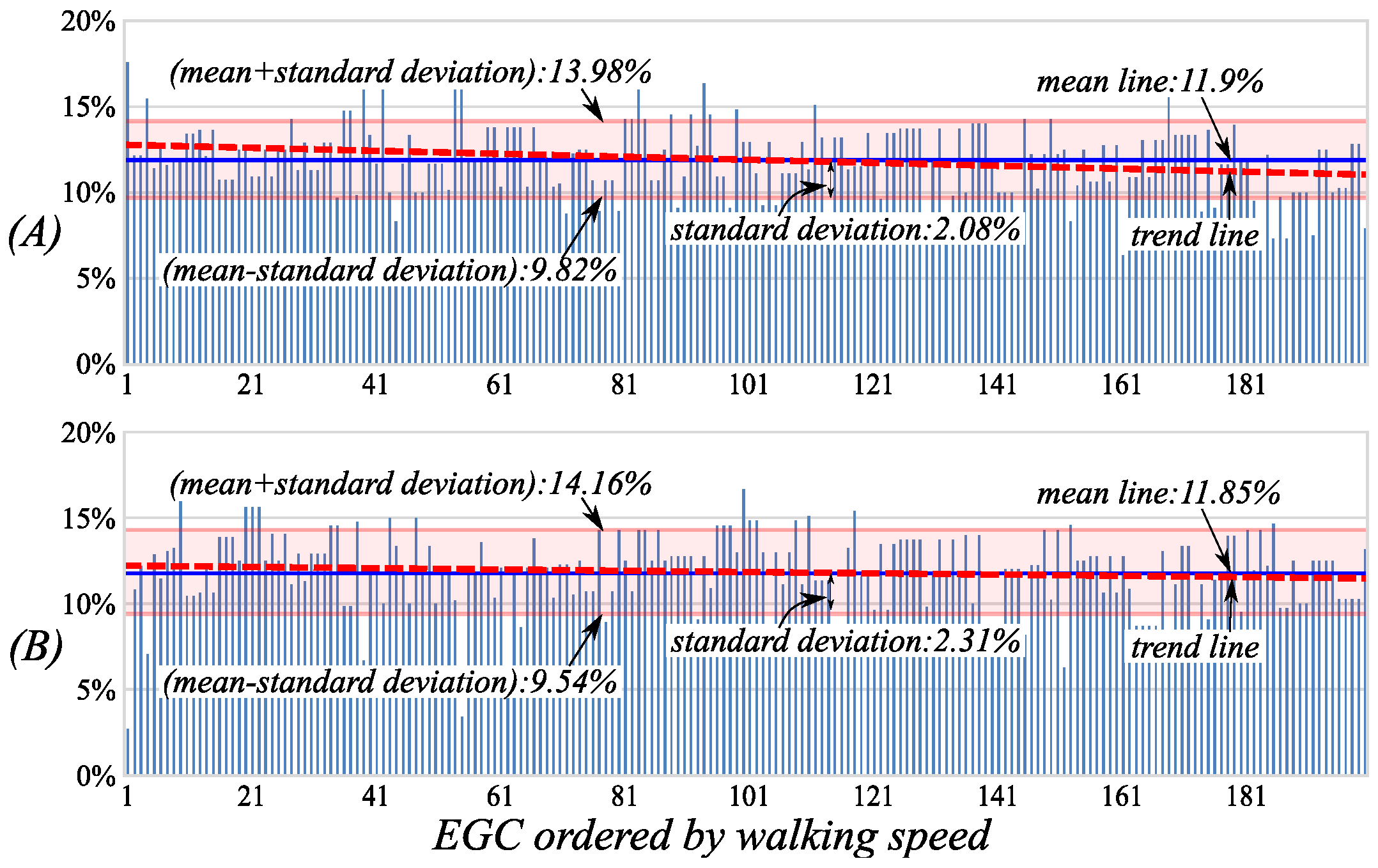
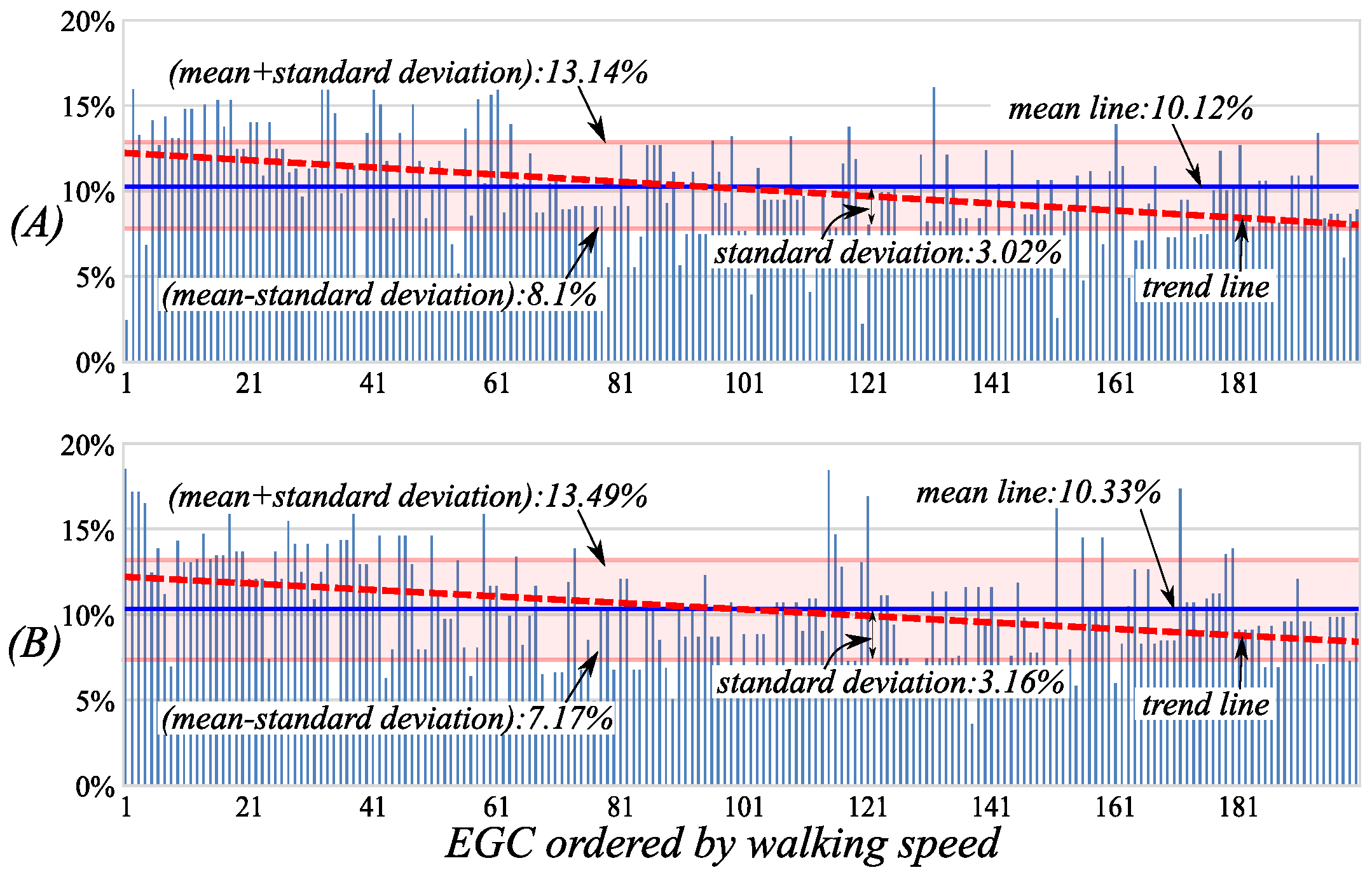
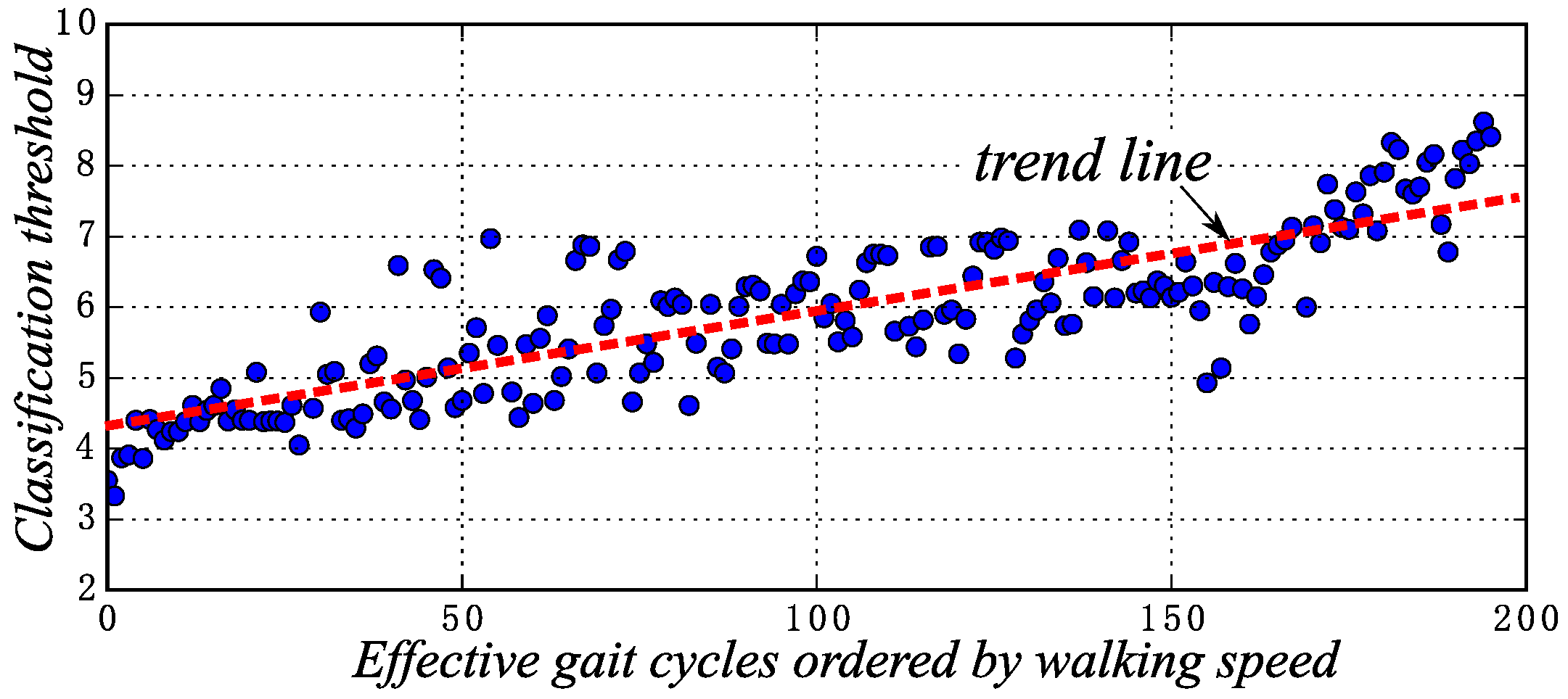
In this paper, we propose a novel gait phase recognition method using only joint angular sensors of the lower-limb exoskeleton. In order to avoid deriving the velocity and acceleration from joint angles, we define a “posture deviation” to represent the “motion”, and then, the posture deviation is used for representing the gait phase features. The method consists of two procedures. Firstly, according to the gait data characteristics, one gait cycle is divided into eight phases by Fisher’s linear discrimination method. To verify the rationality, the effective statistical analysis of the classification results during different walking speeds is also presented. Secondly, the gait phase recognition model based on multilayer perceptron (MLP) neural networks is built and trained by the gait phase-labeled gait set. The experimental results demonstrate that the gait phase recognition model can accurately predict the gait phase label for the lower-limb exoskeleton gait. Therefore, the proposed method can make full use of the potential functions of angular sensors, which are essential for joint closed-loop controlling, to recognize the gait phase. The novel method avoids installing additional sensors on the exoskeleton or human body and simplifies the sensory system of the wearable exoskeleton.
4. Conclusions
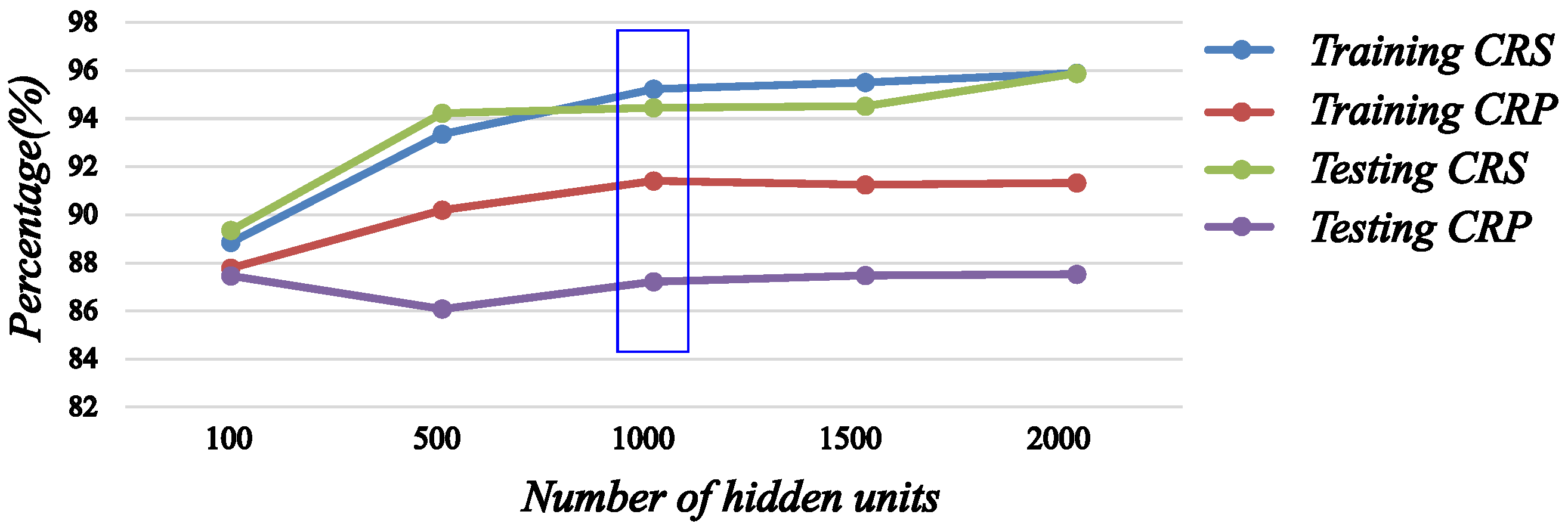
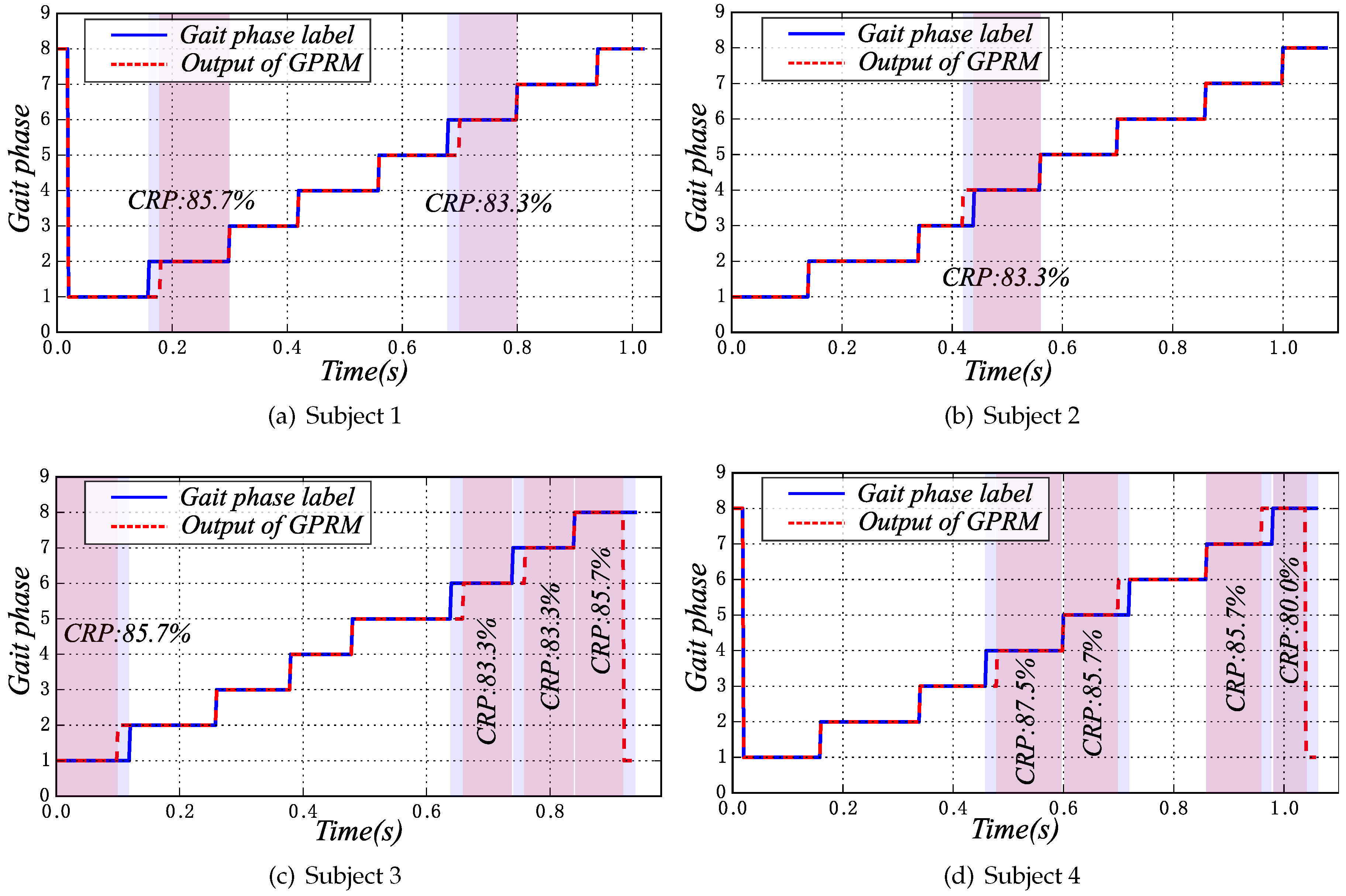
The gait phase recognition for lower-limb exoskeletons has become a hot research topic due to its extensive application. So far, many approaches to identify the gait phase have been developed; however, additional sensors that the existing methods use need to be installed, such as plantar pressure, attitude or IMU sensors. To make full use of the existing joint angular sensors, which are essential for closed-loop controlling, we proposed a novel gait phase recognition method using only lower-limb joint angular sensors. According to the characteristics of the gait data, we redefined the eight gait phases, which are referenced by the swing legs. To extract the gait phase features, the deviation distances are calculated and classified by Fisher’s linear discriminant method. Then, the gait phase labels of the gait set are obtained. By offline gait data classification, one gait cycle can be correctly divided into eight phases. To verify the rationality of the novel method, the relationships between the length of each gait phase and the walking speed are also analyzed. With the gait phase-labeled data, we build a gait phase recognition model based on the multilayer perceptron neural network. By training the model with a four-dimensional input vector and an eight-dimensional output vector, we can recognize in real time the gait phase through the four lower-limb joint angular data. For the testing set, the model has 94.45% of CRS and 87.22% of CRP. The experimental results demonstrate the effectiveness of the gait phase recognition. The novel method also simplifies the sensory system of the lower-limb exoskeleton.
Above, some research findings have been obtained. However, the CRS and CRP are relatively lower, because of the lesser amount of sampling points. Therefore, in the next work, we will increase the sampling frequency and decrease the gait phase classification and recognition error. Moreover, in future work, we intend to improve the existing control strategy of the lower-limb exoskeleton by the novel gait phase recognition method and to develop the gait trajectory evaluation method for the rehabilitation exoskeleton.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}