
Classification of Anticipatory Signals for Grasp and Release from Surface Electromyography


Abstract
:1. Introduction
2. Materials and Methods
2.1. Data Collection
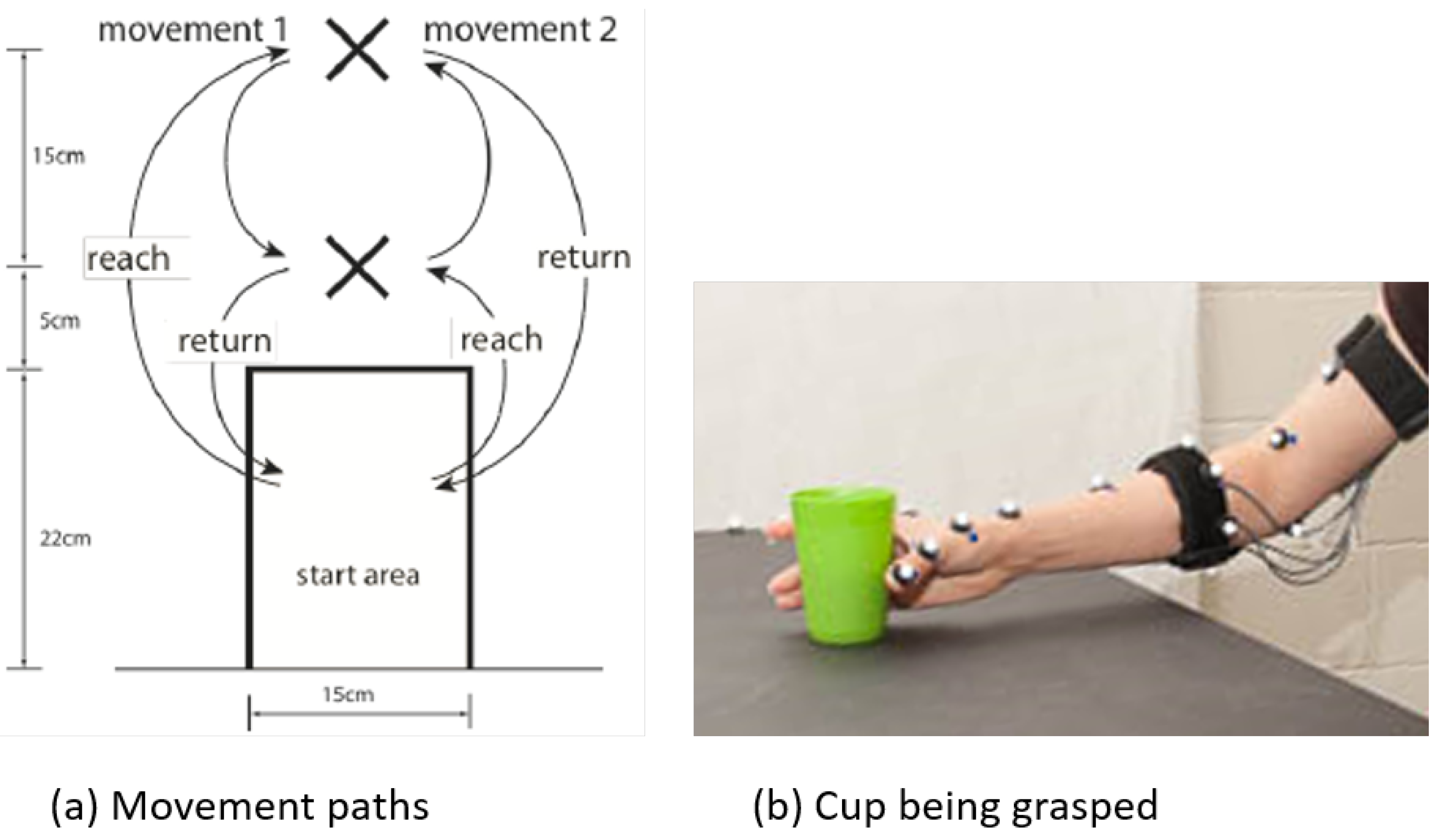
2.1.1. Task
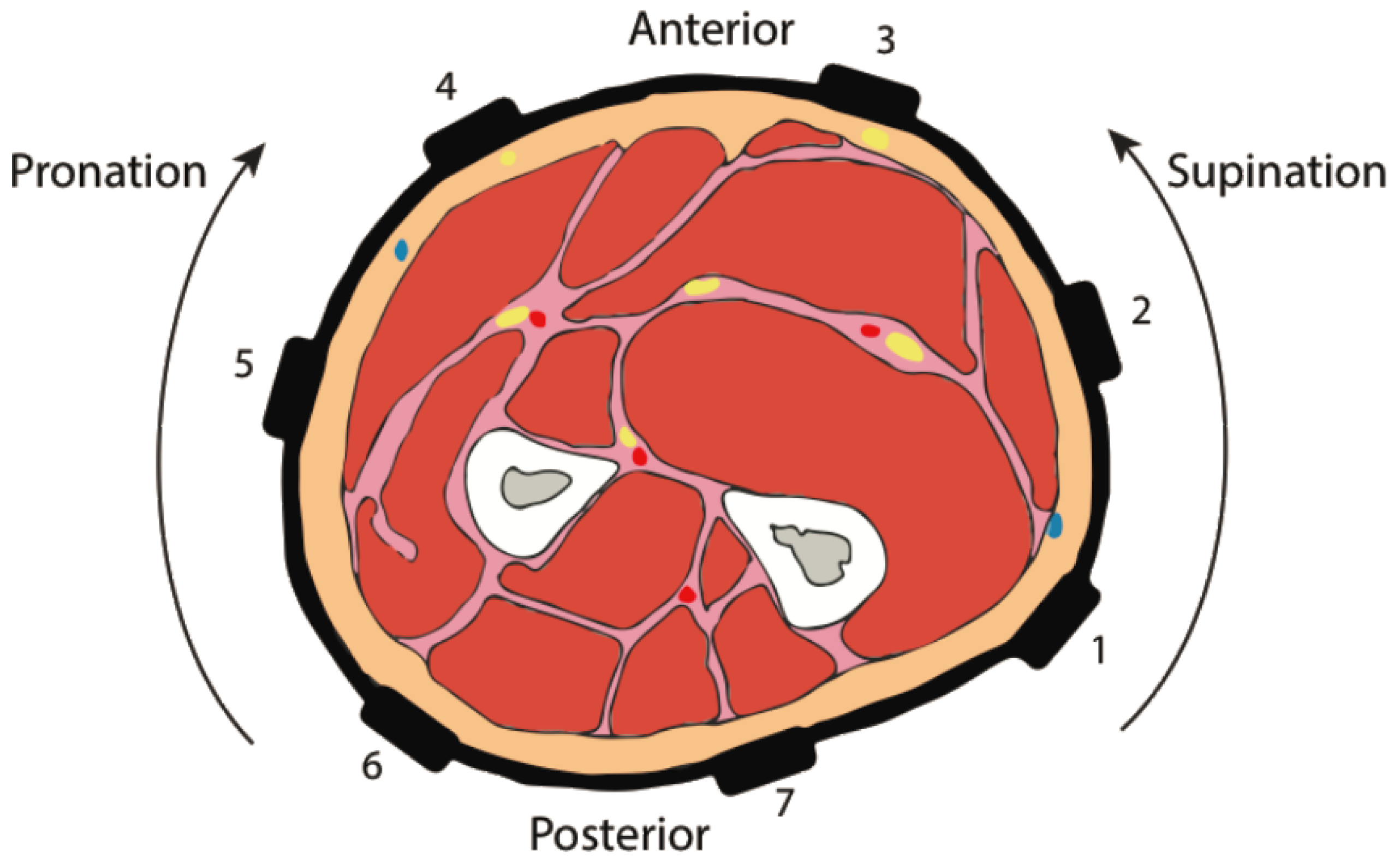
2.1.2. sEMG Sensor Band Configurations
2.1.3. Procedure
2.1.4. Data Acquisition
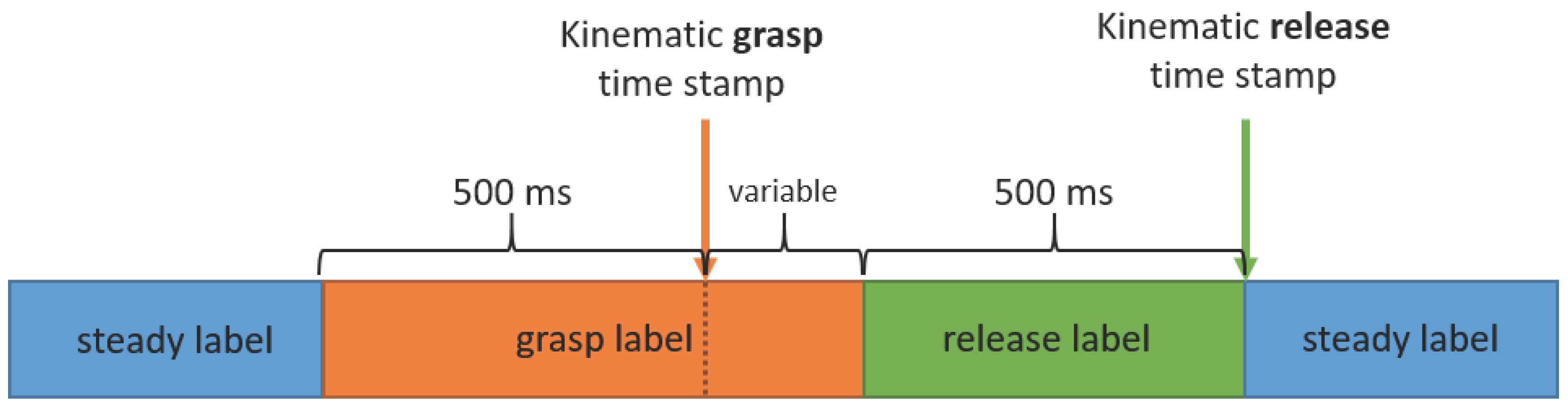
2.2. Data Pre-Processing
2.3. GMM and HMM Formulation
2.4. Training and Testing
2.5. Statistical Analysis
3. Results
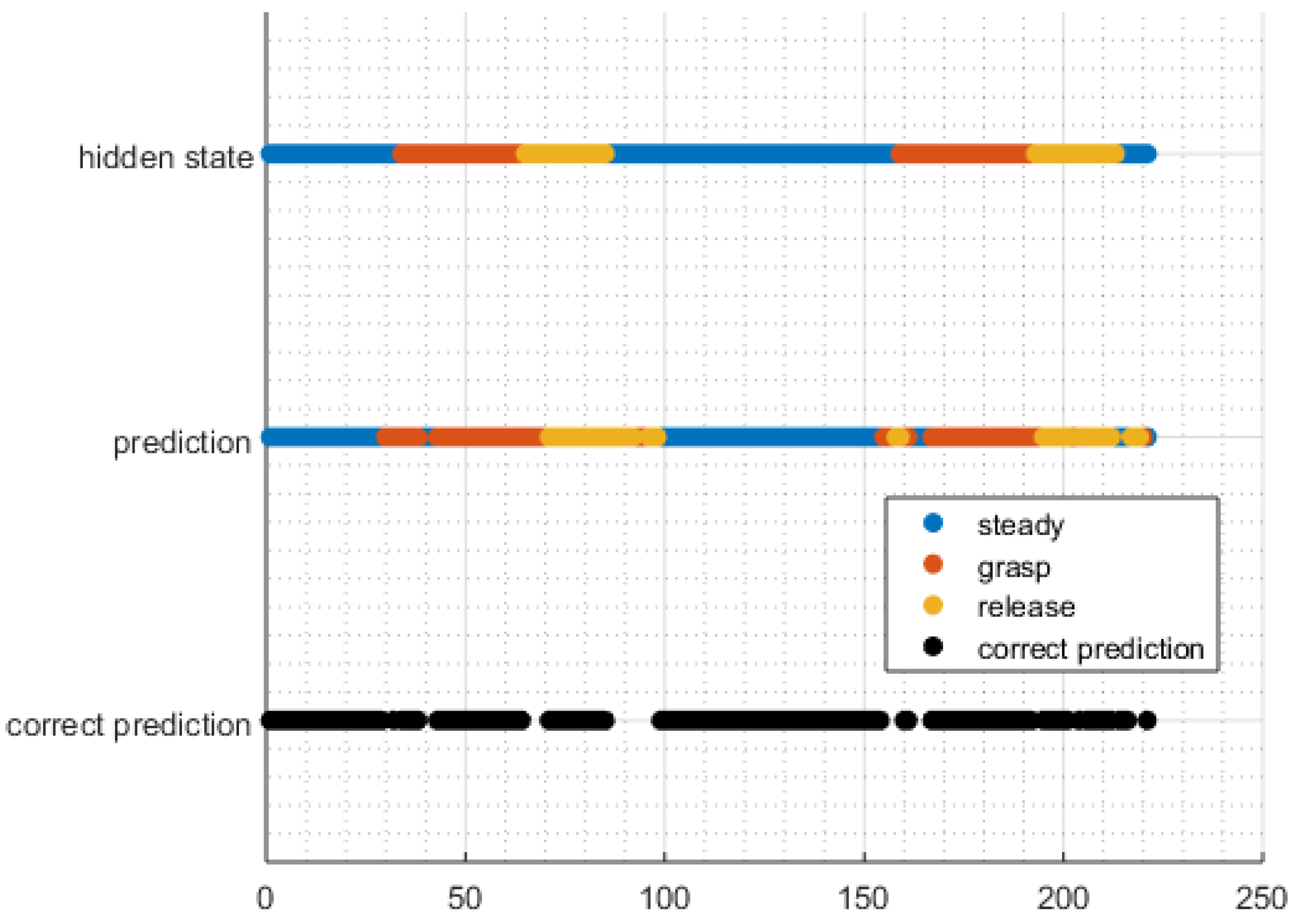
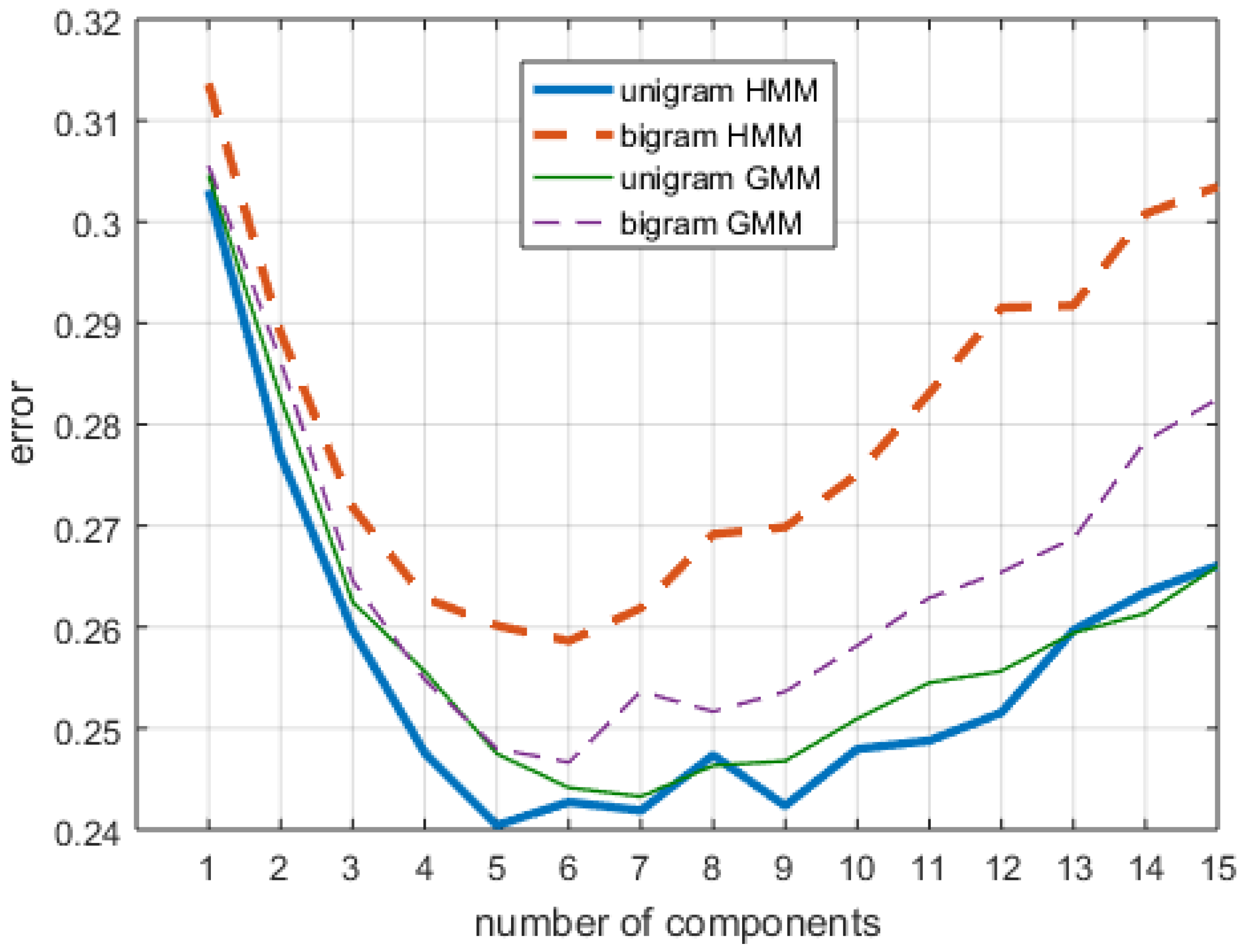
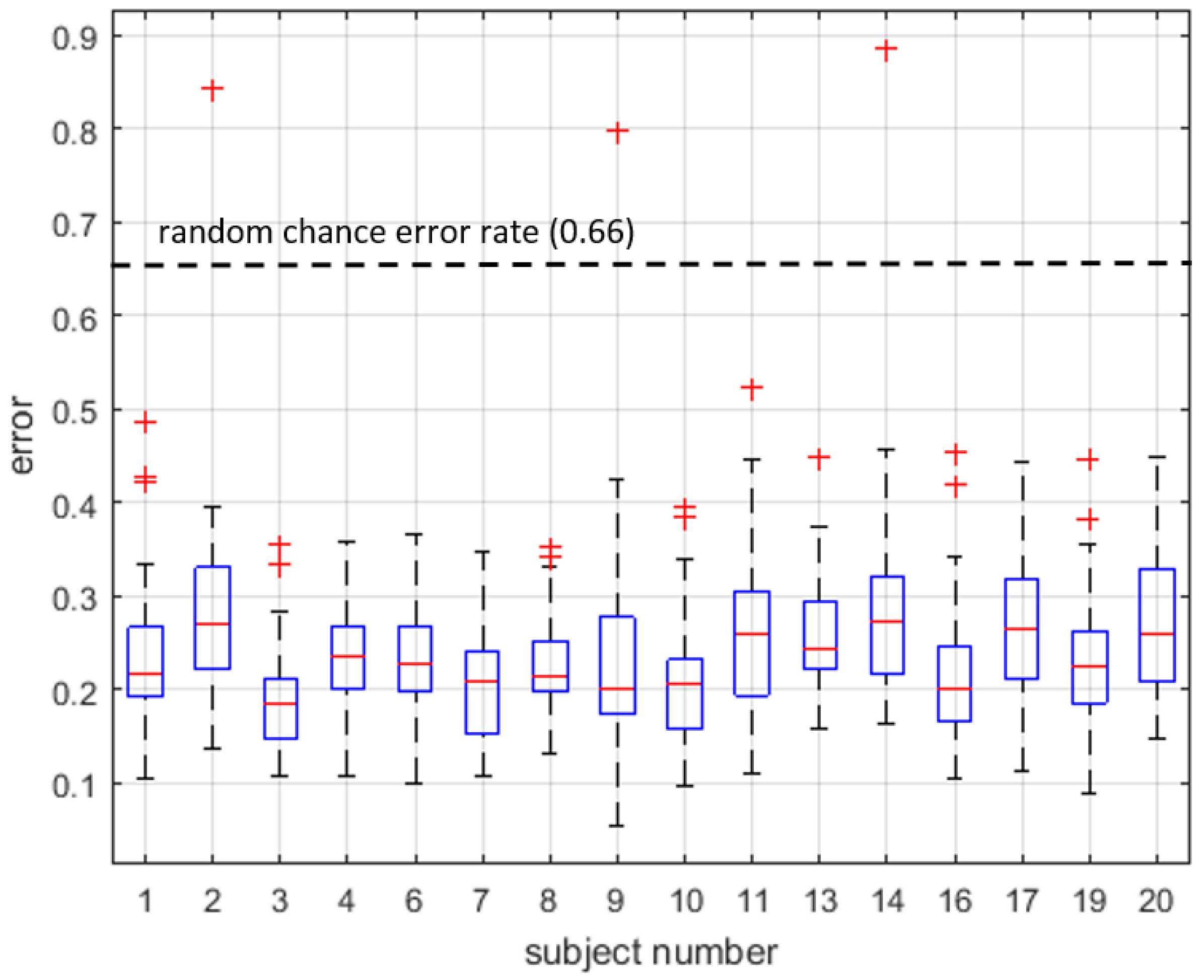
3.1. Classification Accuracy
3.2. Missed Transitions
4. Discussion
4.1. Classifier Selection
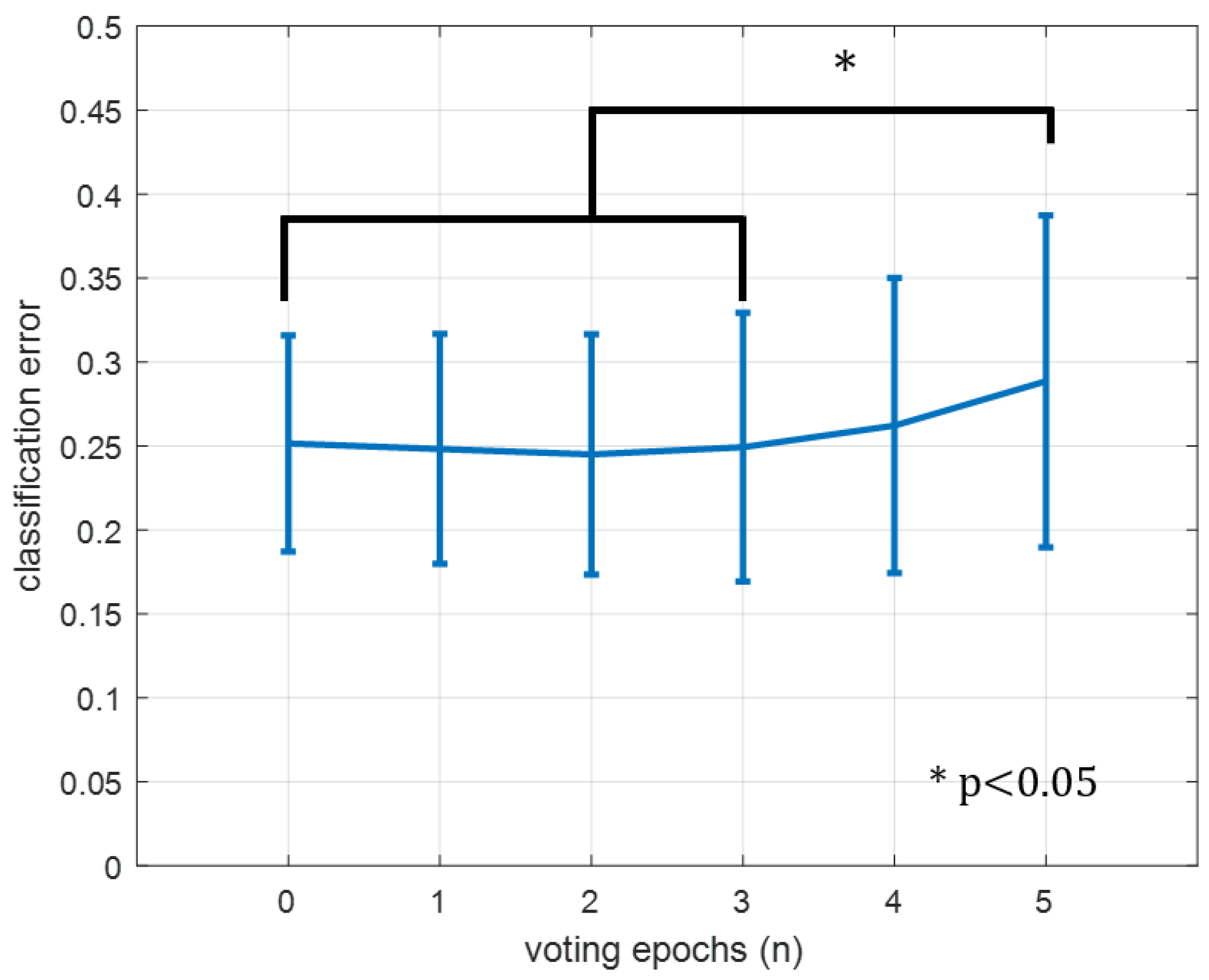
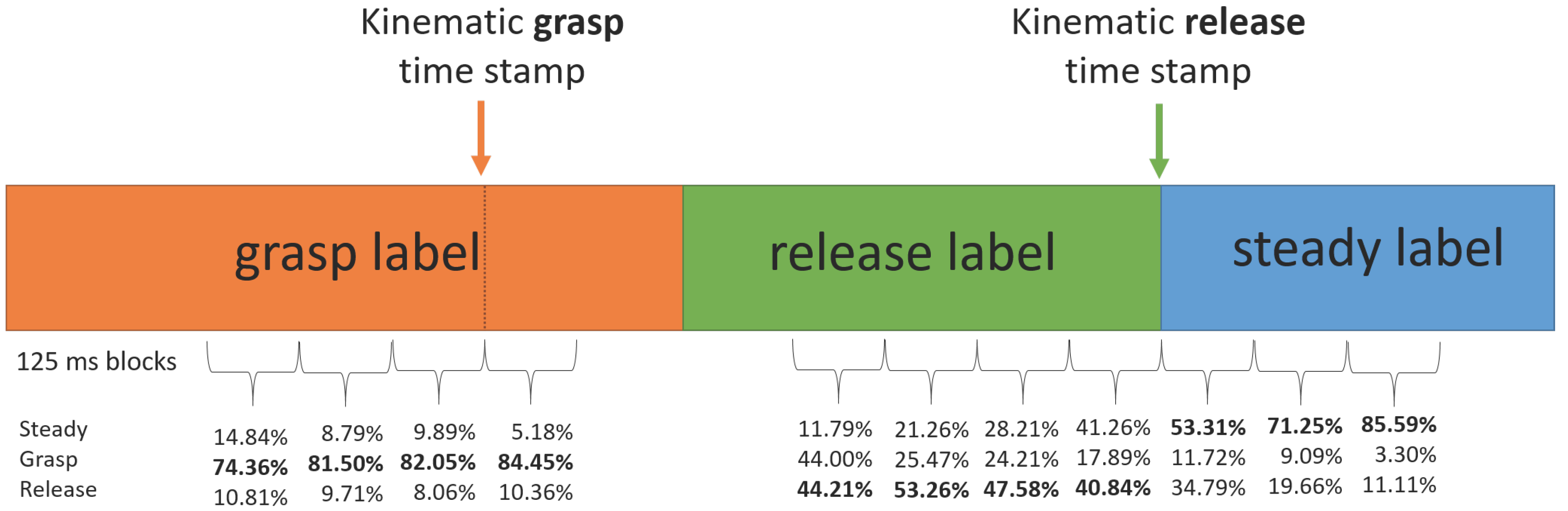
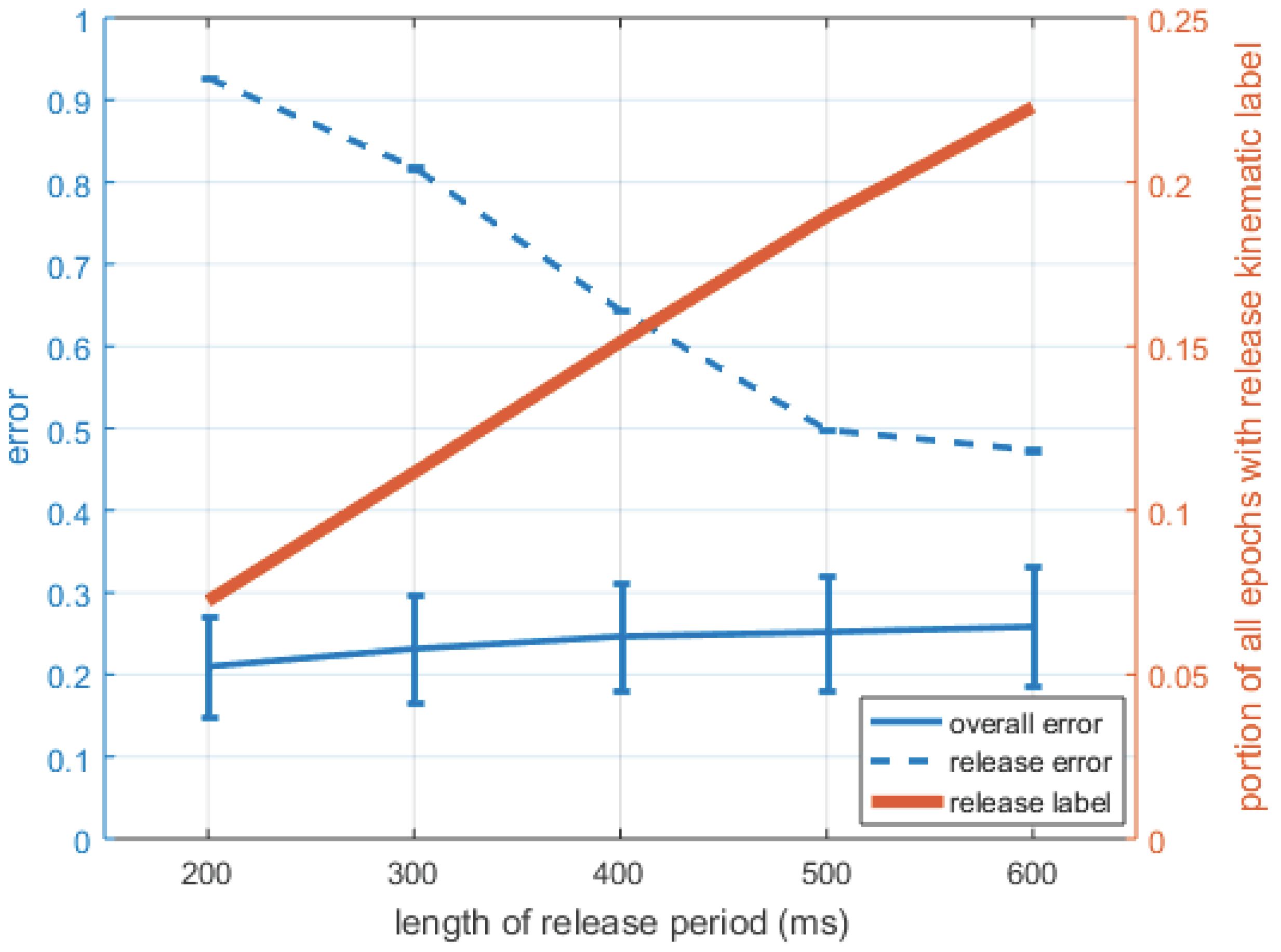
4.2. Label Length and Voting Scheme Analyses
4.3. Comparison to Literature and Additional Limitations
4.4. Implications for Use with Exoskeletons
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kiguchi, K.; Rahman, M.H.; Sasaki, M.; Teramoto, K. Development of a 3DOF mobile exoskeleton robot for human upper-limb motion assist. Robot. Auton. Syst. 2008, 56, 678–691. [Google Scholar] [CrossRef]
- Kwakkel, G.; Kollen, B.J.; Krebs, H.I. Effects of robot-assisted therapy on upper limb recovery after stroke: A systematic review. Neurorehabil. Neural Repair 2008, 22, 111–121. [Google Scholar] [CrossRef] [PubMed]
- Kazerooni, H. Exoskeletons for human power augmentation. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2005, (IROS 2005), Edmonton, AB, Canada, 2–6 August 2005; pp. 3459–3464.
- Guizzo, E.; Goldstein, H. The rise of the body bots [robotic exoskeletons]. IEEE Spectr. 2005, 42, 50–56. [Google Scholar] [CrossRef]
- De Luca, C.J. The use of surface electromyography in biomechanics. J. Appl. Biomech. 1997, 13, 135–163. [Google Scholar] [CrossRef]
- Boostani, R.; Moradi, M.H. Evaluation of the forearm EMG signal features for the control of a prosthetic hand. Physiol. Meas. 2003, 24, 309. [Google Scholar] [CrossRef] [PubMed]
- Oskoei, M.A.; Hu, H. Myoelectric control systems—A survey. Biomed. Signal Process. Control 2007, 2, 275–294. [Google Scholar] [CrossRef]
- Micera, S.; Carpaneto, J.; Raspopovic, S. Control of hand prostheses using peripheral information. IEEE Rev. Biomed. Eng. 2010, 3, 48–68. [Google Scholar] [CrossRef] [PubMed]
- Atkins, D.J.; Heard, D.C.; Donovan, W.H. Epidemiologic Overview of Individuals with Upper-Limb Loss and Their Reported Research Priorities. JPO J. Prosthet. Orthot. 1996, 8, 2–11. [Google Scholar] [CrossRef]
- Song, R.; Tong, K.Y.; Hu, X.; Li, L. Assistive control system using continuous myoelectric signal in robot-aided arm training for patients after stroke. IEEE Trans. Neural Syst. Rehabil. Eng. 2008, 16, 371–379. [Google Scholar] [CrossRef] [PubMed]
- Ferris, D.P.; Lewis, C.L. Robotic lower limb exoskeletons using proportional myoelectric control. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 2009, EMBC 2009, Minneapolis, MN, USA, 3–6 September 2009; pp. 2119–2124.
- Englehart, K.; Hudgin, B.; Parker, P.A. A wavelet-based continuous classification scheme for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 2001, 48, 302–311. [Google Scholar] [CrossRef] [PubMed]
- Chan, A.D.; Englehart, K.B. Continuous myoelectric control for powered prostheses using hidden Markov models. IEEE Trans. Biomed. Eng. 2005, 52, 121–124. [Google Scholar] [CrossRef] [PubMed]
- Wolf, M.T.; Assad, C.; Stoica, A.; You, K.; Jethani, H.; Vernacchia, M.T.; Fromm, J.; Iwashita, Y. Decoding static and dynamic arm and hand gestures from the JPL BioSleeve. In Proceedings of the 2013 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2013; pp. 1–9.
- Wolf, M.T.; Assad, C.; Vernacchia, M.T.; Fromm, J.; Jethani, H.L. Gesture-based robot control with variable autonomy from the JPL BioSleeve. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 1160–1165.
- Oskoei, M.A.; Hu, H. Support vector machine-based classification scheme for myoelectric control applied to upper limb. IEEE Trans. Biomed. Eng. 2008, 55, 1956–1965. [Google Scholar] [CrossRef] [PubMed]
- Fukuda, O.; Tsuji, T.; Kaneko, M.; Otsuka, A. A human-assisting manipulator teleoperated by EMG signals and arm motions. IEEE Trans. Robot. Autom. 2003, 19, 210–222. [Google Scholar] [CrossRef]
- Artemiadis, P.K.; Kyriakopoulos, K.J. An EMG-based robot control scheme robust to time-varying EMG signal features. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 582–588. [Google Scholar] [CrossRef] [PubMed]
- Rabiner, L.R. A tutorial on hidden Markov models and selected applications in speech recognition. Proc. IEEE 1989, 77, 257–286. [Google Scholar] [CrossRef]
- Russell, S.; Norvig, P. Artificial Intelligence: A Modern Approach; Prentice Hall: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Marchal-Crespo, L.; Zimmermann, R.; Lambercy, O.; Edelmann, J.; Fluet, M.C.; Wolf, M.; Gassert, R.; Riener, R. Motor execution detection based on autonomic nervous system responses. Physiol. Meas. 2013, 34, 35–51. [Google Scholar] [CrossRef] [PubMed]
- Marchal-Crespo, L.; Novak, D.; Zimmerman, R.; Lambercy, O.; Gassert, R.; Riener, R. Detecting Motion Intention in Stroke Survivors Using Automatic Nervous System Responses. In Proceedings of the IEEE/RAS-EMBS International Conference on Rehabilitation Robotics, ICORR, 2015, Singapore, 11–14 August 2015.
- Loh, M.N.; Kirsch, L.; Rothwell, J.C.; Lemon, R.N.; Davare, M. Information about the weight of grasped objects from vision and internal models interacts within the primary motor cortex. J. Neurosci. 2010, 30, 6984–6990. [Google Scholar] [CrossRef] [PubMed]
- Beckers, N.; Fineman, R.; Stirling, L. Anticipatory Signals in Kinematics and Muscle Activity during Functional Grasp and Release. In Proceedings of the 2015 IEEE 12th International Conference on Wearable and Implantable Body Sensor Networks (BSN), Cambridge, MA, USA, 9–12 June 2015.
- Cattaneo, L.; Voss, M.; Brochier, T.; Prabhu, G.; Wolpert, D.; Lemon, R. A cortico-cortical mechanism mediating object-driven grasp in humans. Proc. Natl. Acad. Sci. USA 2005, 102, 898–903. [Google Scholar] [CrossRef] [PubMed]
- Gazzoni, M.; Celadon, N.; Mastrapasqua, D.; Paleari, M.; Margaria, V.; Ariano, P. Quantifying forearm muscle activity during wrist and finger movements by means of multi-channel electromyography. PLoS ONE 2014, 9, e109943. [Google Scholar] [CrossRef] [PubMed]
- Saponas, T.S.; Tan, D.S.; Morris, D.; Balakrishnan, R. Demonstrating the feasibility of using forearm electromyography for muscle-computer interfaces. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Florence, Italy, 5–10 April 2008; pp. 515–524.
- Ryait, H.S.; Arora, A.; Agarwal, R. Interpretations of wrist/grip operations from SEMG signals at different locations on arm. IEEE Trans. Biomed. Circuits Syst. 2010, 4, 101–111. [Google Scholar] [CrossRef] [PubMed]
- Khokhar, Z.O.; Xiao, Z.G.; Menon, C. Surface EMG pattern recognition for real-time control of a wrist exoskeleton. Biomed. Eng. Online 2010, 9. [Google Scholar] [CrossRef] [PubMed]
- Ambrosini, E.; Ferrante, S.; Tibiletti, M.; Schauer, T.; Klauer, C.; Ferrigno, G.; Pedrocchi, A. An EMG-controlled neuroprosthesis for daily upper limb support: A preliminary study. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBC, Boston, MA, USA, 30 August–3 September 2011; pp. 4259–4262.
- Zardoshti-Kermani, M.; Wheeler, B.C.; Badie, K.; Hashemi, R.M. EMG feature evaluation for movement control of upper extremity prostheses. IEEE Trans. Rehabil. Eng. 1995, 3, 324–333. [Google Scholar] [CrossRef]
- Martin, J.H.; Jurafsky, D. Speech and Language Processing, International Edition ed; Prentice Hall: Upper Saddle River, NJ, USA, 2000. [Google Scholar]
- McLachlan, G.; Krishnan, T. The EM Algorithm and Extensions; John Wiley & Sons: Hoboken, NJ, USA, 2007; Volume 382. [Google Scholar]
- Englehart, K.; Hudgins, B.; Chan, A.D. Continuous multifunction myoelectric control using pattern recognition. Technol. Disabil. 2003, 15, 95–103. [Google Scholar]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R. An Introduction to Statistical Learning; Springer: New York, NY, USA, 2013; Volume 112. [Google Scholar]
- Dimitrova, N.; Dimitrov, G. Interpretation of EMG changes with fatigue: Facts, pitfalls, and fallacies. J. Electromyogr. Kinesiol. 2003, 13, 13–36. [Google Scholar] [CrossRef]
- Sangole, A.P.; Levin, M.F. Palmar arch dynamics during reach-to-grasp tasks. Exp. Brain Res. 2008, 190, 443–452. [Google Scholar] [CrossRef] [PubMed]
- Wing, A.M.; Turton, A.; Fraser, C. Grasp size and accuracy of approach in reaching. J. Motor Behav. 1986, 18, 245–260. [Google Scholar] [CrossRef]
- Collins, D.; Knight, B.; Prochazka, A. Contact-evoked changes in EMG activity during human grasp. J. Neurophysiol. 1999, 81, 2215–2225. [Google Scholar] [PubMed]
- Kubler, A.; Mushahwar, V.; Hochberg, L.R.; Donoghue, J.P. BCI meeting 2005-workshop on clinical issues and applications. IEEE Trans. Neural Syst. Rehabil. Eng. 2006, 14, 131. [Google Scholar] [CrossRef] [PubMed]
- Lundborg, G.; Rosen, B. Sensory substitution in prosthetics. Hand Clin. 2001, 17, 481–488. [Google Scholar] [PubMed]
- Cipriani, C.; Zaccone, F.; Micera, S.; Carrozza, M.C. On the shared control of an EMG-controlled prosthetic hand: Analysis of user–prosthesis interaction. IEEE Trans. Robot. 2008, 24, 170–184. [Google Scholar] [CrossRef]
- Poston, B.; Danna-Dos Santos, A.; Jesunathadas, M.; Hamm, T.M.; Santello, M. Force-independent distribution of correlated neural inputs to hand muscles during three-digit grasping. J. Neurophysiol. 2010, 104, 1141–1154. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Min | Max | Mean | Standard Deviation |
|---|---|---|---|---|
| Age (years) | 19 | 30 | 23.6 | 3.13 |
| Forearm Circumference * (cm) | 22.0 | 28.5 | 25.7 | 1.91 |
| Forearm Length ** (cm) | 19.5 | 29.6 | 24.8 | 2.42 |
| Seated Shoulder Height (cm) | 53.0 | 63.0 | 58.3 | 3.16 |
| Mass (kg) | 59.9 | 83.9 | 75.2 | 7.19 |
| (a) Unigram GMM | (b) Bigram GMM | |||||||||
| Predictions | Predictions | |||||||||
| S | G | R | S | G | R | |||||
| labels | S | 84.6869 | 7.3709 | 7.9422 | labels | S | 85.4543 | 7.2222 | 6.3235 | |
| G | 13.5847 | 72.6140 | 13.8013 | G | 16.2129 | 72.6117 | 11.1754 | |||
| R | 23.0644 | 27.6310 | 49.3046 | R | 25.7886 | 30.6402 | 43.5711 | |||
| (c) Unigram HMM | (d) Bigram HMM | |||||||||
| Predictions | Predictions | |||||||||
| S | G | R | S | G | R | |||||
| labels | S | 86.3376 | 6.1729 | 7.4895 | labels | S | 87.2922 | 6.8754 | 5.8324 | |
| G | 15.3602 | 72.9194 | 11.7204 | G | 21.9088 | 68.0618 | 10.0294 | |||
| R | 23.5518 | 28.8595 | 47.5888 | R | 30.8624 | 28.3947 | 40.7429 | |||
| Steady | Grasp | Release | |
|---|---|---|---|
| precision | 86.34 | 72.92 | 47.59 |
| recall | 68.93 | 67.55 | 71.24 |
| F-score | 76.66 | 70.13 | 57.06 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siu, H.C.; Shah, J.A.; Stirling, L.A. Classification of Anticipatory Signals for Grasp and Release from Surface Electromyography. Sensors 2016, 16, 1782. https://doi.org/10.3390/s16111782
Siu HC, Shah JA, Stirling LA. Classification of Anticipatory Signals for Grasp and Release from Surface Electromyography. Sensors. 2016; 16(11):1782. https://doi.org/10.3390/s16111782
Chicago/Turabian StyleSiu, Ho Chit, Julie A. Shah, and Leia A. Stirling. 2016. "Classification of Anticipatory Signals for Grasp and Release from Surface Electromyography" Sensors 16, no. 11: 1782. https://doi.org/10.3390/s16111782
APA StyleSiu, H. C., Shah, J. A., & Stirling, L. A. (2016). Classification of Anticipatory Signals for Grasp and Release from Surface Electromyography. Sensors, 16(11), 1782. https://doi.org/10.3390/s16111782