
RSS Fingerprint Based Indoor Localization Using Sparse Representation with Spatio-Temporal Constraint


Abstract
:1. Introduction
2. Related Works
3. Localization Method Based on Sparse Representation
3.1. Off-Line Fingerprint Maps Construction Stage
3.2. Online Localization Stage
4. Localization Method Based on Sparse Representation with the Spatio-Temporal Constraint
5. Optimization Solution to the ST-SR Model
5.1. Update while Fixing and
5.2. Update while Fixing and
5.3. Update while Fixing and
5.4. Update the Multiplier , , and Parameter γ
| Algorithm 1 Solving the proposed ST-SR model by ADMM |
| , , , , , , , , the number of maximum iteration , set . |
| The fingerprint maps matrix Φ, the temporal constraint matrix , the spatial constraint matrix , the tunable parameter , and ; |
while not converged and do
|
| end while |
| The matrices , and . |
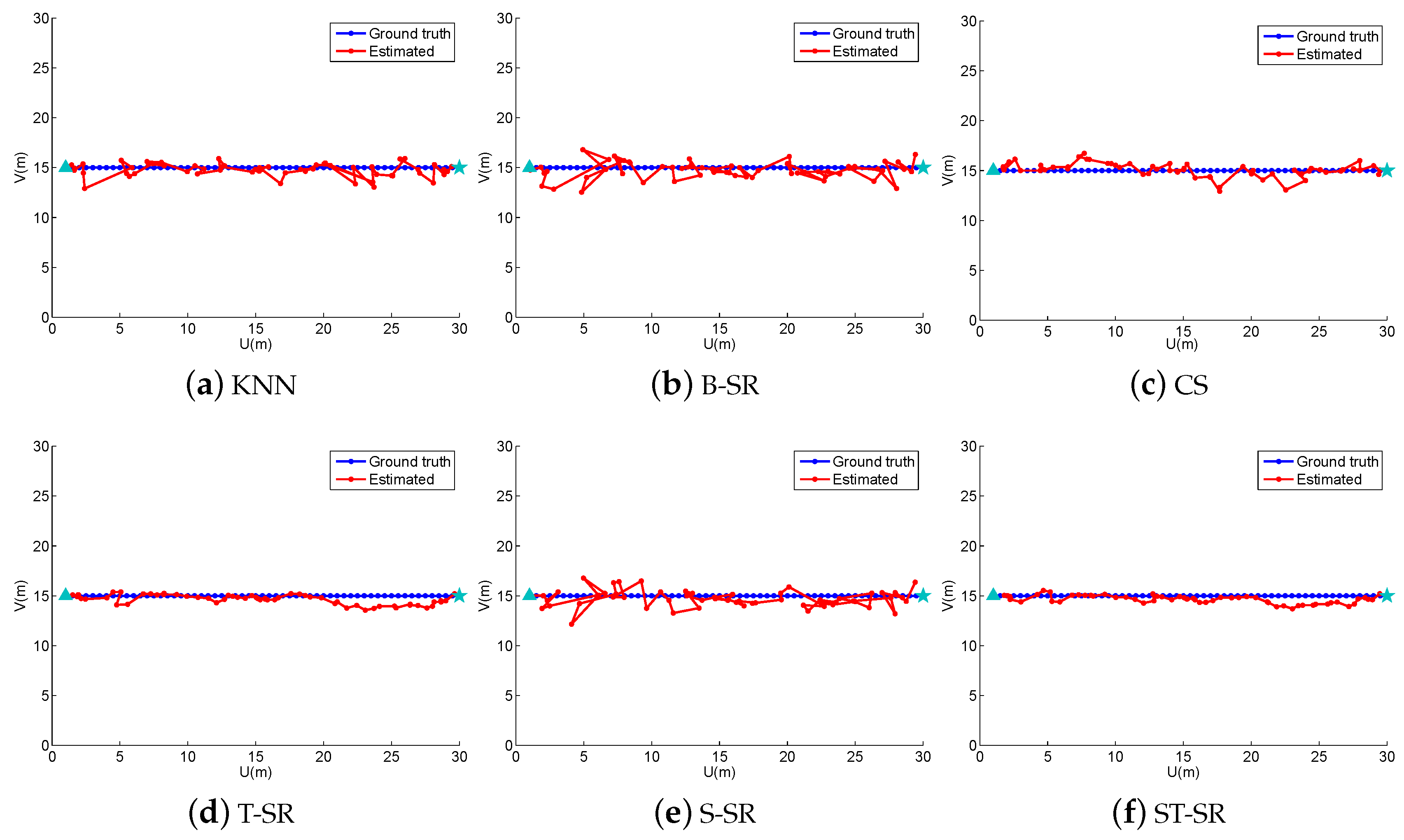
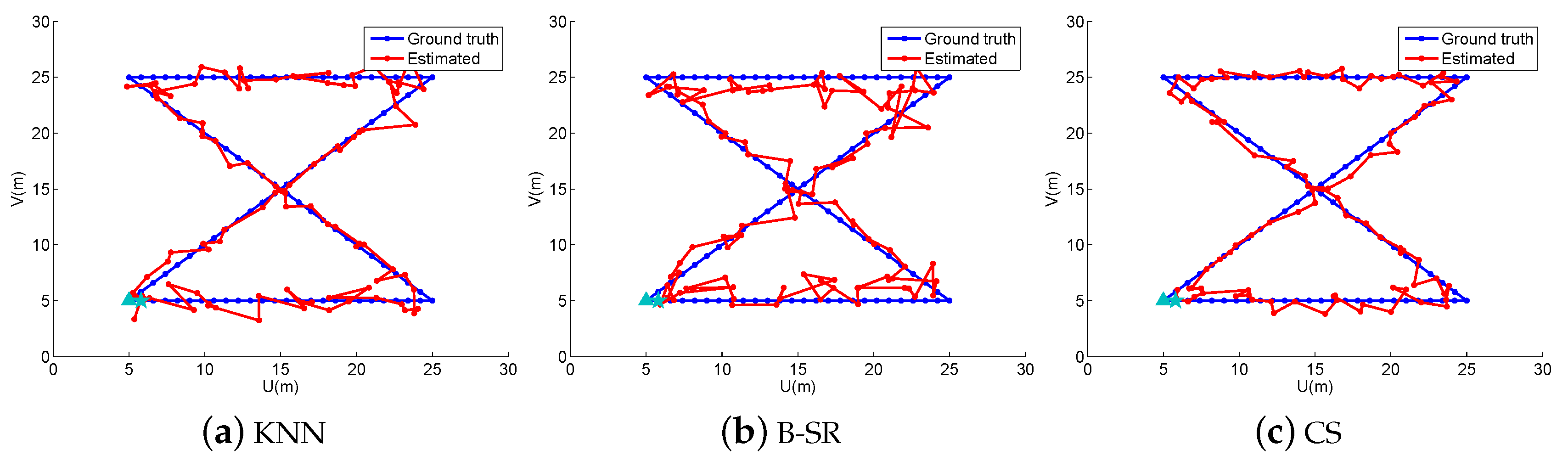
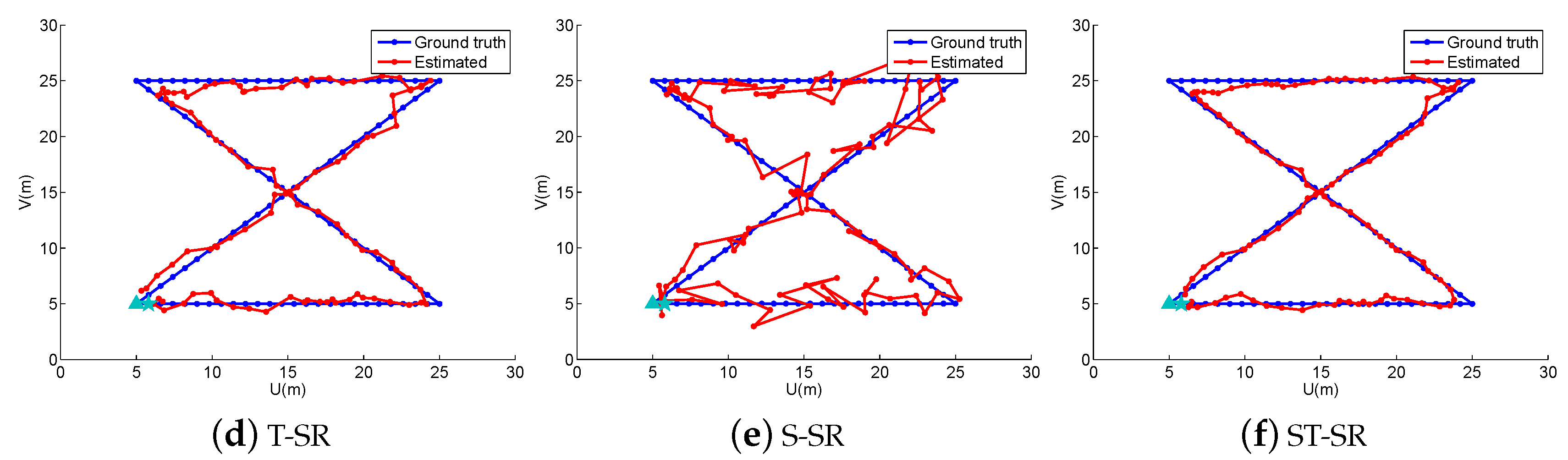
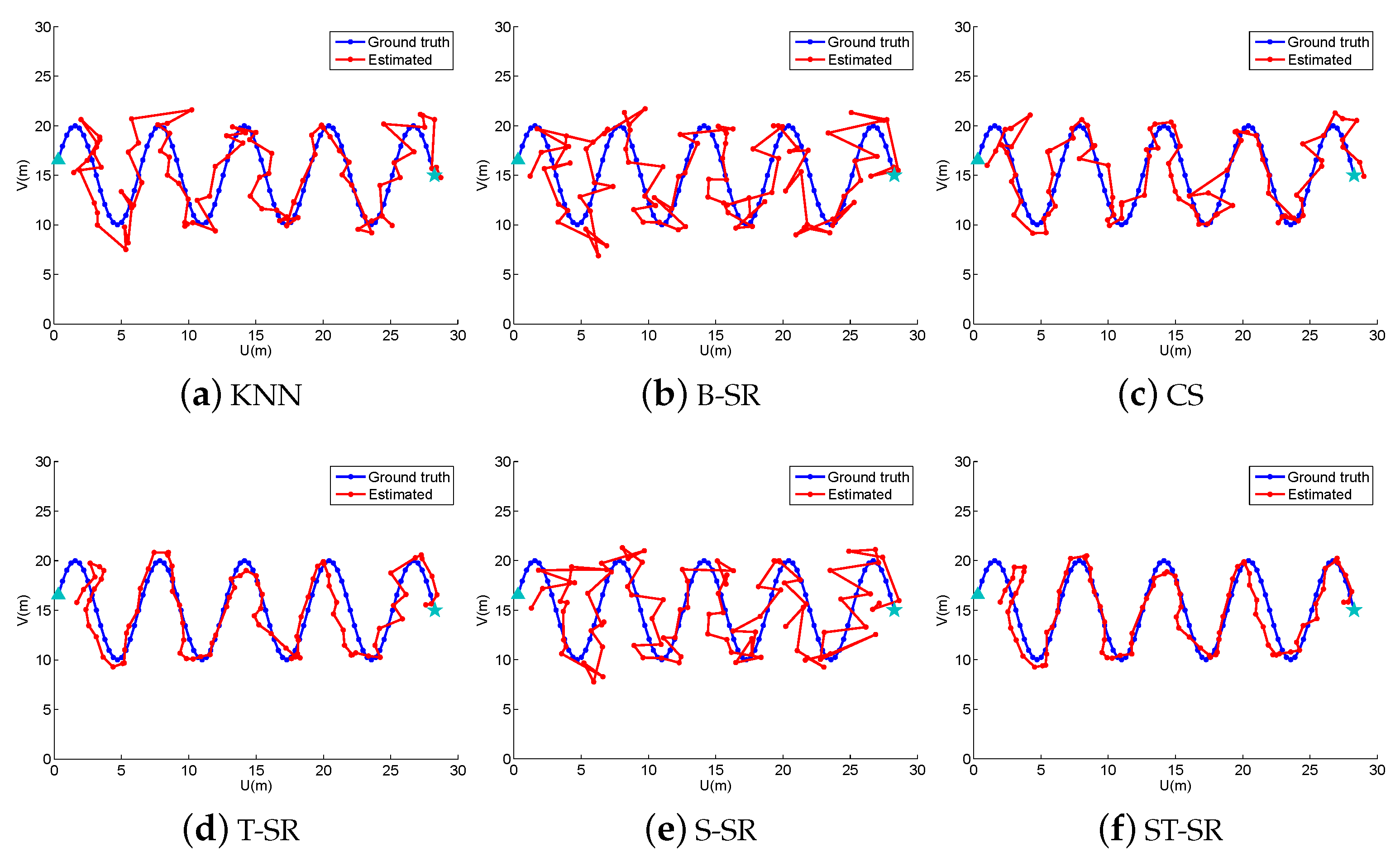
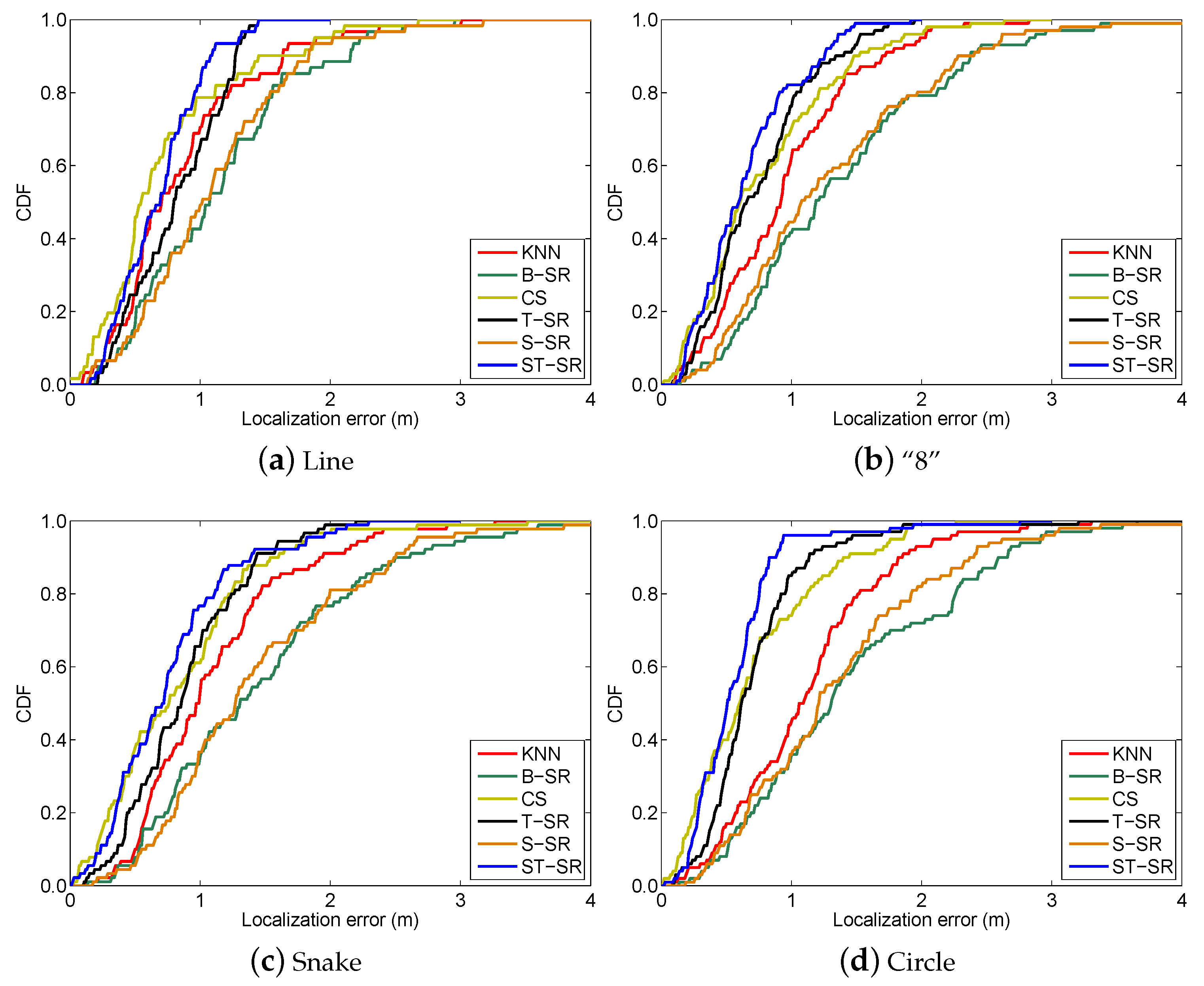
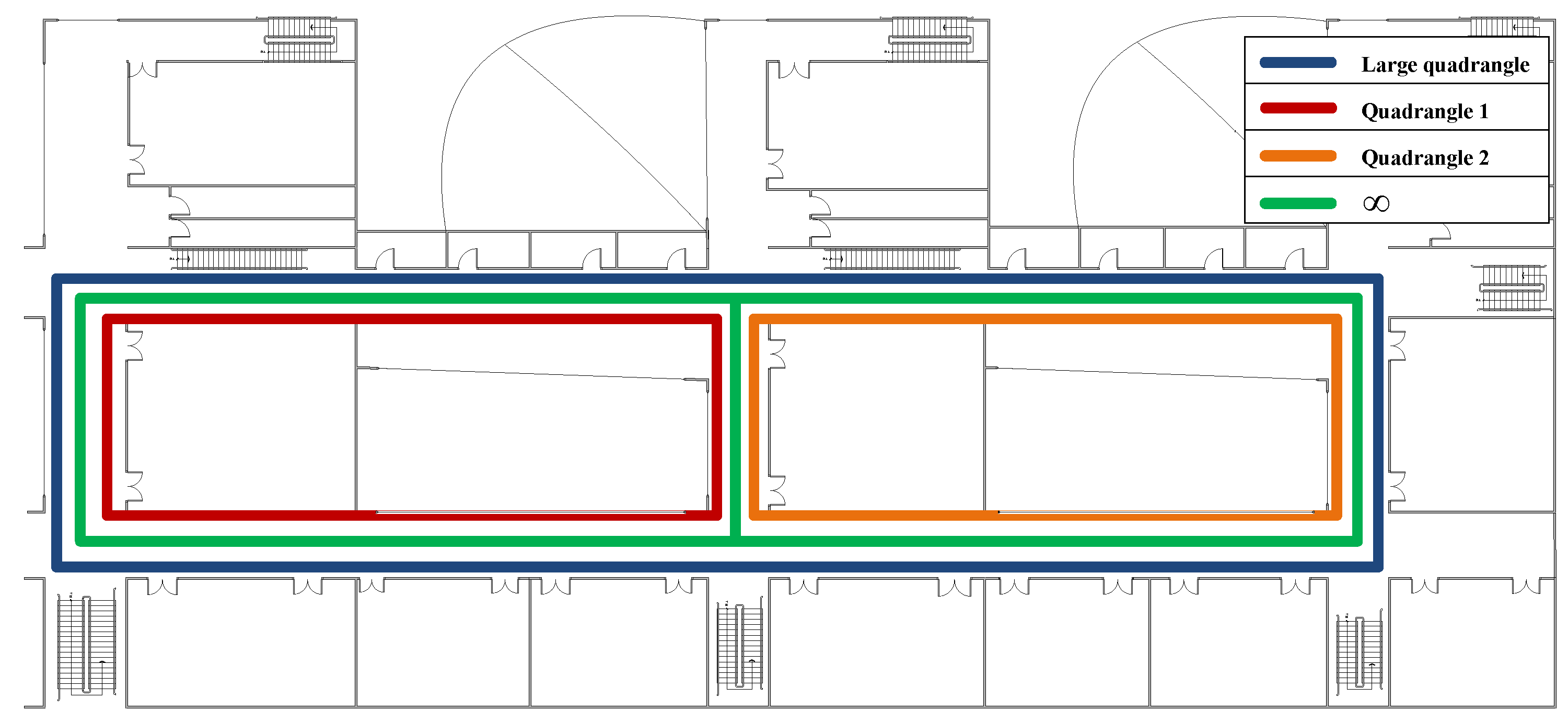
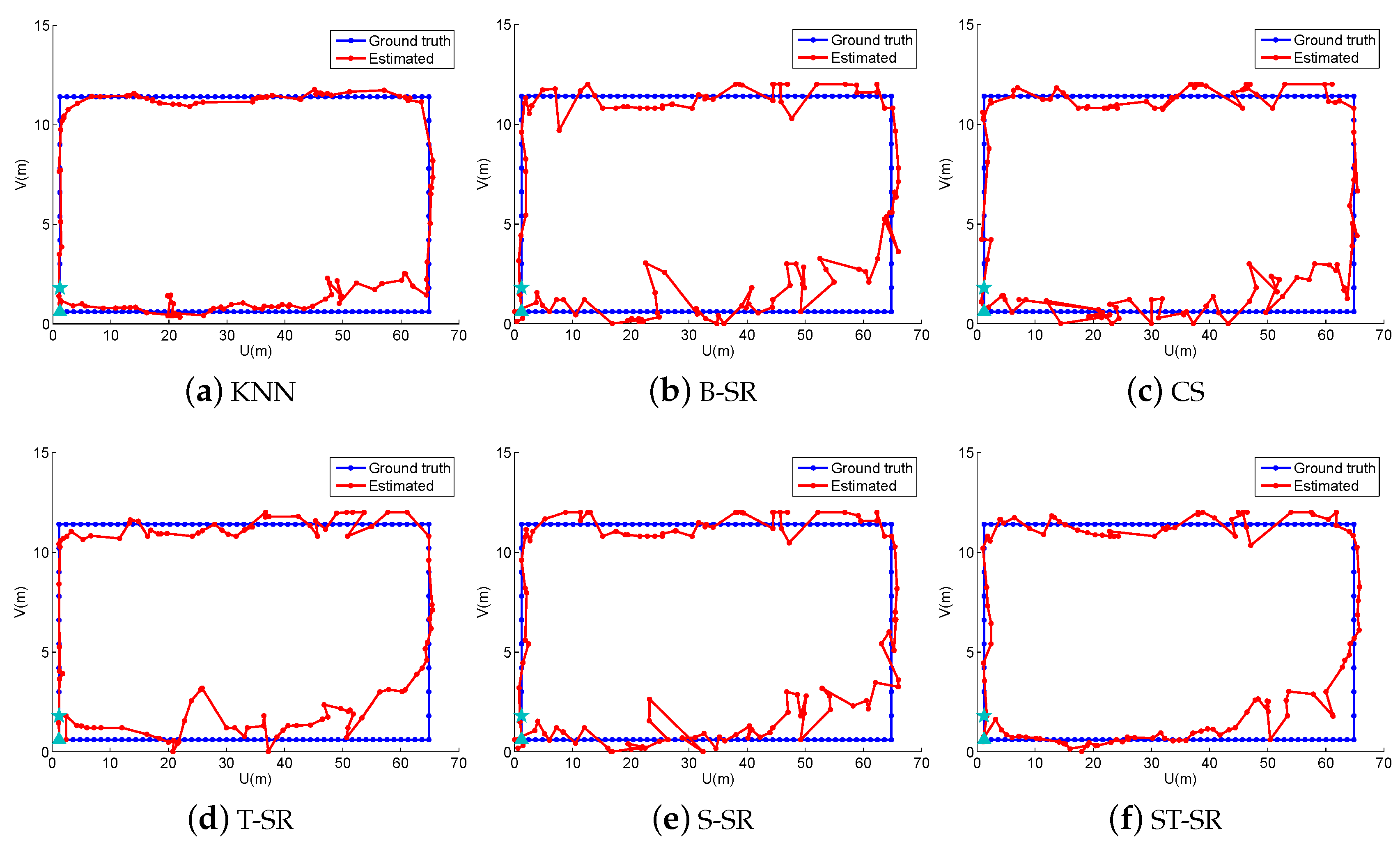
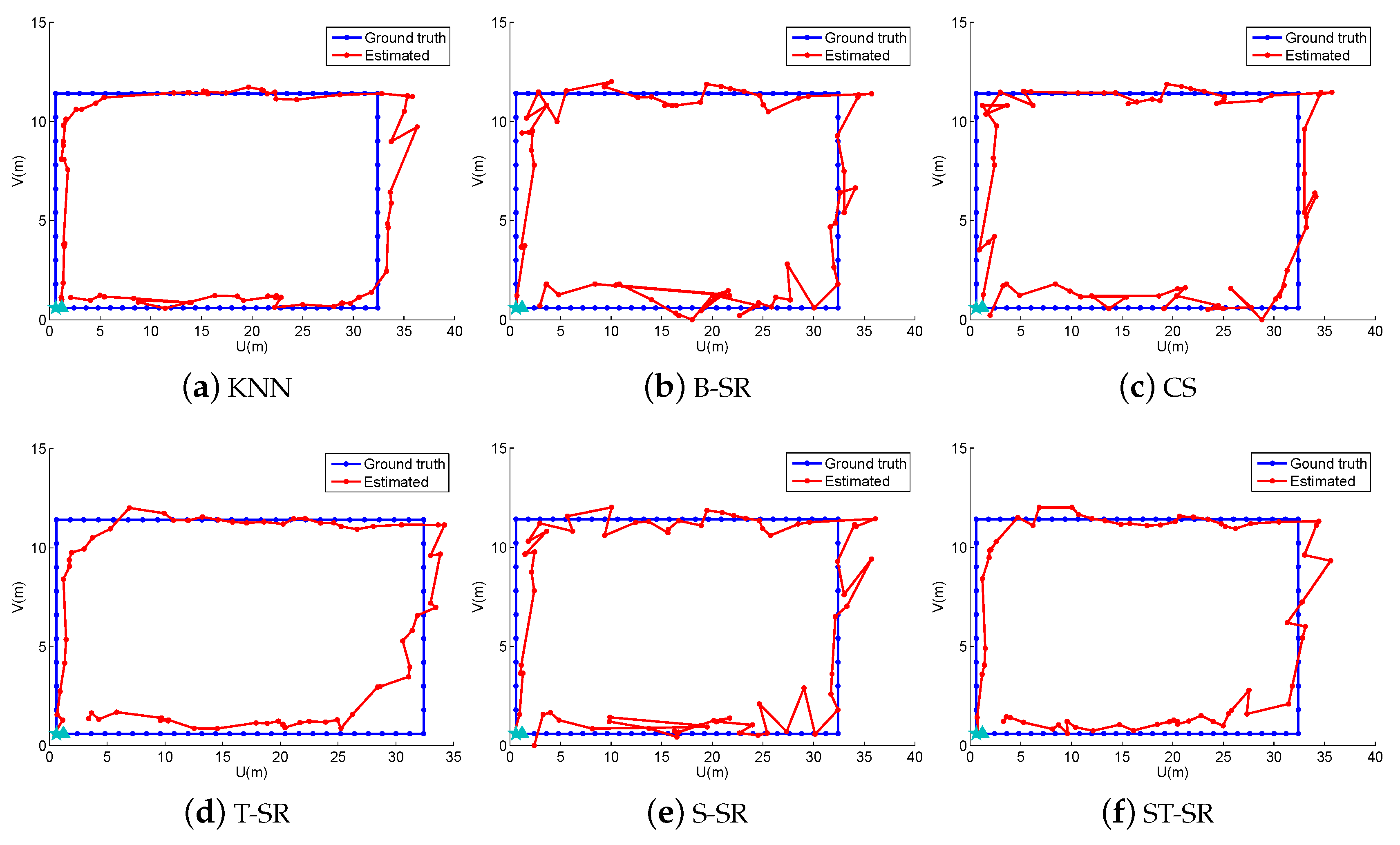
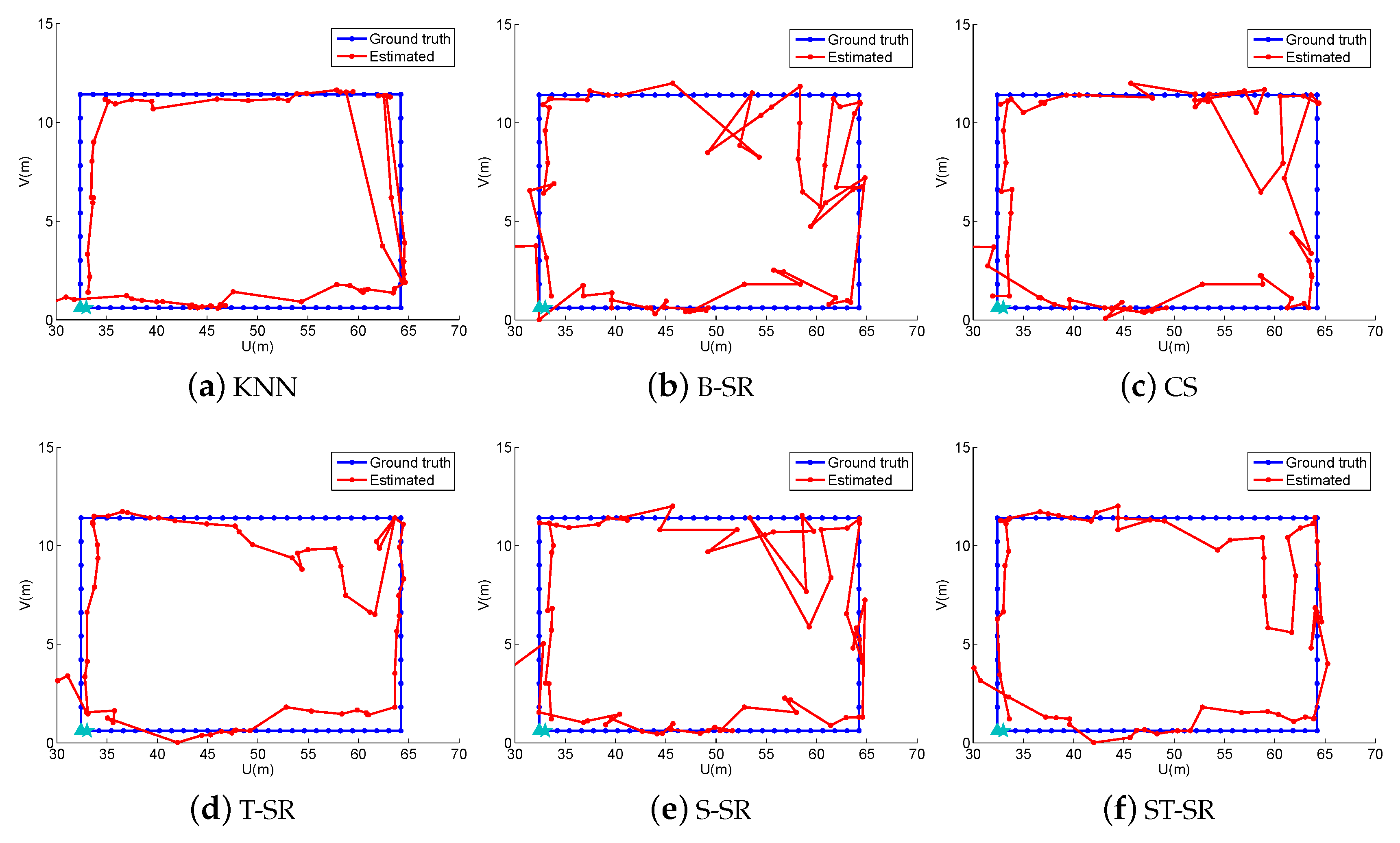
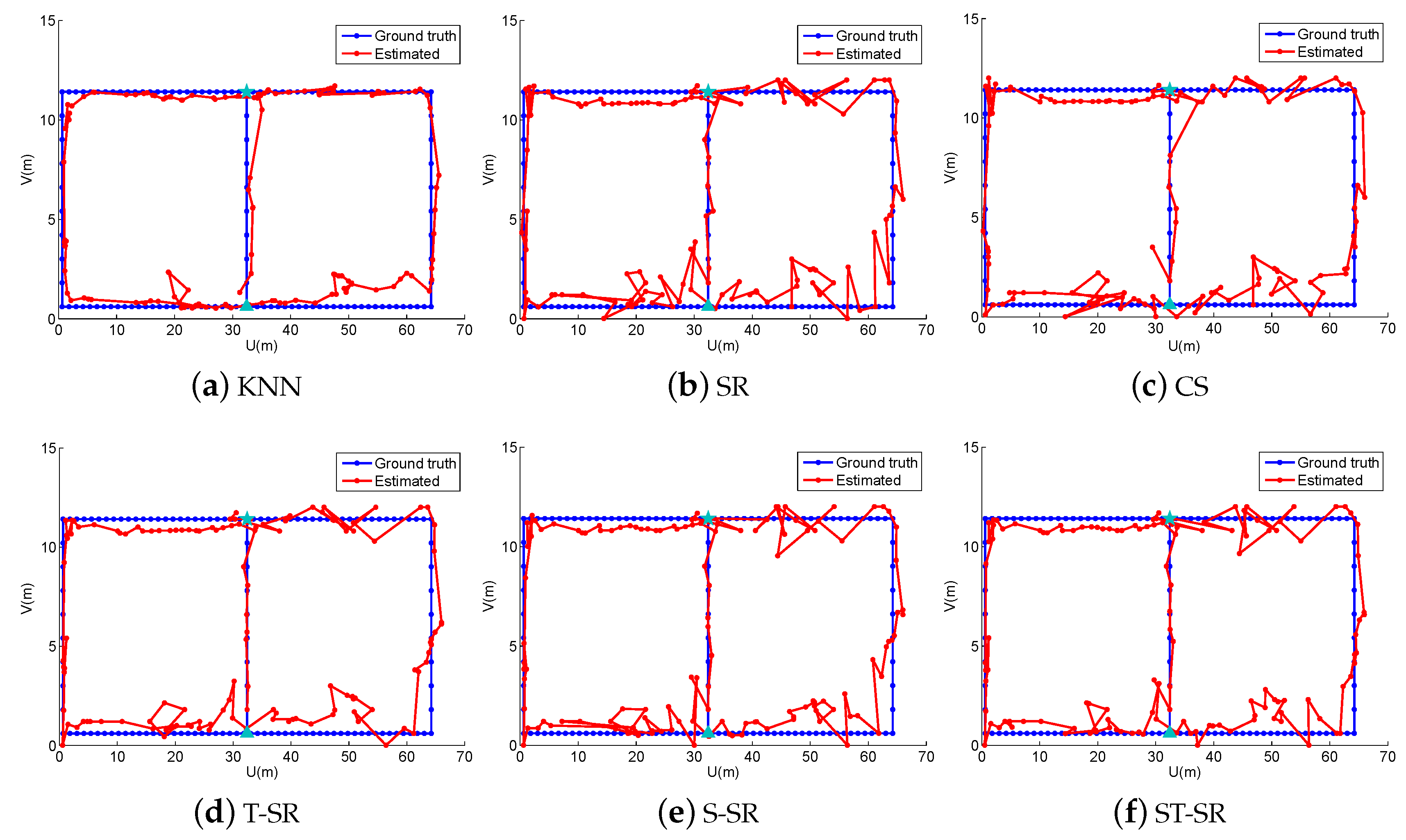
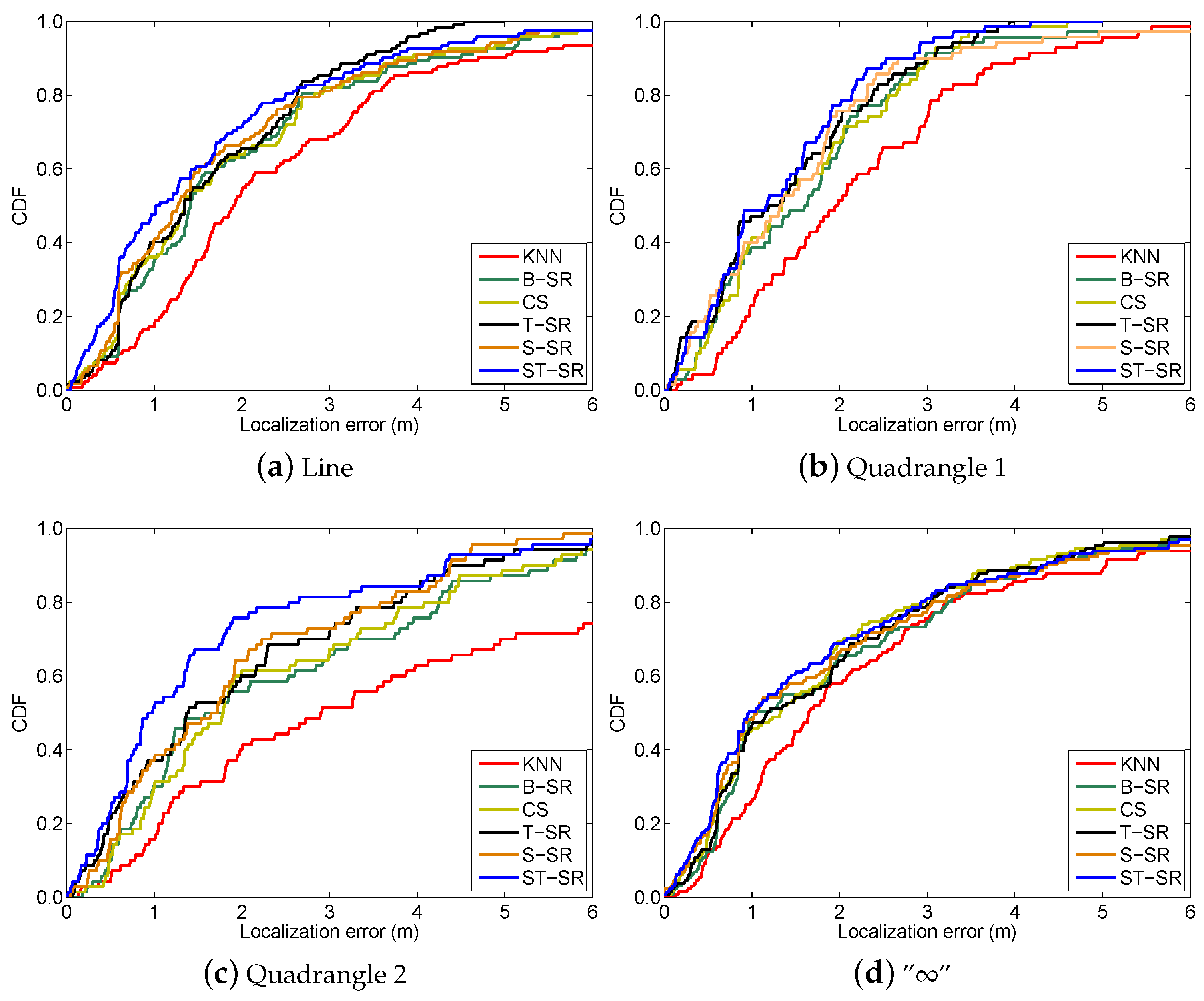
6. Experiments
6.1. Experiments in the Simulated Scene
6.2. Experiment in a Real Scene
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| RSS | Received Signal Strength |
| B-SR | Basic Sparse Representation |
| T-SR | Temporal Sparse Representation |
| S-SR | Spatial Sparse Representation |
| ST-SR | Spatio-Temporal Sparse Representation |
| CS | Compressive Sensing |
References
- Want, R.; Hopper, A.; Falcão, V.; Gibbons, J. The active badge location system. ACM Trans. Inf. Syst. 1992, 10, 91–102. [Google Scholar] [CrossRef]
- Harter, A.; Hopper, A.; Steggles, P.; Ward, A.; Webster, P. The anatomy of a context-aware application. Wirel. Netw. 2002, 8, 187–197. [Google Scholar] [CrossRef]
- Yang, S.H.; Kim, H.; Son, Y.; Han, S. Three-Dimensional Visible Light Indoor Localization Using AOA and RSS with Multiple Optical Receivers. J. Lightwave Technol. 2014, 32, 2480–2485. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the 19th Annual Joint Conference of the IEEE Computer and Communications Societies (IEEE INFOCOM), Tel Aviv, Israel, 26–30 March 2000; pp. 775–784.
- Jun, J.; Chakraborty, S.; He, L.; Gu, Y.; Agrawal, D.P. Robust and Undemanding WiFi-fingerprint based Indoor Localization with Independent Access Points. In Proceedings of the Microsoft Indoor Localization Competition (IPSN), Seattle, WA, USA, 13–17 April 2015; pp. 1–2.
- Kaemarungsi, K.; Krishnamurthy, P. Modeling of indoor positioning systems based on location fingerprinting. In Proceedings of the 23rd Annual Joint Conference of the IEEE Computer and Communications Societies (IEEE INFOCOM), Hong Kong, China, 7–11 March 2004; pp. 1012–1022.
- Fang, Y.; Deng, Z.; Xue, C.; Jiao, J.; Zeng, H.; Zheng, R.; Lu, S. Application of an Improved K Nearest Neighbor Algorithm in WiFi Indoor Positioning. In Proceedings of the 6th China Satellite Navigation Conference, Xi’an, China, 13–15 May 2015; pp. 517–524.
- Li, D.; Zhang, B.; Yao, Z.; Li, C. A feature scaling based k-nearest neighbor algorithm for indoor positioning system. In Proceedings of the IEEE Global Communications Conference (IEEE GLOBECOM), Austin, TX, USA, 8–12 December 2014; pp. 436–441.
- Zhou, C.; Xie, H.; Shi, J. WiFi Indoor Location Technology Based on K-Means Algorithm. In Proceedings of the 4th International Conference on Logistics, Informatics and Service Science (LISS 2015), Beijing, China, 23–26 July 2014; pp. 765–770.
- Nikitakik, S.; Tsakalides, P. Localization in wireless networks based on jointly compressed sensing. In Proceedings of the 19th European Signal Processing Conference (IEEE EUSIPCO), Barcelona, Spain, 29 August–2 September 2011; pp. 1809–1813.
- Feng, C.; Au, W.S.A.; Valaee, S.; Tan, Z. Compressive sensing based positioning using RSS of WLAN access points. In Proceedings of the 29th AnnualJoint Conference of the IEEE Computer and Communications Societies (IEEE INFOCOM), San Diego, CA, USA, 14–19 March 2010; pp. 1–9.
- Tian, Z.; Tang, X.; Zhou, M.; Tan, Z. Probability Distribution-Aided Indoor Positioning Algorithm Based on Affinity Propagation Clustering. In Proceedings of the 2nd International Conference on Communications, Signal Processing, and Systems, Tianjin, China, 1–2 September 2013; pp. 911–919.
- Au, A.W.S.; Feng, C.; Valaee, S.; Reyes, S.; Sorour, S.; Markowitz, S.N.; Gold, D.; Gordon, K.; Eizenman, M. Indoor tracking and navigation using received signal strength and compressive sensing on a mobile device. IEEE Trans. Mob. Comput. 2013, 12, 2050–2062. [Google Scholar] [CrossRef]
- Miao, H.; Wang, Z.; Wang, J.; Zhang, L.; Liu, Z. A novel access point selection strategy for indoor location with WiFi. In Proceedings of the 26th Chinese Control and Decision Conference (IEEE CCDC), Changsha, China, 31 May–2 June 2014; pp. 5260–5265.
- Li, R.; Zhao, Z.; Zhang, Y.; Palicot, J. Adaptive multi-task compressive sensing for localization in wireless local area networks. IET Commun. 2014, 8, 1736–1744. [Google Scholar] [CrossRef]
- Ferris, B.; Fox, D.; Lawrence, N.D. WiFi-SLAM Using Gaussian Process Latent Variable Models. In Proceedings of the 20th International Joint Conference on Artificial Intelligence (IJCAI), Hyderabad, India, 6–12 January 2007; pp. 2480–2485.
- Huang, J.; Millman, D.; Quigley, M.; Stavens, D.; Thrun, S.; Aggarwal, A. Efficient, generalized indoor wifi graphslam. In Proceedings of the IEEE International Conference on Robotics and Automation (IEEE ICRA), Shanghai, China, 9–13 May 2011; pp. 1038–1043.
- Priyantha, N.B.; Chakraborty, A.; Balakrishnan, H. The cricket location-support system. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking (ACM MOBICOM), Boston, MA, USA, 6–11 August 2000; pp. 32–43.
- Niculescu, D.; Nath, B. VOR base stations for indoor 802.11 positioning. In Proceedings of the 10th Annual International Conference on Mobile Computing and Networking (ACM MOBICOM), Philadelphia, PA, USA, 26 September–1 October 2004; pp. 58–69.
- Jayabharathy, R.; Varadarajan, R.; Prithiviraj, V. Performance Comparison of UWB and WiFi Based Indoor Localization Using TDOA. J. Appl. Sci. 2014, 14, 1564–1569. [Google Scholar] [CrossRef]
- Kai, Z.; Binghao, L.; Dempster, A. A performance evaluation of the RFID method in indoor positioning fingerprinting database collection and maintenance. In Proceedings of the 2013 International Global Navigation Satellite Systems Society IGNSS Symposium, Gold Coast, Australia, 16–18 July 2013.
- Chieh, K.S.; Keong, N.Y.; Burhan, M.F.; Balasubramaniam, N.; Din, N.M. ZigBee environment for indoor localization. In Proceedings of the 4th International Conference on Engineering Technology and Technopreneuship (IEEE ICE2T), Kuala Lumpur, Malaysia, 27–29 August 2014; pp. 152–155.
- Ahn, H.C.; Rhee, S.B. Simulation of a RSSI-based indoor localization system using wireless sensor network. In Proceedings of the 5th International Conference on Ubiquitous Information Technologies and Applications (IEEE CUTE), Sanya, China, 16–18 December 2010; pp. 1–4.
- Laitinen, E.; Lohan, E.S.; Talvitie, J.; Shrestha, S. Access point significance measures in WLAN-based location. In Proceedings of the Ninth Workshop on Positioning Navigation and Communication (IEEE WPNC), Dresden, Germany, 15–16 March 2012; pp. 24–29.
- Chang, Q.; Velde, S.V.D.; Wang, W.; Li, Q.; Hou, H.; Heidi, S. WiFi Fingerprint Positioning Updated by Pedestrian Dead Reckoning for Mobile Phone Indoor Localization. In Proceedings of the 6th China Satellite Navigation Conference, Xi’an, China, 13–15 May 2015; pp. 729–739.
- Park, G.Y.; Jeon, M.H.; Oh, C.H. Indoor wireless localization using kalman filtering in fingerprinting-based location estimation system. Int. J. Softw. Eng. Its Appl. 2014, 8, 235–246. [Google Scholar] [CrossRef]
- Wang, B.; Zhou, S.; Yang, L.T.; Mo, Y. Indoor Positioning via Subarea Fingerprinting and Surface Fitting with Received Signal Strength. Pervasive Mob. Comput. 2015, 23, 23–48. [Google Scholar] [CrossRef]
- Wang, B.; Zhou, S.; Liu, W.; Mo, Y. Indoor Localization Based on Curve Fitting and Location Search Using Received Signal Strength. IEEE Trans. Ind. Electron. 2015, 62, 572–582. [Google Scholar] [CrossRef]
- Wang, B.; Chen, Q.; Yang, L.T.; Chao, H. Indoor Smartphone Localization via Fingerprint Crowdsourcing: Challenges and Approaches. IEEE Wirel. Commun. 2016, 23, 82–89. [Google Scholar] [CrossRef]
- Scholkopf, B.; Platt, J.; Hofmann, T. Sparse Representation for Signal Classification. Adv. Neural Inf. Process. Syst. 2006, 19, 609–616. [Google Scholar]
- Olshausen, B.A.; Field, D.J. Sparse coding with an overcomplete basis set: A strategy employed by V1? Vis. Res. 1997, 37, 3311–3325. [Google Scholar] [CrossRef]
- Wang, J.; Tang, S.; Yin, B.; Li, X. Data gathering in wireless sensor networks through intelligent compressive sensing. In Proceedings of the 31st IEEE International Conference on Computer Communications (IEEE INFOCOM), Orlando, FL, USA, 25–30 March 2012; pp. 603–611.
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed optimization and statistical learning via the alternating direction method of multipliers. Found. Trends Mach. Learn. 2011, 3, 1–122. [Google Scholar] [CrossRef]
- Bach, F.; Jenatton, R.; Mairal, J.; Obozinski, G. Convex optimization with sparsity-inducing norms. Optim. Mach. Learn. 2011, 5, 19–53. [Google Scholar]
- Efficient l1/lq Norm Regularization. Available online: https://arxiv.org/abs/1009.4766 (accessed on 20 October 2016).
- Lin, Z.; Liu, R.; Li, H. Linearized alternating direction method with parallel splitting and adaptive penalty for separable convex programs in machine learning. Mach. Learn. 2015, 99, 287–325. [Google Scholar] [CrossRef]
- Hu, Y.; Zhou, W.; Wen, Z.; Sun, Y.; Yin, B. Efficient radio map construction based on low-rank approximation for indoor positioning. Math. Probl. Eng. 2013, 2013, 461089. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | KNN | B-SR | CS | T-SR | S-SR | ST-SR |
|---|---|---|---|---|---|---|
| Line | 0.861 ± 0.572 | 1.124 ± 0.631 | 0.733 ± 0.563 | 0.814 ± 0.356 | 1.099 ± 0.685 | 0.693 ± 0.395 |
| “8” | 0.947 ± 0.546 | 1.374 ± 0.851 | 0.782 ± 0.550 | 0.744 ± 0.413 | 1.313 ± 0.897 | 0.721 ± 0.409 |
| Snake | 1.087 ± 0.598 | 1.452 ± 0.850 | 0.831 ± 0.599 | 0.877 ± 0.446 | 1.384 ± 0.849 | 0.796 ± 0.389 |
| Circle | 1.115 ± 0.600 | 1.448 ± 0.823 | 0.703 ± 0.512 | 0.710 ± 0.430 | 1.425 ± 0.775 | 0.630 ± 0.278 |
| Average | 1.002 ± 0.573 | 1.349 ± 0.706 | 0.762 ± 0.556 | 0.786 ± 0.411 | 1.372 ± 0.776 | 0.710 ± 0.368 |
| Methods | KNN | B-SR | CS | T-SR | S-SR | ST-SR |
|---|---|---|---|---|---|---|
| Large quadrangle | 2.420 ± 1.764 | 2.090 ± 1.905 | 1.881 ± 1.648 | 1.648 ± 1.137 | 1.942 ± 1.865 | 1.560 ± 1.022 |
| Quadrangle 1 | 2.198 ± 1.402 | 1.882 ± 2.268 | 1.574 ± 1.052 | 1.426 ± 1.049 | 1.826 ± 2.097 | 1.245 ± 0.710 |
| Quadrangle 2 | 3.834 ± 3.076 | 2.461 ± 2.044 | 2.392 ± 1.861 | 2.044 ± 1.719 | 2.066 ± 1.685 | 1.845 ± 1.366 |
| “∞” | 2.328 ± 2.161 | 1.975 ± 1.898 | 1.822 ± 1.774 | 1.830 ± 1.575 | 1.944 ± 1.752 | 1.725 ± 1.513 |
| Average | 2.695 ± 2.101 | 2.102 ± 2.029 | 1.917 ± 1.584 | 1.737 ± 1.370 | 1.695 ± 1.850 | 1.595 ± 1.153 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Piao, X.; Zhang, Y.; Li, T.; Hu, Y.; Liu, H.; Zhang, K.; Ge, Y. RSS Fingerprint Based Indoor Localization Using Sparse Representation with Spatio-Temporal Constraint. Sensors 2016, 16, 1845. https://doi.org/10.3390/s16111845
Piao X, Zhang Y, Li T, Hu Y, Liu H, Zhang K, Ge Y. RSS Fingerprint Based Indoor Localization Using Sparse Representation with Spatio-Temporal Constraint. Sensors. 2016; 16(11):1845. https://doi.org/10.3390/s16111845
Chicago/Turabian StylePiao, Xinglin, Yong Zhang, Tingshu Li, Yongli Hu, Hao Liu, Ke Zhang, and Yun Ge. 2016. "RSS Fingerprint Based Indoor Localization Using Sparse Representation with Spatio-Temporal Constraint" Sensors 16, no. 11: 1845. https://doi.org/10.3390/s16111845
APA StylePiao, X., Zhang, Y., Li, T., Hu, Y., Liu, H., Zhang, K., & Ge, Y. (2016). RSS Fingerprint Based Indoor Localization Using Sparse Representation with Spatio-Temporal Constraint. Sensors, 16(11), 1845. https://doi.org/10.3390/s16111845