Simultaneous Life Detection and Localization Using a Wideband Chaotic Signal with an Embedded Tone

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Radar System and Its Principles
2.1. The Transmitted Signal
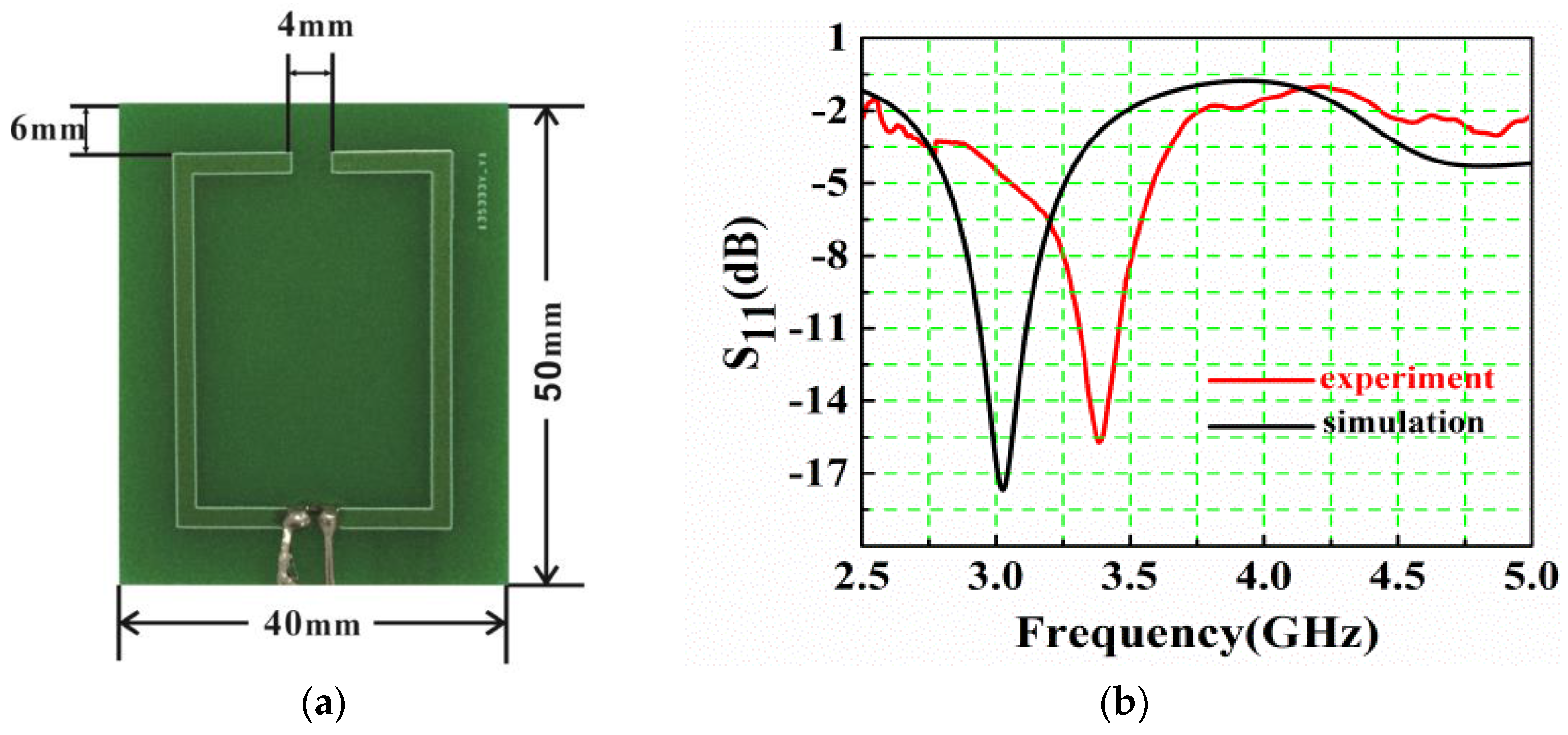
2.2. On-Chip Split-Ring Based Sensor
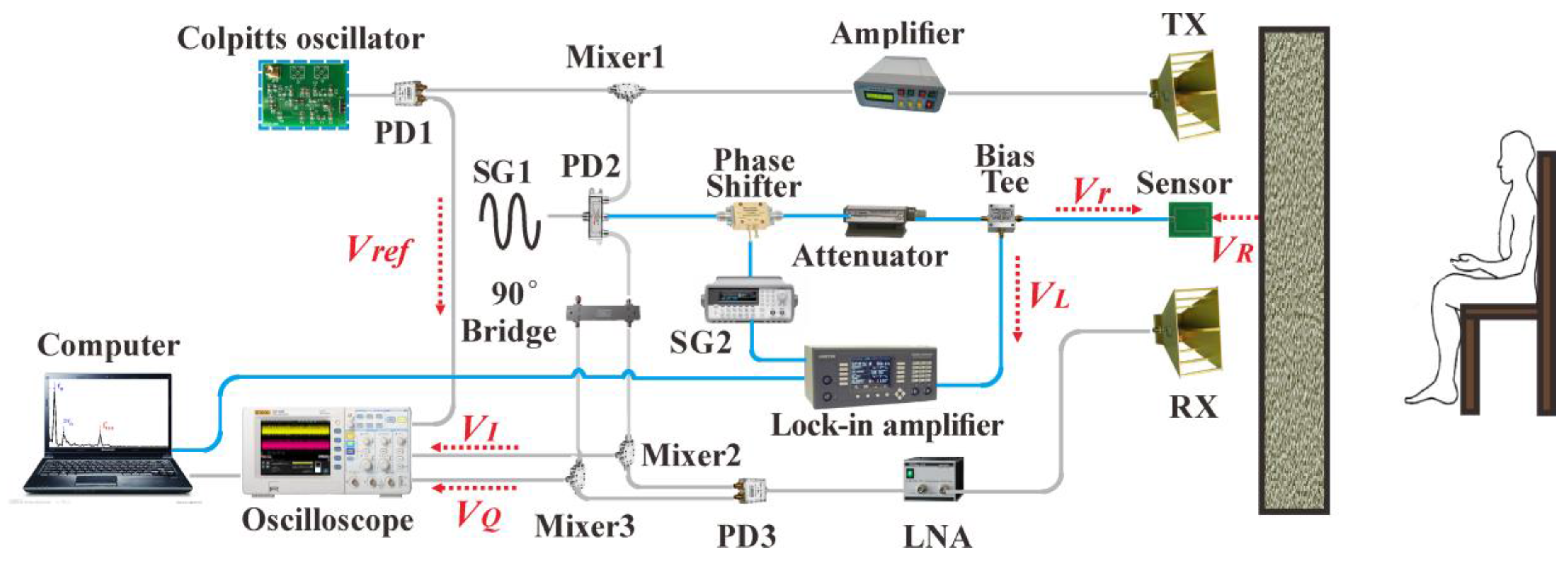
2.3. Experimental Setup
2.4. Principles
3. Experimental Results
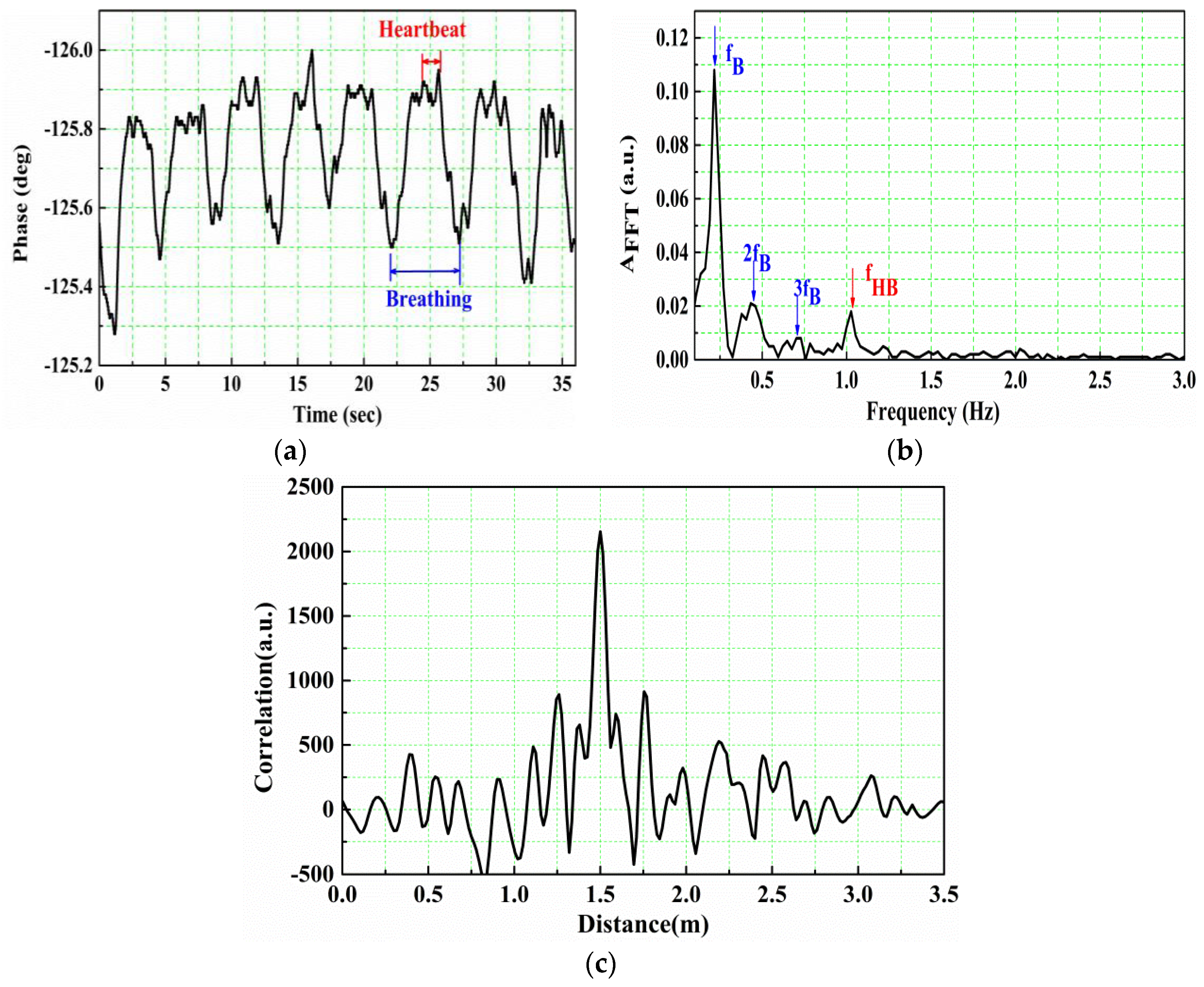
3.1. Human Detection and Ranging in Free Space
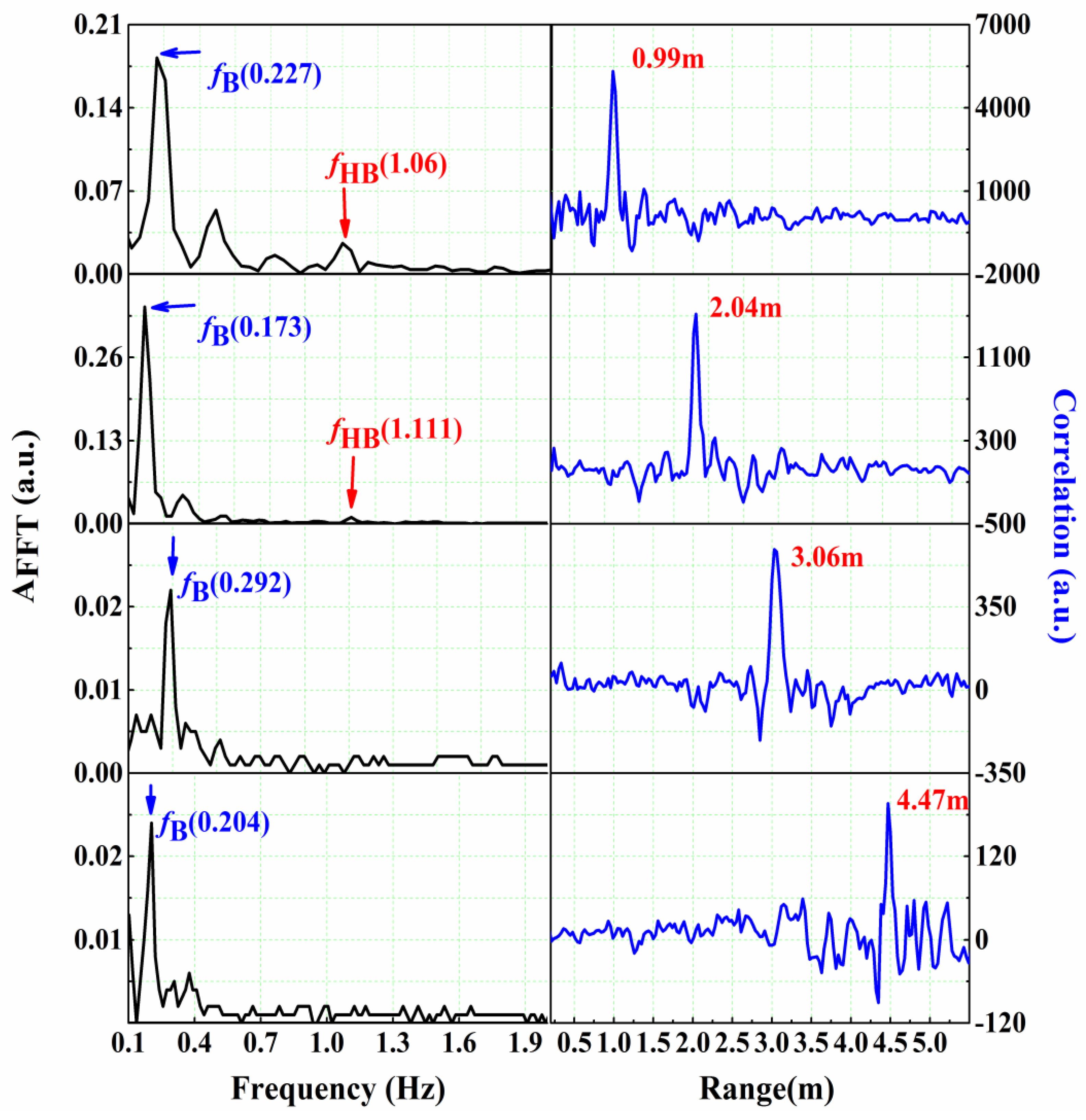
3.2. Human Detection and Ranging in Through-Wall Scenarios
3.3. The Dynamic Range Analysis
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chen, K.M.; Huang, Y.; Zhang, J.P.; Norman, A. Microwave life-detection system for searching human subjects under earthquake rubble or behind barrier. IEEE Trans. Biomed. Eng. 2000, 47, 105–114. [Google Scholar] [CrossRef]
- Bimpas, M.; Paraskevopoulos, N.; Nikellis, K.; Economou, D.; Uzunoglu, N.K. Development of a three band radar system for detecting trapped alive humans under building ruins. Prog. Electromagn. Res. 2004, 49, 161–188. [Google Scholar] [CrossRef]
- JalaliBidgoli, F.; Moghadami, S.; Ardalan, S. A Compact Portable Microwave Life-Detection Device for Finding Survivors. IEEE Embedded Syst. Lett. 2016, 8, 10–13. [Google Scholar] [CrossRef]
- Bond, E.J.; Li, X.; Hagness, S.C.; van Veen, B.D. Microwave imaging via space-time beamforming for early detection of breast cancer. IEEE Trans. Antennas Propag. 2003, 51, 1690–1705. [Google Scholar] [CrossRef]
- Geisheimer, J.; Greneker, E.F. A non-contact lie detector using radar vital signs monitor (RVSM) technology. IEEE Aerosp. Electron. Syst. Mag. 2001, 16, 10–14. [Google Scholar] [CrossRef]
- Sraderini, E.M. UWB radars in medicine. IEEE Aerosp. Electron. Syst. Mag. 2002, 1, 13–18. [Google Scholar] [CrossRef]
- Gennarelli, G.; Ludeno, G.; Soldovieri, F. Real-Time Through-Wall Situation Awareness Using a Microwave Doppler Radar Sensor. Remote Sens. 2016, 8, 621. [Google Scholar] [CrossRef]
- Li, C.; Chen, F.; Qi, F.; Liu, M.; Li, Z.; Liang, F.L.; Jing, X.J.; Lu, G.H.; Wang, J.Q. Searching for survivors through random human-body movement outdoors by continuous-wave radar array. PLoS ONE 2016, 11, e0152201. [Google Scholar] [CrossRef]
- Vivet, D.; Checchin, P.; Chapuis, R. Localization and Mapping Using Only a Rotating FMCW Radar Sensor. Sensors 2013, 13, 4527–4552. [Google Scholar] [CrossRef]
- Tessmann, A.; Kudszus, S.; Feltgen, T.; Riessle, M.; Sklarczyk, C.; Haydl, W.-H. Compact single-chip W-band FMCW radar modules for commercial high-resolution sensor applications. IEEE Trans. Microw. Theory Tech. 2002, 50, 2995–3001. [Google Scholar] [CrossRef]
- Liu, L.; Liu, S. Remote detection of human vital sign with stepped-frequency continuous wave radar. IEEE J. Sel. Top. Appl. Earth Obs. 2014, 7, 775–782. [Google Scholar] [CrossRef]
- Ren, L.; Wang, H.; Naishadham, K.; Liu, Q.; Fathy, A.E. Non-invasive detection of cardiac and respiratory rates from stepped frequency continuous wave radar measurements using the state space method. In Proceedings of the 2015 IEEE MTT-S International Microwave Symposium, Phoenix, AZ, USA, 17–22 May 2015; pp. 1–4.
- Lai, J.C.Y.; Xu, Y.; Gunawan, E.; Chua, E.C.P.; Maskooki, A.; Guan, Y.L.; Low, K.S.; Soh, C.B.; Poh, C.L. Wireless sensing of human respiratory parameters by low-power ultrawideband impulse radio radar. IEEE Trans. Instrum. Meas. 2011, 60, 928–938. [Google Scholar] [CrossRef]
- Wu, S.Y.; Tan, K.; Xia, Z.H.; Chen, J.; Meng, S.W.; Fang, G.Y. Improved human respiration detection method via ultra-wideband radar in through-wall or other similar conditions. IET Radar Sonar Navig. 2016, 10, 468–476. [Google Scholar] [CrossRef]
- Gu, C. Short-Range Noncontact Sensors for Healthcare and Other Emerging Applications: A Review. Sensors 2016, 16, 1169. [Google Scholar] [CrossRef]
- Hunt, A.R. Use of a frequency-hopping radar for imaging and motion detection through walls. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1402–1408. [Google Scholar] [CrossRef]
- Su, Y.S.; Chang, C.C.; Guo, J.J.; Chang, S.F. 2-D wireless human subjects positioning system based on respiration detections. In Proceedings of the 2012 IEEE MTT-S International Microwave Symposium, Montreal, QC, Canada, 17–22 June 2012; pp. 1–3.
- Lazaro, A.; Girbau, D.; Villarino, R. Techniques for clutter suppression in the presence of body movements during the detection of respiratory activity through UWB radars. Sensors 2014, 14, 2595–2618. [Google Scholar] [CrossRef]
- Li, J.; Liu, L.B.; Zeng, Z.F.; Liu, F.S. Advanced signal processing for vital sign extraction with applications in UWB radar detection of trapped victims in complex environments. IEEE J. Sel. Top. Appl. Earth Obs. 2014, 7, 783–791. [Google Scholar]
- Nezirovic, A.; Yarovoy, A.G.; Ligthart, L.P. Signal processing for improved detection of trapped victims using UWB radar. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2005–2014. [Google Scholar] [CrossRef]
- Xu, Y.Y.; Wu, S.Y.; Chen, C.; Chen, J.; Fang, G.Y. A novel method for automatic detection of trapped victims by ultrawideband radar. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3132–3142. [Google Scholar] [CrossRef]
- Wang, G.C.; Gu, C.Z.; Inoue, T.; Li, C.Z. Hybrid FMCW-interferometry radar system in the 5.8 GHz ISM band for indoor precise position and motion detection. In Proceedings of 2013 IEEE MTT-S International Microwave Symposium, Seattle, WA, USA, 2–7 June 2013; pp. 1–4.
- Wang, G.; Gu, C.; Inoue, T.; Li, C. A Hybrid FMCW-Interferometry Radar for Indoor Precise Positioning and Versatile Life Activity Monitoring. IEEE Trans. Microw. Theory Tech. 2014, 62, 2812–2822. [Google Scholar] [CrossRef]
- Chen, P.H.; Shastry, M.C.; Lai, C.P.; Narayanan, R.M. A portable real-time digital noise radar system for through-the-wall imaging. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4123–4134. [Google Scholar] [CrossRef]
- Gallagher, K.A.; Narayanan, R.M. Simultaneous human detection and ranging using a millimeter-wave radar system transmitting wideband noise with an embedded tone. In Proceedings of the Radar Sensor Technology XVI, Baltimore, MD, USA, 23–25 April 2012; Volume 8361, p. 836119.
- Gallagher, K.A.; Narayanan, R.M. Human detection and ranging at long range and through light foliage using a W-band noise radar with an embeded tone. In Proceedings of the Radar Sensor Technology XVII, Baltimore, MD, USA, 29 April–1 May 2013; Volume 8714, p. 871402.
- Tarchi, D.; Lukin, K.; Fortuny-Guasch, J.; Mogyla, A.; Vyplavin, P.; Sieber, A. SAR imaging with noise radar. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1214–1225. [Google Scholar] [CrossRef]
- Zhang, Y.; Narayanan, R.M. Design considerations for a real-time random-noise tracking radar. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 434–445. [Google Scholar] [CrossRef]
- Xu, Y.; Narayanan, R.M.; Xu, X.J.; Curtic, J.O. Polarimetric processing of coherent random noise radar data for buried object detection. IEEE Trans. Geosci. Remote Sens. 2001, 39, 467–478. [Google Scholar] [CrossRef]
- Lai, C.P.; Narayanan, R.M. Ultrawideband random noise radar design for through-wall surveillance. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1716–1730. [Google Scholar] [CrossRef]
- Sachs, J.; Helbig, M.; Herrmann, R.; Kmec, M.; Schilling, K.; Zaikov, E. Remote vital sign detection for rescue, security, and medical care by ultra-wideband pseudo-noise radar. Ad Hoc Netw. 2014, 13, 42–53. [Google Scholar] [CrossRef]
- Sachs, J.; Herrmann, R. M-sequence-based ultra-wideband sensor network for vitality monitoring of elders at home. IET Radar Sonar Navig. 2015, 9, 125–137. [Google Scholar] [CrossRef]
- Xia, Z.H.; Fang, G.Y.; Ye, S.B.; Zhang, Q.Y.; Yin, H.J. Design of modulated m-sequence ultrawideband radar for life detection. In Proceedings of the 2014 15th International Conference on Ground Penetrating Radar (GPR), Brussels, Belgium, 30 June–4 July 2014; pp. 960–963.
- Susek, W.; Stec, B. Through-the-wall detection of human activities using a noise radar with microwave quadrature correlator. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 759–764. [Google Scholar] [CrossRef]
- Lin, F.Y.; Liu, J.M. Chaotic radar using nonlinear laser dynamics. IEEE J. Quantum Electron. 2004, 40, 815–820. [Google Scholar] [CrossRef]
- Liu, Z.; Zhu, X.; Hu, W.; Jiang, F. Principles of chaotic signal radar. Int. J. Bifurc. Chaos 2007, 17, 1735–1739. [Google Scholar] [CrossRef]
- Pappu, C.S.; Flores, B.C.; Debroux, P.S.; Verdin, B.; Boehm, J. Synchronisation of bistatic radar using chaotic AM and chaos-based FM waveforms. IET Radar Sonar Navig. 2016. [Google Scholar] [CrossRef]
- Flores, B.C.; Solis, E.A.; Thomas, G. Assessment of chaos based FM signals for range-Doppler imaging. IEEE Proc. Radar Sonar Navig. 2003, 150, 313–322. [Google Scholar] [CrossRef]
- Venkatasubramanian, V.; Leung, H.; Liu, X. Chaos UWB radar for through-the-wall imaging. IEEE Trans. Image Process. 2009, 18, 1255–1265. [Google Scholar] [CrossRef]
- Xie, S.B.; He, Z.S.; Hu, J.F.; Liu, L.D.; Pan, J.C. Performances of improved Tent chaos-based FM radar signal. J. Syst. Eng. Electron. 2012, 23, 385–390. [Google Scholar] [CrossRef]
- Zhang, M.J.; Ji, Y.N.; Wu, Y.; Xu, H.; Xu, W.P. Remote radar based on chaos generation and radio over fiber. IEEE Photon. J. 2014, 6, 79024121. [Google Scholar]
- Cheng, C.H.; Chen, Y.C.; Lin, F.Y. Generation of Uncorrelated Multichannel Chaos by Electrical Heterodyning for Multiple-Input–Multiple-Output Chaos Radar Application. IEEE Photon. J. 2016, 8, 1–14. [Google Scholar] [CrossRef]
- Jiang, T.; Long, J.; Wang, Z.Y.; Qiao, S.; Cui, W.Z.; Ma, W.; Huangfu, J.T.; Ran, L.X. Experimental investigation of a direct chaotic signal radar with colpitts oscillator. J. Electromagn. Wave 2010, 24, 1229–1239. [Google Scholar] [CrossRef]
- Xu, H.; Wang, B.J.; Han, H.; Liu, L.; Li, J.X.; Wang, Y.C.; Wang, A.B. Remote Imaging Radar with Ultra-wideband Chaotic Signals over Fiber Links. Int. J. Bifurc. Chaos 2015, 25, 1530029. [Google Scholar] [CrossRef]
- Tang, H.J.; Kaur, S.; Fu, L.; Yao, B.M.; Li, X.; Gong, H.M.; Gui, Y.S.; Hu, C.M. Life signal detection using an on-chip split-ring based solid state microwave sensor. Appl. Phys. Lett. 2014, 105, 133703. [Google Scholar] [CrossRef]
- Li, J.X.; Wang, Y.C.; Ma, F.C. Experimental demonstration of 1.5 GHz chaos generation usingan improved Colpitts oscillator. Nonlinear Dynam. 2013, 72, 575–580. [Google Scholar] [CrossRef]
- Wirthmann, A.; Fan, X.; Gui, Y.S.; Martens, K.; Williams, G.; Dietrich, J.; Bridges, G.E.; Hu, C.M. Direct phase probing and mapping via spintronic michelson interferometry. Phys. Rev. Lett. 2010, 105, 017202. [Google Scholar] [CrossRef]
- Droitcour, A.D. Non-Contact Measurement of Heart and Respiration Rates with a Single-Chip Microwave Doppler Radar. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2006. [Google Scholar]











© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Guo, C.; Li, J.; Xu, H.; Zhang, J.; Wang, B. Simultaneous Life Detection and Localization Using a Wideband Chaotic Signal with an Embedded Tone. Sensors 2016, 16, 1866. https://doi.org/10.3390/s16111866
Liu L, Guo C, Li J, Xu H, Zhang J, Wang B. Simultaneous Life Detection and Localization Using a Wideband Chaotic Signal with an Embedded Tone. Sensors. 2016; 16(11):1866. https://doi.org/10.3390/s16111866
Chicago/Turabian StyleLiu, Li, Chaoyi Guo, Jingxia Li, Hang Xu, Jianguo Zhang, and Bingjie Wang. 2016. "Simultaneous Life Detection and Localization Using a Wideband Chaotic Signal with an Embedded Tone" Sensors 16, no. 11: 1866. https://doi.org/10.3390/s16111866
APA StyleLiu, L., Guo, C., Li, J., Xu, H., Zhang, J., & Wang, B. (2016). Simultaneous Life Detection and Localization Using a Wideband Chaotic Signal with an Embedded Tone. Sensors, 16(11), 1866. https://doi.org/10.3390/s16111866