
Test of the Practicality and Feasibility of EDoF-Empowered Image Sensors for Long-Range Biometrics



Abstract
:1. Introduction
2. Optical Consideration
2.1. Tradeoff between Resolution and Field-of-View
2.2. Depth of Field
2.3. Irradiation Condition
3. Method to Extend the Depth-of-Field
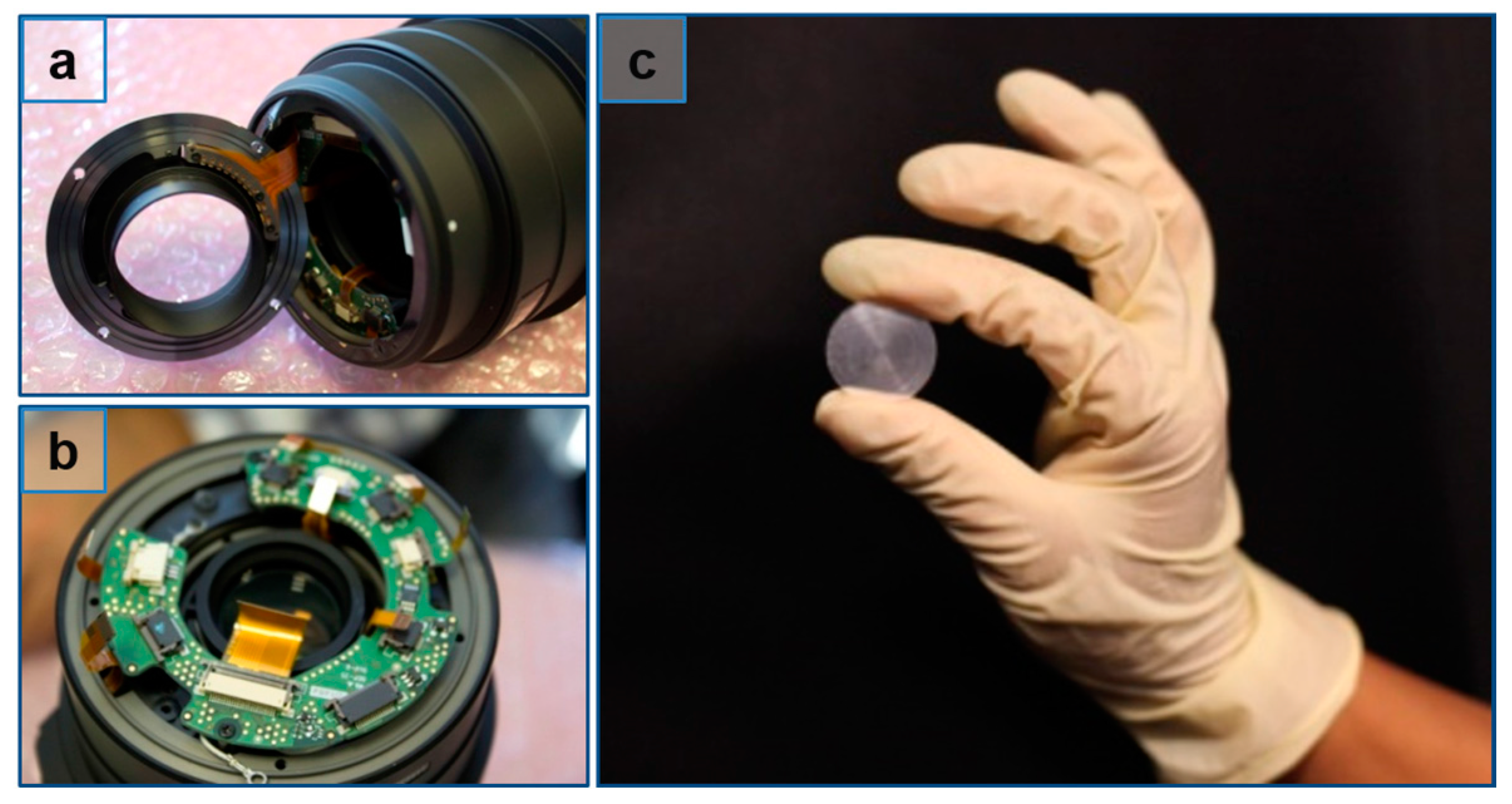
3.1. Wavefront Coding
3.2. Restoration Decoding Process
4. Laboratory Experimentation
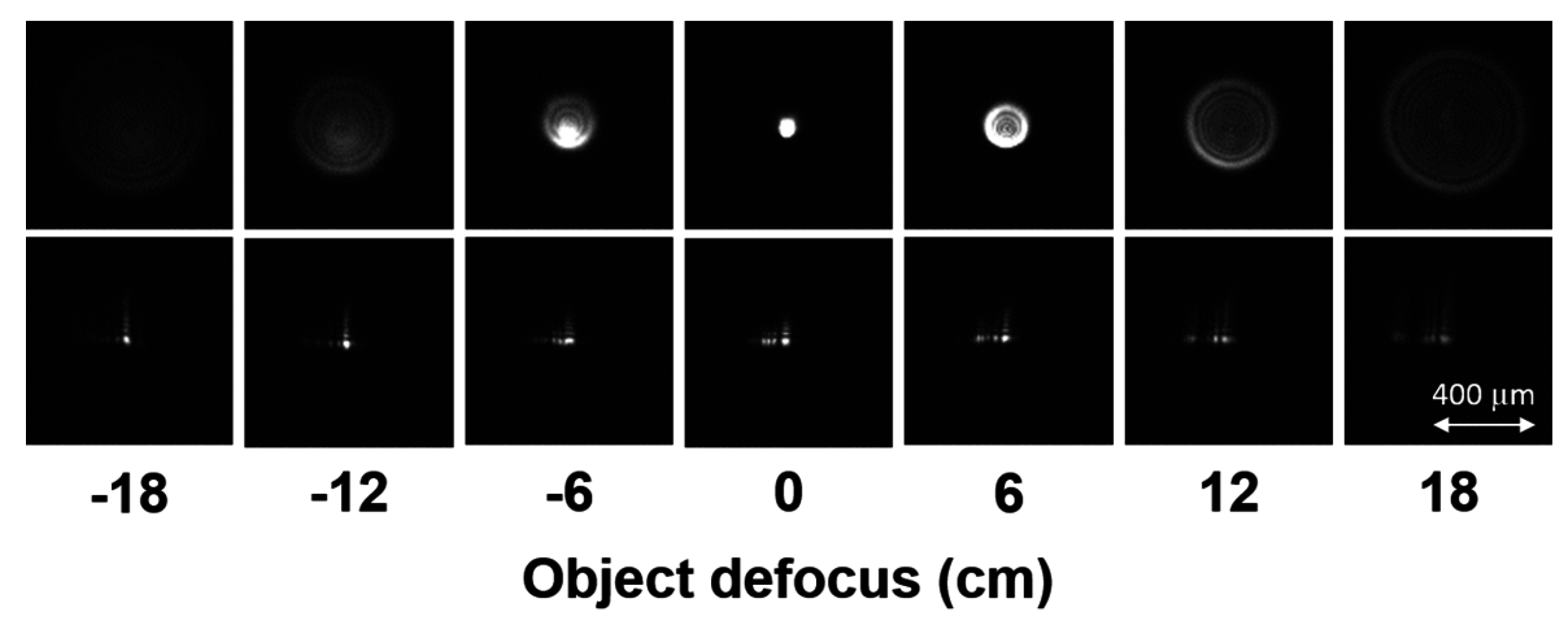
4.1. Optical Quality
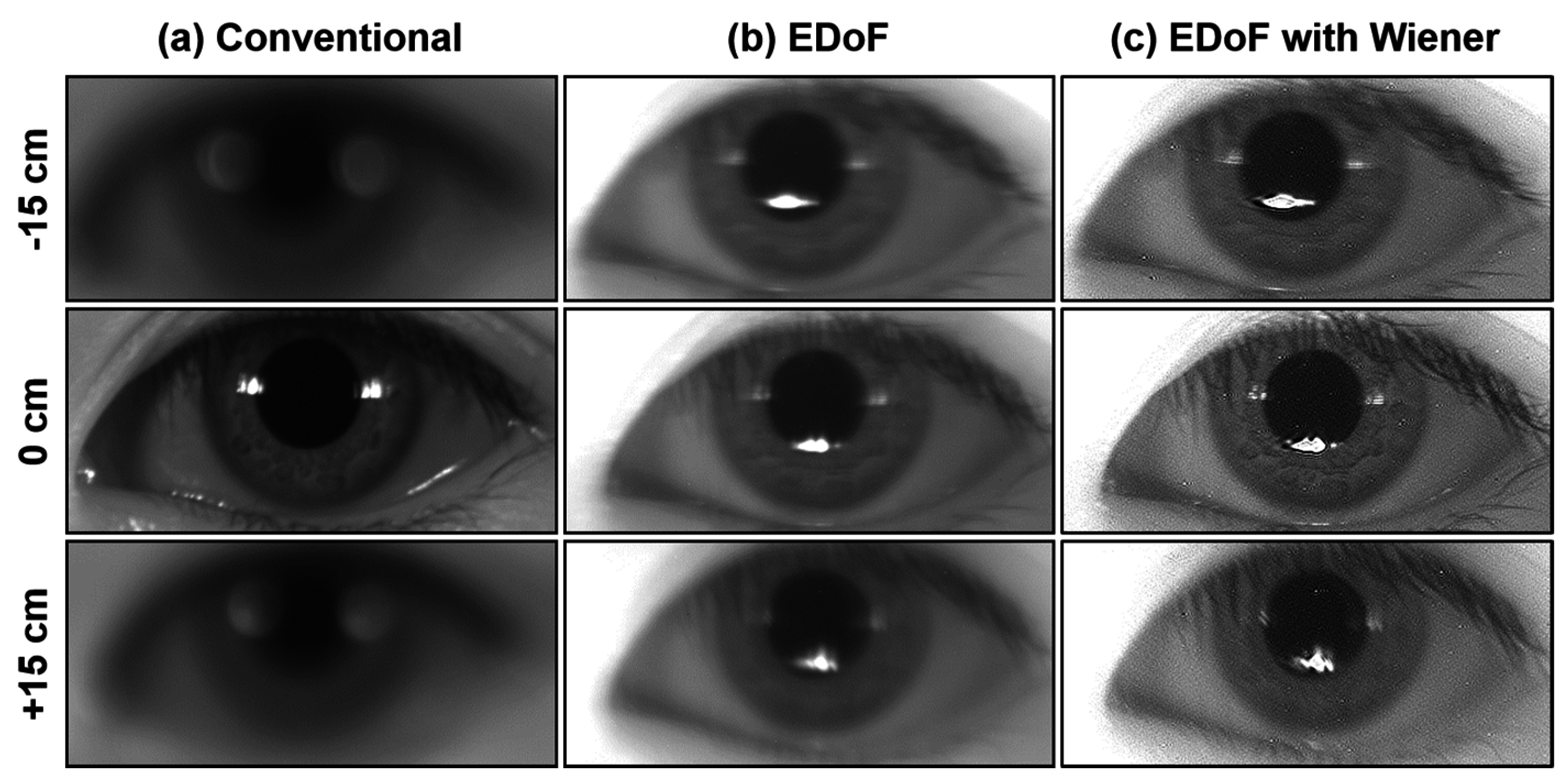
4.2. Image Quality
4.3. Database
4.4. EDoF Performance Evaluation Method
4.5. Different Enrollment/Testing Schemes
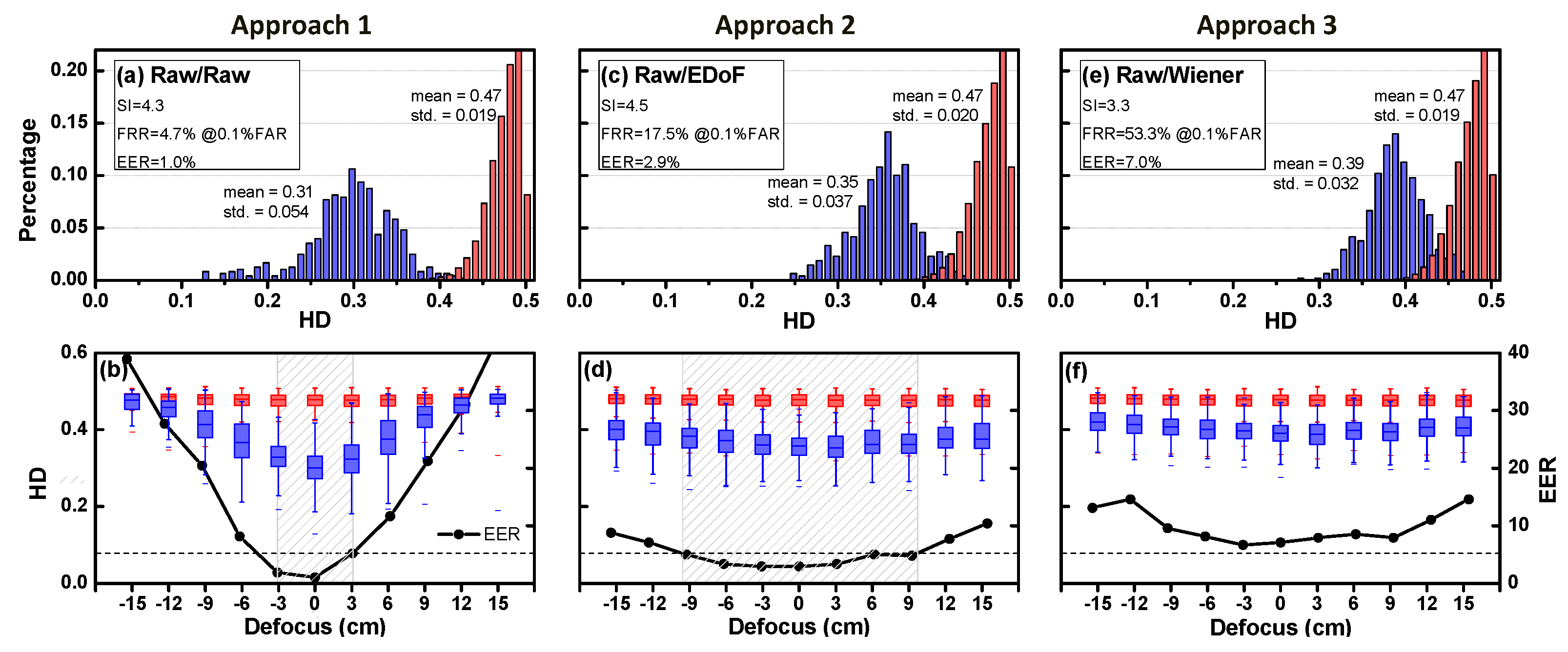
4.5.1. Approach 1: Raw/Raw Pair
4.5.2. Approach 2: Raw/EDoF Pair
4.5.3. Approach 3: Raw/Wiener Pair
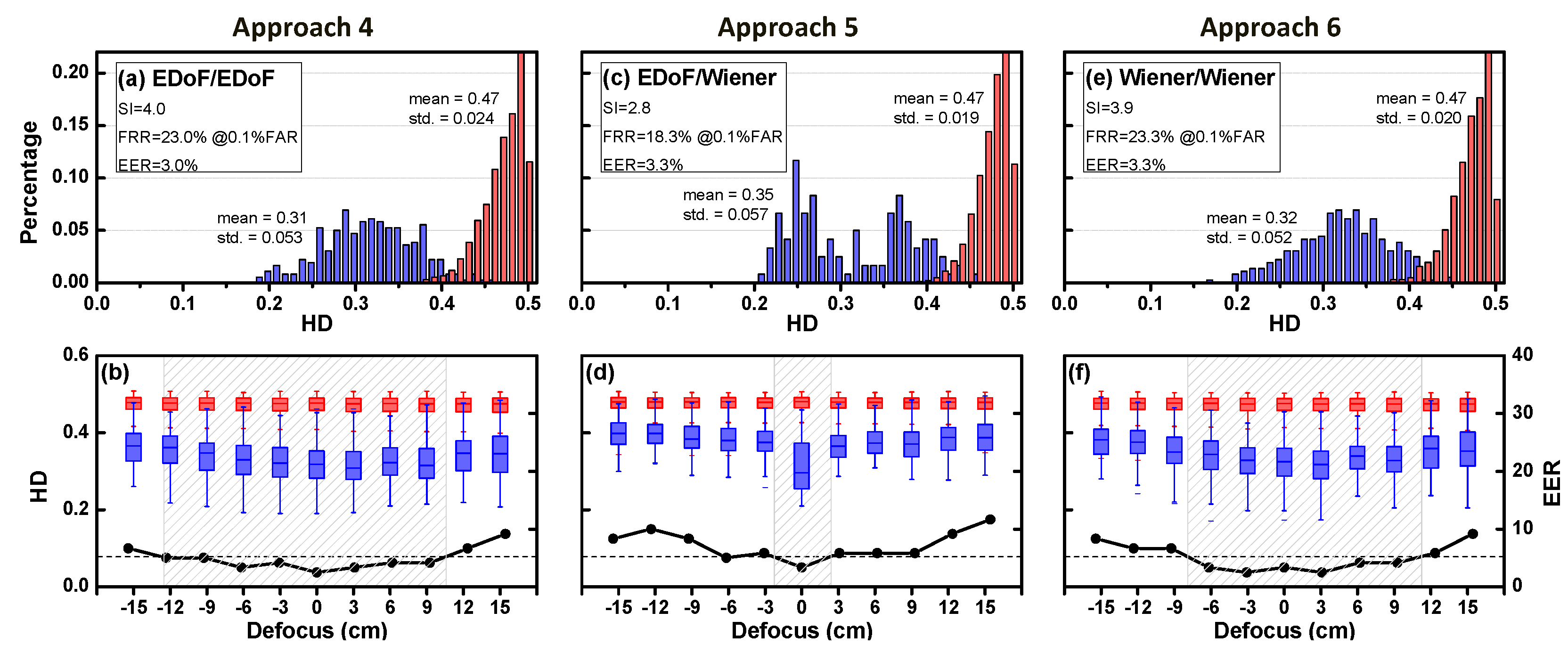
4.5.4. Approach 4: EDoF/EDoF Pair
4.5.5. Approach 5: EDoF/Wiener Pair
4.5.6. Approach 6: Wiener/Wiener Pair
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- AJain, K.; Ross, A.; Prabhakar, S. An introduction to biometric recognition. IEEE Trans. Circuits Syst. Video Technol. 2004, 14, 4–20. [Google Scholar]
- Daugman, J.G. High confidence visual recognition of persons by a test of statistical independence. IEEE Trans. Pattern Anal. Mach. Intell. 1993, 15, 1148–1161. [Google Scholar] [CrossRef]
- Daugman, J.G. The importance of being random: Statistical principles of iris recognition. Pattern Recognit. 2003, 36, 279–291. [Google Scholar] [CrossRef]
- Bowyer, K.; Hollingsworth, K.; Flynn, P.J. Image understanding for iris biometrics: A survey. Comput. Vis. Image Underst. 2008, 110, 181–307. [Google Scholar] [CrossRef]
- Camus, T.A.; Wildes, R.P. Reliable and Fast Eye Finding in Close-up Images. In Proceedings of the 16th International Conference on Pattern Recognition, Quebec City, QC, Canada, 11–15 August 2002; Volume 1, pp. 389–394.
- Daugman, J.G. How iris recognition works. IEEE Trans. Circuits Syst. Video Technol. 2004, 14, 21–30. [Google Scholar] [CrossRef]
- Van der Gracht, J.; Pauca, V.P.; Setty, H.; Narayanswamy, R.; Plemmons, R.J.; Prasad, S.; Torgersen, T. Iris Recognition with Enhanced Depth-of-Field Image Acquisition. In Visual Information Processing XIII; Society of Photo Optical: Bellingham, WA, USA, 2004; Volume 5438, pp. 120–129. [Google Scholar]
- Narayanswamy, R.; Johnson, G.E.; Silveira, P.E.X.; Wach, H.B. Extending the imaging volume for biometric iris recognition. Appl. Opt. 2005, 44, 701–712. [Google Scholar] [CrossRef] [PubMed]
- Smith, K.N.; Pauca, V.P.; Ross, A.; Torgersen, T.; King, M.C. Extended Evaluation of Simulated Wavefront Coding Technology in Iris Recognition. In Proceedings of the First IEEE International Conference on Biometrics: Theory, Applications, and Systems, Washington, DC, USA, 27–29 September 2007; pp. 259–265.
- Barwick, D.S. Increasing the information acquisition volume in iris recognition systems. Appl. Opt. 2008, 47, 4684–4691. [Google Scholar] [CrossRef] [PubMed]
- Boddeti, V.N.; Kumar, B.V.K.V. Extended-depth-of-field iris recognition using unrestored wavefront-coded imagery. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2010, 40, 495–508. [Google Scholar] [CrossRef]
- Matey, J.R.; Naroditsky, O.; Hanna, K.; Kolczynski, R.; Lolacono, D.J.; Mangru, S.; Tinker, M.; Zappia, T.M.; Zhao, W.Y. Iris on the move: Acquisition of images for iris recognition in less constrained environments. Proc. IEEE 2006, 94, 1936–1947. [Google Scholar] [CrossRef]
- ISO/IEC 19794–6:2005. Information Technology—Biometric Data Interchange Formats—Part 6: Iris Image Data. Available online: http://www.iso.org/iso/catalogue_detail.htm?csnumber=38750 (accessed on 23 November 2016).
- Forrester, J.V.; Dick, A.D.; McMenamin, P.G.; Lee, W. The Eye: Basic Sciences in Practice, 2nd ed.; Saunders: London, UK, 2001. [Google Scholar]
- Smith, W.J. Modern Optical Engineering: The Design of Optical System, 4th ed.; McGraw-Hill: New York, NY, USA, 2008. [Google Scholar]
- Boyce, C.; Ross, A.; Monaco, M.; Hornak, L.; Li, X. Multispectral Iris Analysis: A Preliminary Study51. In Proceedings of the Conference on Computer Vision and Pattern Recognition Workshop, CVPRW’06, New York, NY, USA, 17–22 June 2006.
- Lian, Z. Miniming Specular Reflections of the Iris Image Acquisition System. Master’s Thesis, National Chiao Tung University, Hsinchu, Taiwan, 2014. [Google Scholar]
- Stamnes, J.J. Waves in Focal Regions: Propagation: Diffraction, and Focusing of Light, Sounds, and Water Waves; CRC Press: Boca Raton, FL, USA, 1986. [Google Scholar]
- Takahashi, Y.; Komatsu, S. Optimized free-form phase mask for extension of depth of field in wavefront-coded imaging. Opt. Lett. 2008, 33, 1515–1517. [Google Scholar] [CrossRef] [PubMed]
- Dowski, E.R.; Cathey, W.T. Extended depth of field through wave-front coding. Appl. Opt. 1995, 34, 1859–1866. [Google Scholar] [CrossRef] [PubMed]
- Ojeda-Castaneda, J.; Tepichin, E.; Diaz, A. Arbitrarily high focal depth with quasioptimum real and positive transmittance apodizer. Appl. Opt. 1989, 28, 2666–2670. [Google Scholar] [CrossRef] [PubMed]
- Bagheri, S.; Silveira, P.E.X.; Barbastathis, G. Signal-to-noise-ratio limit to the depth-of-field extension for imaging systems with an arbitrary pupil function. J. Opt. Soc. Am. A-Opt. Image Sci. Vis. 2009, 26, 895–908. [Google Scholar] [CrossRef] [PubMed]
- Sherif, S.S.; Dowski, E.R.; Cathey, W.T. A Logarithmic Phase Filter to Extend the Depth of Field of Incoherent Hybrid Imaging Systems. Int. Symp. Opt. Sci. Technol. 2001, 4471, 272–280. [Google Scholar]
- Kubala, K.; Dowski, E.R.; Kobus, J.; Brown, R. Design and Optimization of Aberration and Error Invariant Space Telescope Systems. In Proceedings of the SPIE 40th Annual Meeting Optical Science and Technology, Denver, CO, USA, 2–6 August 2004; Volume 5524, pp. 54–65.
- Chen, Y.-L.; Hsieh, S.-H.; Hung, K.-E.; Yang, S.-W.; Li, Y.-H.; Tien, C.-H. Extended Depth of Field System for Long Distance Iris Acquisition. In Proceedings of the Novel Optical Systems Design and Optimization XV, San Diego, CA, USA, 12–16 August 2012.
- Hsieh, S.-H.; Yang, S.-W.; Li, Y.-H.; Tien, C.-H. Long Distance Iris Recognition System. In Proceedings of the International Conference 2012 Optics and Photonics Taiwan, Taipei, Taiwan, 6–8 December 2012.
- Hsieh, S.-H.; Yang, H.-W.; Huang, S.-H.; Li, Y.-H.; Tien, C.-H. Biometric iris image acquisition system with wavefront coding technology. In Proceedings of the International Symposium on Photoelectronic Detection and Imaging 2013: Infrared Imaging and Applications, Beijing, China, 25–27 June 2013; p. 890730.
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2008. [Google Scholar]
- Gonzalez, R.C.; Woods, R.E.; Eddins, S.L. Digital Image Processing Using MATLAB, 2nd ed.; Gatesmark Pub. S.I.: Knoxville, TN, USA, 2009. [Google Scholar]
- Hsieh, S.-H.; Lian, Z.-H.; Chang, C.-M.; Tien, C.-H. The Influence of Phase Mask Position upon EDoF System. In Proceedings of the Novel Optical Systems Design and Optimization XVI, San Diego, CA, USA, 25 August 2013.
- Tan, K.-C.; Lim, H.; Tan, B.T.G. Windowing techniques for image-restoration. Graph. Models Image Process. 1991, 53, 491–500. [Google Scholar] [CrossRef]
- Aghdasi, F.; Ward, R.K. Reduction of boundary artifacts in image restoration. IEEE Trans. Image Process. 1996, 5, 611–618. [Google Scholar] [CrossRef] [PubMed]
- Masek, L.; Kovesi, P. Matlab Source Code for a Biometric Identification System Based on Iris Patterns; The School of Computer Science and Software Engineering, The University of Western Australia: Crawley, Australia, 2003; Volume 2. [Google Scholar]
- Philips, J. Portal Challenge Problem Multiple Biometric Grand Challenge Preliminary Results of Version 2; MBGC 3rd Workshop; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2009.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MV1-D2080 IR Sensor | Sigma APO 150–500 mm | ||
|---|---|---|---|
| Optical Format | 23.5 mm | Field of View | 5–16 degrees |
| Resolution | 2080 × 2080 | Minimum Distance | 220 cm |
| Pixel Size | 8 μm | Maximum Mag. | 1:5.2 |
| Dark current | 0.65 fA/pixel | Caliber Diameter | 86 mm |
| Test Enrollment | Conventional | EDoF | EdoF with Wiener |
|---|---|---|---|
| Conventional | DoF = 6 cm | DoF = 18.4 cm | DoF = 0 cm |
| SI = 4.3 | SI = 4.5 | SI = 3.3 | |
| FRR = 4.7% | FRR = 17.5% | FRR = 53.3% | |
| EER = 1.0% | EER = 2.9% | EER = 7.0% | |
| EdoF | DoF = 22.2 cm | DoF = 4.5 cm | |
| SI = 4.0 | SI = 2.8 | ||
| FRR = 23.0% | FRR = 18.3% | ||
| EER = 3.3% | EER = 3.3% | ||
| EdoF with Wiener | DoF = 18.6 cm | ||
| SI = 3.9 | |||
| FRR = 23.3% | |||
| EER = 3.3% |
| Proposal | Gracht [7] | Narayanswamy [8] | Smith [9] | Barwick [10] | Boddeti [11] | |
|---|---|---|---|---|---|---|
| Scheme | Experiment | Experiment | Simulation | Simulation | Simulation | Simulation |
| Database | Laboratory | Laboratory | Laboratory | ICE | UPOL | ICE |
| 3328 images 64 classes | - | 44 images | 150 images | 168 images | 1061 images | |
| one class | two classes | 50 classes | 56 classes | 61 classes | ||
| Distance | 300 cm | 50 cm | 55 cm | 50 cm | 55 cm | - |
| Optics | f = 400 mm | f = 57 mm | f = 50 mm | f = 53 mm | f = 50 mm | - |
| F/6.3 | F/8 | F/3.5 | F/2 | F/2.85 | ||
| λ = 850 nm | λ = 830 nm | λ = 780 nm | λ = 760 nm | λ = 768 nm | ||
| Sensor | 2080 × 2080 | 1300 × 1300 | 1024 × 768 | - | - | - |
| 8 μm | 6.7 μm | - | 5.134 μm | 3 μm | ||
| Wavefront coding | Cubic | Cubic | Cubic | Cubic | Cubic-pentic | Cubic |
| α = 42 | α = 11 | α = 156 | α =30 | (−16, 71, −265, 370, 267) | α = 60 | |
| Restoration | without | with | with | without | without | without |
| Merit function | Accuracy invariant | HD = 0.32 | Iris score 1 set to 0.3 | HD = 0.33 | SI = 5 | Error bars of the authentic and impostor scores do not overlap |
| Extended factor | 3.71 | over 2 | over 3.3 | 2.8 | 2.2 | 4.8 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hsieh, S.-H.; Li, Y.-H.; Tien, C.-H. Test of the Practicality and Feasibility of EDoF-Empowered Image Sensors for Long-Range Biometrics. Sensors 2016, 16, 1994. https://doi.org/10.3390/s16121994
Hsieh S-H, Li Y-H, Tien C-H. Test of the Practicality and Feasibility of EDoF-Empowered Image Sensors for Long-Range Biometrics. Sensors. 2016; 16(12):1994. https://doi.org/10.3390/s16121994
Chicago/Turabian StyleHsieh, Sheng-Hsun, Yung-Hui Li, and Chung-Hao Tien. 2016. "Test of the Practicality and Feasibility of EDoF-Empowered Image Sensors for Long-Range Biometrics" Sensors 16, no. 12: 1994. https://doi.org/10.3390/s16121994
APA StyleHsieh, S. -H., Li, Y. -H., & Tien, C. -H. (2016). Test of the Practicality and Feasibility of EDoF-Empowered Image Sensors for Long-Range Biometrics. Sensors, 16(12), 1994. https://doi.org/10.3390/s16121994