
Aerodynamic Drag Analysis of 3-DOF Flex-Gimbal GyroWheel System in the Sense of Ground Test

Abstract
:1. Introduction
2. Problem Formulation
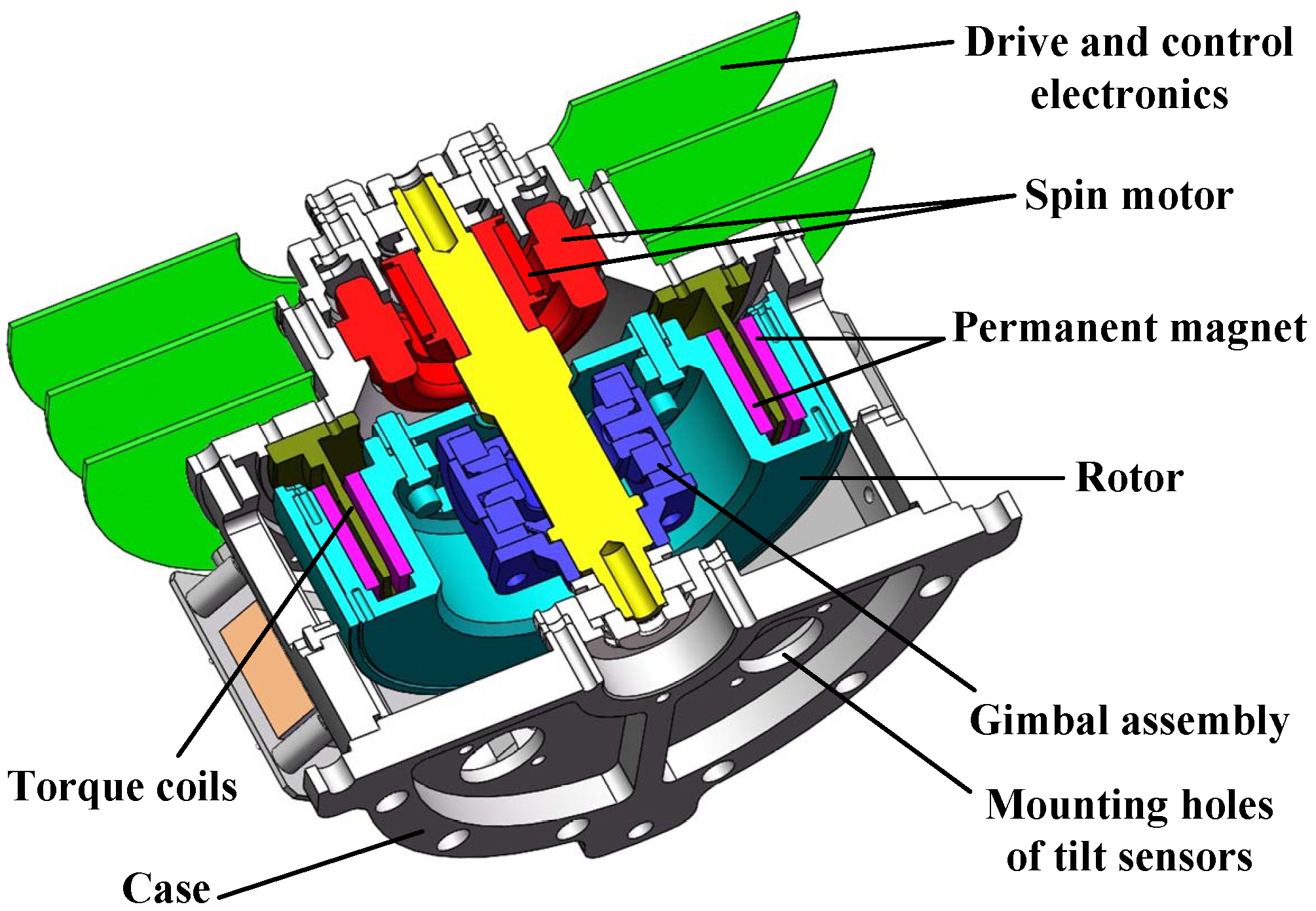
2.1. Description of 3-DOF GyroWheel System
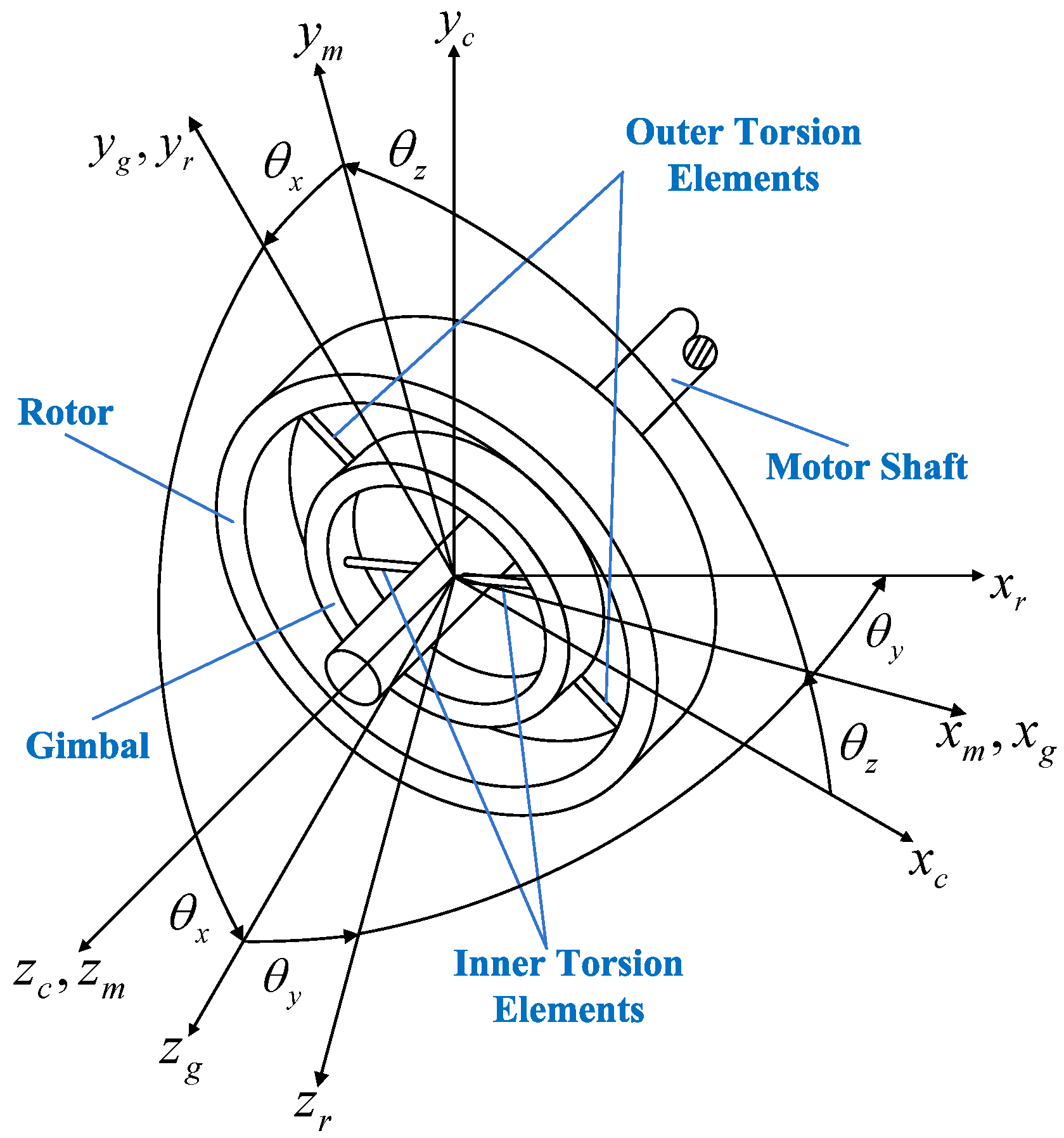
2.1.1. Physical Configuration and Coordinates
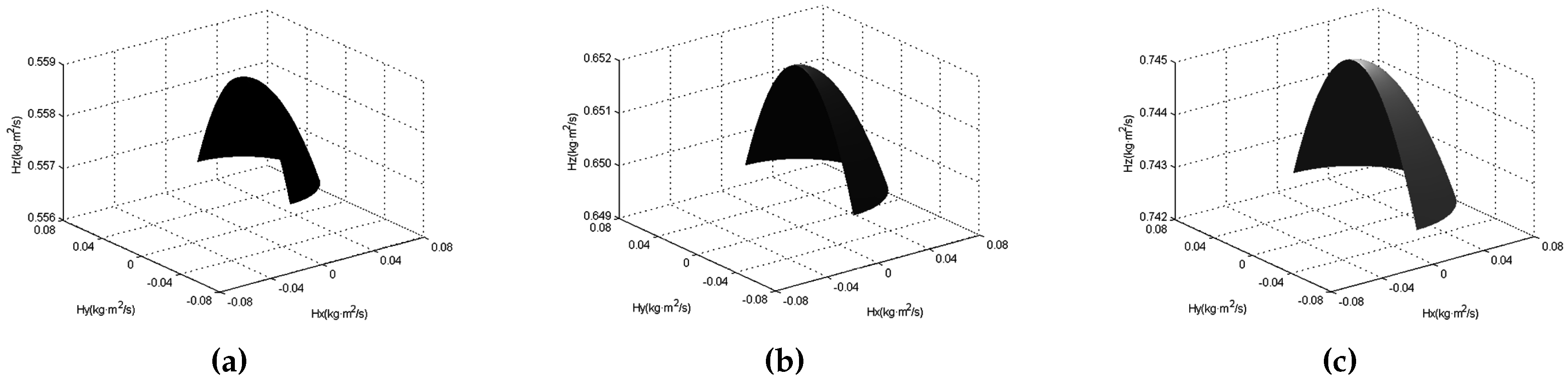
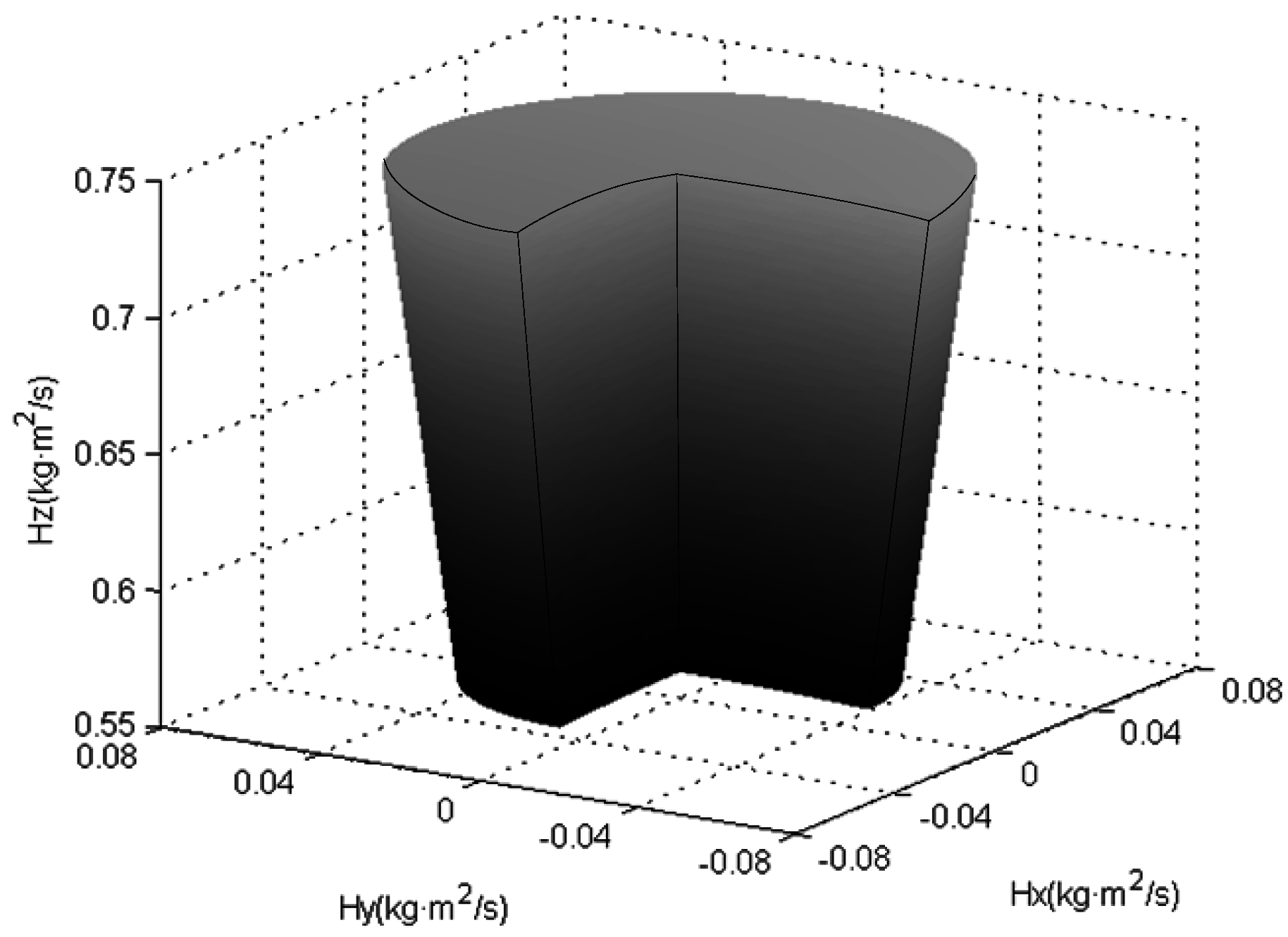
2.1.2. Angular Momentum Envelope
2.2. Dynamical Modeling and Technical Challenge Formulation
3. Numerical Simulations
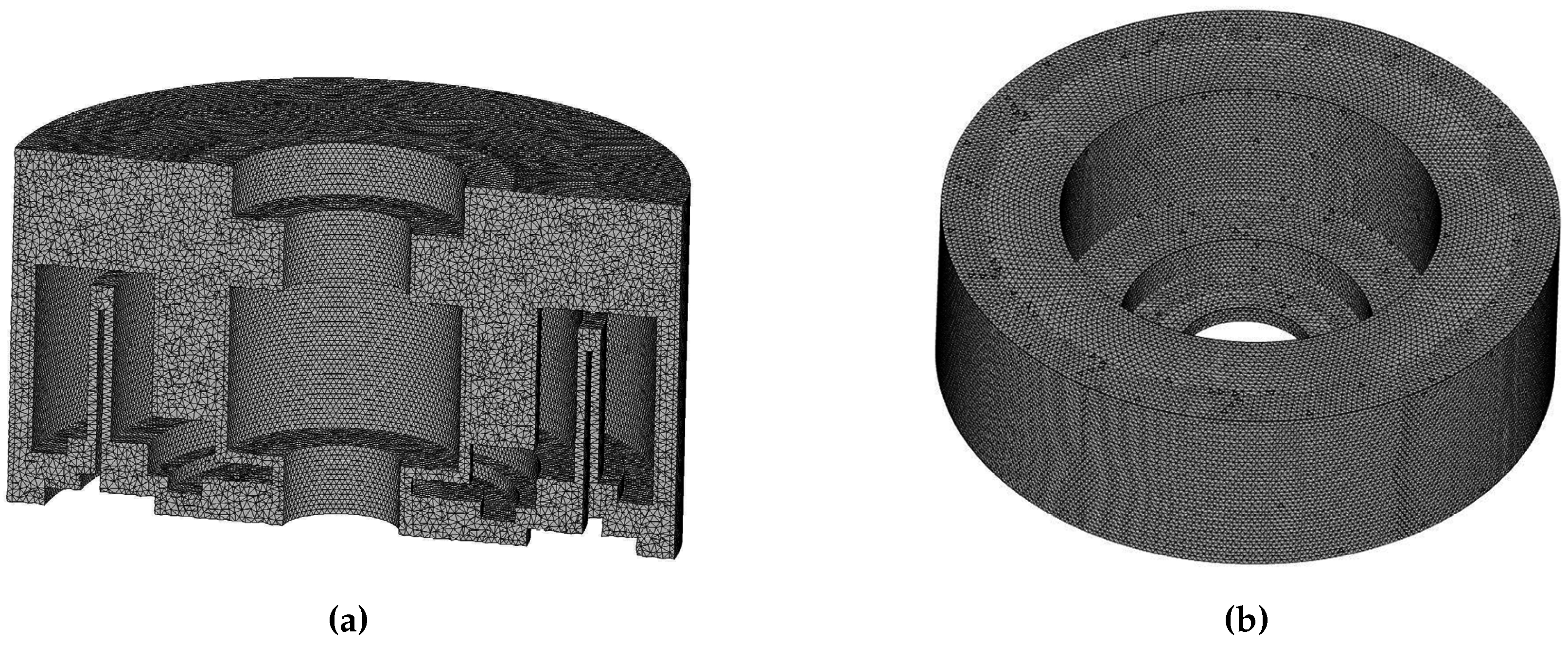
3.1. Numerical Modeling in FLUENT
3.1.1. Model Geometries
3.1.2. Governing Equation
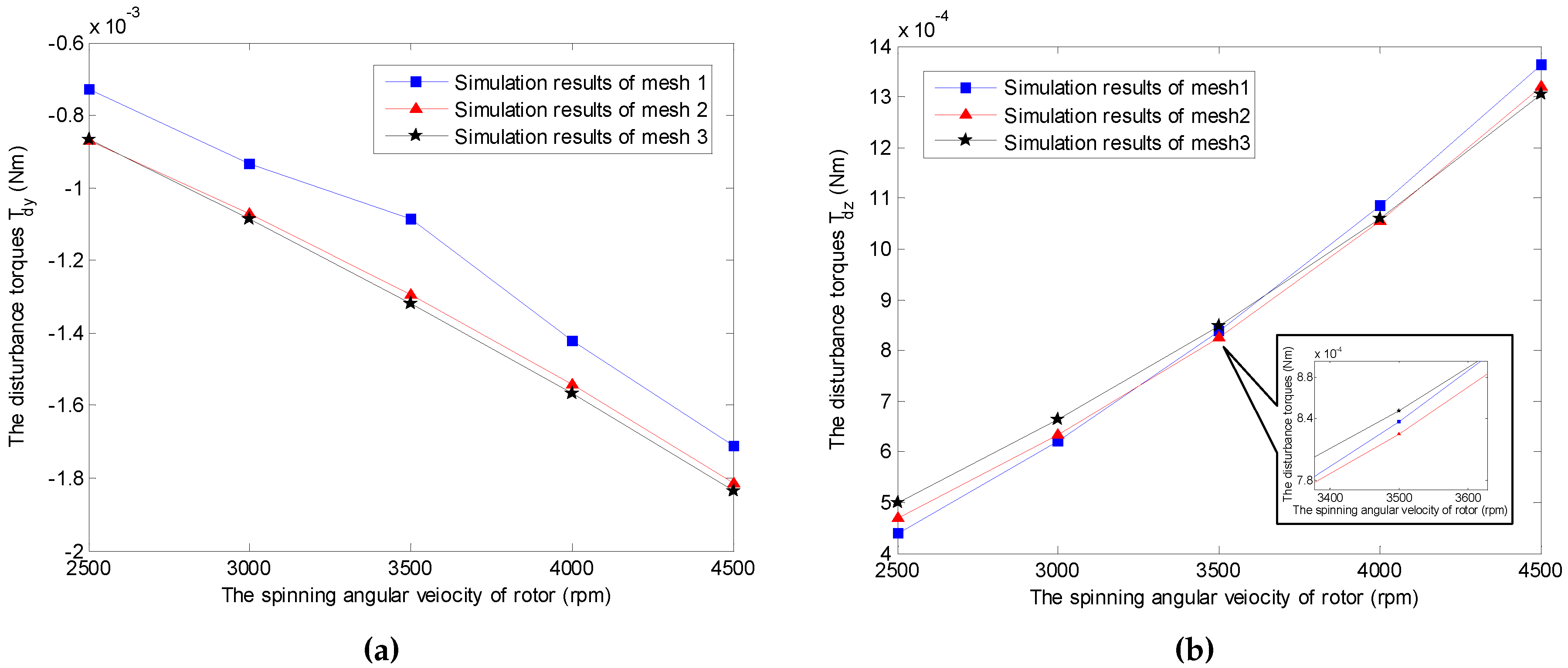
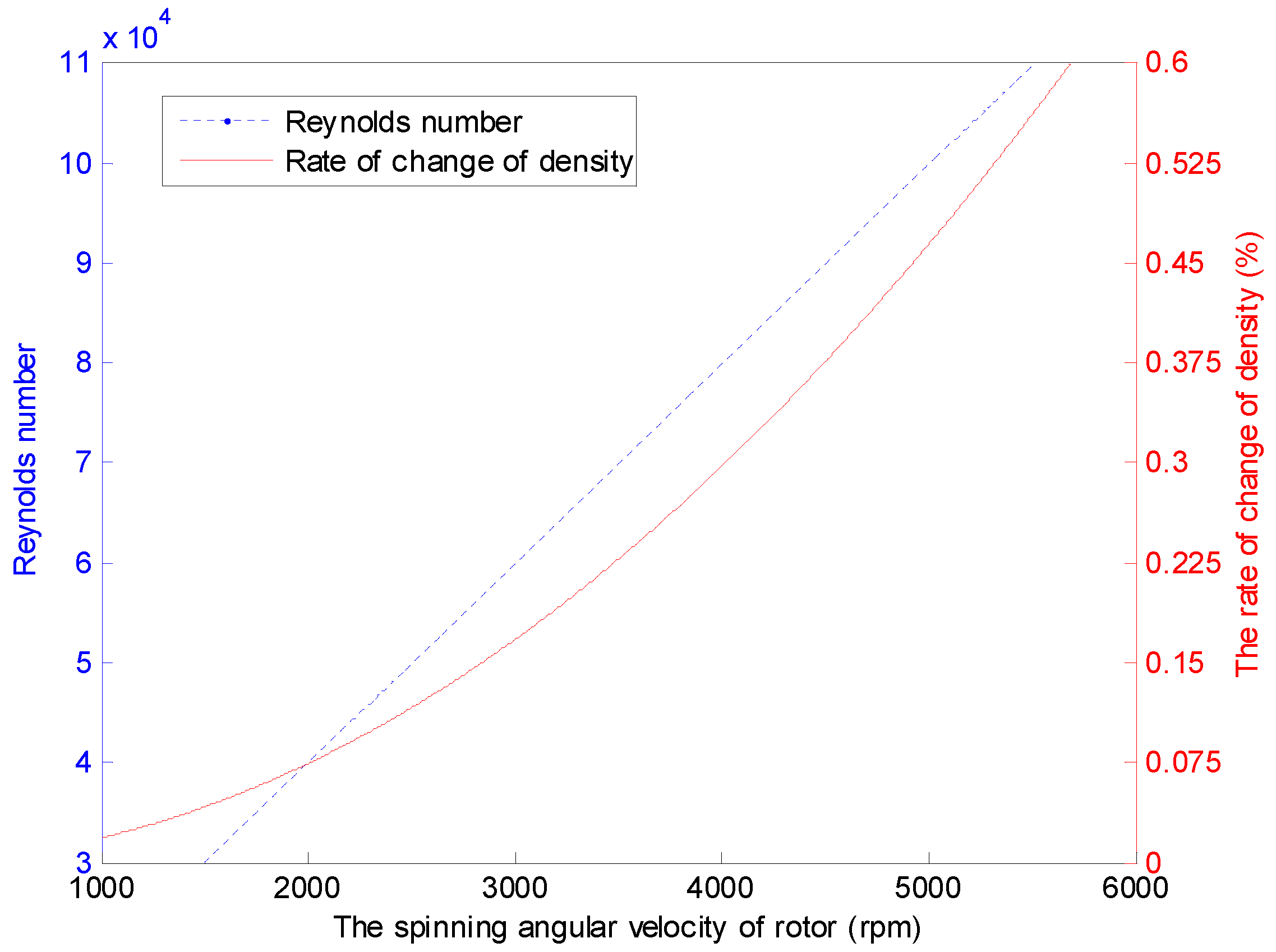
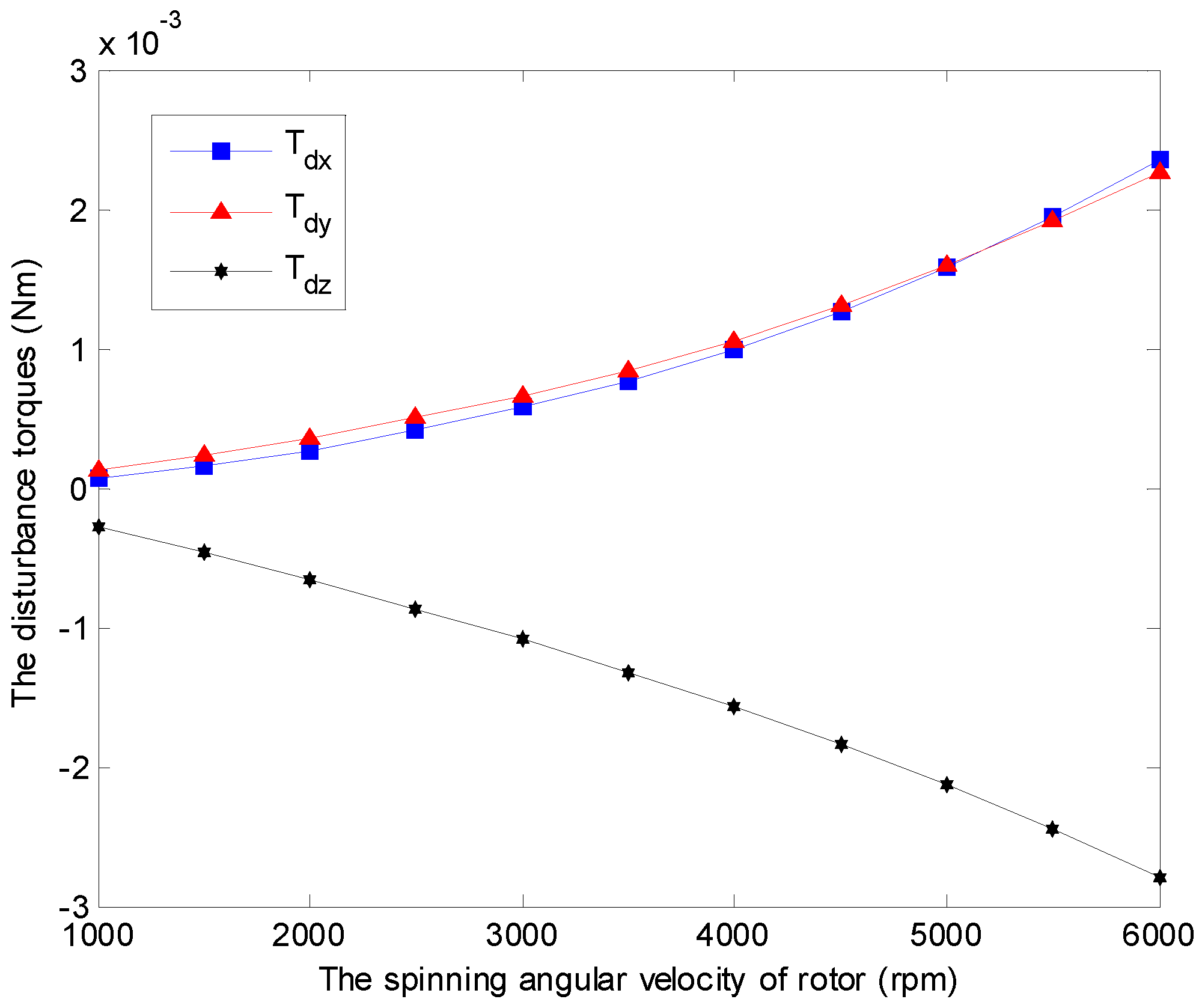
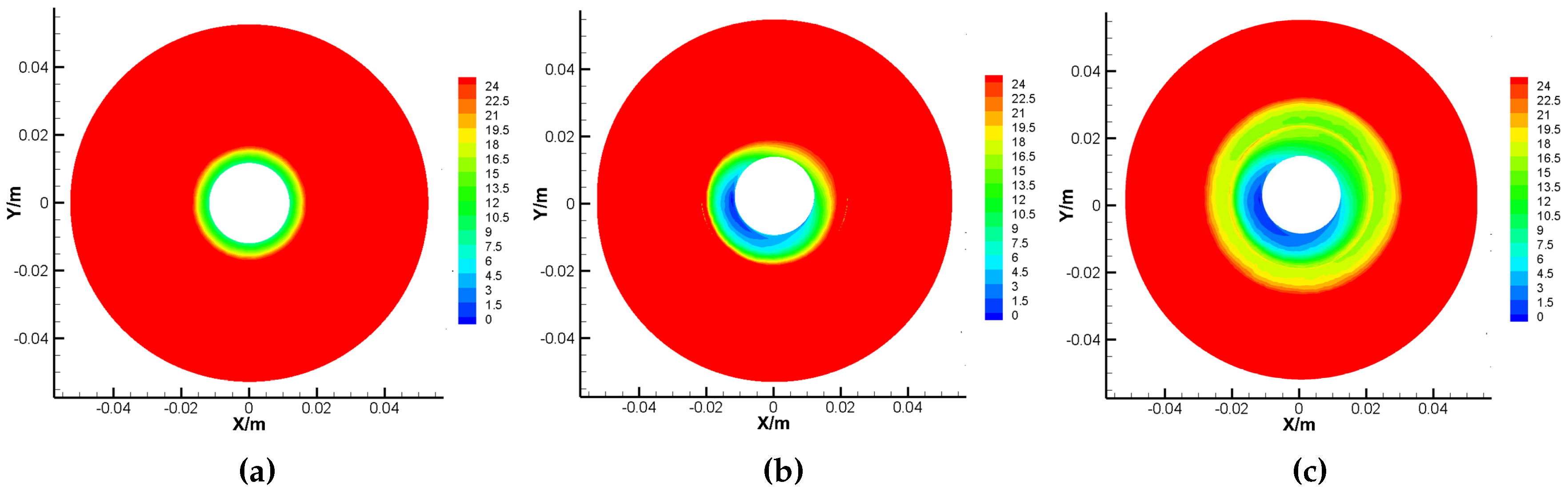
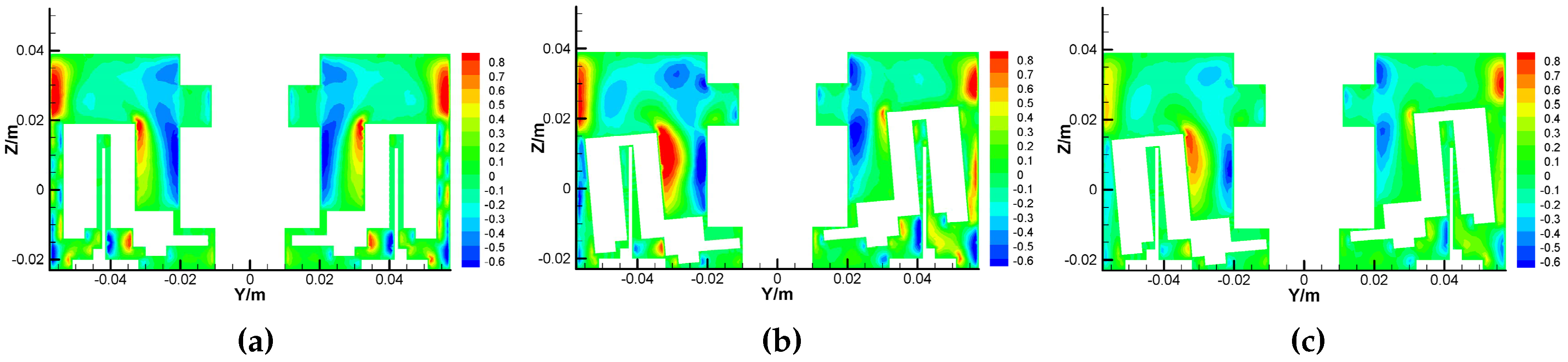
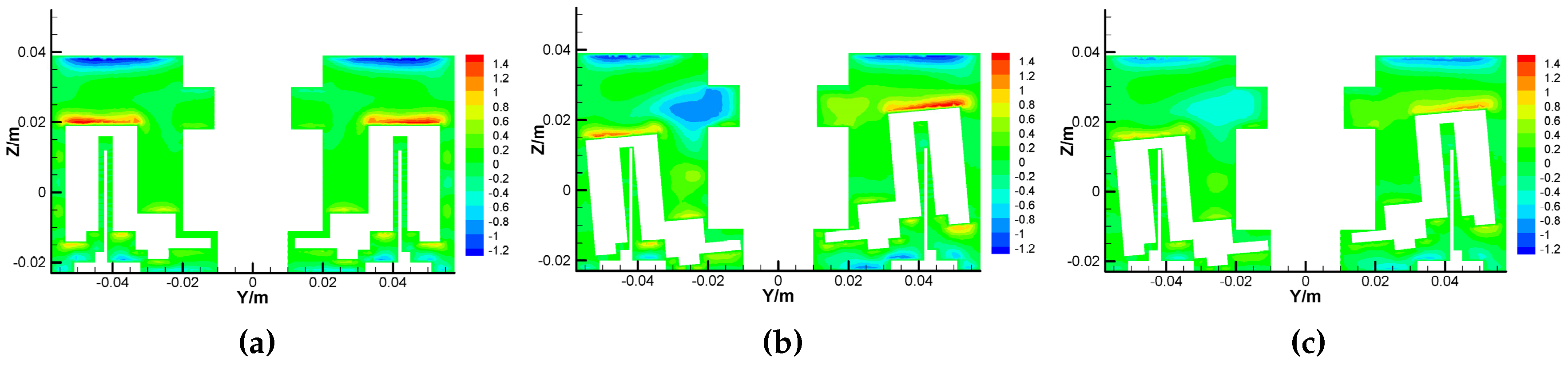
3.2. Simulation Results and Analysis
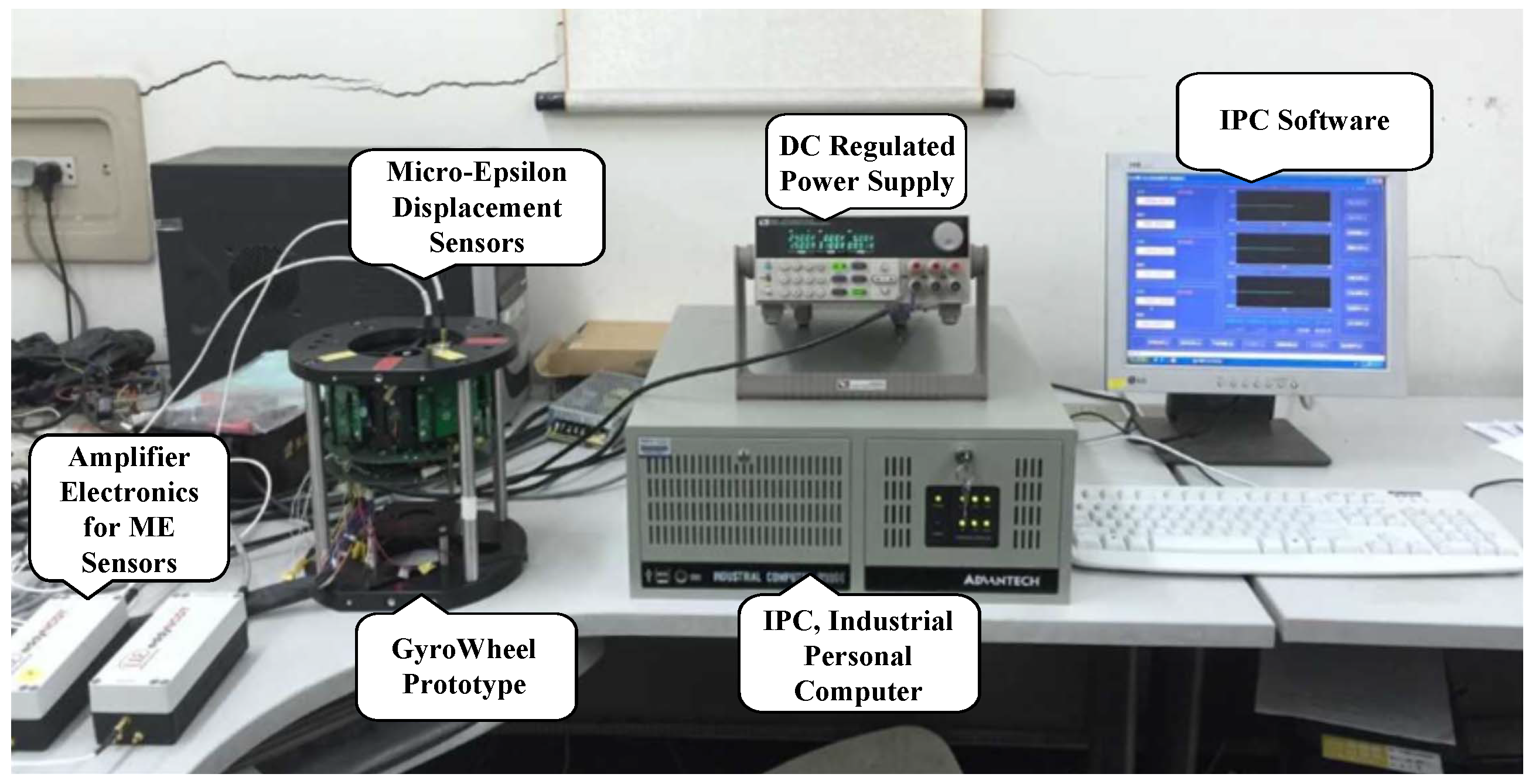
4. Experimental Verifications
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| DOF | Degree of Freedom |
| IPC | Industrial Personal Computer |
| CFD | Computational Fluid Dynamics |
| DC | Direct Current |
| DSP | Digital Signal Processor |
| PCI | Peripheral Component Interconnect |
Appendix A. Lagrange Equations of the GyroWheel System
Appendix B. Nonlinear Torque Term
References
- Ulrich, S.; Sasiadek, J.Z.; Barkana, I. Modeling and direct adaptive control of a flexible-joint manipulator. J. Guid. Control Dyn. 2012, 35, 25–39. [Google Scholar] [CrossRef]
- Nanos, K.; Papadopoulos, E.G. On the dynamics and control of flexible joint space manipulators. Control Eng. Pract. 2015, 45, 230–243. [Google Scholar] [CrossRef]
- Xie, W.T.; Dai, Y.J.; Wang, R.Z.; Sumathy, K. Concentrated solar energy applications using Fresnel lenses: A review. Renew. Sustain. Energy Rev. 2011, 15, 2588–2606. [Google Scholar] [CrossRef]
- Lawrence, A. Modern Inertial Technology: Navigation, Guidance, and Control; Springer: New York, NY, USA, 1998. [Google Scholar]
- Sendi, C.; Ayoubi, M.A. Robust fuzzy logic-based tracking control of a flexible spacecraft with H∞ performance criteria. In Proceedings of the AIAA SPACE 2014 Conference and Exposition (AIAA 2014-4417), San Diego, CA, USA, 4–7 August 2014; pp. 1–17.
- Kramer, H.J.; Cracknell, A.P. An overview of small satellites in remote sensing. Int. J. Remote Sens. 2008, 29, 4285–4337. [Google Scholar] [CrossRef]
- Jayaram, S. Design and analysis of nano momentum wheel for picosatellite attitude control system. Aircr. Eng. Aerosp. Technol. 2009, 81, 424–431. [Google Scholar] [CrossRef]
- Liu, X.K.; Yao, Y.; Ma, K.M.; Zhao, H.; He, F.H. Spacecraft angular rates estimation with gyrowheel based on extended high gain observer. Sensors 2016, 16, 537. [Google Scholar] [CrossRef] [PubMed]
- Gao, S.; Clark, K.; Unwin, M.; Zackrisson, J.; Shiroma, W.A.; Akagi, J.M.; Maynard, K.; Garner, P.; Boccia, L.; Amendola, G.; et al. Antennas for modern small satellites. IEEE Antennas Propag. Mag. 2009, 51, 40–56. [Google Scholar] [CrossRef]
- Argoun, M.B. Recent design and utilization trends of small satellites in developing countries. Acta Astron. 2012, 71, 119–128. [Google Scholar] [CrossRef]
- Tyc, G.; Spring, D.; Taylor, B.; Staley, D.; Vinnins, M. The GyroWheelTM development and flight qualification program. In Proceedings of the 25th Annual AAS Guidance and Control Conference, Breckenridge, CO, USA, 6–10 February 2002.
- Tyc, G.; Whiteheed, W.; Pradhan, S.; Staley, D.A.; Ower, C.; Cain, J.; Wiktowy, M. GyroWheelTM-an innovative new actuator/sensor for 3-axis spacecraft attitude control. In Proceedings of the 13th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 23–26 August 1999.
- Guo, Z.S.; Huo, X.; Zhang, X.M.; Chen, W.S.; Yao, Y. Vibration analysis of flex-gimbal system with high spinning velocity. In Proceedings of the 28th Chinese Control and Decision Conference, Yinchuan, China, 28–30 May 2016; pp. 2041–2046.
- Syed, Z.F.; Aggarwal, P.; Goodall, C.; Niu, X.; El-Sheimy, N. A new multi-position calibration method for MEMS inertial navigation systems. Meas. Sci. Technol. 2007, 18, 1897–1907. [Google Scholar] [CrossRef]
- Bekkeng, J.K. Calibration of a novel MEMS inertial reference unit. IEEE Trans. Instrum. Meas. 2009, 58, 1967–1974. [Google Scholar] [CrossRef]
- Fu, L.; Zhu, Y.Q.; Wang, L.L.; Wang, X.L. A D-optimal multi-position method for dynamically tuned gyroscopes. Chin. J. Aeron. 2011, 24, 210–218. [Google Scholar] [CrossRef]
- Hall, J.M. Calibration of an Innovative Rate Sensing/Momentum Management Instrument for De-Tuned Operation and Temperature Effects; Carleton University: Ottawa, ON, Canada, 2008. [Google Scholar]
- Ling, L.B.; Chen, R.K. Improve the tuned flexure gyro’s property by adjusting its inside gas dynamic pressure torque. J. Chin. Inertial Technol. 1998, 6, 40–44. [Google Scholar]
- Tang, F.; Shi, Y.P.; Wang, X.H. Gap flow field of liquid floating rotor gyro. Opt. Precis. Eng. 2013, 21, 2079–2086. [Google Scholar] [CrossRef]
- Li, D.C.; Wei, Y.Y.; Wei, J.X.; Han, X.Y.; Wu, L.H. Analysis on temperature field and inner flow field of long-life gyro’s floater with Field-Structure coupling theory. J. Chin. Inert. Technol. 2007, 15, 721–759. [Google Scholar]
- Stevenson, D.; Schaub, H. Nonlinear control analysis of a double-gimbal variable-speed control moment gyroscope. J. Guid. Control Dyn. 2012, 35, 787–793. [Google Scholar] [CrossRef]
- Gavelli, F.; Bullister, E.; Kytomaa, H. Application of CFD (Fluent) to LNG spills into geometrically complex environments. J. Hazard. Mater. 2008, 159, 158–168. [Google Scholar] [CrossRef] [PubMed]
- Hosseini, S.A.; Tafreshi, H.V. Modeling particle-loaded single fiber efficiency and fiber drag using ANSYS-Fluent CFD code. Comput. Fluids 2012, 66, 157–166. [Google Scholar] [CrossRef]
- Kirpo, M. Global simulation of the Czochralski silicon crystal growth in ANSYS FLUENT. J. Cryst. Growth 2013, 371, 60–69. [Google Scholar] [CrossRef]
- Vascellari, M.; Schulze, S.; Nikrityuk, P. Numerical simulation of pulverized coal MILD combustion using a new heterogeneous combustion submodel. Flow Turbul. Combust 2014, 92, 319–345. [Google Scholar] [CrossRef]
- Jeong, W.; Senong, J. Comparison of effects on technical variances of computational fluid dynamics (CFD)software based on finite element and finite volume methods. Int. J. Mech. Sci. 2014, 78, 19–26. [Google Scholar] [CrossRef]
- Hosseini, S.A.; Tafreshi, H.V. Modeling particle filtration in disordered 2-D domains: A comparison with cell models. Sep. Purif. Technol. 2010, 74, 160–169. [Google Scholar] [CrossRef]
- Šimčík, M.; Mota, A.; Ruzicka, M.C.; Vicente, A.; Teixeira, J. CFD simulation and experimental measurement of gas holdup and liquid interstitial velocity in internal loop airlift reactor. Chem. Eng. Sci. 2011, 66, 3268–3279. [Google Scholar] [CrossRef] [Green Version]
- Cabaret, F.; Fradette, L.; Tanguy, P.A. Effect of shaft eccentricity on the laminar mixing performance of a radial impeller. Can. J. Chem. Eng. 2008, 86, 971–977. [Google Scholar] [CrossRef]
- Hara, S.; Watanabe, T.; Furukawa, H.; Endo, S. Effects of a radial gap on vortical flow structures around a rotating disk in a cylindrical casing. J. Vis. 2015, 18, 501–510. [Google Scholar] [CrossRef]
- Murthy, B.N.; Joshi, J.B. Assessment of standard k − ε, RSM and LES turbulence models in a baffled stirred vessel agitated by various impeller designs. Chem. Eng. Sci. 2008, 63, 5468–5495. [Google Scholar] [CrossRef]
- Wójtowicz, R.; Lipin, A.A.; Talaga, J. On the possibility of using of different turbulence models for modeling flow hydrodynamics and power consumption in mixing vessels with turbine impellers. Theor. Found. Chem. Eng. 2014, 48, 360–375. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Tilt angle of spin axis, ϕ | ±5 |
| Spinning angular velocity, | 3500 ± 500 rpm |
| Moment of inertia along the axis, | 1.062 × kg·m |
| Moment of inertia along the axis, | 1.062 × kg·m |
| Moment of inertia along the axis, | 1.779 × kg·m |
| Structure Parameter | Value |
|---|---|
| Tilt angle along the axis, | ±5 |
| Tilt angle along the axis, | 0 |
| Radius of GyroWheel rotor, | 53.5 mm |
| Height of GyroWheel rotor, | 38 mm |
| Radius of GyroWheel case, | 57.5 mm |
| Height of GyroWheel case, | 62 mm |
| Temperature | 20 C |
| Atmospheric pressure, | 101,325 Pa |
| Density of air, ρ | 1.205 kg/m |
| Coefficients of viscosity of air, μ | 1.81 × 10 Pa·s |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huo, X.; Feng, S.; Liu, K.; Wang, L.; Chen, W. Aerodynamic Drag Analysis of 3-DOF Flex-Gimbal GyroWheel System in the Sense of Ground Test. Sensors 2016, 16, 2081. https://doi.org/10.3390/s16122081
Huo X, Feng S, Liu K, Wang L, Chen W. Aerodynamic Drag Analysis of 3-DOF Flex-Gimbal GyroWheel System in the Sense of Ground Test. Sensors. 2016; 16(12):2081. https://doi.org/10.3390/s16122081
Chicago/Turabian StyleHuo, Xin, Sizhao Feng, Kangzhi Liu, Libin Wang, and Weishan Chen. 2016. "Aerodynamic Drag Analysis of 3-DOF Flex-Gimbal GyroWheel System in the Sense of Ground Test" Sensors 16, no. 12: 2081. https://doi.org/10.3390/s16122081
APA StyleHuo, X., Feng, S., Liu, K., Wang, L., & Chen, W. (2016). Aerodynamic Drag Analysis of 3-DOF Flex-Gimbal GyroWheel System in the Sense of Ground Test. Sensors, 16(12), 2081. https://doi.org/10.3390/s16122081