
Wi-Fi/MARG Integration for Indoor Pedestrian Localization

Abstract
:1. Introduction
2. Related Works
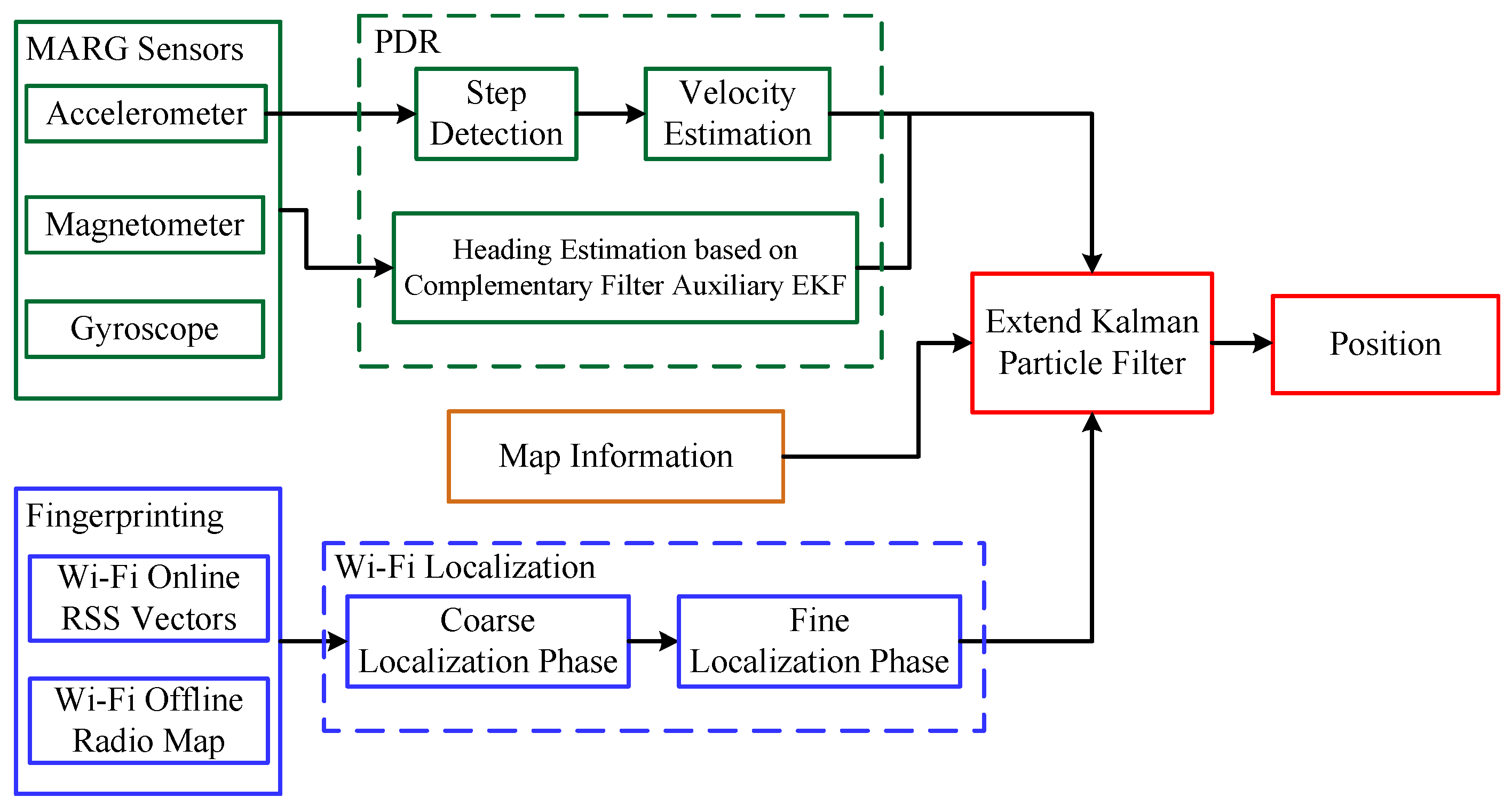
3. System Description
3.1. Pedestrian Dead Reckoning
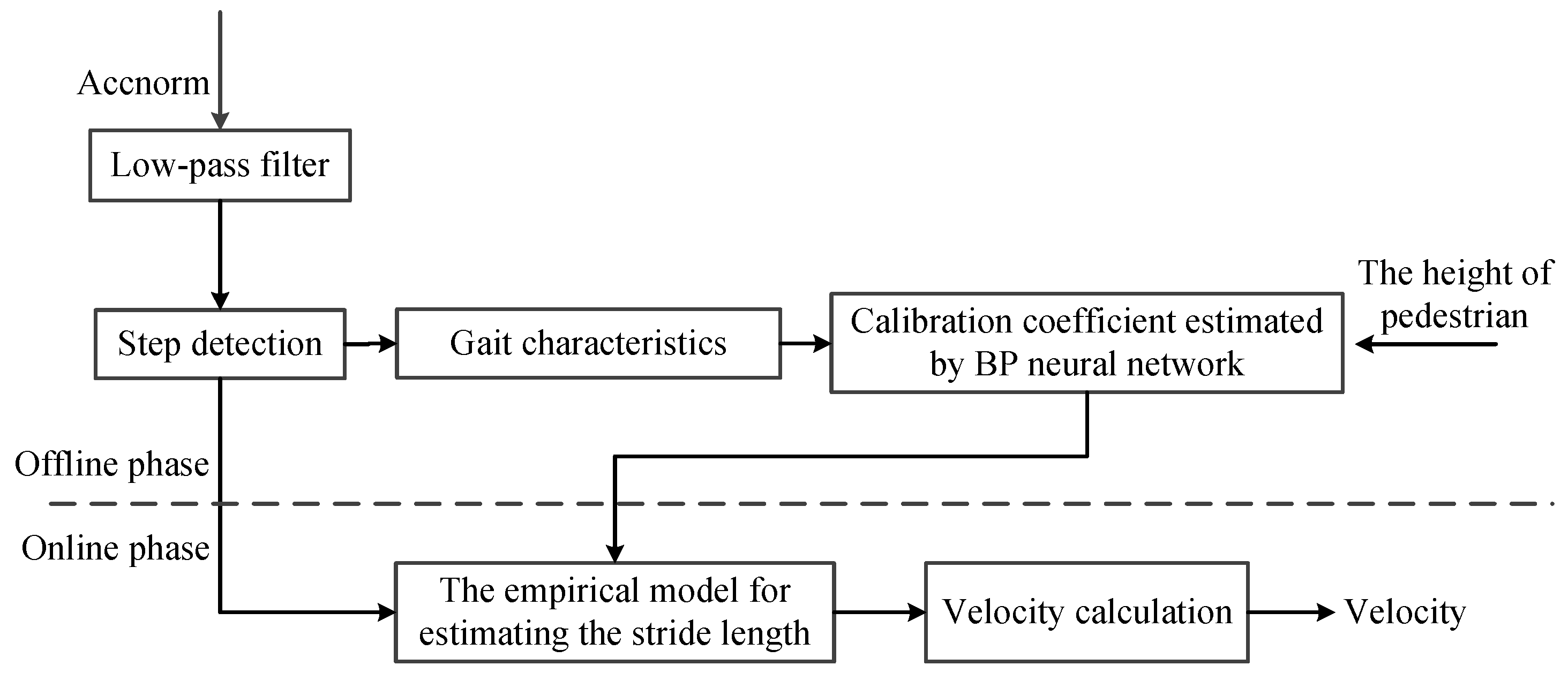
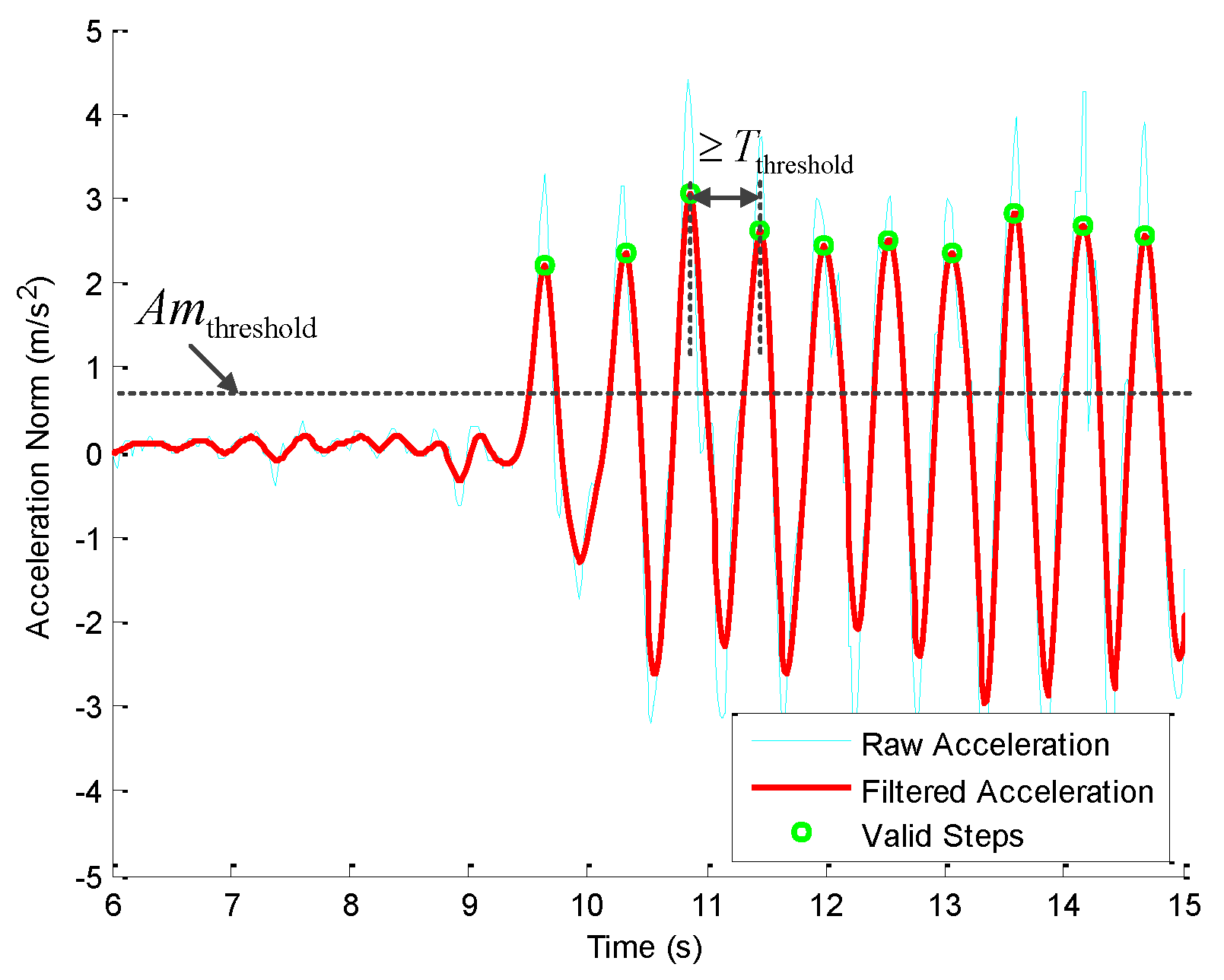
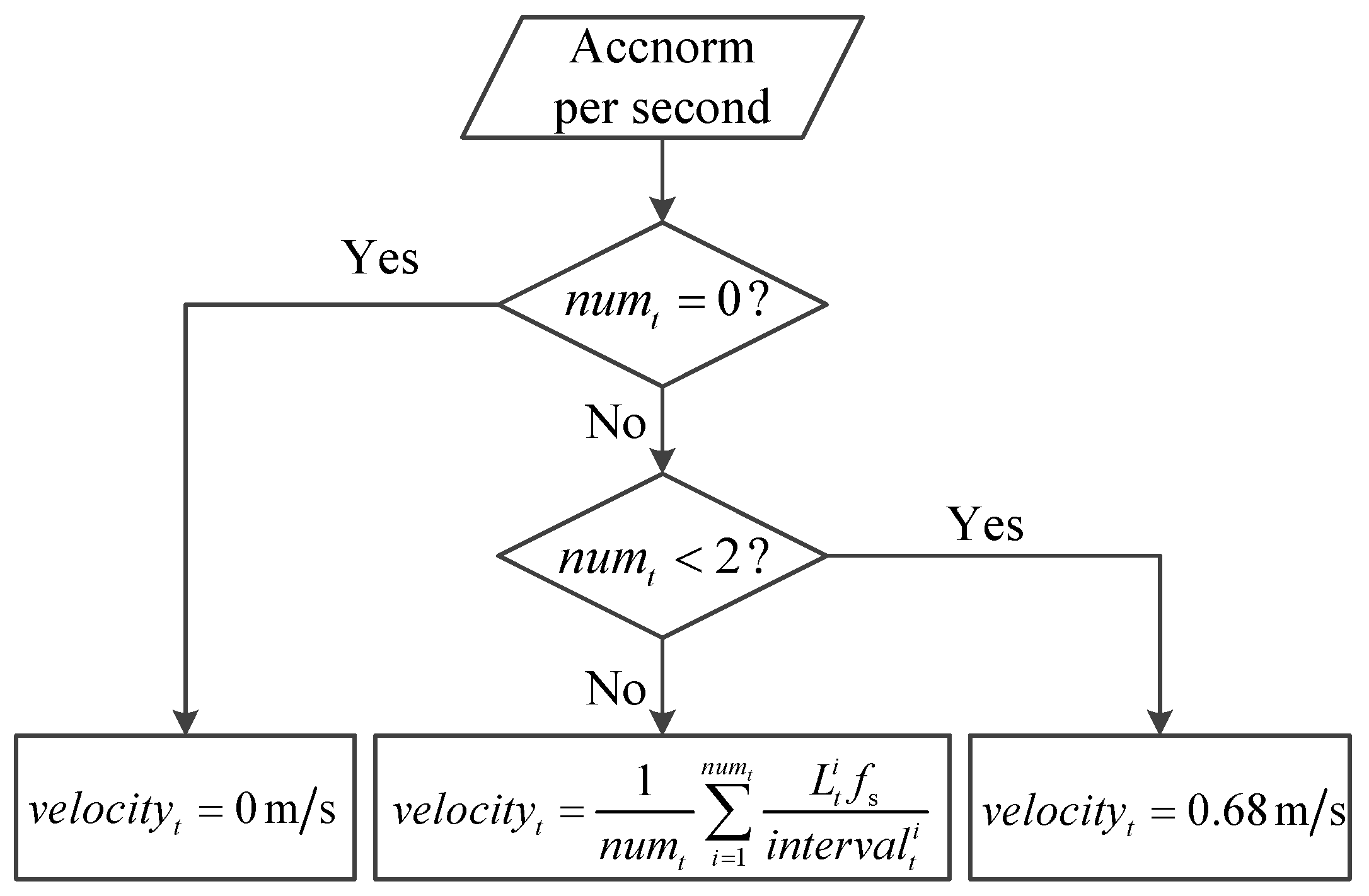
3.1.1. Velocity Estimation
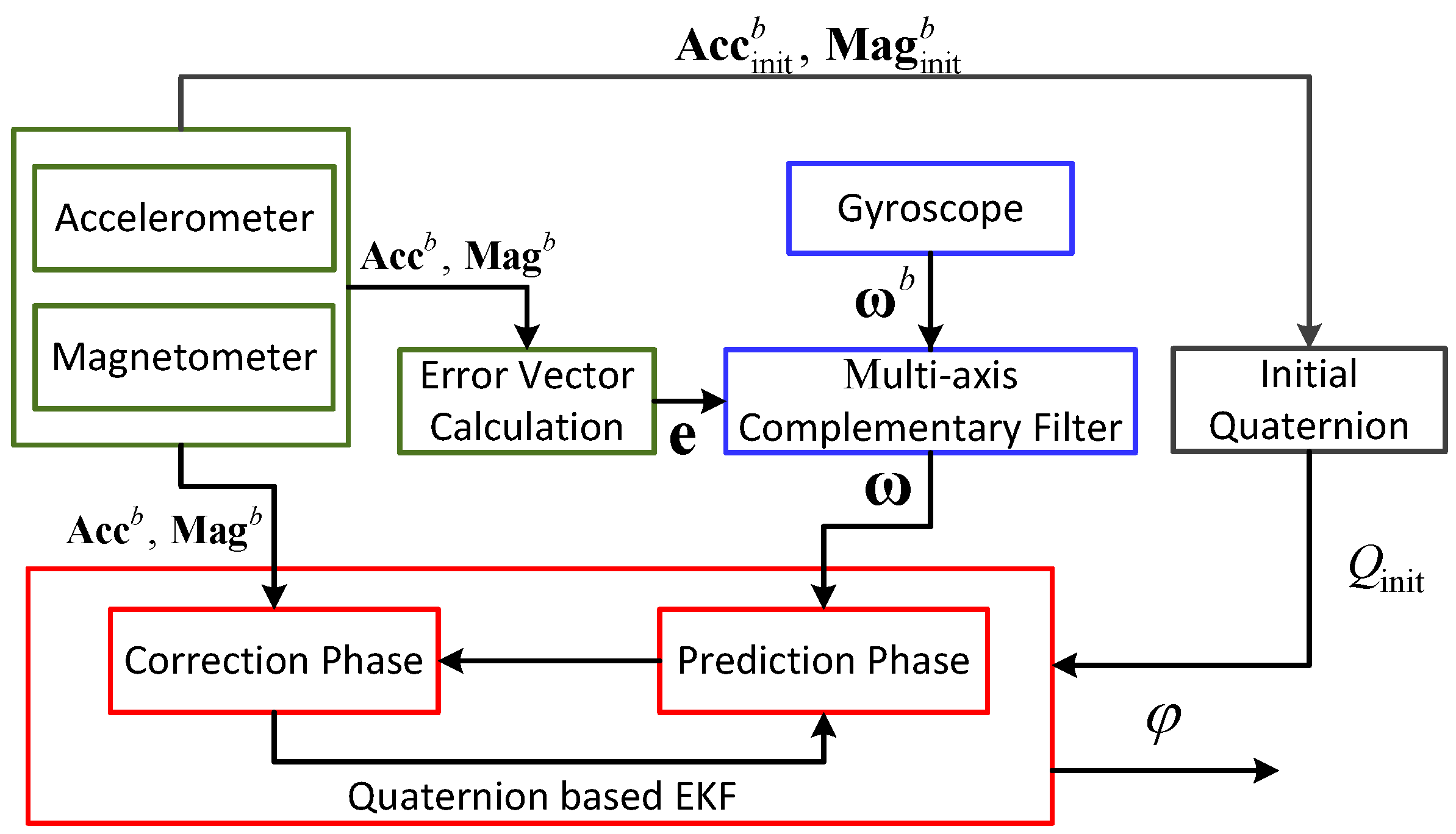
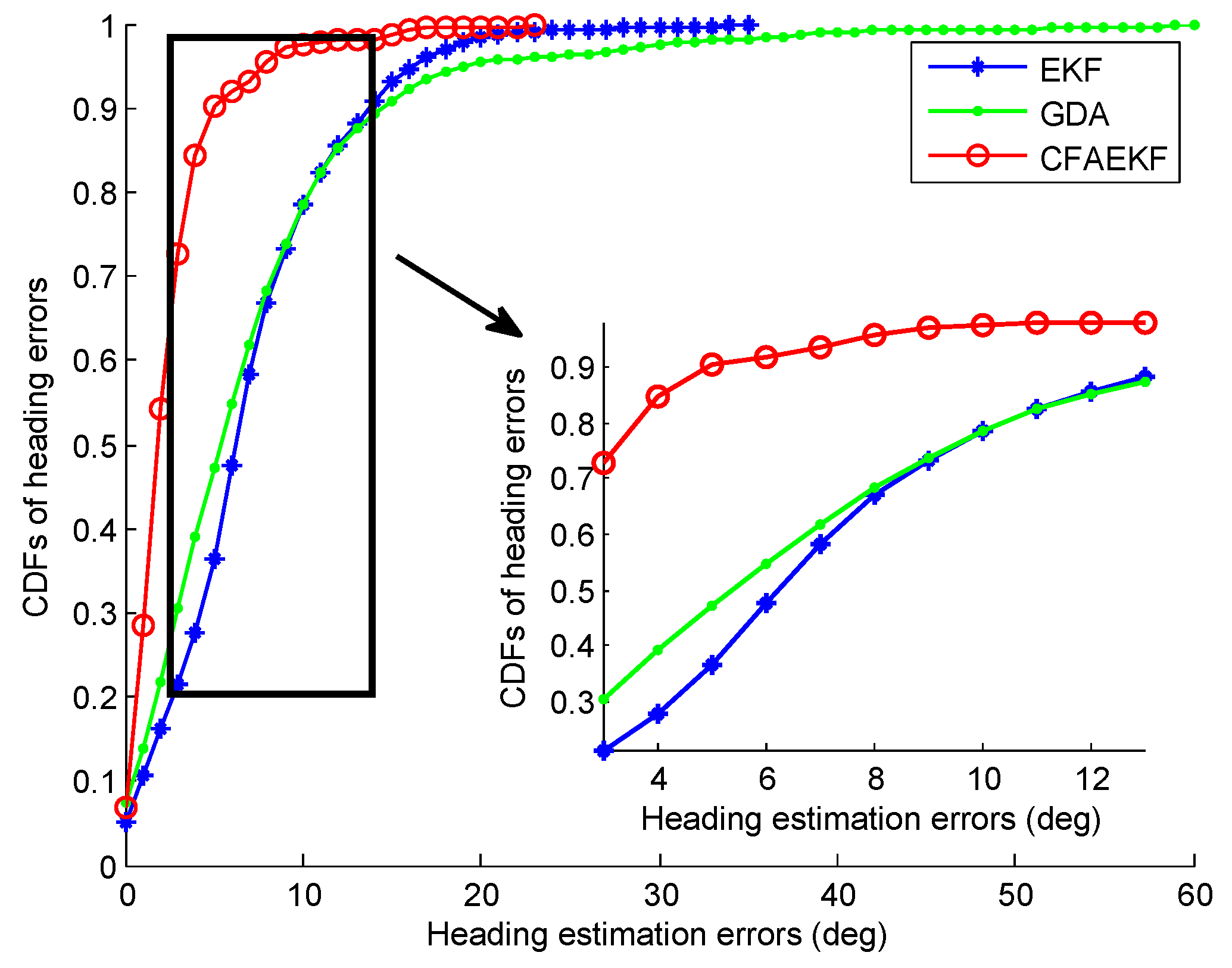
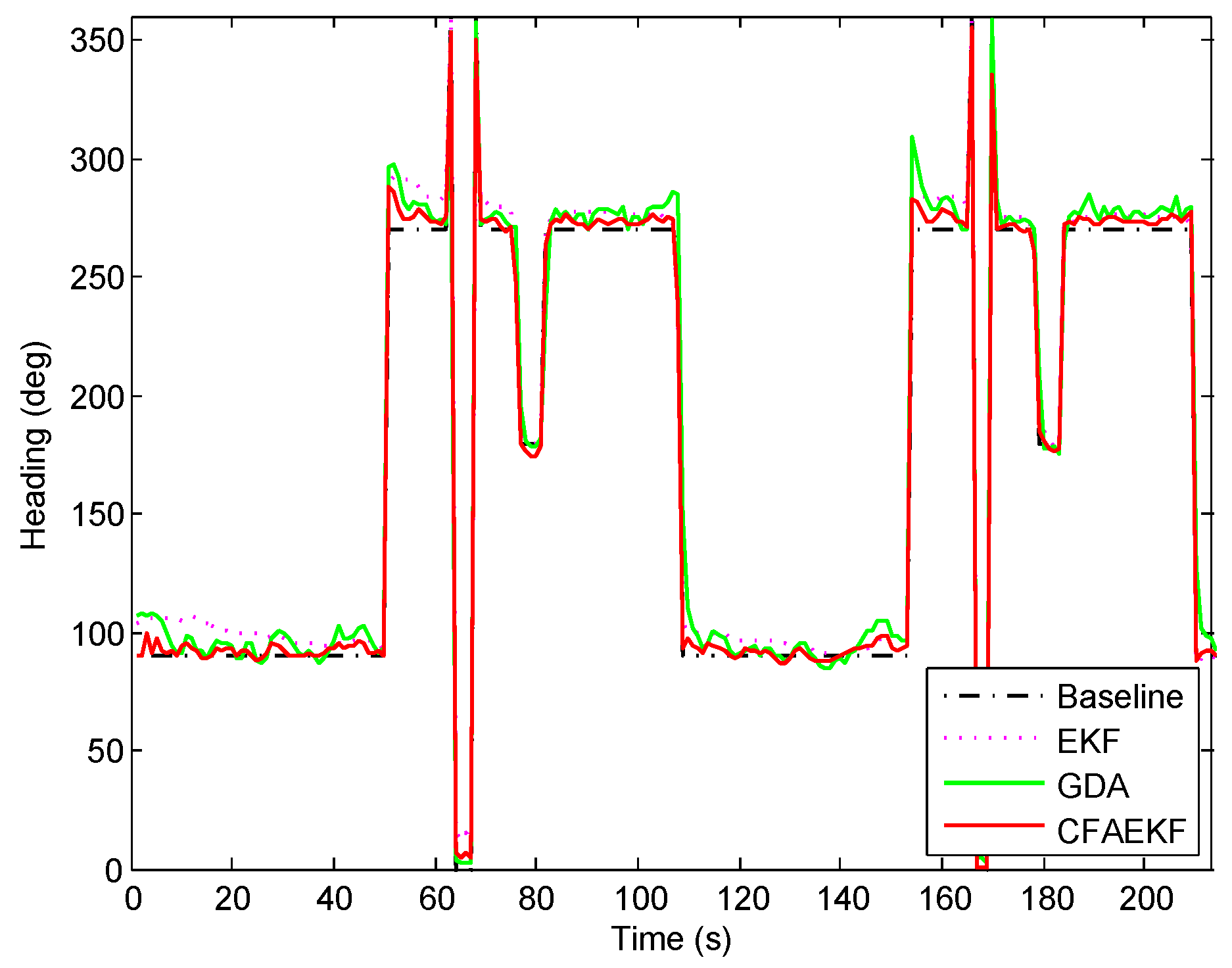
3.1.2. Heading Estimation
3.2. Wi-Fi Localization
3.2.1. Offline Phase
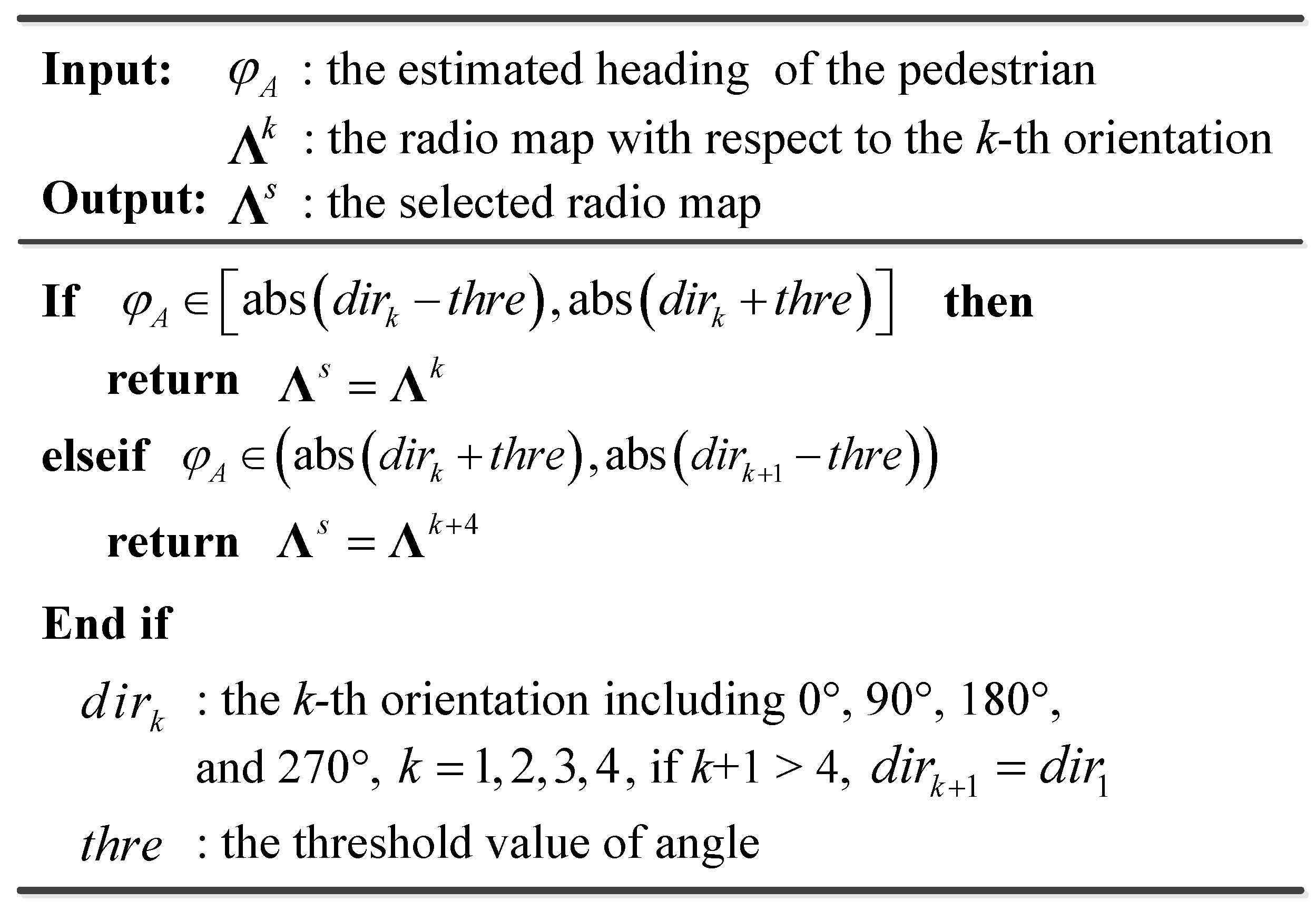
3.2.2. Online Phase
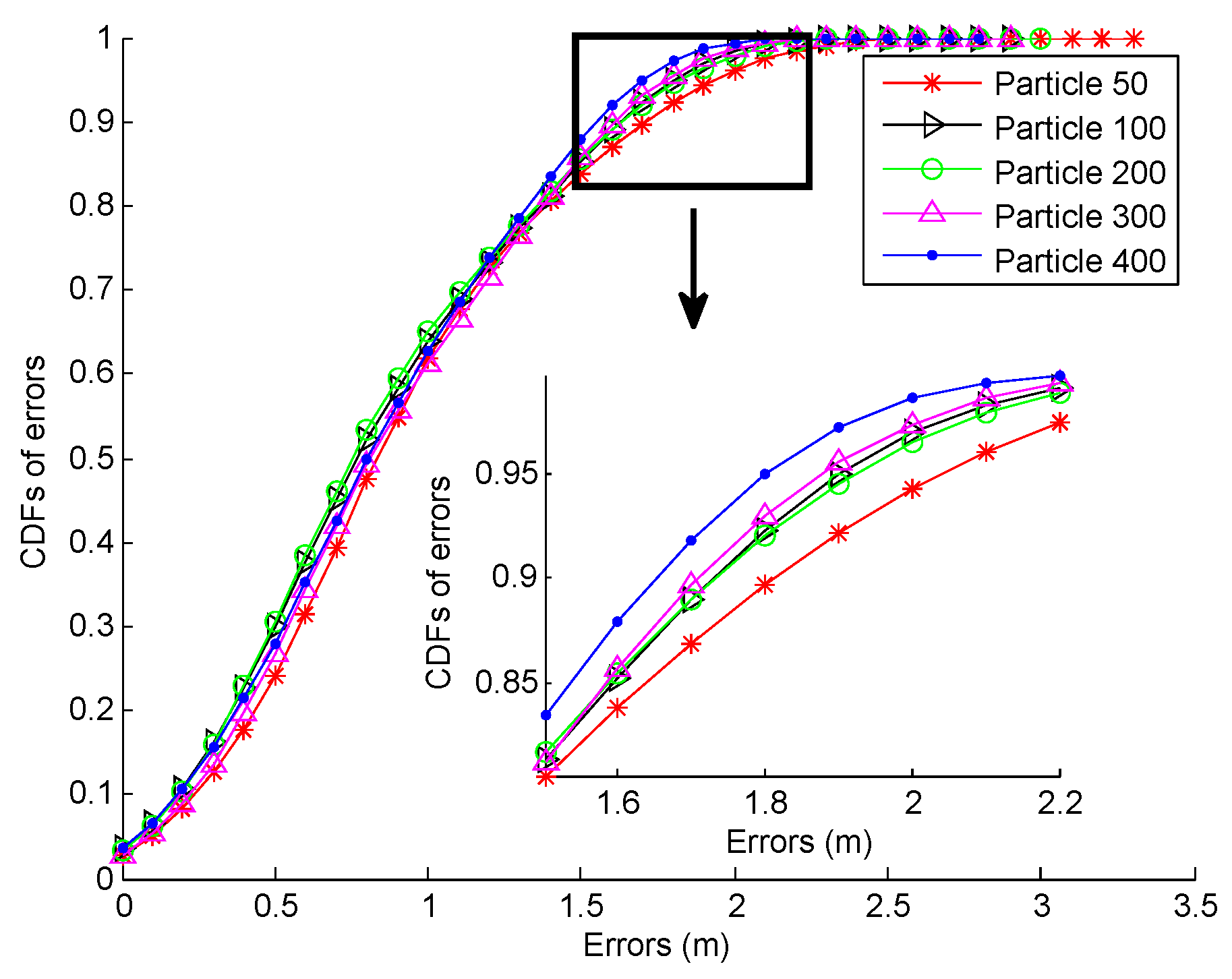
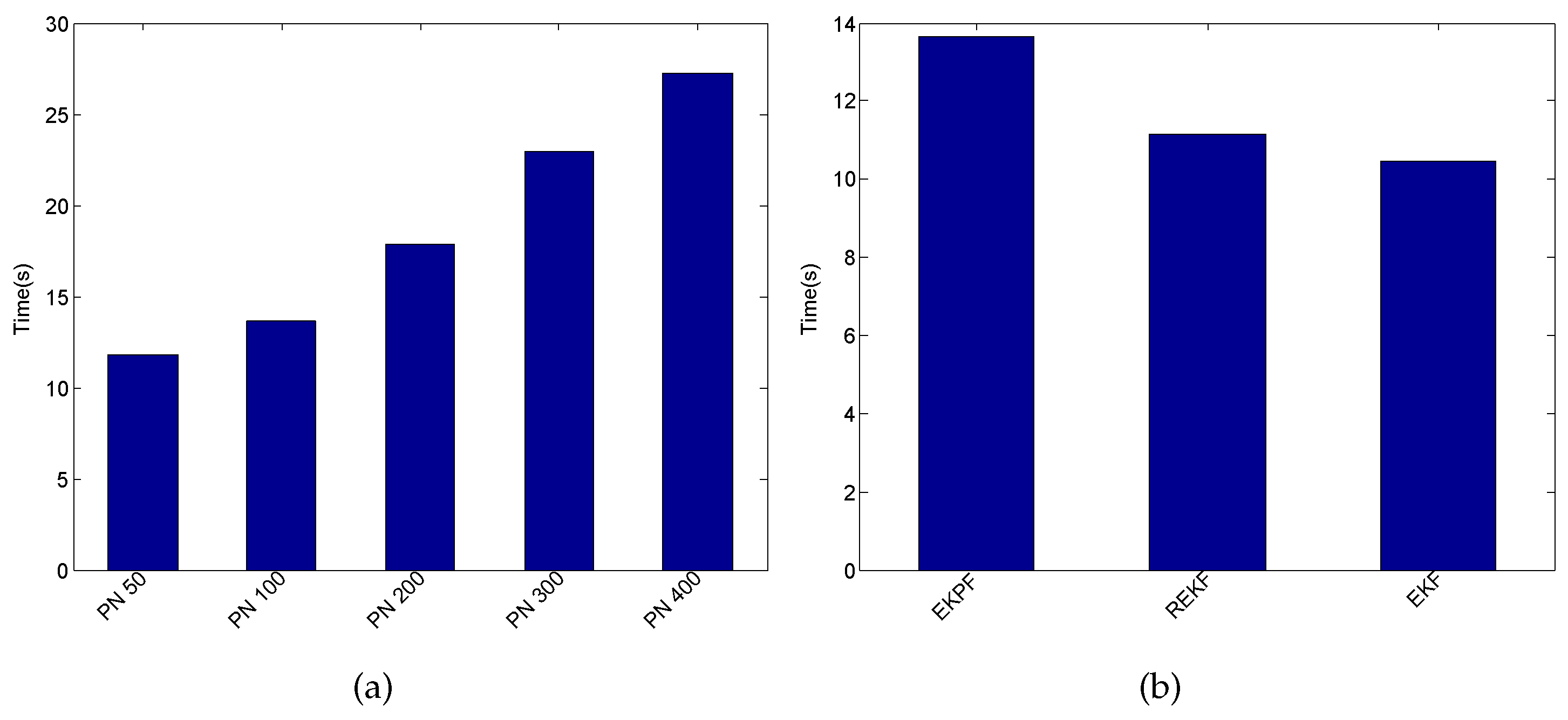
3.3. Extended Kalman Particle Filter
4. Experimental Results
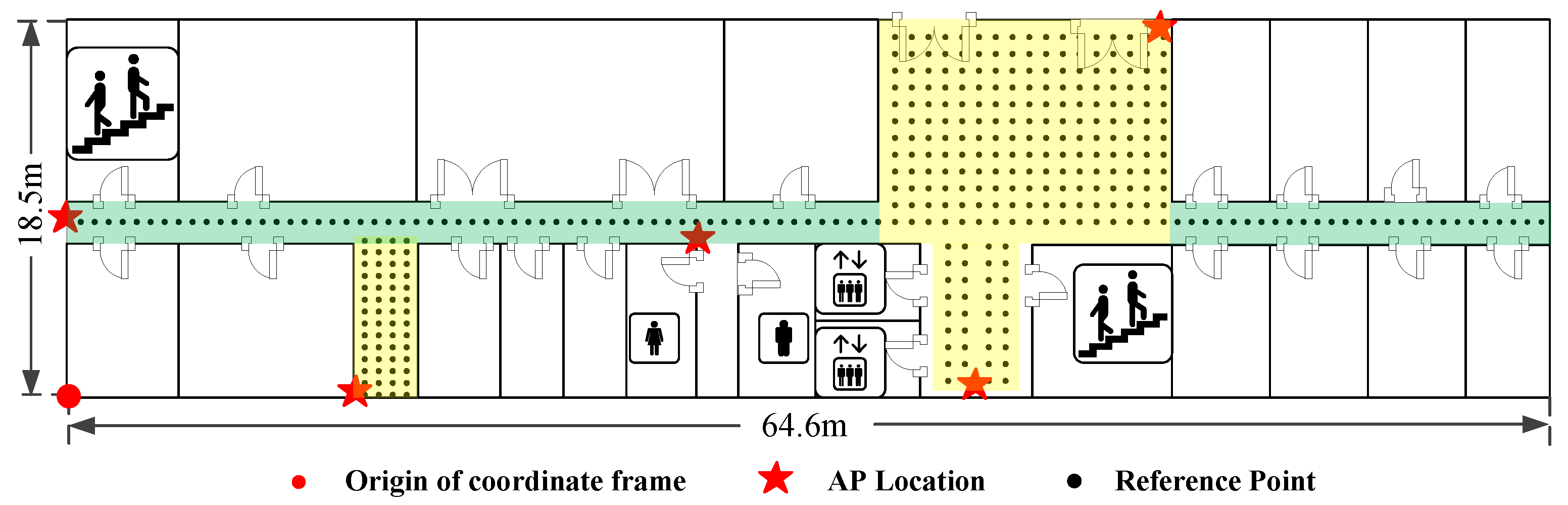
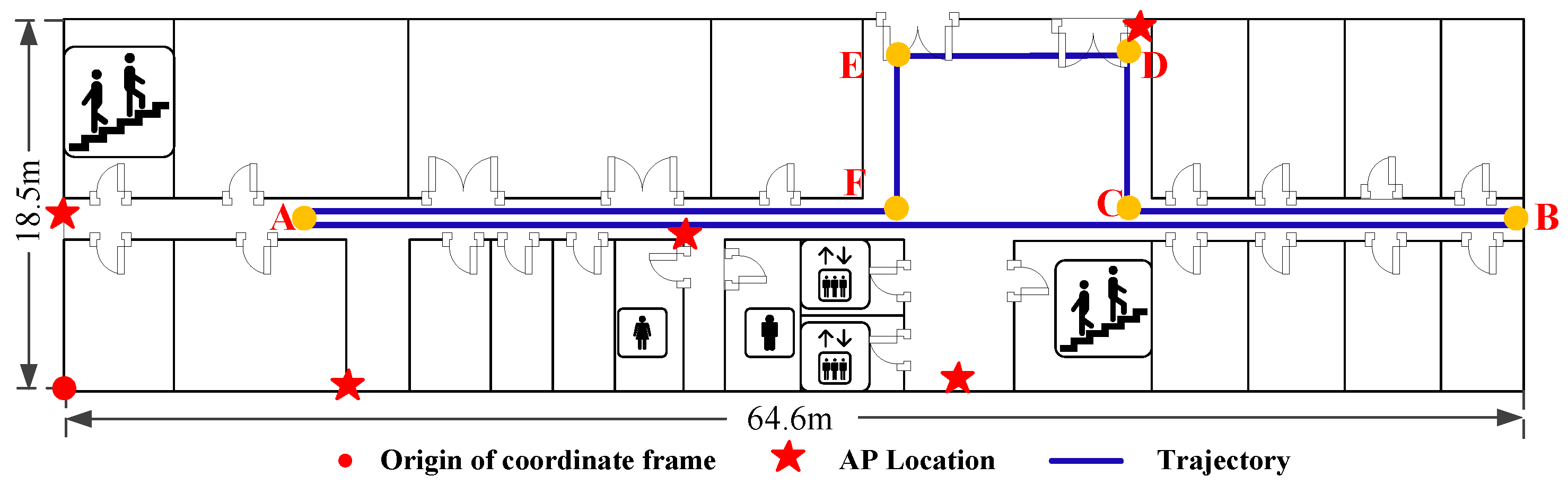
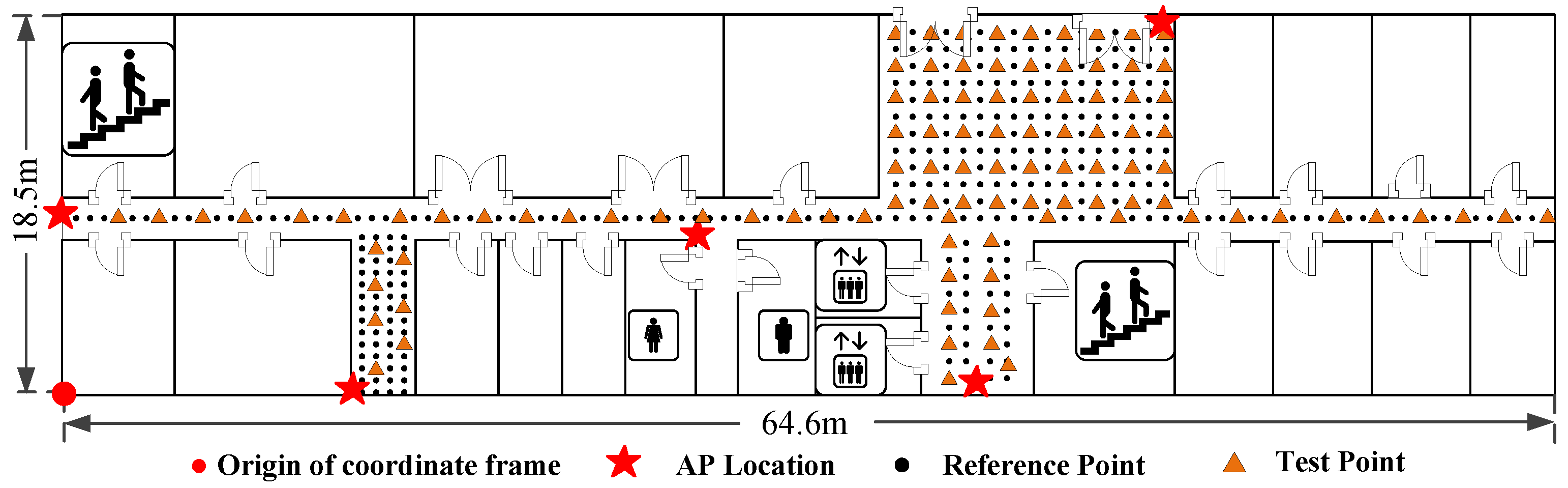
4.1. Environment Layout
4.2. Performance of PDR Localization
4.2.1. Stride Length Estimation
4.2.2. Heading Estimation
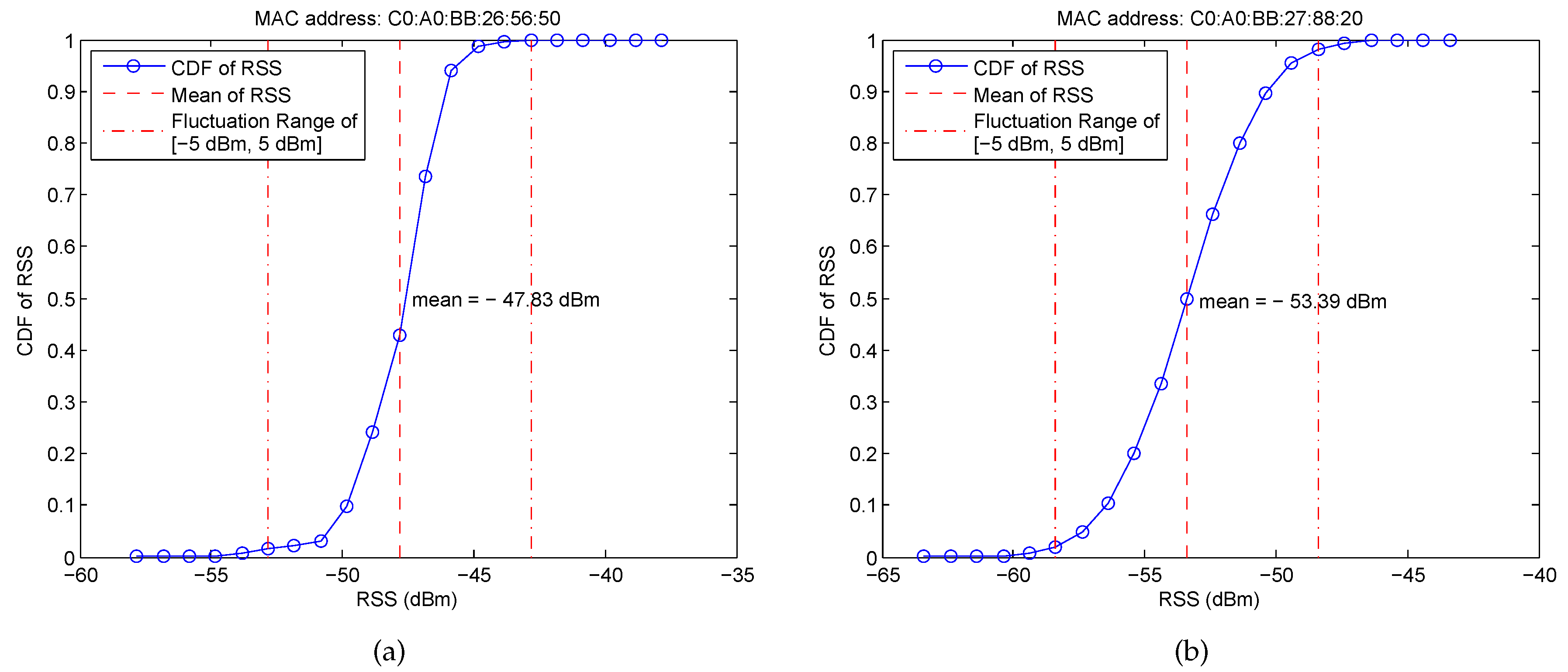
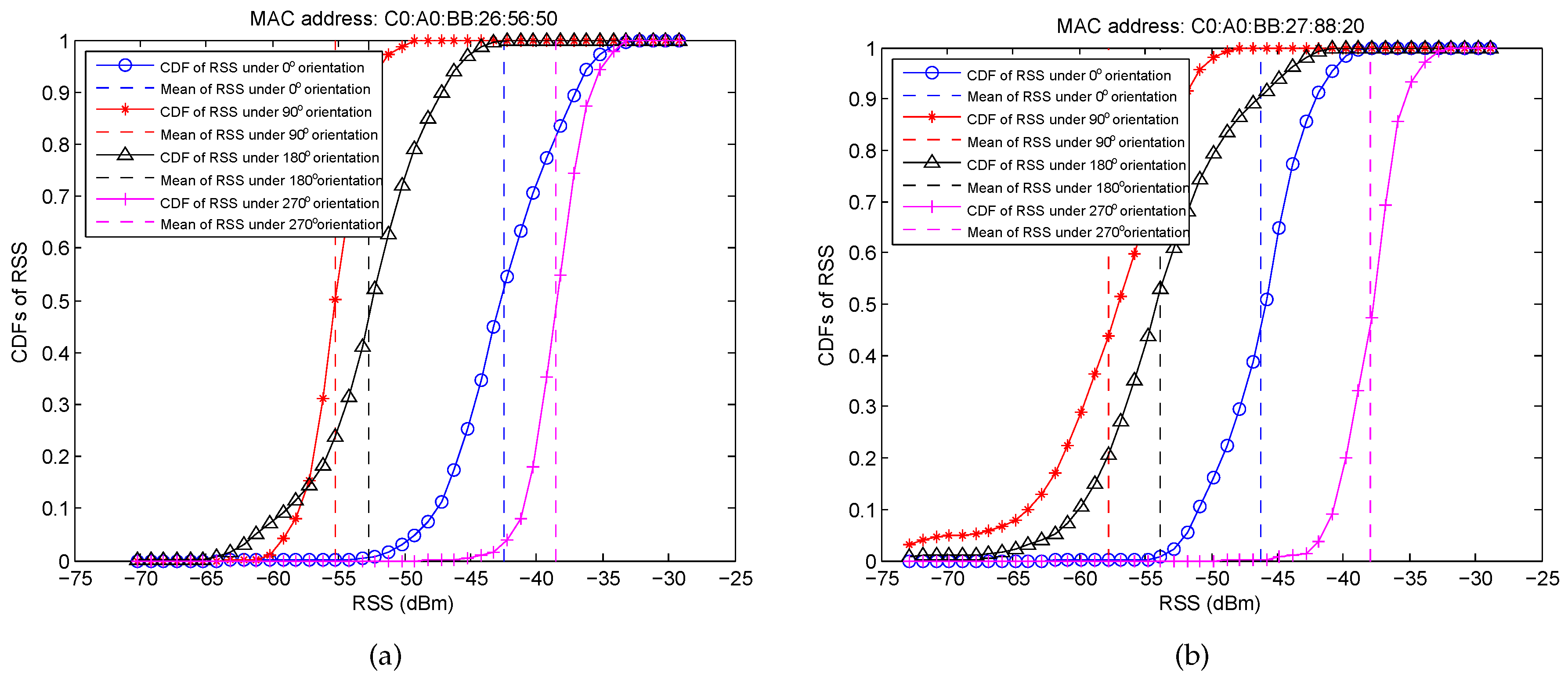
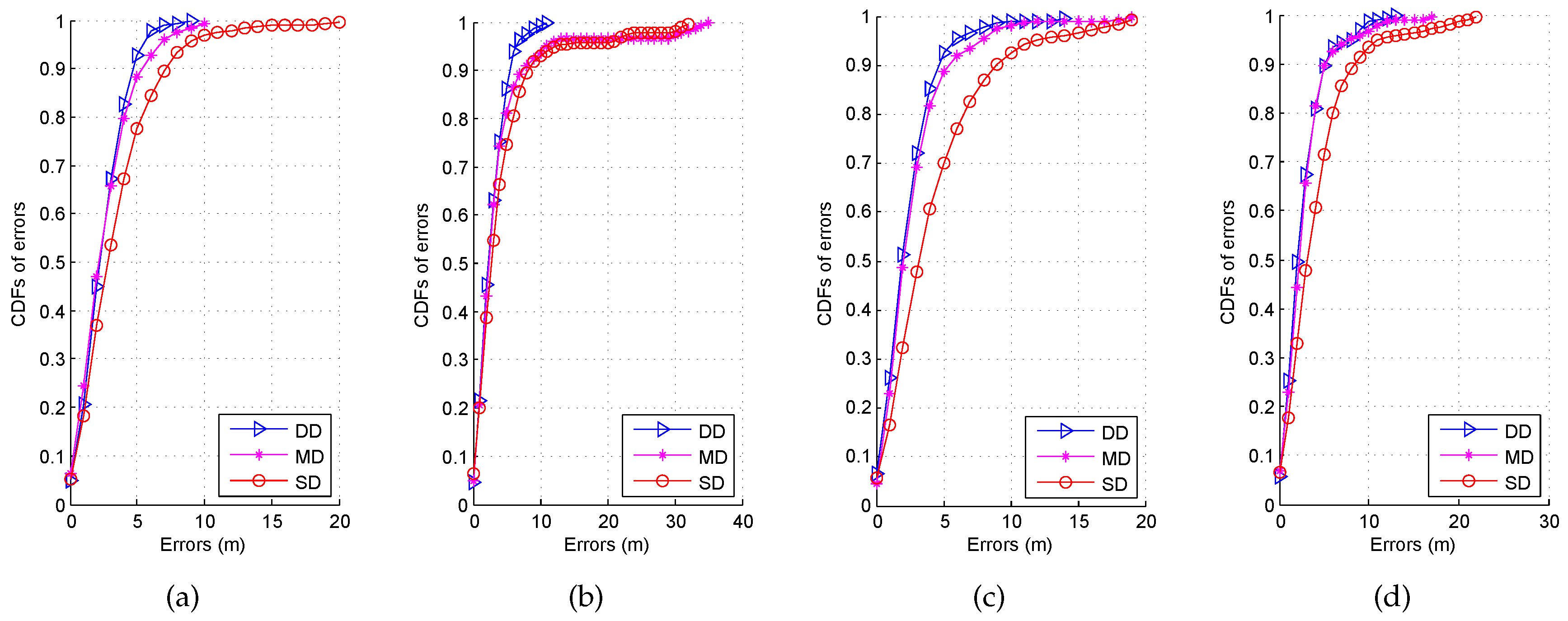
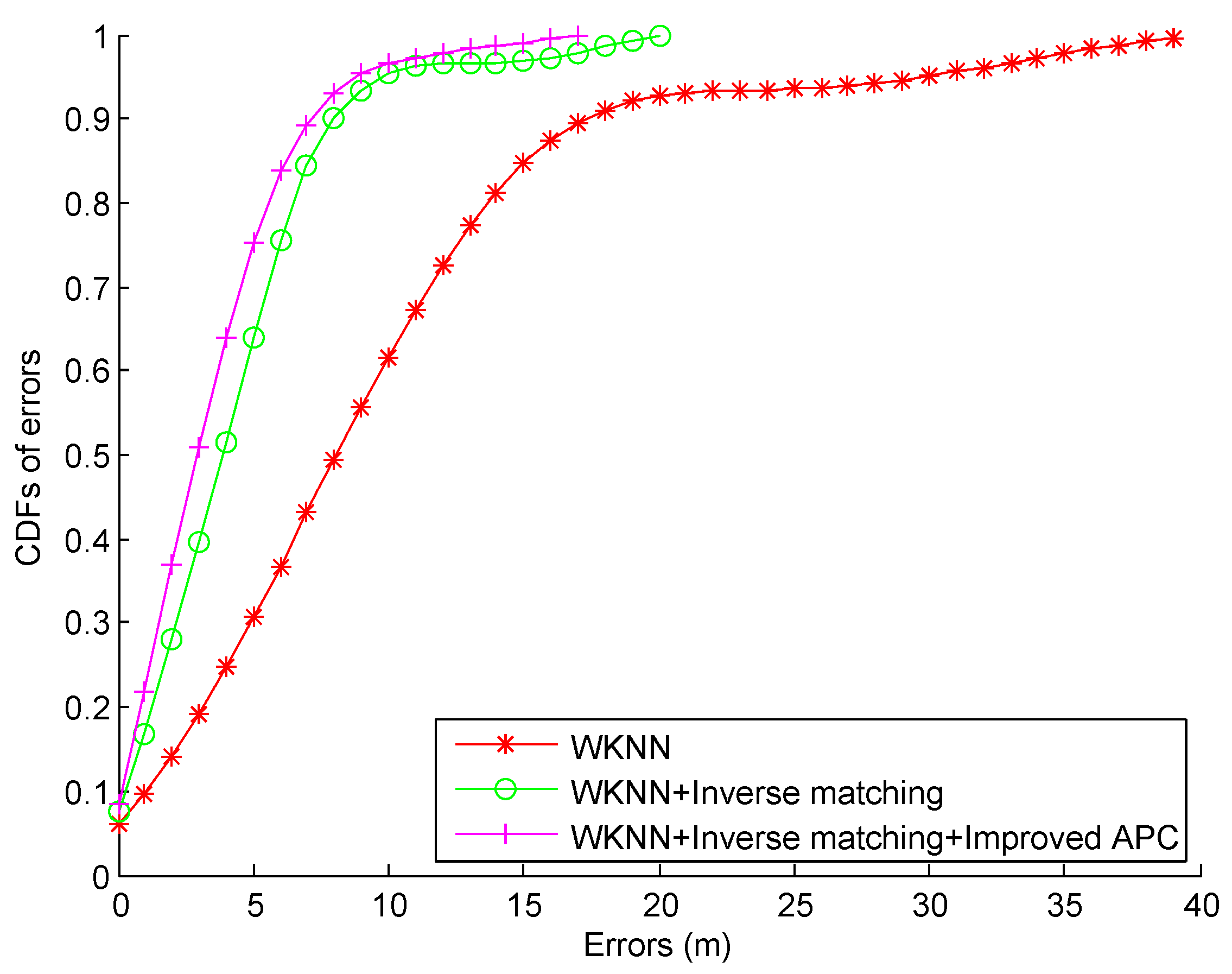
4.3. Performance of Wi-Fi Localization
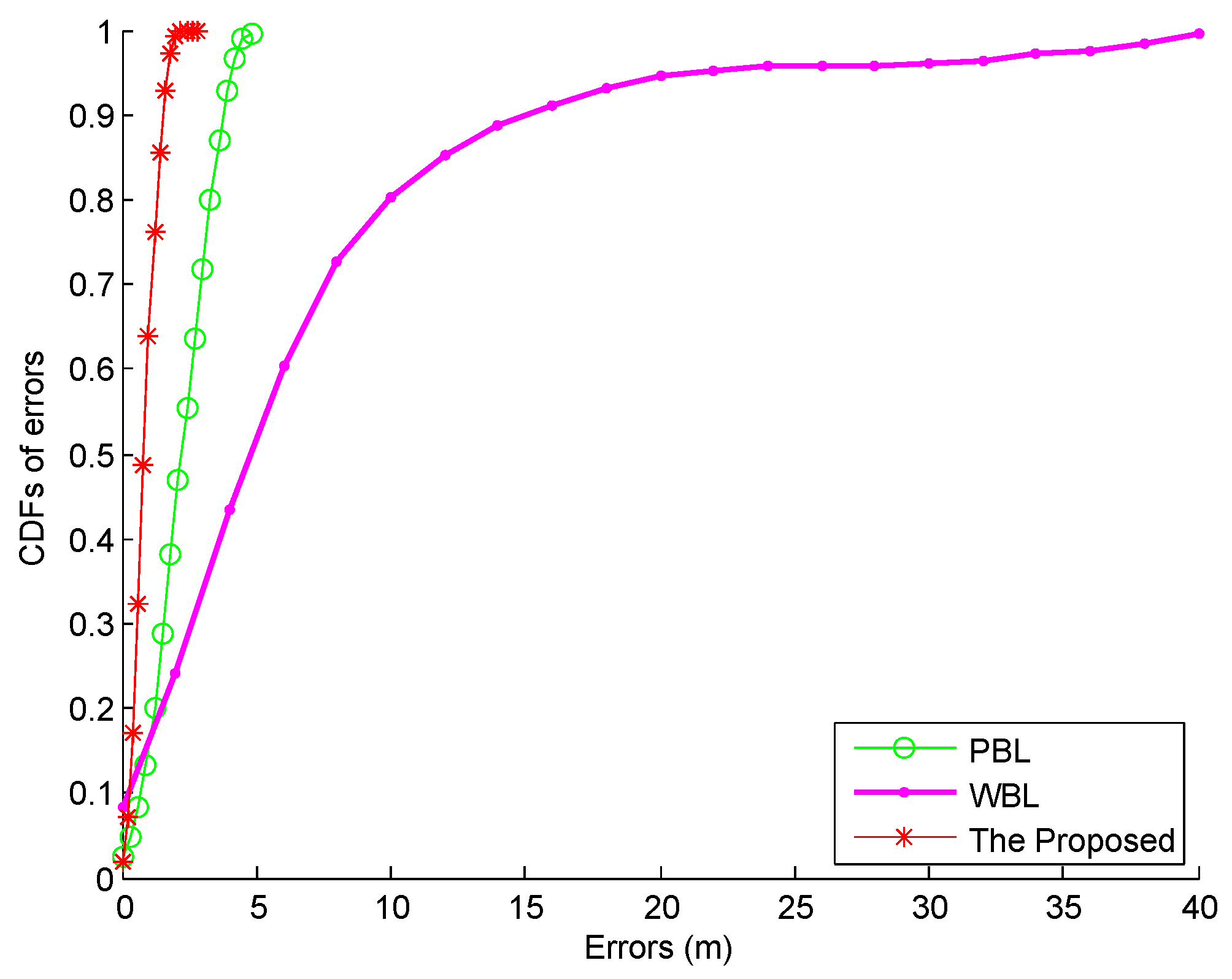
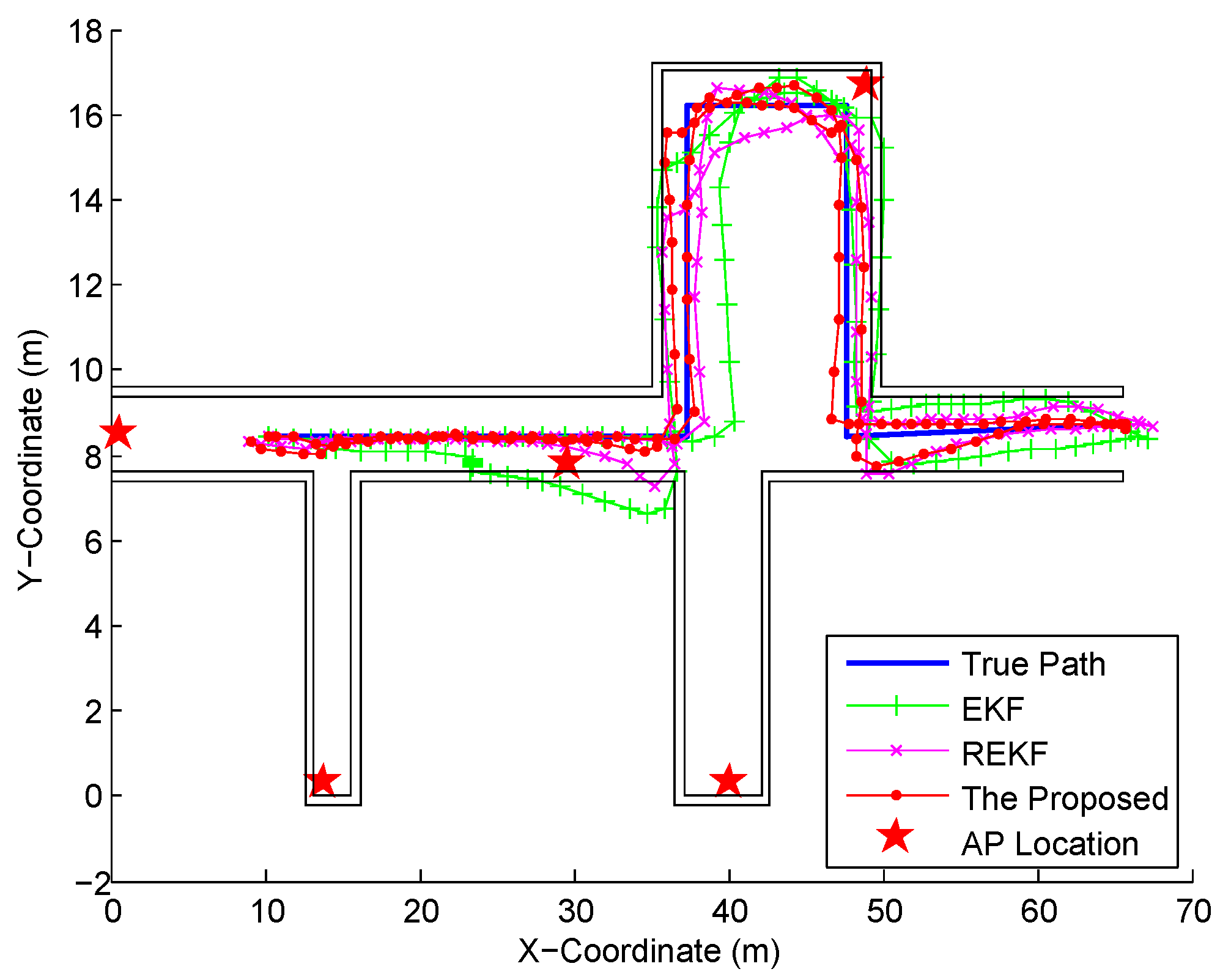
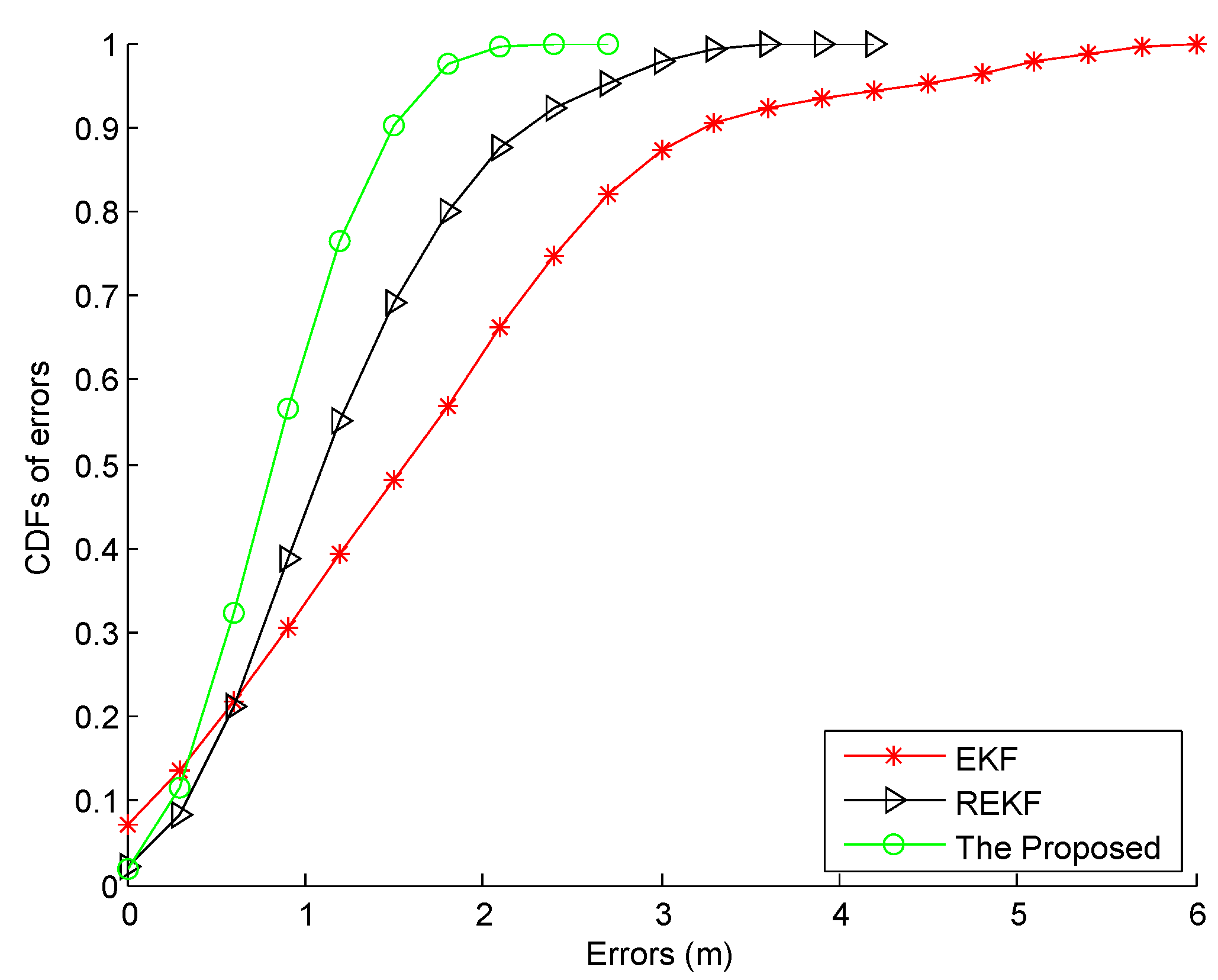
4.4. Performance of Fusion System
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bahl, P.; Padmanabhan, V.N. RADAR: An In-building RF-based User Location and Tracking System. IEEE INFOCOM 2000, 2, 775–784. [Google Scholar]
- Zhou, M.; Zhang, Q.; Xu, K.; Tian, Z.; Wang, Y.; He, W. PRIMAL: Page rank-based indoor mapping and localization using gene-sequenced unlabeled WLAN received signal strength. Sensors 2015, 15, 24791–24817. [Google Scholar] [CrossRef] [PubMed]
- Subaashini, K.; Dhivya, G.; Pitchiah, R. Zigbee RF signal strength for indoor location sensing—Experiments and results. In Proceeedings of the 14th International Conference on Advanced Communication Technology, PyeongChang, Korea, 19–22 February 2012; pp. 12–17.
- Waldmann, B.; Weigel, R.; Gulden, P. Method for high precision local positioning radar using an ultra wideband technique. In Proceeedings of the IEEE MTT-S International Microwave Symposium Digest, Atlanta, GA, USA, 15–20 June 2008; pp. 117–120.
- Athalye, A.; Savic̀, V.; Bolic̀, M.; Djuric̀, P.M. A Radio Frequency Identification System for accurate indoor localization. In Proceeedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Prague, Czech Republic, 22–27 May 2011; pp. 1777–1780.
- Gu, Y.; Ren, F. Energy-Efficient Indoor Localization of Smart Hand-Held Devices Using Bluetooth. IEEE Access 2015, 3, 1450–1461. [Google Scholar] [CrossRef]
- Li, F.; Zhao, C.; Ding, G.; Gong, J.; Liu, C.; Zhao, F. A reliable and accurate indoor localization method using phone inertial sensors. In Proceeedings of the 14th International Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; pp. 421–430.
- Dao, T.K.; Pham, T.T.; Castelli, E. A robust WLAN positioning system based on probabilistic propagation model. In Proceeedings of the 9th International Conference on Intelligent Environments, Athens, Greece, 18–19 July 2013; pp. 24–29.
- Renaudin, V.; Susi, M.; Lachapelle, G. Step Length Estimation Using Handheld Inertial Sensors. Sensors 2012, 12, 8507–8525. [Google Scholar] [CrossRef] [PubMed]
- Deng, Z.A.; Wang, G.; Hu, Y.; Wu, D. Heading estimation for indoor pedestrian navigation using a smartphone in the pocket. Sensors 2015, 15, 21518–21536. [Google Scholar] [CrossRef] [PubMed]
- Zhu, N.; Zhao, H.; Feng, W.; Wang, Z. A novel particle filter approach for indoor positioning by fusing WiFi and inertial sensors. Chin. J. Aeronaut. 2015, 28, 1725–1734. [Google Scholar] [CrossRef]
- Chen, Z.; Zou, H.; Jiang, H.; Zhu, Q.; Soh, Y.C.; Xie, L. Fusion of WiFi, smartphone sensors and landmarks using the kalman filter for indoor localization. Sensors 2015, 15, 715–732. [Google Scholar] [CrossRef] [PubMed]
- Lin, T.; Zhang, Z.; Tian, Z.; Zhou, M. Low-cost BD/MEMS tightly-coupled pedestrian navigation algorithm. Micromachines 2016, 7, 91. [Google Scholar] [CrossRef]
- Wu, D.; Xia, L.; Mok, E. Hybrid Location Estimation by Fusing WLAN Signals and Inertial Data. In Principle and Application Progress in Location-Based Services; Springer: Berlin, Germany, 2014; pp. 81–92. [Google Scholar]
- Wang, H.; Lenz, H.; Szabo, A.; Bamberger, J.; Hanebeck, U.D. WLAN-Based Pedestrian Tracking Using Particle Filters and Low-Cost MEMS Sensors. In Proceedings of the 4th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 22 March 2007; pp. 1–7.
- Tian, Z.; Fang, X.; Zhou, M.; Li, L. Smartphone-based indoor integrated WiFi/MEMS positioning algorithm in a multi-floor environment. Micromachines 2015, 6, 347–363. [Google Scholar] [CrossRef]
- Evennou, F.; Marx, F. Advanced integration of WiFi and inertial navigation systems for indoor mobile positioning. Eurasip J. Appl. Signal Process. 2006, 2006, 1–11. [Google Scholar] [CrossRef]
- Liu, X.; Man, Q.; Lu, H.; Lin, X. Wi-Fi/MARG/GPS integrated system for seamless mobile positioning. In Proceedings of IEEE Wireless Communications and Networking Conference, Shanghai, China, 7–10 April 2013; pp. 2323–2328.
- Leppäkoski, H.; Collin, J.; Takala, J. Pedestrian navigation based on inertial sensors, indoor map, and WLAN signals. In Proceedings of IEEE International Conference on Acoustics, Speech and Signal Processing, Kyoto, Japan, 25–30 March 2012; pp. 1569–1572.
- Masiero, A.; Guarnieri, A.; Pirotti, F. A Particle Filter for Smartphone-Based Indoor Pedestrian Navigation. Micromachines 2014, 5, 1012–1033. [Google Scholar] [CrossRef]
- Li, H.; Chen, X.; Jing, G.; Wang, Y.; Cao, Y.; Li, F.; Zhang, X.; Xiao, H. An indoor continuous positioning algorithm on the move by fusing sensors and Wi-Fi on smartphones. Sensors 2015, 15, 31244–31267. [Google Scholar] [CrossRef] [PubMed]
- Tian, Z.; Tang, X.; Zhou, M.; Tan, Z. Probability Distribution-Aided Indoor Positioning Algorithm Based on Affinity Propagation Clustering. In Proceedings of the 2nd International Conference on Communications, Signal Processing, and Systems, Tianjin, China, 1–2 September 2013; pp. 911–919.
- Sabatini, A.M. Quaternion-based extended Kalman filter for determining orientation by inertial and magnetic sensing. IEEE Trans. Biomed. Eng. 2006, 53, 1346–1356. [Google Scholar] [CrossRef] [PubMed]
- Yuan, X.; Yu, S.; Zhang, S.; Wang, G.; Liu, S. Quaternion-based unscented kalman filter for accurate indoor heading estimation using wearable multi-sensor system. Sensors 2015, 15, 10872–10890. [Google Scholar] [CrossRef] [PubMed]
- Tseng, S.P.; Li, W.L.; Sheng, C.Y.; Hsu, J.W.; Chen, C.S. Motion and Attitude Estimation Using Inertial Measurements with Complementary Filter. In Proceedings of the 8th Asian Control Conference—Final Program and Proceedings, Kaohsiung, Taiwan, 15–18 May 2011; pp. 863–868.
- Wang, L.; Zeng, Y.; Chen, T. Back propagation neural network with adaptive differential evolution algorithm for time series forecasting. Expert Syst. Appl. 2014, 42, 855–863. [Google Scholar] [CrossRef]
- Markley, F.L.; Crassidis, J.L. Euler Angles. In Fundamentals of Spacecraft Attitude Determination and Control; Springer New York: New York, NY, USA, 2014; pp. 361–364. [Google Scholar]
- Huang, C.; Liao, Z.; Zhao, L. Synergism of INS and PDR in self-contained pedestrian tracking with a miniature sensor module. IEEE Sens. J. 2010, 10, 1349–1359. [Google Scholar] [CrossRef]
- Mahony, R.; Hamel, T.; Pflimlin, J.M. Nonlinear complementary filters on the special orthogonal group. IEEE Trans. Autom. Control 2008, 53, 1203–1218. [Google Scholar] [CrossRef] [Green Version]
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 27 June–1 July 2011; pp. 1–7.
- Lozano, E.; Acufia, E. Parallel algorithms for distance-based and density-based outliers. In Proceedings of IEEE International Conference on Data Mining, Houston, TX, USA, 27–30 November 2005; pp. 729–732.
- Hou, S.Y.; Hung, H.S.; Kao, T.S. Extended Kalman particle filter angle tracking (EKPF-AT) algorithm for tracking multiple targets. In Proceedings of International Conference on System Science and Engineering, Taipei, Taiwan, 1–3 July 2010; pp. 216–220.
- Moore, T.; Stouch, D. A Generalized Extended Kalman Filter Implementation for the Robot Operating System. Adv. Intell. Syst. Comput. 2016, 302, 335–348. [Google Scholar]
- Zhang, H.; Qin, S.; Ma, J.; You, H. Using Residual Resampling and Sensitivity Analysis to Improve Particle Filter Data Assimilation Accuracy. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1404–1408. [Google Scholar] [CrossRef]
- Jahn, J.; Batzer, U.; Seitz, J.; Patino-Studencka, L.; Boronat, J.G. Comparison and evaluation of acceleration based step length estimators for handheld devices. In Proceedings of International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 15–17.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance Metrics | Types of Database | Orientation 1 | Orientation 2 | Orientation 3 | Orientation 4 |
|---|---|---|---|---|---|
| SD | 3.43 | 4.21 | 4.15 | 4.06 | |
| Mean error (m) | MD | 2.54 | 3.85 | 2.66 | 2.71 |
| DD | 2.40 | 2.67 | 2.31 | 2.54 | |
| SD | 3.02 | 5.52 | 3.76 | 3.94 | |
| Standard deviation of errors (m) | MD | 1.99 | 5.83 | 2.60 | 2.57 |
| DD | 1.51 | 1.97 | 2.02 | 2.22 | |
| SD | 19.57 | 31.81 | 18.63 | 21.78 | |
| Maximum error (m) | MD | 9.76 | 34.13 | 18.06 | 16.65 |
| DD | 8.21 | 10.29 | 13.67 | 12.04 | |
| SD | 4.70 | 4.60 | 4.70 | 4.60 | |
| 67% error (m) | MD | 2.90 | 3.10 | 2.90 | 3.10 |
| DD | 2.70 | 2.90 | 2.70 | 3.10 | |
| SD | 19 | 22 | 24 | 24 | |
| Probability of errors over 5 m (%) | MD | 8 | 18 | 10 | 7 |
| DD | 3 | 12 | 6 | 8 |
| Performance Metrics | WKNN | WKNN + Inverse Matching | WKNN + Inverse Matching + Improved APC |
|---|---|---|---|
| Mean error (m) | 9.41 | 4.25 | 3.41 |
| Standard deviation of errors (m) | 7.83 | 3.49 | 2.90 |
| Maximum error (m) | 38.95 | 19.01 | 16.22 |
| 67% error (m) | 10.90 | 5.30 | 4.20 |
| Performance Metrics | The Proposed Fusion | PBL | WBL |
|---|---|---|---|
| Mean error (m) | 0.85 | 2.22 | 6.79 |
| Standard deviation of errors (m) | 0.44 | 1.05 | 7.69 |
| 67% error (m) | 1.05 | 2.95 | 6.93 |
| 90% error (m) | 1.56 | 3.81 | 15.10 |
| Performance Metrics | The Proposed Fusion | REKF | EKF |
|---|---|---|---|
| Mean error (m) | 0.85 | 1.21 | 1.68 |
| Standard deviation of errors (m) | 0.44 | 0.71 | 1.21 |
| 67% error (m) | 1.05 | 1.48 | 2.25 |
| 90% error (m) | 1.56 | 2.25 | 3.28 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, Z.; Jin, Y.; Zhou, M.; Wu, Z.; Li, Z. Wi-Fi/MARG Integration for Indoor Pedestrian Localization. Sensors 2016, 16, 2100. https://doi.org/10.3390/s16122100
Tian Z, Jin Y, Zhou M, Wu Z, Li Z. Wi-Fi/MARG Integration for Indoor Pedestrian Localization. Sensors. 2016; 16(12):2100. https://doi.org/10.3390/s16122100
Chicago/Turabian StyleTian, Zengshan, Yue Jin, Mu Zhou, Zipeng Wu, and Ze Li. 2016. "Wi-Fi/MARG Integration for Indoor Pedestrian Localization" Sensors 16, no. 12: 2100. https://doi.org/10.3390/s16122100
APA StyleTian, Z., Jin, Y., Zhou, M., Wu, Z., & Li, Z. (2016). Wi-Fi/MARG Integration for Indoor Pedestrian Localization. Sensors, 16(12), 2100. https://doi.org/10.3390/s16122100