
An Optical Fiber Displacement Sensor Using RF Interrogation Technique


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
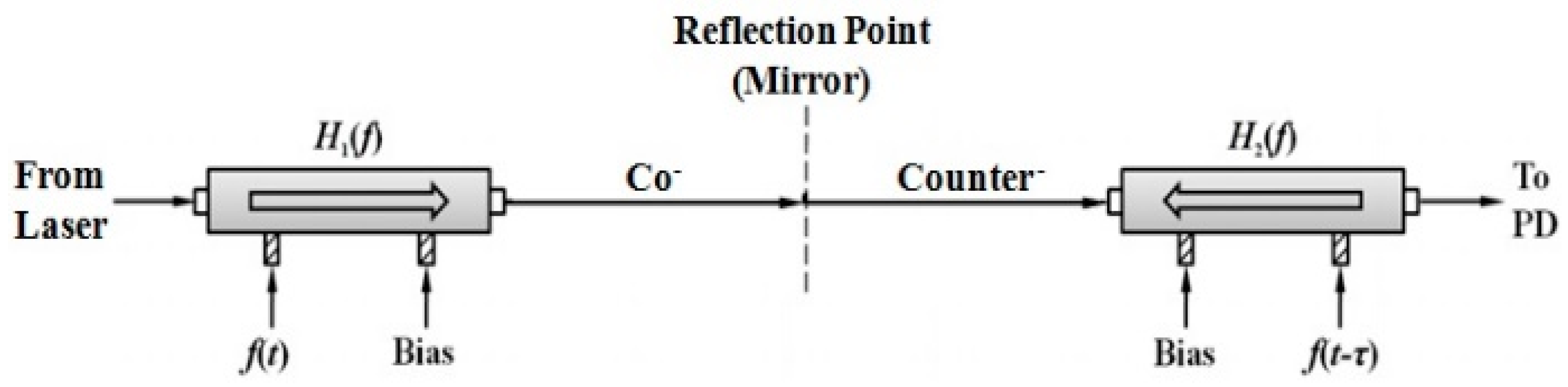
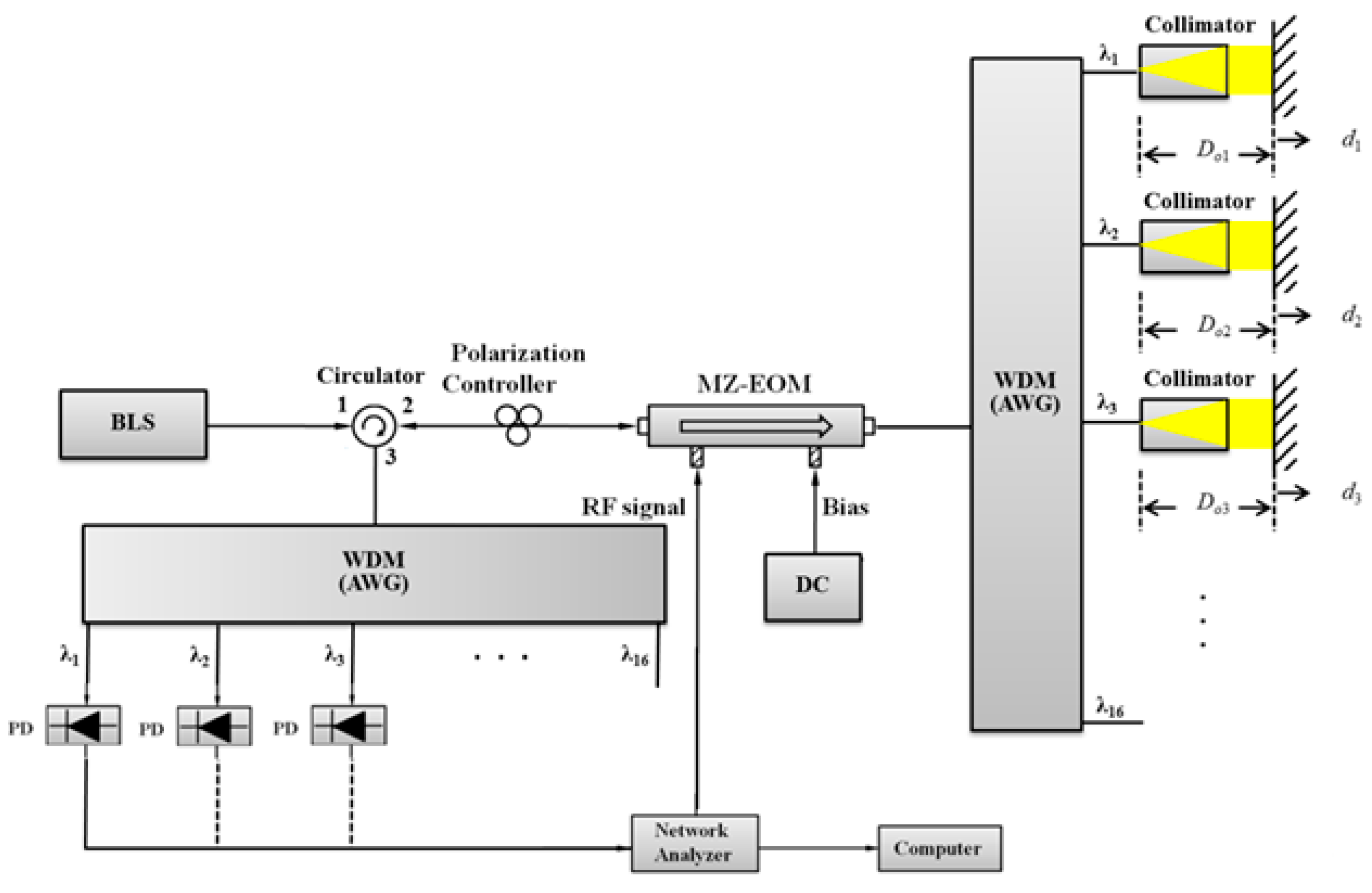
2. Sensor Structure and Operating Principle
3. Measurements and Results
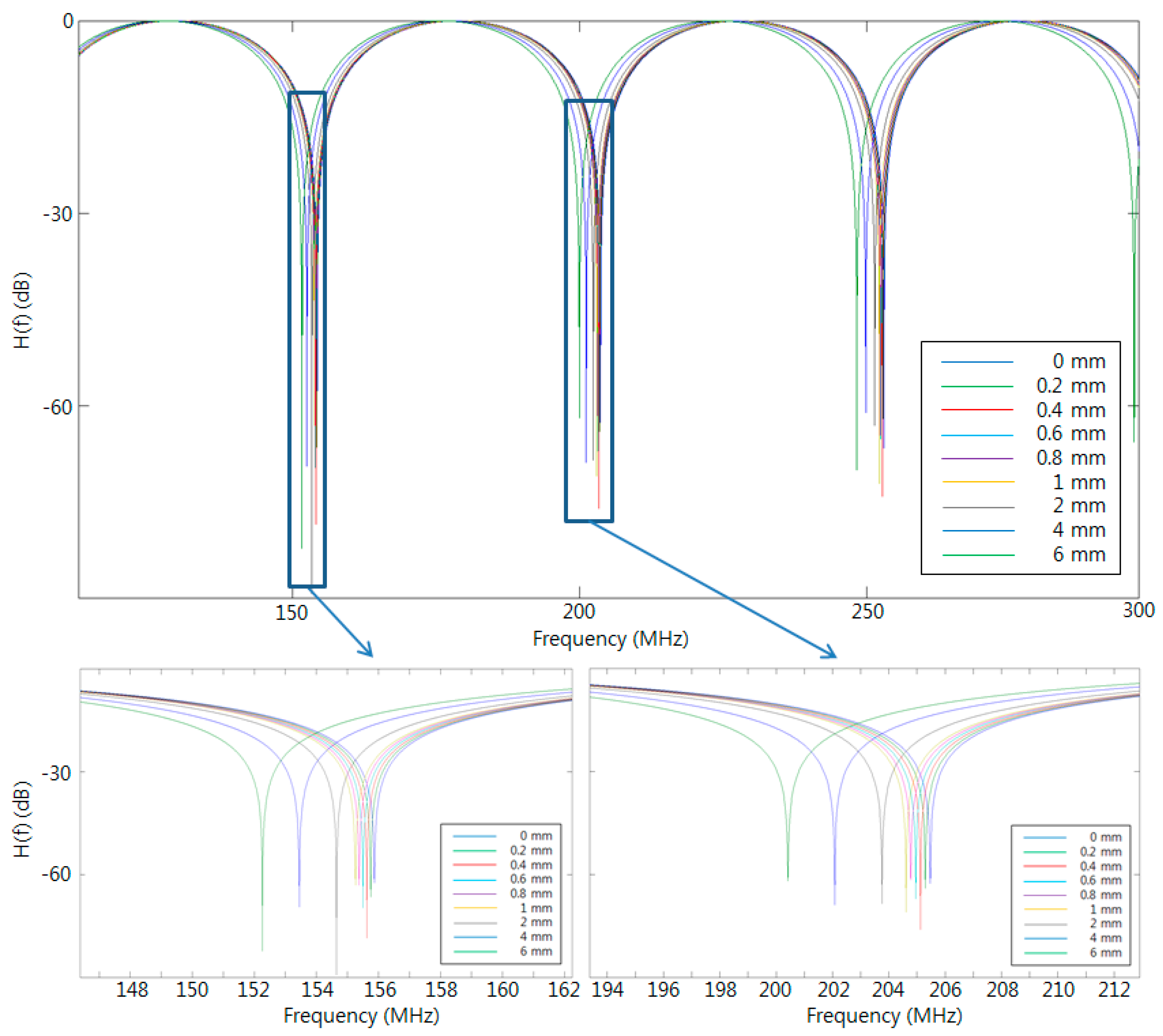
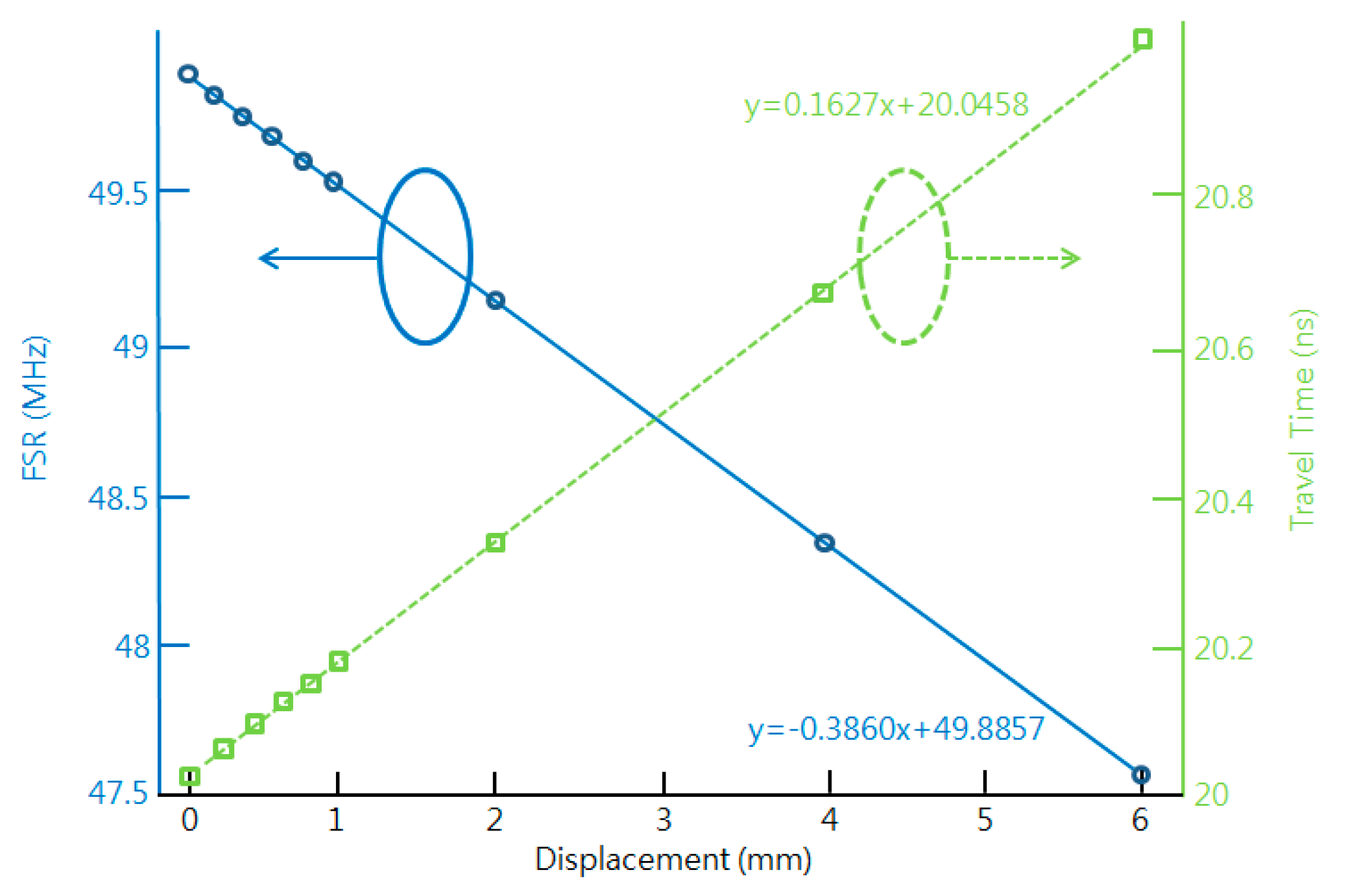
3.1. Simulation Results
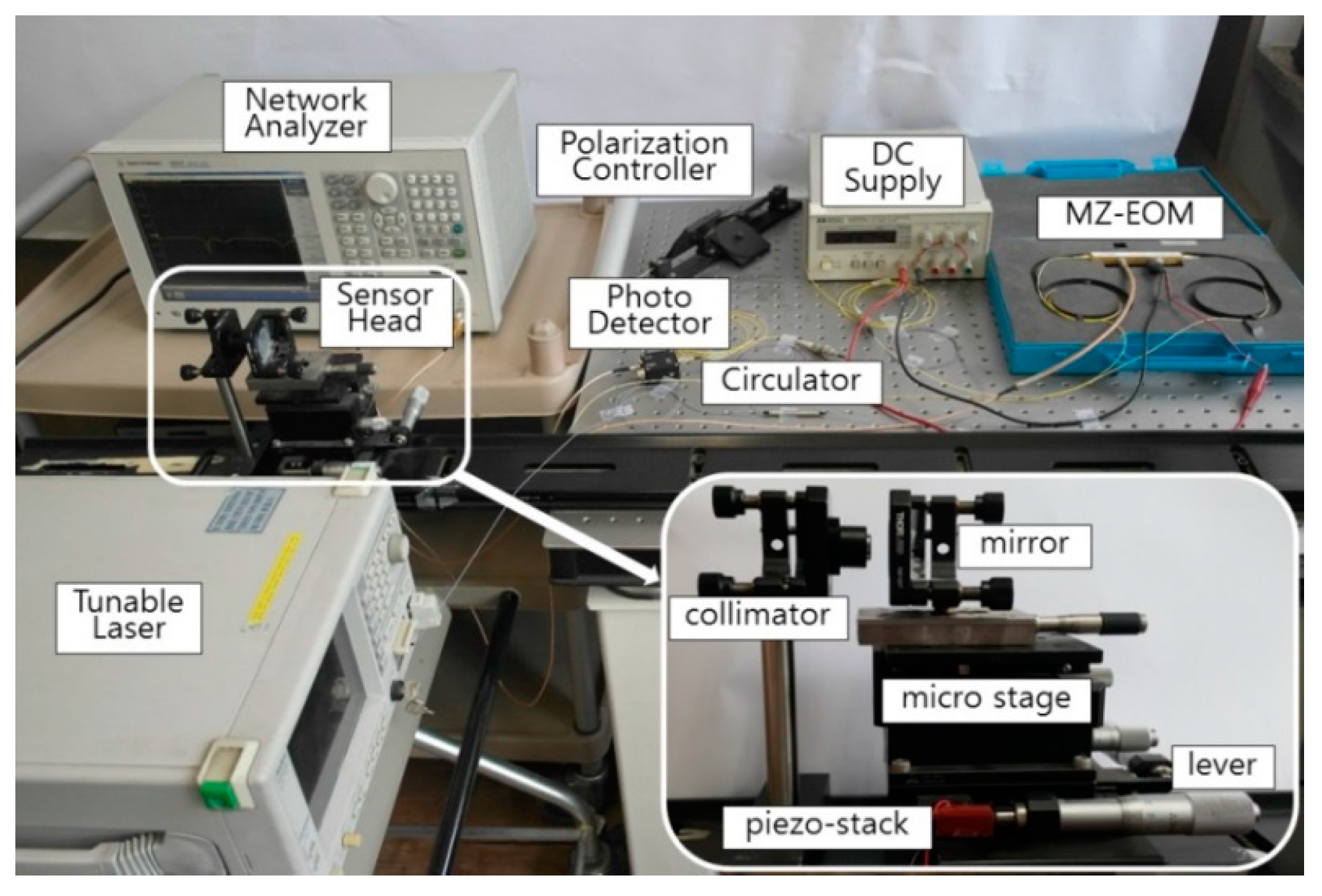
3.2. Experimental Results
3.3. Performance Limits
3.4. Optical Power Budget
3.5. Multiplexing Characteristic
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Girão, P.M.B.S.; Postolache, O.A.; Faria, J.A.B.; Pereira, J.M.C.D. An overview and a contribution to the optical measurement of linear displacement. IEEE Sens. J. 2001, 1, 322–331. [Google Scholar] [CrossRef]
- Chen, J.P.; Zhou, J.; Yuan, X.C. M-Z interferometer constructed by two S-bend fibers for displacement and force measurements. IEEE Photon. Tech. Lett. 2014, 26, 837–840. [Google Scholar] [CrossRef]
- Chen, J.P.; Zhou, J.; Jia, Z.H. High-sensitivity displacement sensor based on a bent fiber Mach-Zehnder interferometer. IEEE Photon. Tech. Lett. 2013, 25, 2354–2357. [Google Scholar] [CrossRef]
- Wu, J.X.; Miao, Y.P.; Song, B.B.; Lin, W.; Zhang, K.L.; Zhang, H.; Liu, B.; Yao, J.Q. Simultaneous measurement of displacement and temperature based on thin-core fiber modal interferometer. Opt. Commun. 2013, 340, 136–140. [Google Scholar] [CrossRef]
- Zhang, Y.N.; Zhao, Y.; Wang, Q. Improved design of slow light interferometer and its application in FBG displacement sensor. Sens. Actuators A: Phys. 2014, 214, 168–174. [Google Scholar] [CrossRef]
- Bravo, M.; Angulo-Vinuesa, X.; Martin-Lopez, S.; López-Amo, M.; González-Herráez, M. Slow-light and enhanced sensitivity in a displacement sensor using a lossy fiber-based ring resonator. IEEE J. Lightwave Tech. 2013, 31, 3752–3757. [Google Scholar] [CrossRef]
- Mi, H.K.; Nan, Q.M. Study on magnetic coupling FBG displacement sensor. In Proceedings of the 2011 International Conference on Mechatronics and Automation (ICMA), Beijing, China, 7–10 August 2011.
- Li, T.L.; Tan, Y.G.; Zhou, Z.; Cai, L.; Liu, S.; He, Z.G.; Zheng, K. Study on the non-contact FBG vibration sensor and its application. Photon. Sens. 2015, 5, 128–136. [Google Scholar] [CrossRef]
- Berkovic, G.; Shafir, E. Optical methods for distance and displacement measurements. Adv. Opt. Photon. 2012, 4, 441–471. [Google Scholar] [CrossRef]
- Yang, H.Z.; Qiao, X.G.; Luo, D.; Lim, K.S.; Chong, W.Y.; Harun, S.W. A review of recent developed and applications of plastic fiber optic displacement sensors. Measurement 2014, 48, 333–345. [Google Scholar] [CrossRef]
- Casalicchio, M.L.; Neri, A.; Perrone, G.; Tosi, D.; Vallan, A. Non-contact low-cost fiber distance sensor with compensation of target reflectivity. In Proceedings of the 2009 Instrumentation and Measurement Technology Conference (I2MTC’09), Singapore, 5–7 May 2009.
- Vallan, A.; Casalicchio, M.L.; Perrone, B. Displacement and acceleration measurements in vibration tests using a fiber optic sensor. IEEE Trans. Inst. Meas. 2010, 59, 1389–1396. [Google Scholar] [CrossRef]
- Yang, C.; Oyadiji, S.O. Theoretical and experimental study of self-reference intensity-modulated plastic fibre optic linear array displacement sensor. Sens. Actuators A: Phys. 2015, 222, 67–79. [Google Scholar] [CrossRef]
- Shan, M.; Rui, M.; Zhi, Z.; Ying, W.; Yabin, Z. Differential reflective fiber-optic angular displacement sensor. Optics Laser Tech. 2013, 68, 124–128. [Google Scholar] [CrossRef]
- Jackson, D.A.; Posada-Roman, J.E.; Garcia-souto, J.A. New topologies for fiber laser non-contact vibrometers. In Proceedings of the 2014 IEEE Sensors, Valencia, Spain, 2–5 November 2014.
- Orłowska, K.; Słupski, P.; Šwiatkowski, M.; Kunicki, P.; Sankowska, A. Light intensity fibre optic sensor for MEMS displacement and vibration metrology. Optics Laser Tech. 2015, 65, 159–163. [Google Scholar] [CrossRef]
- Moreno-Hernández, C.J.; Monzón-Hernández, D.; Martínez-Ríos, A.; Moreno-Hernández, D.; Villatoro, J. Long-range interferometric displacement sensing with tapered optical fiber tips. IEEE Phton. Tech. Lett. 2015, 27, 379–382. [Google Scholar] [CrossRef]
- Razak, M.Z.A.; Reduan, S.A.; Sharbirin, A.S.; Jamaludin, N.M.; Zulkifli, Z.; Ahmad, H. Non-contact optical displacement sensor using an adiabatic U-shaped tapered fiber. IEEE Sens. J. 2015, 15, 5388–5392. [Google Scholar] [CrossRef]
- Jeon, K.S.; Kim, H.J.; Kang, D.S.; Pan, J.K. Optical fiber chromatic dispersion measurement using bidirectional modulation of an optical intensity modulator. IEEE Photon. Tech. Lett. 2002, 14, 1145–1147. [Google Scholar] [CrossRef]
- Choi, S.J.; Mao, W.K.; Pan, J.K. Novel RF interrogation of a fiber Bragg grating sensor using bidirectional modulation of a Mach-Zehnder electro-optical modulator. Sensors 2013, 13, 8403–8411. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.H.; Choi, S.J.; Jeon, K.S.; Pan, J.K. An implementation of non-contact optical fiber displacement sensor using bidirectional modulation of a Mach-Zehnder electro-optical modulator. In Proceedings of the 5th Asia-Pacific Optical Sensors Conference (5th APOS), Jeju, Korea, 20–22 May 2015.















© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.-H.; Choi, S.-J.; Jeon, K.S.; Pan, J.-K. An Optical Fiber Displacement Sensor Using RF Interrogation Technique. Sensors 2016, 16, 277. https://doi.org/10.3390/s16030277
Kim H-H, Choi S-J, Jeon KS, Pan J-K. An Optical Fiber Displacement Sensor Using RF Interrogation Technique. Sensors. 2016; 16(3):277. https://doi.org/10.3390/s16030277
Chicago/Turabian StyleKim, Hyeon-Ho, Sang-Jin Choi, Keum Soo Jeon, and Jae-Kyung Pan. 2016. "An Optical Fiber Displacement Sensor Using RF Interrogation Technique" Sensors 16, no. 3: 277. https://doi.org/10.3390/s16030277
APA StyleKim, H. -H., Choi, S. -J., Jeon, K. S., & Pan, J. -K. (2016). An Optical Fiber Displacement Sensor Using RF Interrogation Technique. Sensors, 16(3), 277. https://doi.org/10.3390/s16030277