
Laser Spot Detection Based on Reaction Diffusion


 ,
,  and
and 
Abstract
:1. Introduction
2. The Reaction Diffusion System
3. Laser Spot Centering
3.1. Conventional Algorithm for Laser Spot Centroid Calculations
- An image acquired from a CCD camera is transformed into a single channel 8-bit gray image
- A simple thresholding is applied to produce a binary image. Each pixel with a value greater than is set to
- Using the binary data we can find the outer contour of the spot. The topology information, such as nested contours, is skipped for the sake of simplicity
- Now we can calculate the center of mass of the area surrounded by this contour using the definition of the centroid:where is an image matrix
3.2. RD-FHN Laser Spot Centering
3.2.1. Exemplification of the FHN-Based Computation
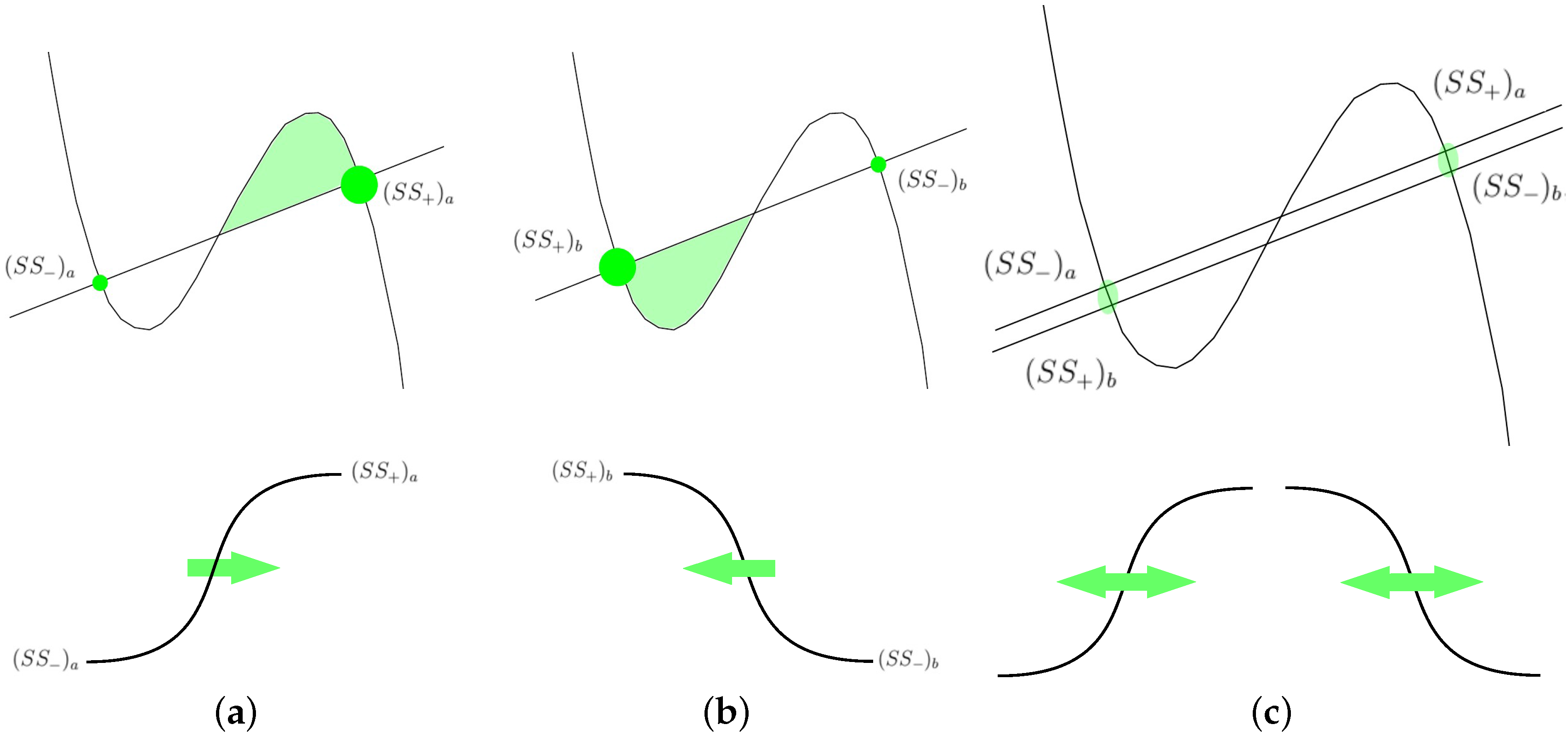
- First, a two-dimensional integration grid, where each cell has a bistable nullcline configuration similar to the one depicted in Figure 2a is prepared. As initial conditions, the concentration values of for all the grid points are set in the less stable state . As a result of this configuration, the system remains static in those levels of concentration for all cells in the integration grid.
- Then, a geometric figure is introduced in the model using . This means that for a few cell points corresponding to the shape of the desired pattern, the values of are set in . Consequently, a frontwave will be triggered, as can be seen in the series of Figure 3a–c, where the model is evolving from towards . The diffusive term in Equation (2) explains this movement. Although the asymptotic behaviour is defined by the nullcline configuration, when a cell point changes its concentration levels it transfers this change to its neighbor’s by means of the diffusive link between them. Hence, the global result is a wavefront that moves the whole system towards .
- Depending of the particular algorithm used, the END condition for the current phase will be different. For instance, it can be stopped after a specific number of iterations, or wait until the model stops its evolution after reaching a static situation. Thus, in the previous step the spatio-temporal evolution was arbitrarily stopped after 1000 iterations.
- Finally, switching the nullcline configuration to the one depicted in Figure 2b produces a shift in the relative stability of the stable states. What in the previous step was now becomes , and vice versa. This is possible due to the fact that the stable points in both configurations are very close to each other, as depicted in Figure 2c, where both configurations were superimposed. Therefore, after a short period of adaptation, becomes , and becomes . As can be expected, the system starts evolving all its grid points towards the concentration values of , corresponding to the new . In short, the original wavefront changes its direction of propagation. This process can be seen in the series of Figure 3c–e, where the model evolution was again stopped after 1000 iterations.
3.2.2. Thresholding Camera Data
3.2.3. Algorithm Description
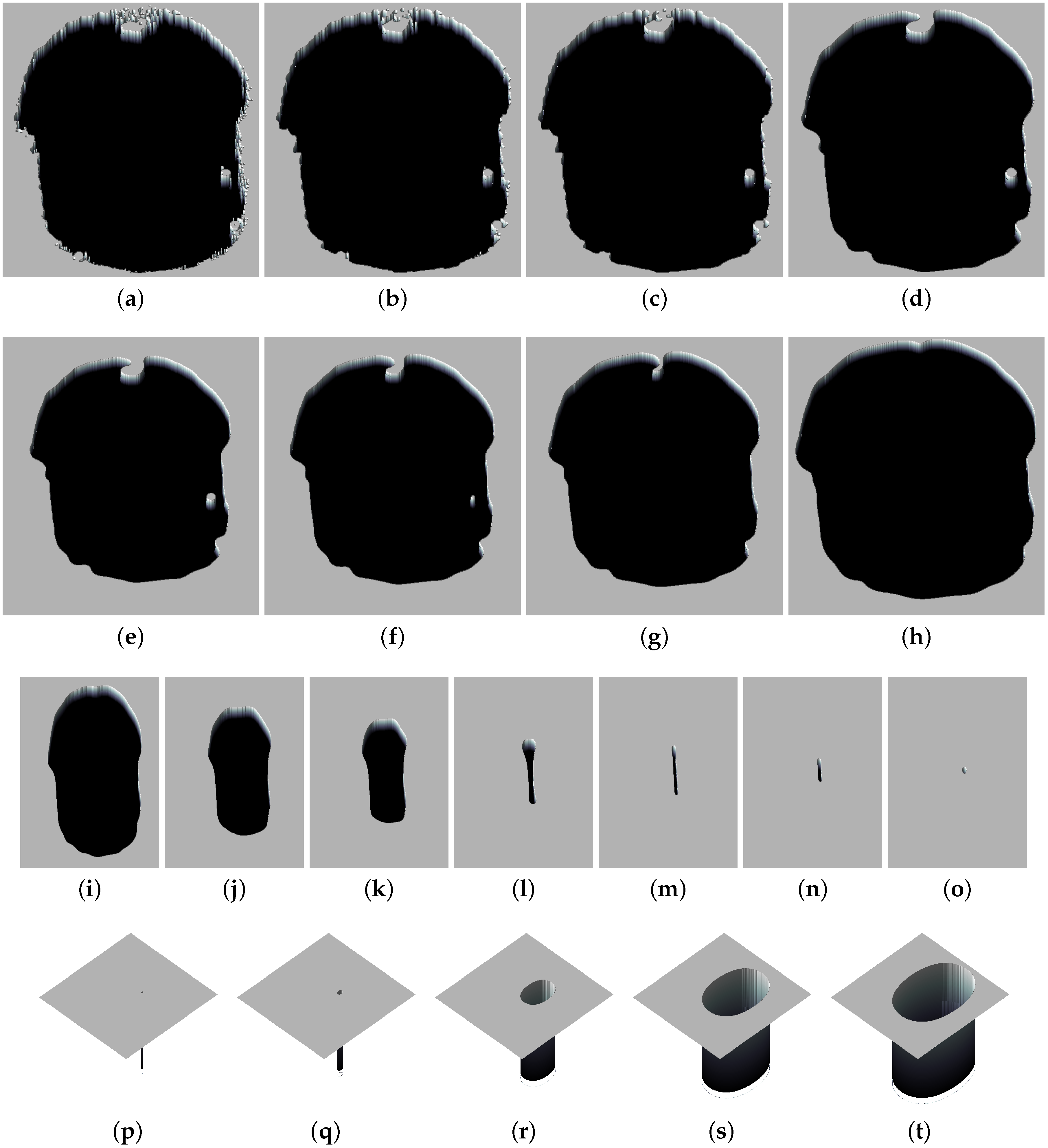
- Firstly, a contraction phase where the result of the model evolution will be removal of the background noise. Besides, the edges of the beam section become smoother. An exemplification of this process is depicted in the series of pictures in Figure 5a–d. This phase runs for only 1500 iterations, a value that was determined experimentally.
- The second phase, an expansion in this case, removes all the remaining patches of wavefronts that appear as isolated regions and also further smooths the contour of the laser beam. This process can be seen in the series of pictures depicted in Figure 5e–h. In this case, 5000 iterations is the appropriate value.
- The third phase is again a contraction, where the wavefront representing the laser beam contour retracts over itself, decreasing its size until the supposed laser spot center. The result of this phase is a small spot that coincides with the centering of the laser beam. The process is shown in the series of pictures depicted in Figure 5i–o. The end condition of this phase is determined by the system reaching a static situation in the model evolution. The main reason underlying this behaviour is the constant speed of the wavefront propagation; therefore, the velocity of contraction is the same in all directions.
- A final expansion phase results in the growth of the small spot that was achieved in the previous step until it reaches the size of the supposed original laser beam contour. Although this phase is non-essential for obtaining the coordinates of the laser spot, it shows how the FHN-based computational approach is able to process geometric information. The process is represented in the last series of pictures shown in Figure 5p–t. In this last case, the number of iterations varies according to the desired size of the beam section, from which it is also trivial to extract the beam contour.
4. Results and Discussion
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Turing, A.M. The Chemical Basis of Morphogenesis. Philos. Trans. R. Soc. Lond. Ser. B Biol. Sci. 1952, 237, 37–72. [Google Scholar] [CrossRef]
- Vanag, V.K.; Epstein, I.R. Pattern formation mechanisms in reaction-diffusion systems. Int. J. Dev. Biol. 2009, 53, 673–683. [Google Scholar] [CrossRef] [PubMed]
- Epstein, I.R.; Berenstein, I.B.; Dolnik, M.; Vanag, V.K.; Yang, L.; Zhabotinsky, A.M. Coupled and forced patterns in reaction-diffusion systems. Philos. Trans. R. Soc. A: Math. Phys. Eng. Sci. 2008, 366, 397–408. [Google Scholar] [CrossRef] [PubMed]
- Krinsky, V.I.; Biktashev, V.N.; Efimov, I.R. Autowave principles for parallel image processing. Phys. D 1991, 49, 247–253. [Google Scholar] [CrossRef]
- Kuhnert, L.; Aglazde, K.I.; Krinsky, V.I. Image-Processing Using Light-Sensitive Chemical Waves. Nature 1989, 337, 244–247. [Google Scholar] [CrossRef]
- Steinbock, O.; Kettunen, P.; Showalter, K. Engineering of dynamical systems for pattern recognition and information processing. J. Phys. Chem. 1996, 100, 18970–18975. [Google Scholar] [CrossRef]
- Perez-Munuzuri, V.; Perez-Villar, V.; Chua, L. Autowaves for image processing on a two-dimensional CNN array of excitable nonlinear circuits: Flat and wrinkled labyrinths. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1993, 40, 174–181. [Google Scholar] [CrossRef]
- Steinbock, O.; Showalter, K.; Kettunen, P. Navigating complex labyrinths: Optimal paths from chemical waves. Science 1994, 100, 868–871. [Google Scholar] [CrossRef] [PubMed]
- Adamatzky, A.; Holland, O. Voronoi-like Nondeterministic Partition of a Lattice by Collectives of Finite Automata. Math. Comput. Model. 1998, 28, 73–93. [Google Scholar] [CrossRef]
- De Lacy Costello, B.; Ratcliffe, N.; Adamatzky, A.; Zanin, A.L.; Liehr, A.W.; Purwins, H.G. The Formation of Voronoi Diagrams in Chemical and Physical Systems: Experimental findings and theoretical models. Int. J. Bifurc. Chaos 2004, 14, 2187–2210. [Google Scholar] [CrossRef]
- Muñuzuri, A.P.; Vázquez-Otero, A. The CNN solution to the shortest-path-finder problem. In Proceedings of the 11th International Workshop On Cellular Neural Networks and Their Applications, Santiago de Compostela, Spain, 14–16 July 2008; pp. 248–251.
- Adamatzky, A.; De Lacy Costello, B.; Asai, T. Reaction-Diffusion Computers; Elsevier Science: Philadelphia, PA, USA, 2005. [Google Scholar]
- Vázquez-Otero, A.; Faigl, J.; Munuzuri, A.P. Path planning based on reaction-diffusion process. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura-Algarve, Portugal, 7–11 October 2012; pp. 896–901.
- Vázquez-Otero, A.; Faigl, J.; Duro, N.; Dormido, R. Reaction-Diffusion based Computational Model for Autonomous Mobile Robot Exploration of Unknown Environments. Int. J. Unconv. Comput. 2014, 4, 295–316. [Google Scholar]
- Vázquez-Otero, A.; Faigl, J.; Dormido, R.; Duro, N. Reaction Diffusion Voronoi Diagrams: From Sensors Data to Computing. Sensors 2015, 15, 12736–12764. [Google Scholar] [CrossRef] [PubMed]
- Dong, H.; Wang, L. Non-Iterative Spot Center Location Algorithm Based on Gaussian for Fish-Eye Imaging Laser Warning System. Optik 2012, 123, 2148–2153. [Google Scholar] [CrossRef]
- Mourou, G.A.; Korn, G.; Sandner, W.; Collier, J.L. ELI White Book; Andreas Thoss: Meudon Cedex, France, 2011. [Google Scholar]
- Fitzhugh, R. Impulses and Physiological States in Theoretical Models of Nerve Membrane. Biophys. J. 1961, 1, 445–466. [Google Scholar] [CrossRef]
- Nagumo, J.; Arimoto, S.; Yoshizawa, S. An Active Pulse Transmission Line Simulating Nerve Axon. Proc. IRE 1962, 50, 2061–2070. [Google Scholar] [CrossRef]
- Ruifang, Y.; Chun, L.; Zhenheng, L.; Xizhao, L.; Xiaolan, C.; Yuanquing, H. New Algorithm of Sub-pixel Locating Laser Spot Center. In Proceedings of the 4th International Symposium on Advanced Optical Manufacturing and Testing Technologies: Advanced Optical Manufacturing Technologies, Chengdu, China, 20 May 2009.
- Cui, J.W.; Tan, J.B.; Ao, L.; Kang, W.J. Optimized Algorithm of Laser Spot Center Location in Strong Noise. J. Phys. Conf. Ser. 2005, 13, 312–315. [Google Scholar] [CrossRef]
- Russell, S.J.; Norvig, P. Artificial Intelligence: A Modern Approach; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Vázquez-Otero, A.; Muñuzuri, A.P. Navigation algorithm for autonomous devices based on biological waves. In Proceedings of the 2010 12th International Workshop on the Cellular Nanoscale Networks and Their Applications (CNNA), Berkeley, CA, USA, 3–5 February 2010; pp. 1–5.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FHN Parameters | ||||||
|---|---|---|---|---|---|---|
| Phase | contraction | 5 | 0.1 | 10 | 0.1 | 1.5 |
| expansion | 4 | −0.5 | 40 | 0.45 | 2 | |
| contraction | 5 | 0.1 | 10 | 0.1 | 1.5 | |
| expansion | 5 | −0.2 | 10 | 0.1 | 1.5 | |
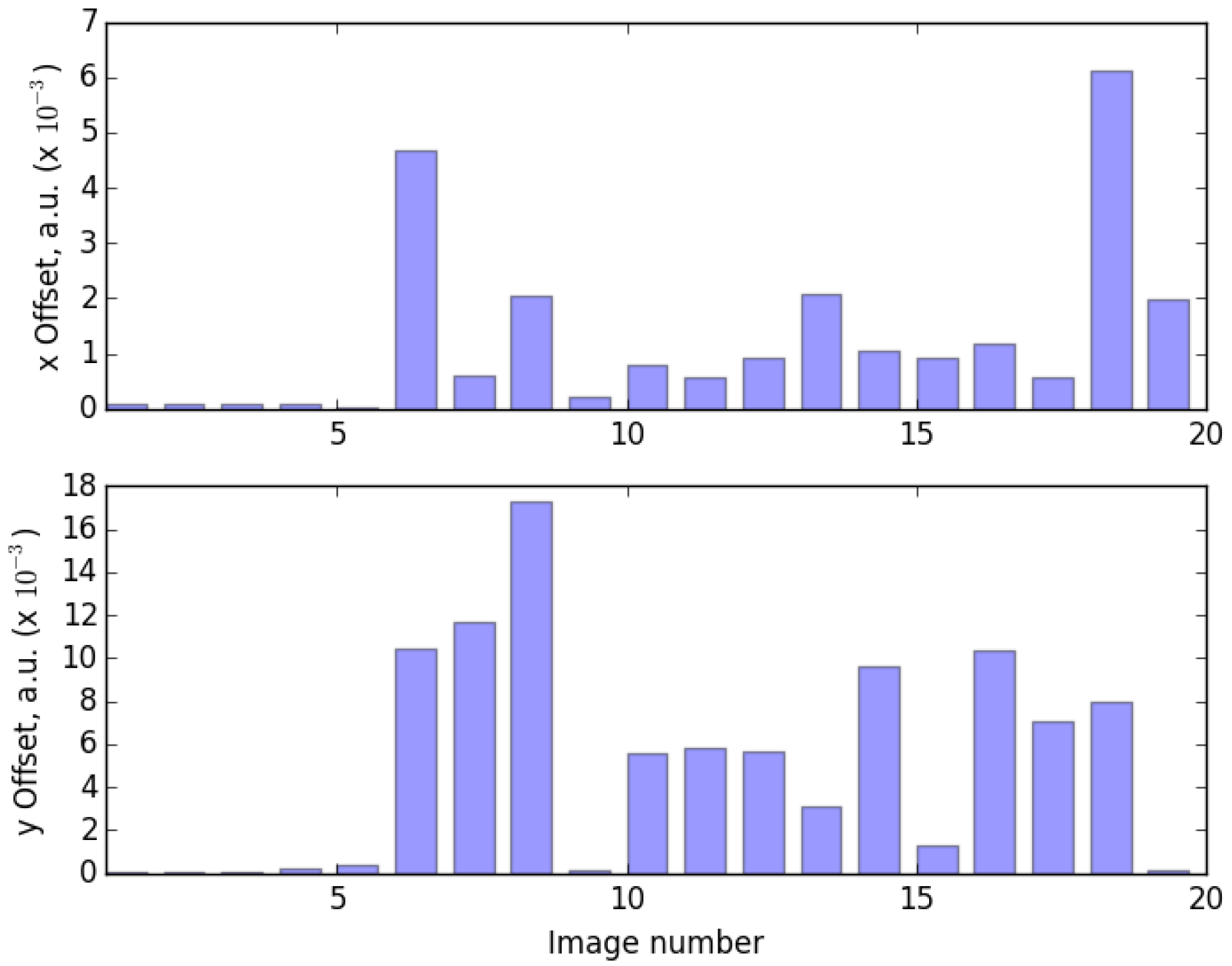
| Centroid Coordinates | |||||||
|---|---|---|---|---|---|---|---|
| IMM x | IMM y | RD x | RD y | Offset x () | Offset y () | ||
| Image | 1 | 342.330 | 584.317 | 342.452 | 584.337 | −0.095 | −0.021 |
| 2 | 353.200 | 590.375 | 353.304 | 590.349 | −0.081 | 0.027 | |
| 3 | 342.330 | 584.317 | 342.452 | 584.337 | −0.095 | −0.021 | |
| 4 | 366.411 | 585.350 | 366.306 | 585.524 | 0.082 | −0.181 | |
| 5 | 373.349 | 594.326 | 373.339 | 594.661 | 0.008 | −0.349 | |
| 6 | 568.699 | 552.488 | 562.710 | 562.493 | 4.679 | −10.422 | |
| 7 | 649.642 | 536.352 | 648.890 | 547.549 | 0.588 | −11.664 | |
| 8 | 646.670 | 599.226 | 644.034 | 615.806 | 2.059 | −17.271 | |
| 9 | 131.899 | 460.435 | 132.180 | 460.296 | −0.220 | 0.145 | |
| 10 | 662.283 | 453.218 | 661.256 | 458.574 | 0.802 | −5.579 | |
| 11 | 662.263 | 453.169 | 661.517 | 458.714 | 0.583 | −5.776 | |
| 12 | 662.642 | 453.075 | 661.465 | 458.493 | 0.920 | −5.644 | |
| 13 | 213.383 | 477.399 | 216.049 | 480.340 | −2.083 | −3.064 | |
| 14 | 655.300 | 510.910 | 653.975 | 520.126 | 1.035 | −9.600 | |
| 15 | 187.473 | 472.137 | 188.648 | 473.333 | −0.918 | −1.246 | |
| 16 | 655.563 | 511.081 | 654.045 | 520.999 | 1.186 | −10.331 | |
| 17 | 625.730 | 463.174 | 624.991 | 469.963 | 0.577 | −7.072 | |
| 18 | 578.307 | 531.479 | 586.126 | 523.829 | −6.109 | 7.969 | |
| 19 | 574.611 | 380.773 | 577.164 | 380.872 | -1.995 | -0.103 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vázquez-Otero, A.; Khikhlukha, D.; Solano-Altamirano, J.M.; Dormido, R.; Duro, N. Laser Spot Detection Based on Reaction Diffusion. Sensors 2016, 16, 315. https://doi.org/10.3390/s16030315
Vázquez-Otero A, Khikhlukha D, Solano-Altamirano JM, Dormido R, Duro N. Laser Spot Detection Based on Reaction Diffusion. Sensors. 2016; 16(3):315. https://doi.org/10.3390/s16030315
Chicago/Turabian StyleVázquez-Otero, Alejandro, Danila Khikhlukha, J. M. Solano-Altamirano, Raquel Dormido, and Natividad Duro. 2016. "Laser Spot Detection Based on Reaction Diffusion" Sensors 16, no. 3: 315. https://doi.org/10.3390/s16030315
APA StyleVázquez-Otero, A., Khikhlukha, D., Solano-Altamirano, J. M., Dormido, R., & Duro, N. (2016). Laser Spot Detection Based on Reaction Diffusion. Sensors, 16(3), 315. https://doi.org/10.3390/s16030315