
Planar Position Sensor Based on Mono Sensing Electrode and Hybrid-Frequency Excitation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theory and Principle
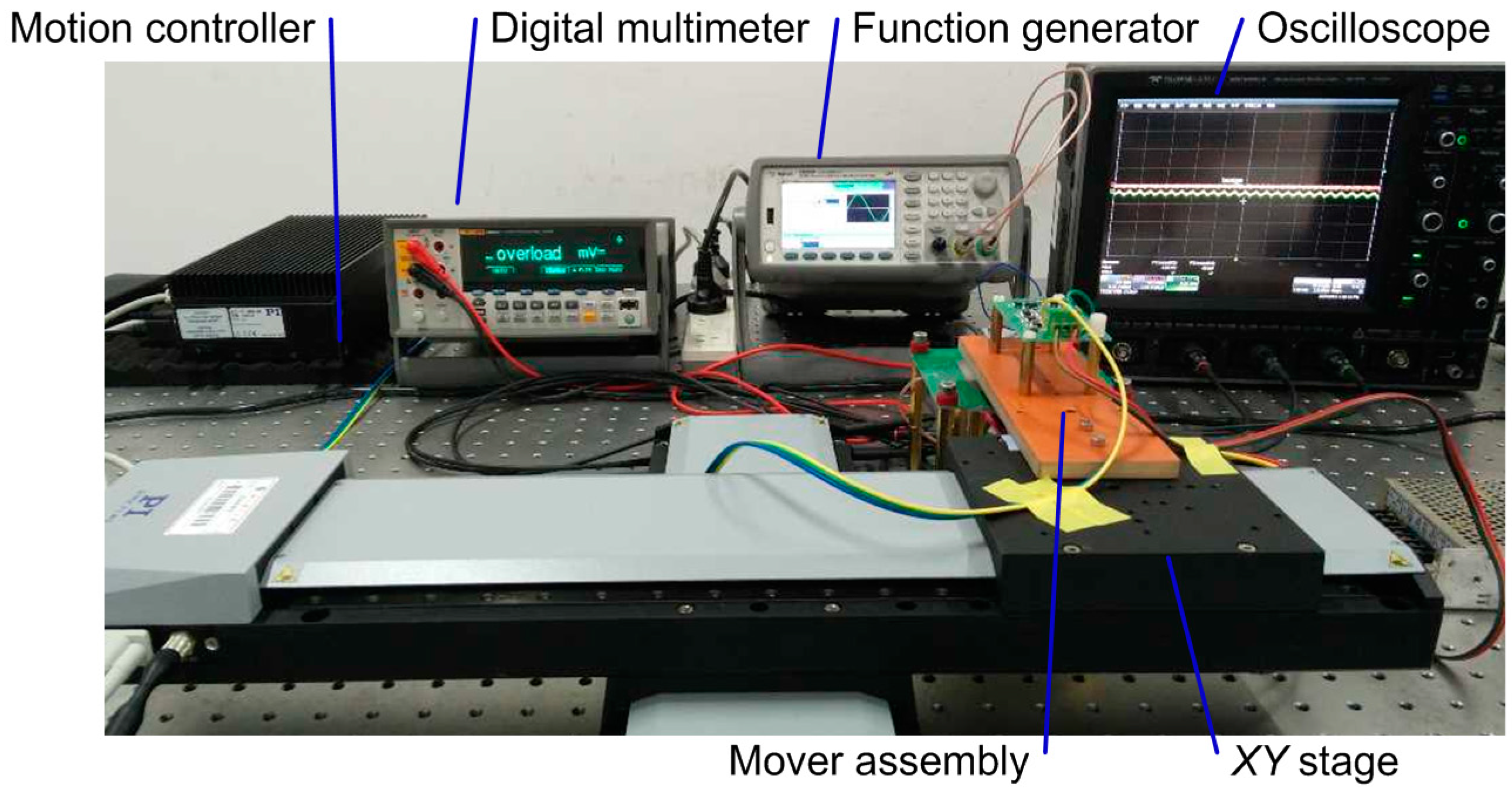
3. Prototype and Experimental Setup
4. Results and Discussion
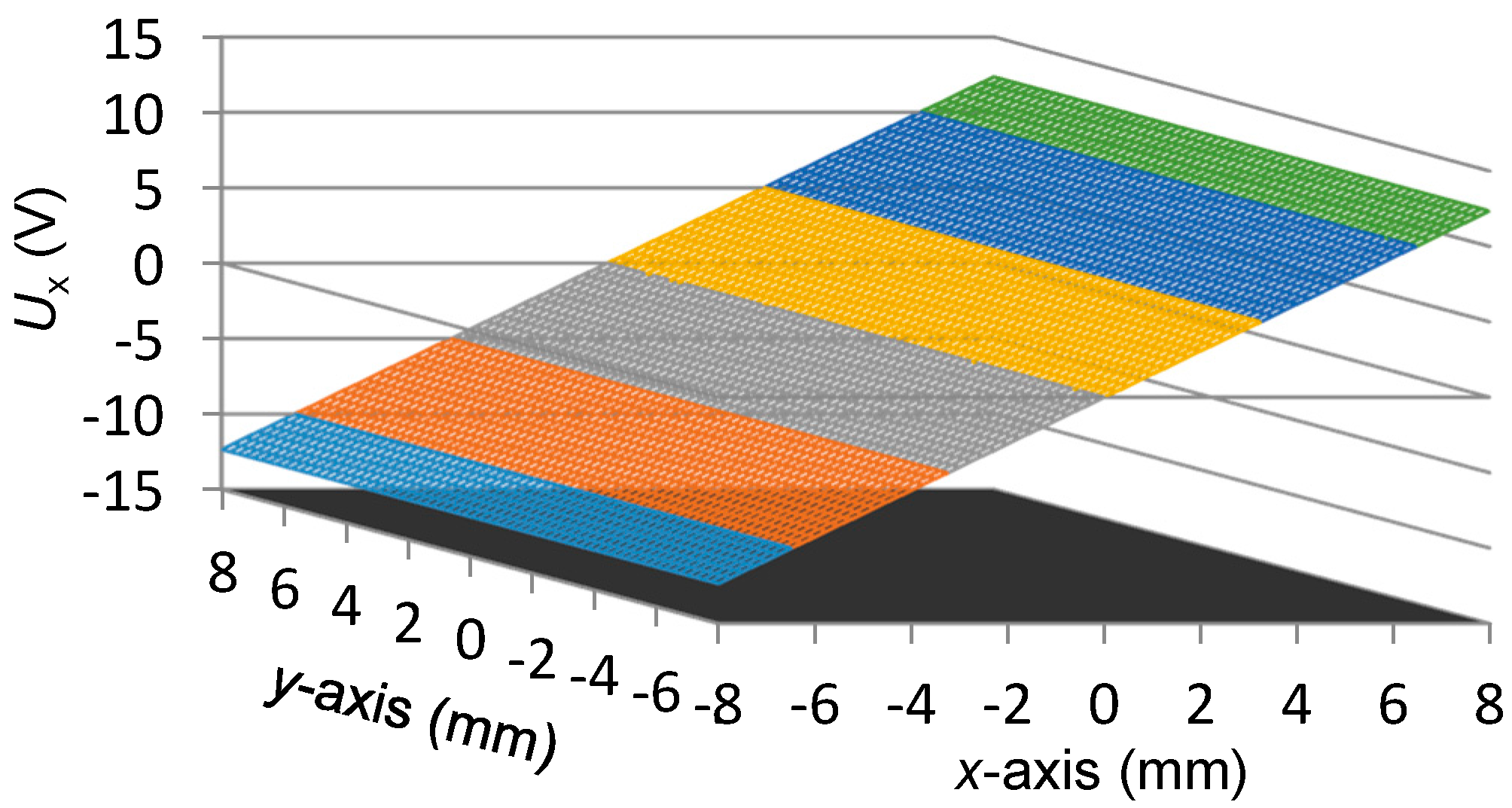
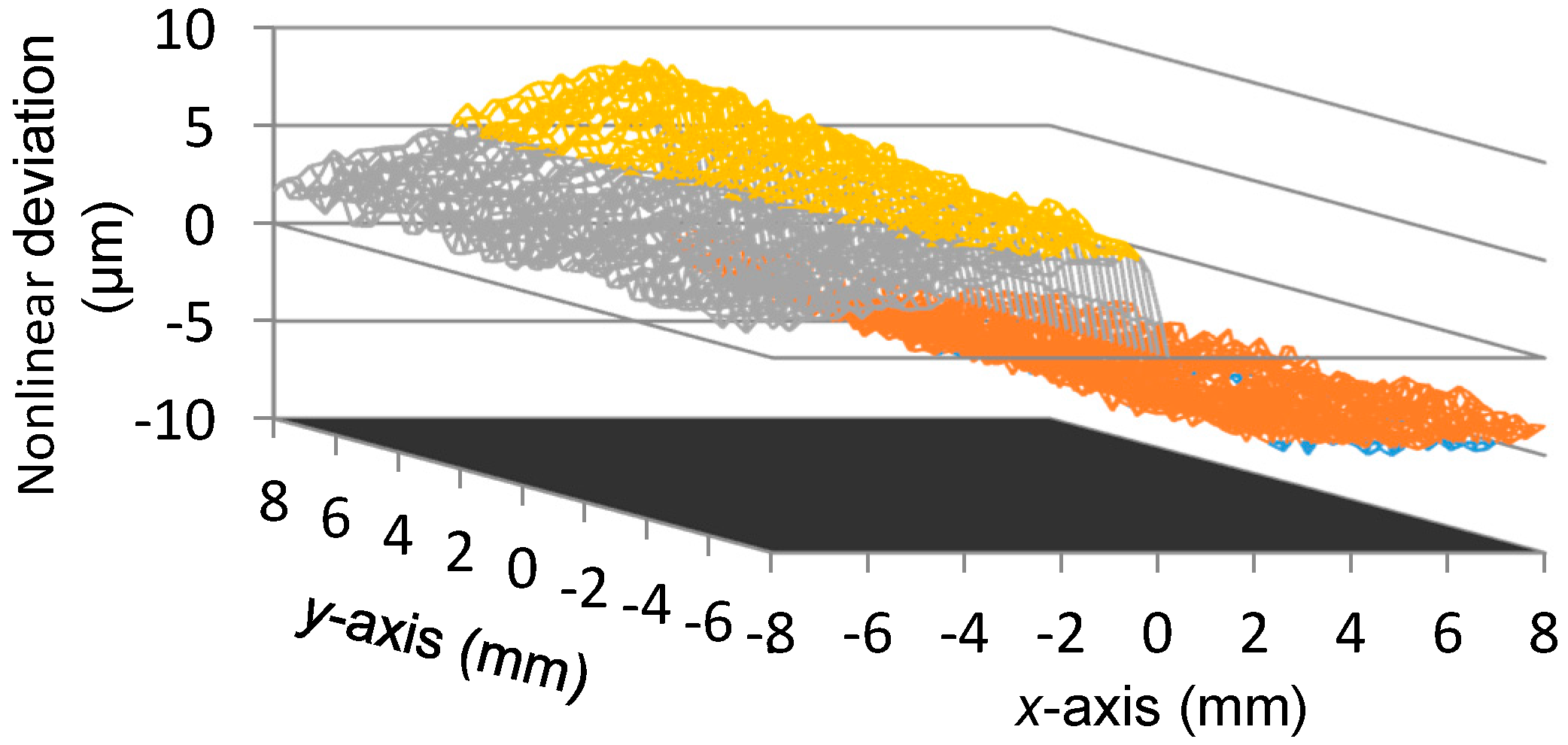
- The peak-to-peak value of Ux is about 24.7139 V, thus the displacement sensitivity for the x-axis position is about 1.54 mV per micron. The variation of Ux is almost linearly related to the x-axis position, however, a nonlinear deviation with a level of 0.0087 mm to −0.0058 mm exists in Ux, which is approximately 0.11% of the full measurement range in the x-axis direction.
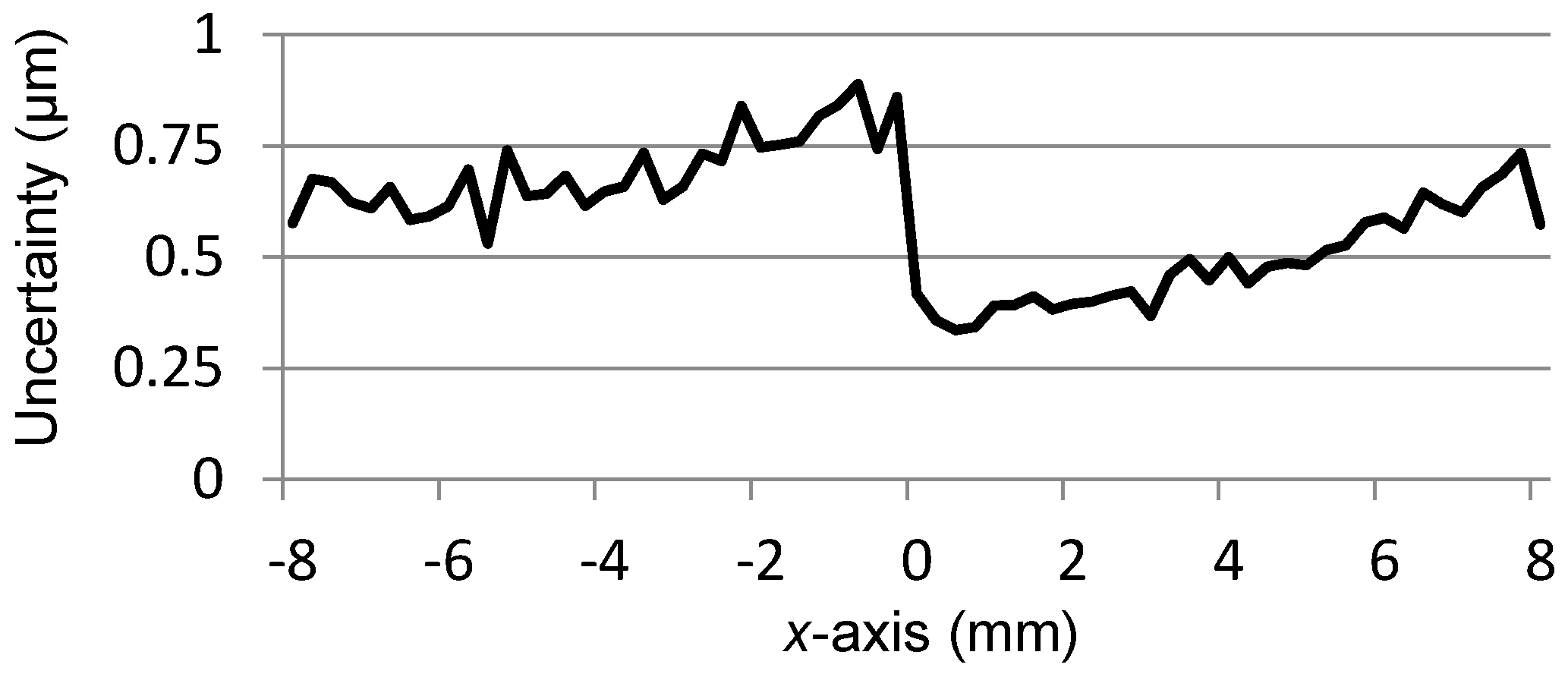
- To evaluate the independence of Ux with respect to the transition that occurs in the y-axis direction, for each scanning position in the x-axis, the outputs of Ux at all the 65 positions of the y-axis, as shown in Figure 6, are adopted for the calculation of the uncertainty of x-coordinate readings. The utilized method is the standard deviation and the result is presented in Figure 8, where the maximum value is 0.0009 mm. It indicates that the transition of the mover in the y-axis direction merely affects the measurement result of the x-coordinate.
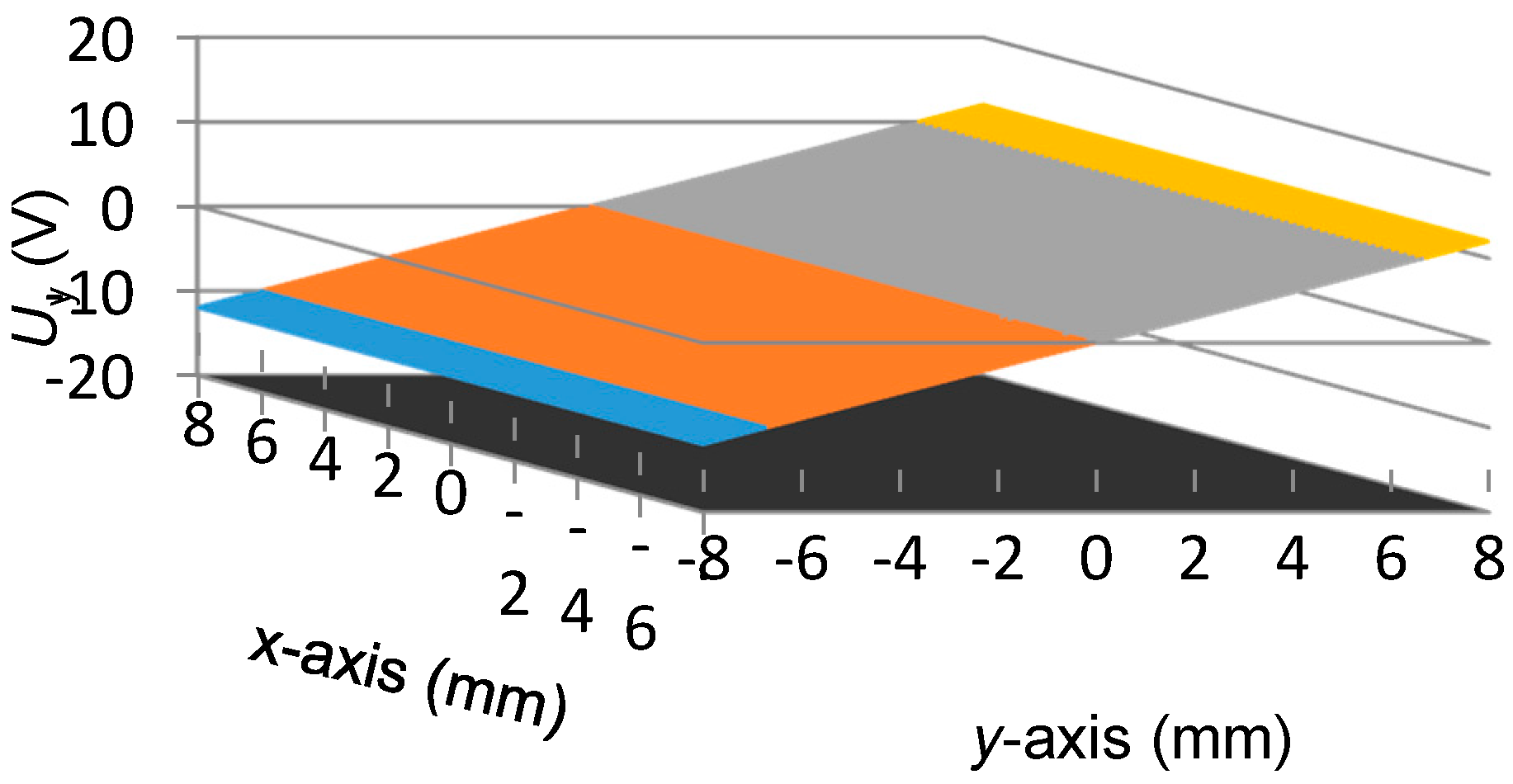
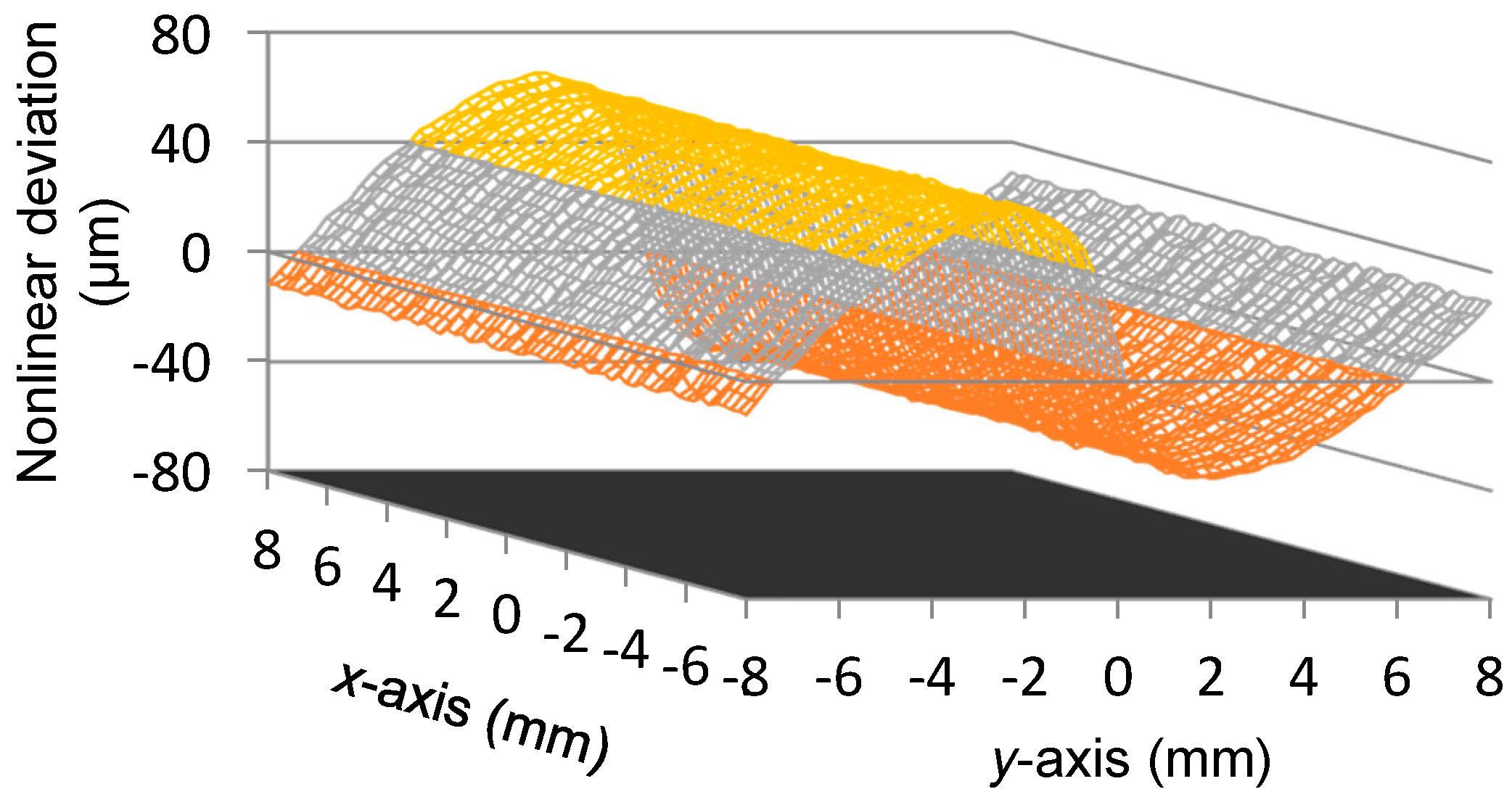
- The peak-to-peak value of Uy is 24.0039 V, thus the displacement sensitivity for the y-axis position is about 1.50 mV per micron. The variation of Uy is basically linear with respect to the y-axis position. A nonlinear deviation with a level of 0.066 mm to −0.037 mm exists in Uy, which is approximately 0.82% of the full measurement range in the y-axis direction.
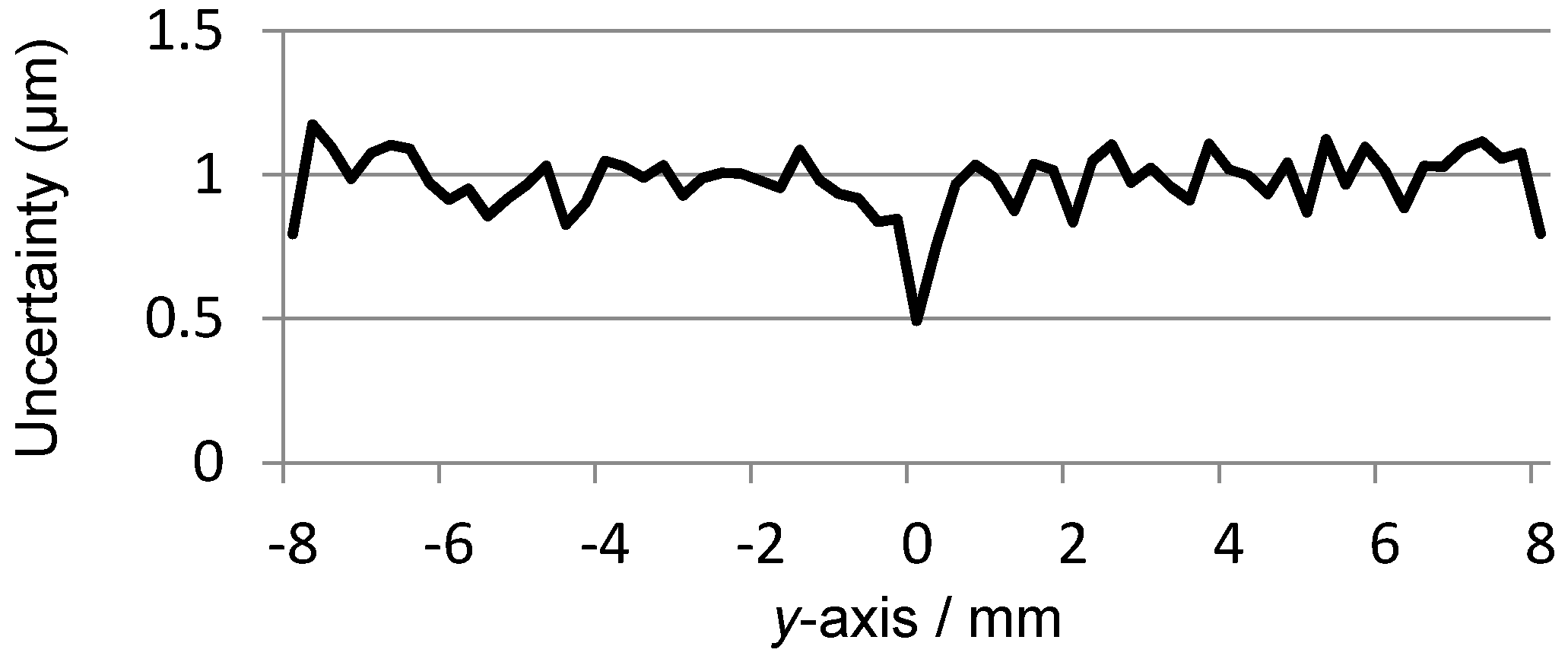
- Similarly, to evaluate the independence of Uy, for each scanning position in the y-axis, the outputs of Uy at all the 65 positions of the x-axis, as shown in Figure 9, are adopted for the calculation of the uncertainty of the y-coordinate readings. The result is presented in Figure 11, where the maximum value is 0.0012 mm. Thus the transition in the x-axis direction displays no evident influence on the measurement results of the y-coordinate.
- Even though the displacement sensitivity and readings uncertainty show no significant differences between the two measurement directions, the nonlinear deviation suffers a sharp rise for the y-coordinate readings compared with the response of the x-axis. Considering the same signal processing circuit, such a diversity could be caused by the different excitation frequencies assigned for x-axis position sensing and for y-axis position sensing, namely the 100 kHz and the 950 kHz.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| PCB | Printed circuit board |
| 2D | Two dimension |
| AC | Alternative current |
| DC | Direct current |
References
- Gao, W.; Kim, S.W.; Bosse, H.; Haitjema, H.; Chen, Y.L.; Lu, X.D.; Knapp, W.; Weckenmann, A.; Estler, W.T.; Kunzmann, H. Measurement technologies for precision positioning. CIRP Ann. Manuf. Technol. 2015, 64, 773–796. [Google Scholar] [CrossRef]
- Yang, P.; Takamura, T.; Takahashi, S.; Takamasu, K.; Sato, O.; Osawa, S.; Takatsuji, T. Development of high-precision micro-coordinate measuring machine: Multi-probe measurement system for measuring yaw and straightness motion error of XY linear stage. Precis. Eng. 2011, 35, 424–430. [Google Scholar] [CrossRef]
- Mariko, K.; Kaoru, M. Calibration of linear encoders with sub-nanometer uncertainty using an optical-zooming laser interferometer. Precis. Eng. 2014, 38, 769–774. [Google Scholar]
- Huang, W.S.; Liu, C.W.; Hsu, P.L.; Yeh, S.S. Precision Control and Compensation of Servomotors and Machine Tools via the Disturbance Observer. IEEE Trans. Ind. Electr. 2010, 57, 420–429. [Google Scholar] [CrossRef]
- Shirinzadeh, B.; Teoh, P.L.; Tian, Y.; Dalvand, M.M.; Zhong, Y.; Liaw, H.C. Laser interferometry-based guidance methodology for high precision positioning of mechanisms and robots. Robot. Comsput. Integr. Manuf. 2010, 26, 74–82. [Google Scholar] [CrossRef]
- Brown, D.; Friedrich, D.; Bruckner, F.; Carbone, L.; Schnabel, R.; Freise, A. Invariance of waveguide grating mirrors to lateral displacement phase Shifts. Opt. Lett. 2013, 38, 1844–1846. [Google Scholar] [CrossRef] [PubMed]
- Smith, P.T.; Vallance, R.R.; Marsh, E. Correcting capacitive displacement measurement in metrology applications with cylindrical artefacts. Precis. Eng. 2005, 29, 324–335. [Google Scholar] [CrossRef]
- Meyer, H.U. An integrated capacitive position sensor. IEEE Trans. Instrum. Meas. 1996, 45, 521–525. [Google Scholar] [CrossRef]
- Liu, C.H.; Cheng, C.H. Development of a grating based multi-degree-of freedom laser linear encoder using diffracted light. Sens. Actuators A Phys. 2012, 181, 87–93. [Google Scholar] [CrossRef]
- Liu, Y.M.; Yuan, M.Q.; Cao, J.R.; Cui, J.W.; Tan, J.B. Use of Two Planar Gratings to Measure 3-DOF Displacements of Planar Moving Stage. IEEE Trans. Instrum. Meas. 2015, 64, 163–169. [Google Scholar]
- Thurner, T.; Zechner, C. Phase-based algorithm for 2D displacement estimation of laser speckle patterns. In Proceedings of the IEEE Instrumentation and Measurement Technology Conference Proceedings, Victoria, BC, Canada, 12–15 May 2008; pp. 2173–2178.
- Ioan, A.I.; Mihai, A.; Guillaume, J.L. High Dynamics and Precision Optical Measurement Using a Position Sensitive Detector (PSD) in Reflection-Mode: Application to 2D Object Tracking over a Smart Surface. Sensors 2012, 12, 16771–16784. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.P.; Wang, W.; Lu, K.Q.; Mei, D.Q.; Chen, Z.C. A planar capacitive sensor for 2D long-range displacement measurement. J. Zhejiang Univ. Sci. C 2013, 14, 252–257. [Google Scholar] [CrossRef]












© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; Zhang, Y.; Shen, M.; Zhang, H.; Gao, Z.; Wang, D. Planar Position Sensor Based on Mono Sensing Electrode and Hybrid-Frequency Excitation. Sensors 2016, 16, 691. https://doi.org/10.3390/s16050691
Yu H, Zhang Y, Shen M, Zhang H, Gao Z, Wang D. Planar Position Sensor Based on Mono Sensing Electrode and Hybrid-Frequency Excitation. Sensors. 2016; 16(5):691. https://doi.org/10.3390/s16050691
Chicago/Turabian StyleYu, Hongxiang, Yu Zhang, Mengfeng Shen, Hongli Zhang, Zhao Gao, and Dongyun Wang. 2016. "Planar Position Sensor Based on Mono Sensing Electrode and Hybrid-Frequency Excitation" Sensors 16, no. 5: 691. https://doi.org/10.3390/s16050691
APA StyleYu, H., Zhang, Y., Shen, M., Zhang, H., Gao, Z., & Wang, D. (2016). Planar Position Sensor Based on Mono Sensing Electrode and Hybrid-Frequency Excitation. Sensors, 16(5), 691. https://doi.org/10.3390/s16050691