
Blind RSSD-Based Indoor Localization with Confidence Calibration and Energy Control

Abstract
:
1. Introduction
2. RSSD-Based Localization Method
2.1. Empirical Path Loss Models
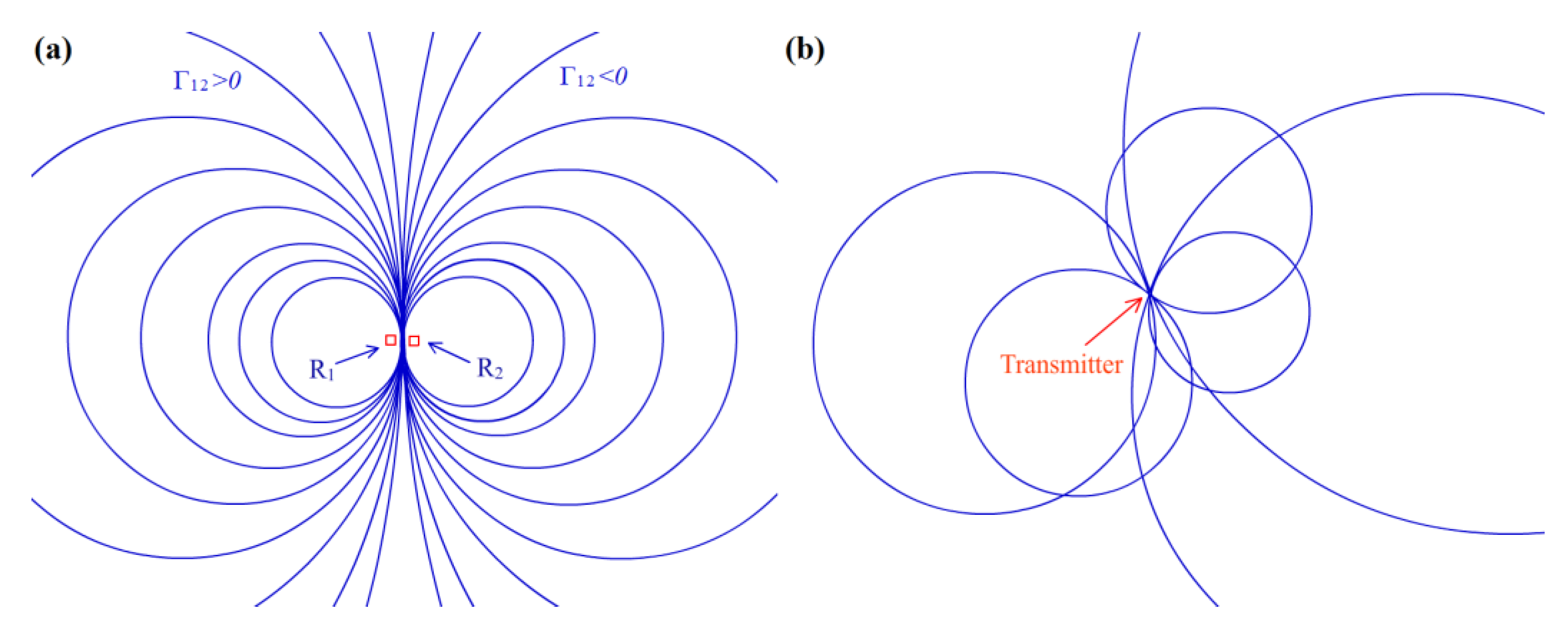
2.2. Received Signal Strength Difference
2.3. Least Squares Solution
3. Confidence Calibration
3.1. Confidence Construction
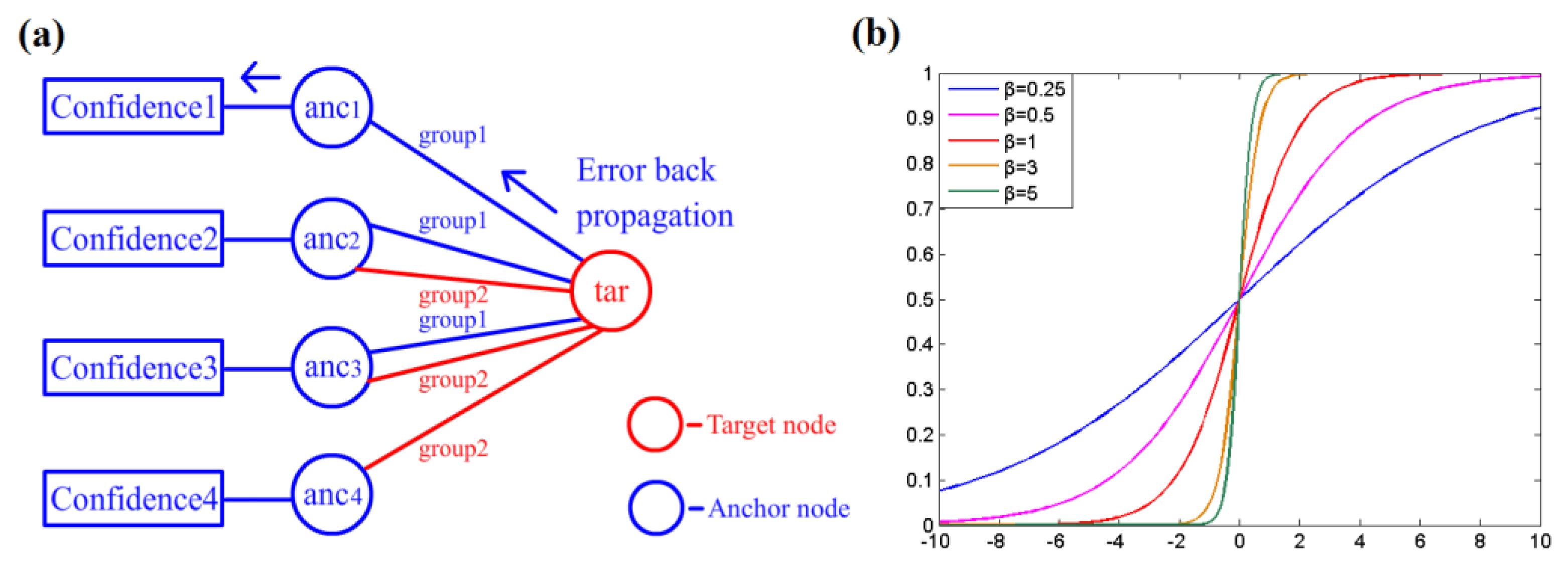
3.2. Back Propagation Learning
3.3. Automatic Calibration
4. Target Localization
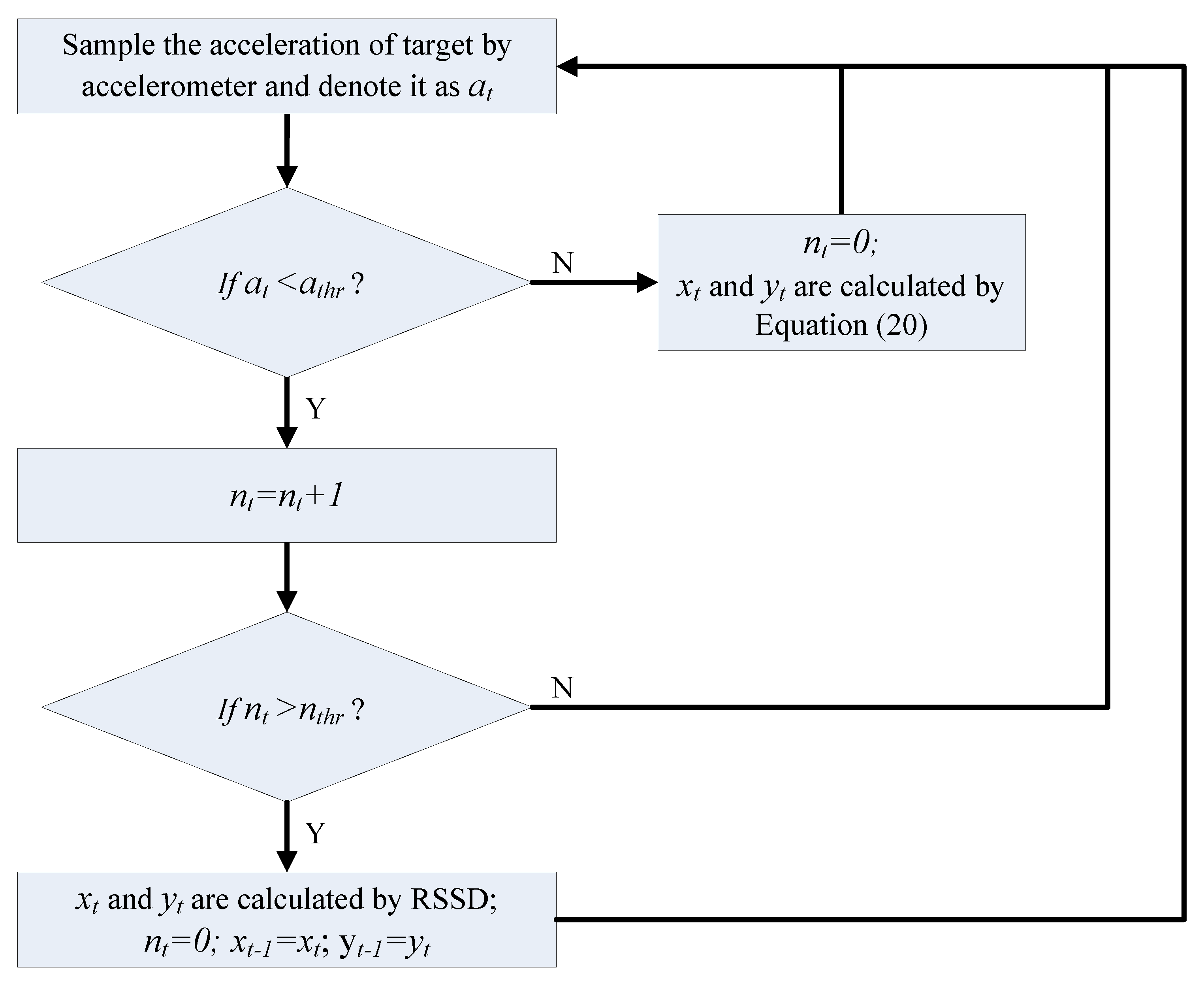
4.1. Movement Measuring
4.2. Unscented Kalman Filter
| Algorithm 1. Procedure for the unscented Kalman filter. |
| Step 1. Prediction |
| Step 1.1 Initialization |
| The model of the UKF for a nonlinear system is generally expressed as follows: |
| where f(x) represents the predicted function, x(k) denotes the state vector, u(k) is the input vector, and w(k) is the Gaussian process noise, with a covariance of Q(k). Moreover, h(x) is the measurement function, and v(k) represents the Gaussian measurement noise, with a covariance of R(k). Furthermore, w(k) and v(k) are all considered as zero-mean Gaussian noise. |
| At the first step, the state vector x(k) is initialized with a mean of x0, and the error covariance P0 is assigned as follows: |
| Step 1.2 Computing sigma points |
| According to the mean and error covariance Pk−1, a set containing 2n+1 weighted samples, which are called sigma points, are computed according to the following equation. The n in the formulas refers to the dimension of the state vector. |
| where λ is a scaling factor that can be acquired as follows: |
| where α is a small positive constant. t is the secondary scaling factor, which is set to 0 in our work. Thus, the mean weights Wm can be defined as follows: |
| Step 1.3 Propagating sigma points |
| The sigma points are propagated in the predicted function f(x). |
| Step 1.4 Calculate the prior state and error covariance |
| The prior state estimate can be calculated as follows: |
| To obtain the prior error covariance, the variance weights Wc should be acquired as follows: |
| where ρ represents a parameter in the state estimate, which is generally set to 2 to obtain the optimal estimation in Gaussian distributions. Moreover, the prior error covariance can be obtained as follows: |
| Step 2. Update |
| Step 2.1 Computing sigma points |
| After the predicting process, a new set of sigma points is acquired. The new sigma points are calculated by the prior state estimate as follows: |
| Step 2.2 Calculating the predicted output |
| Each sigma point in the measurement function h(x) is calculated to obtain the output, which is presented as below: |
| Furthermore, the predicted output can be acquired as follows: |
| Step 2.3 Computing the Kalman gain Kk |
| The predicted output covariance matrix and cross-covariance are necessary for obtaining the Kalman gain Kk. These values can be acquired according to the following equations. |
| Step 2.4 Calculate the posterior state and error covariance |
| According to the measurement information, the posterior state and error covariance estimate can be acquired by the following equations. |
| where Zk refers to the measurement sampled from the sensors at step k. Moreover, the posterior error covariance is essential for the calculation in the next step. |
4.3. Localization Procedure
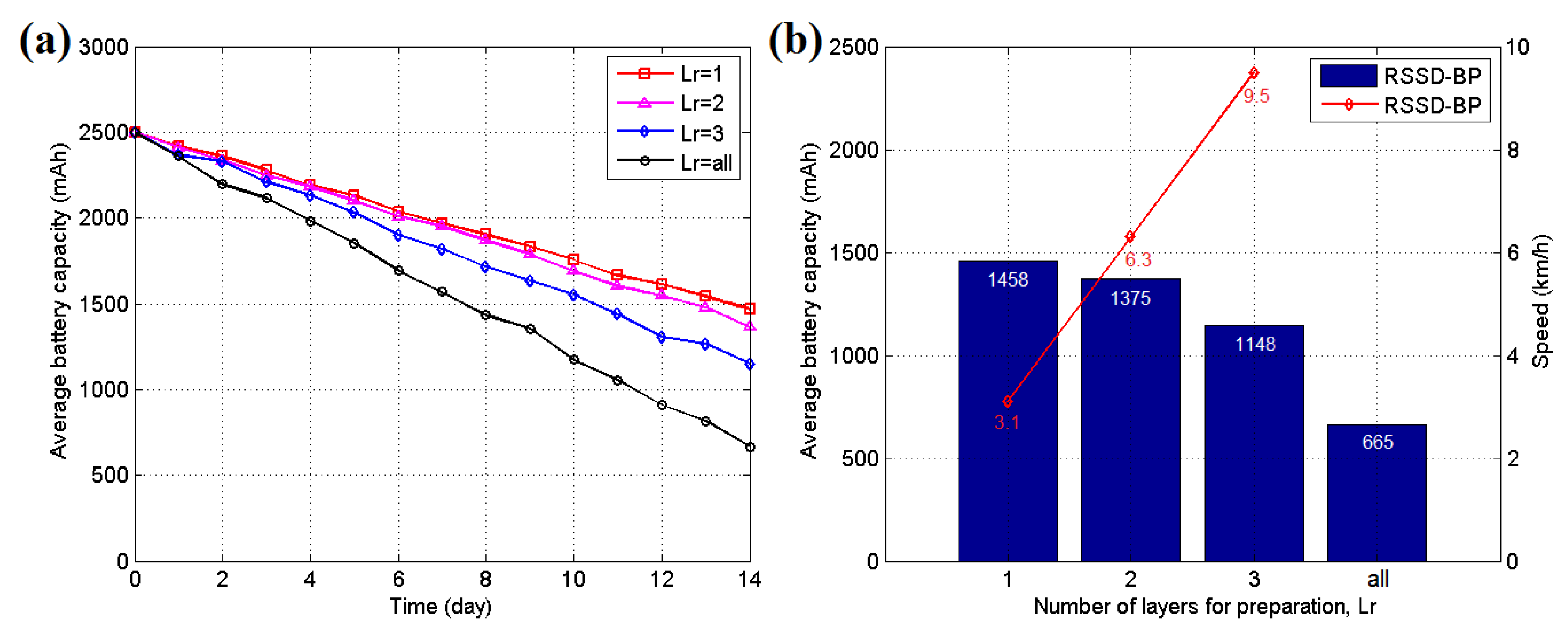
5. Anchor Selection and Energy Control
5.1. Structure for Energy Control
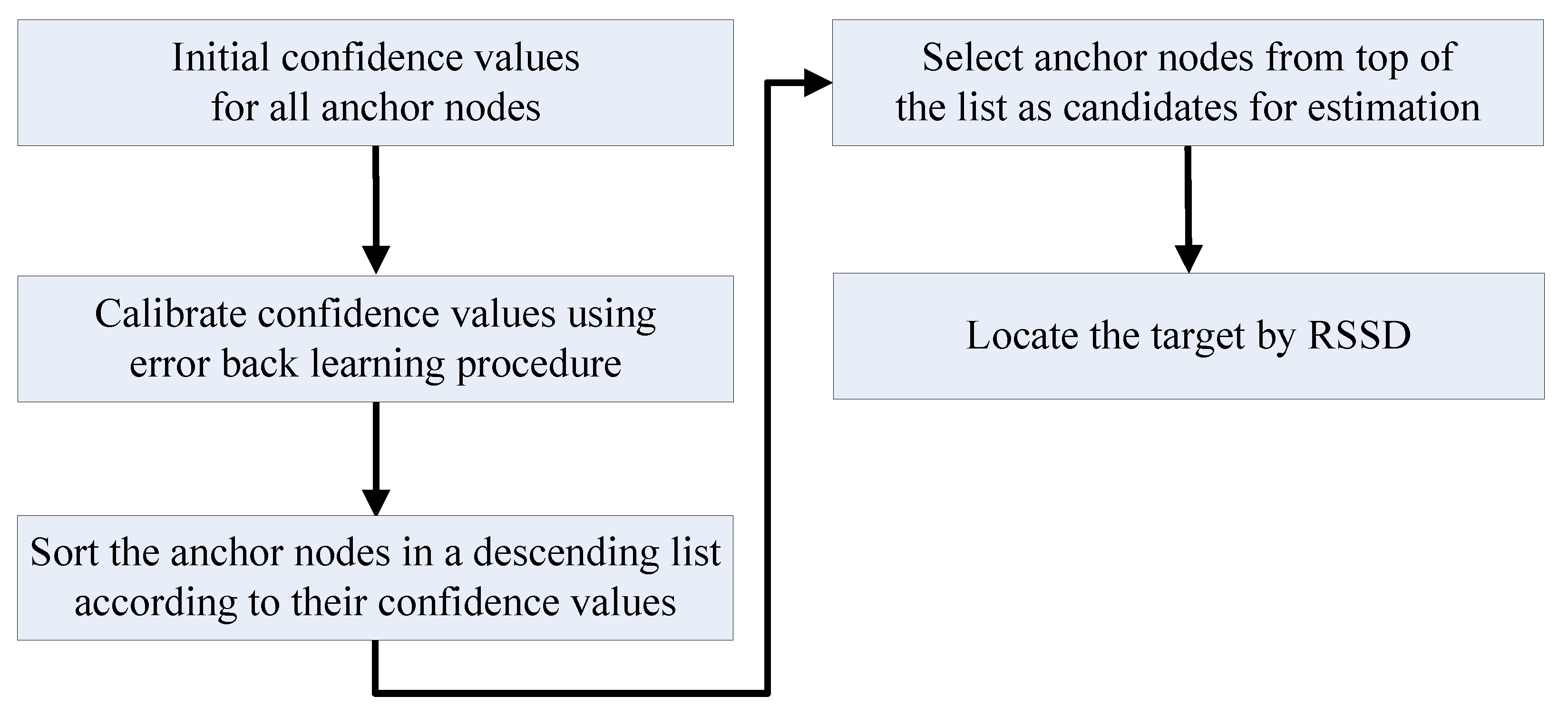
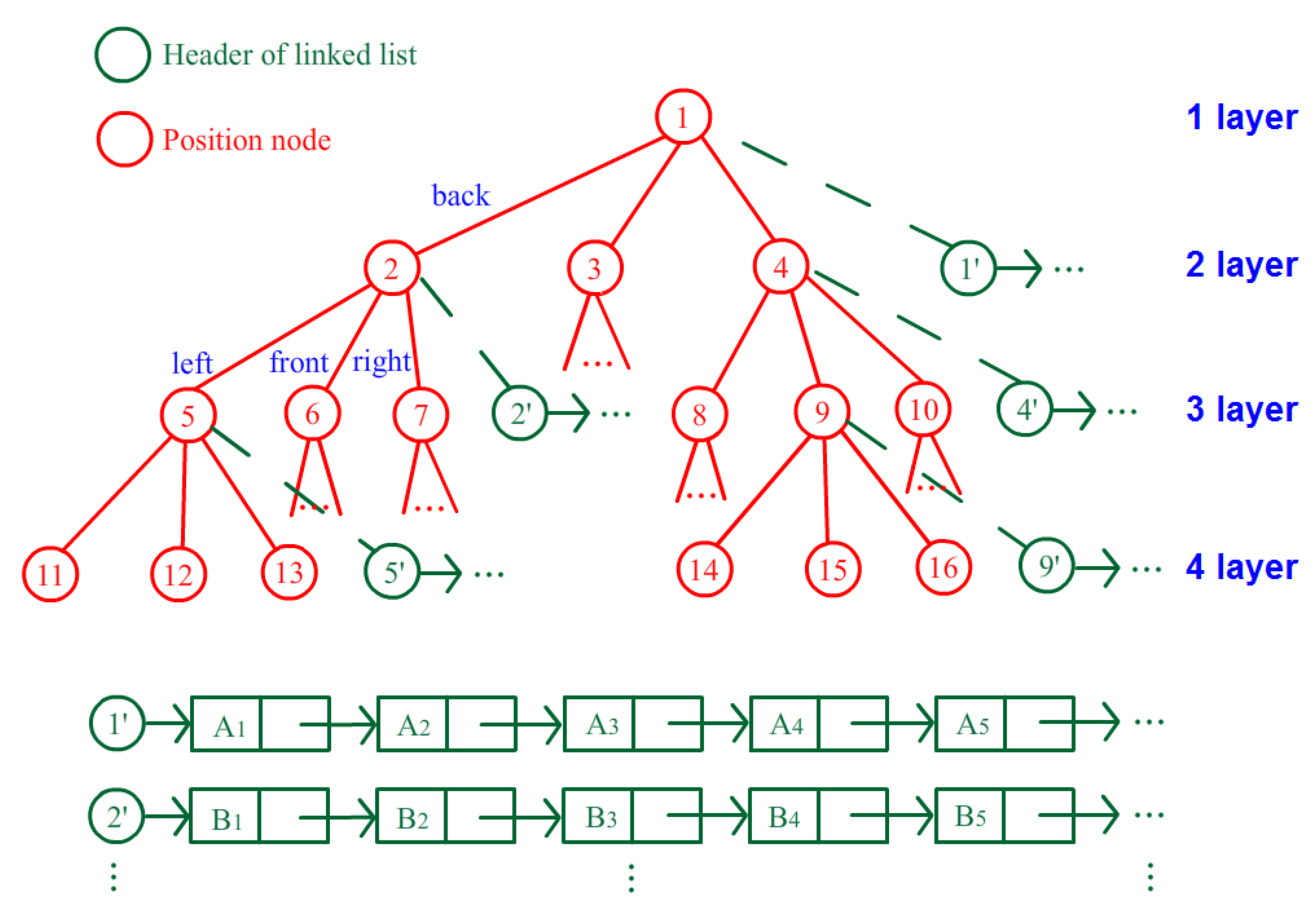
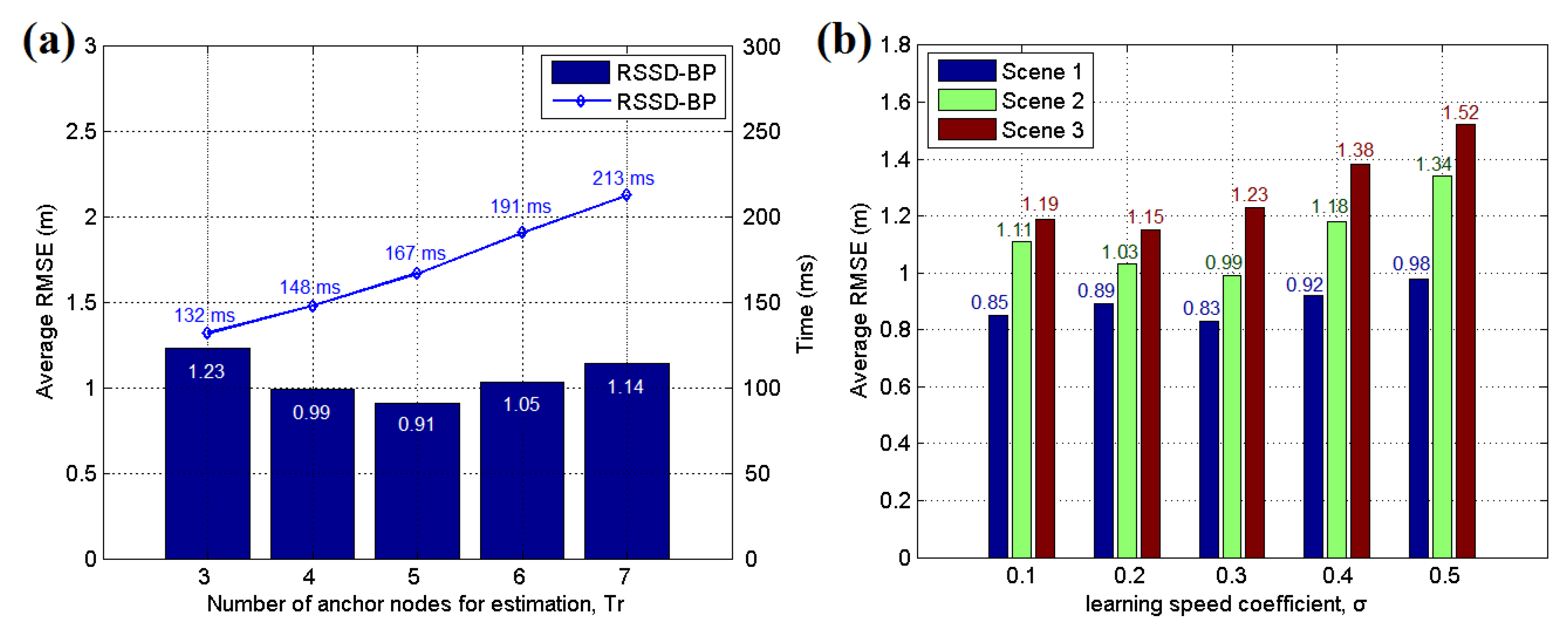
5.2. Anchor Node Selection
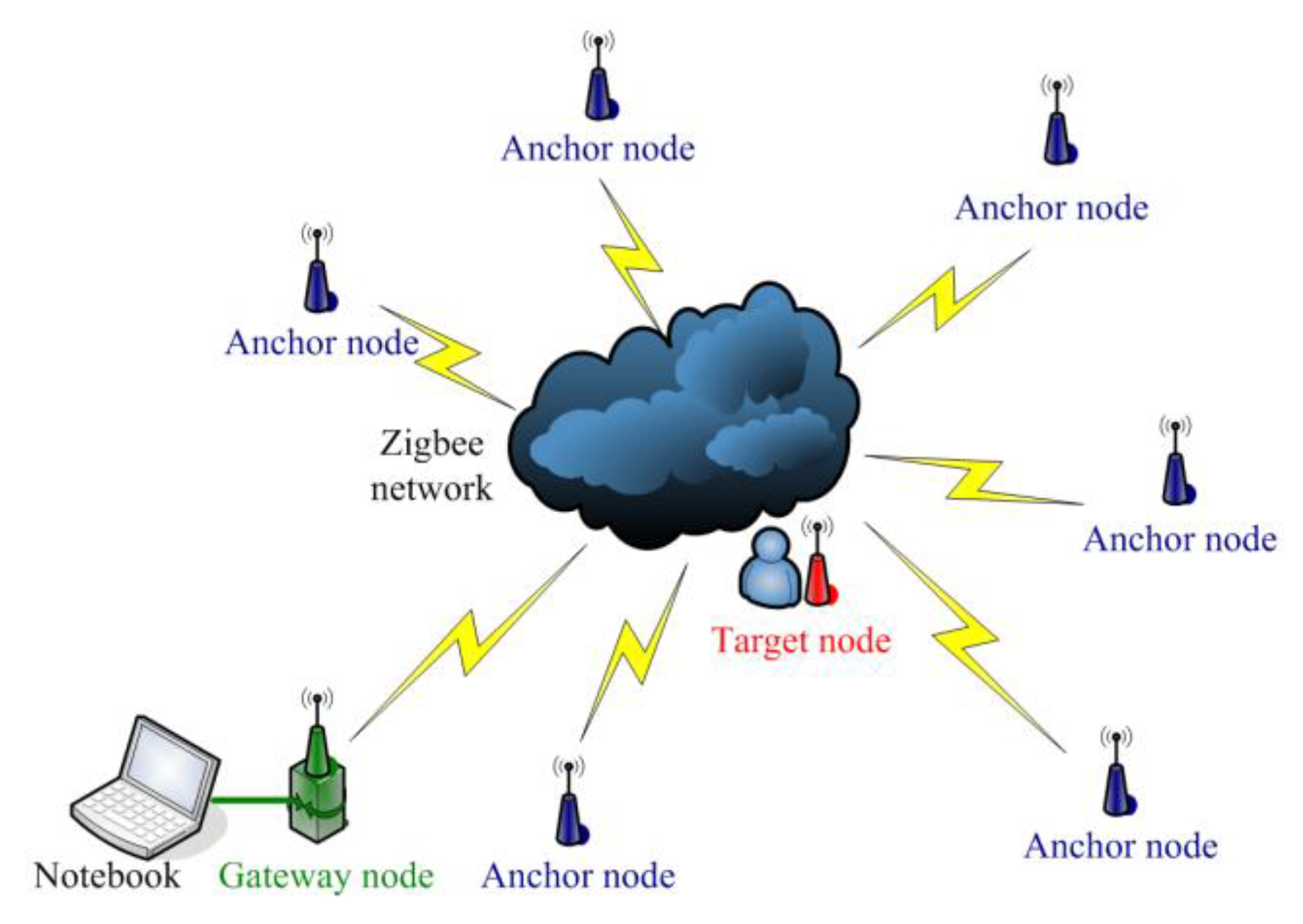
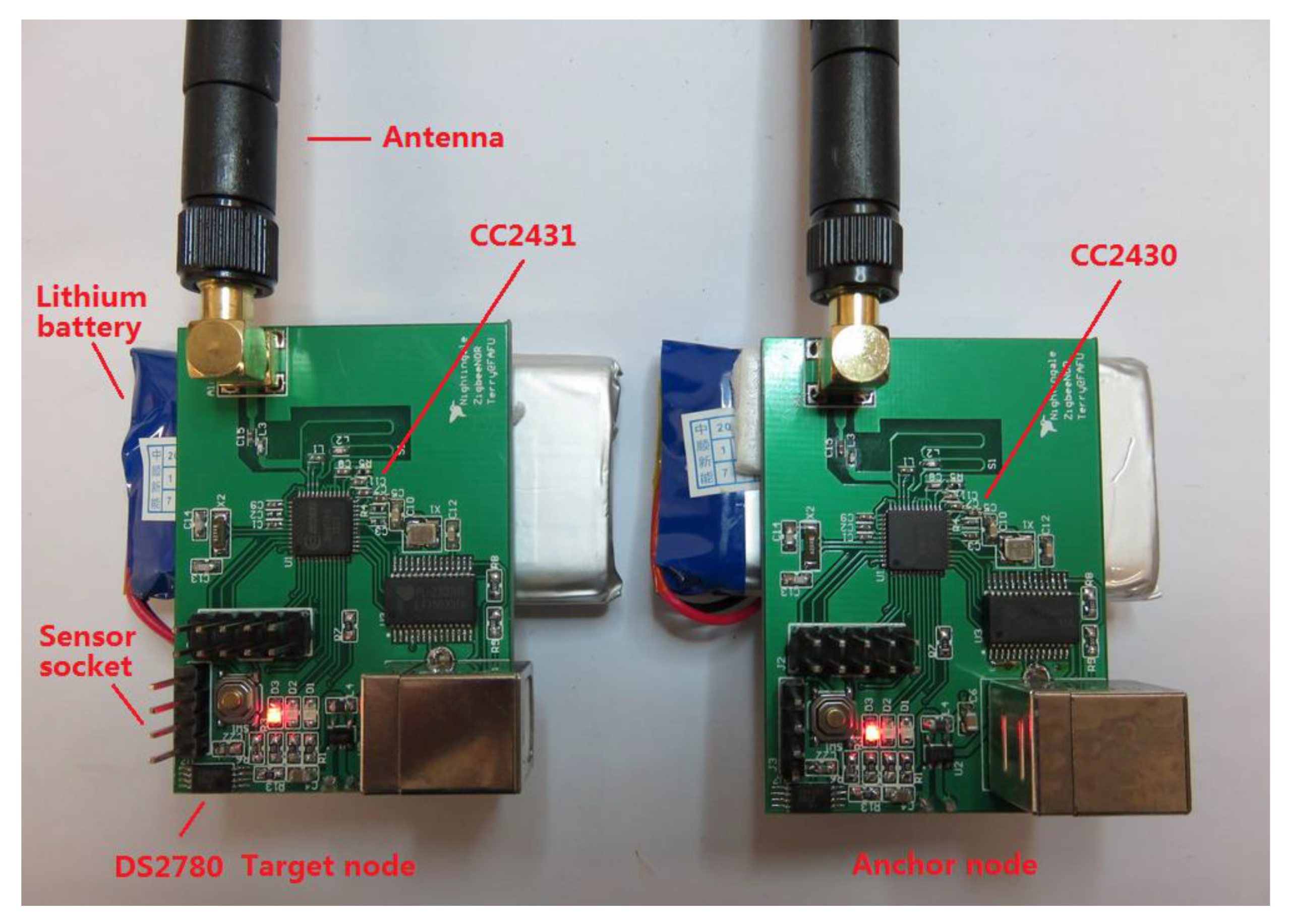
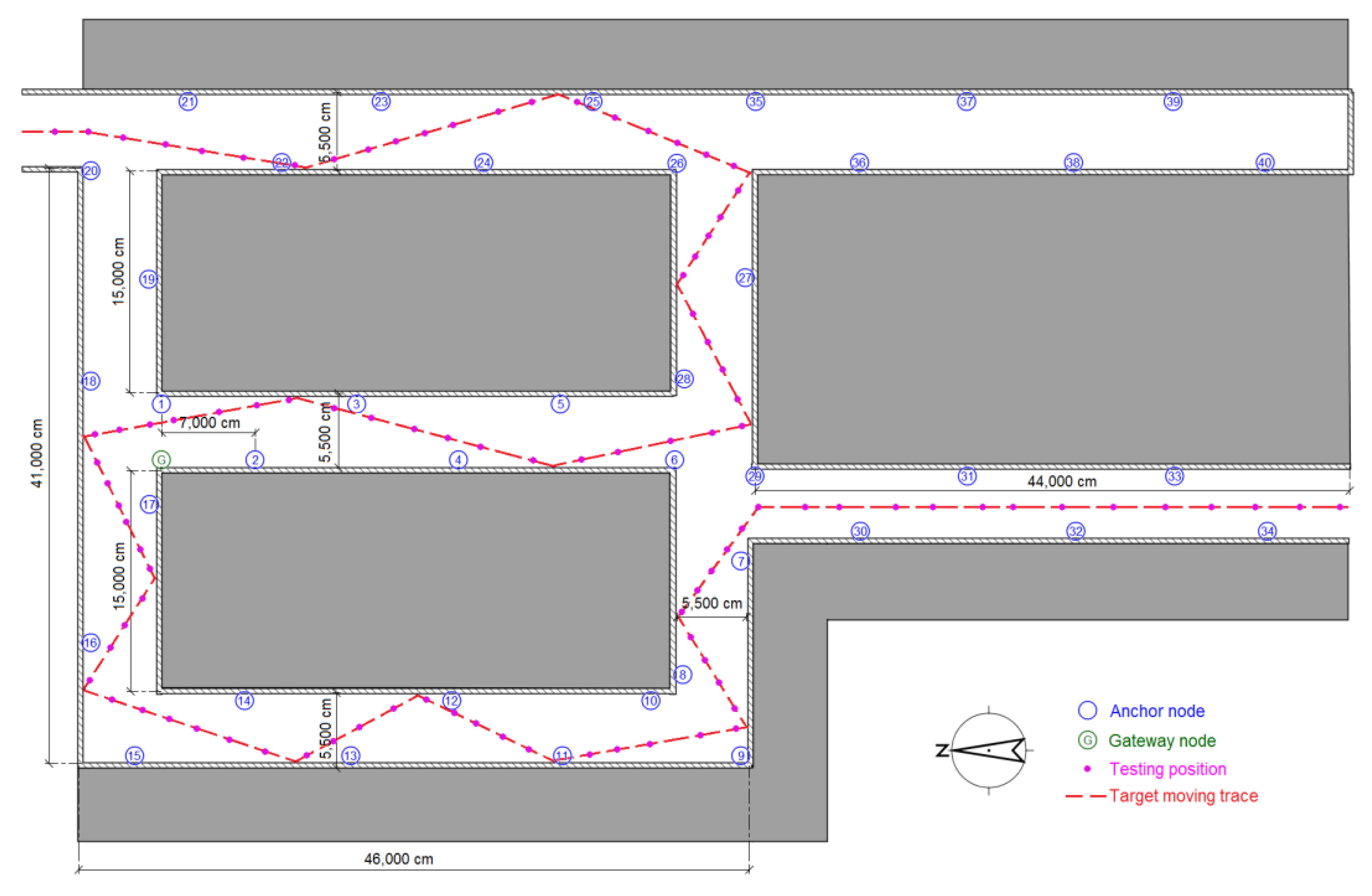
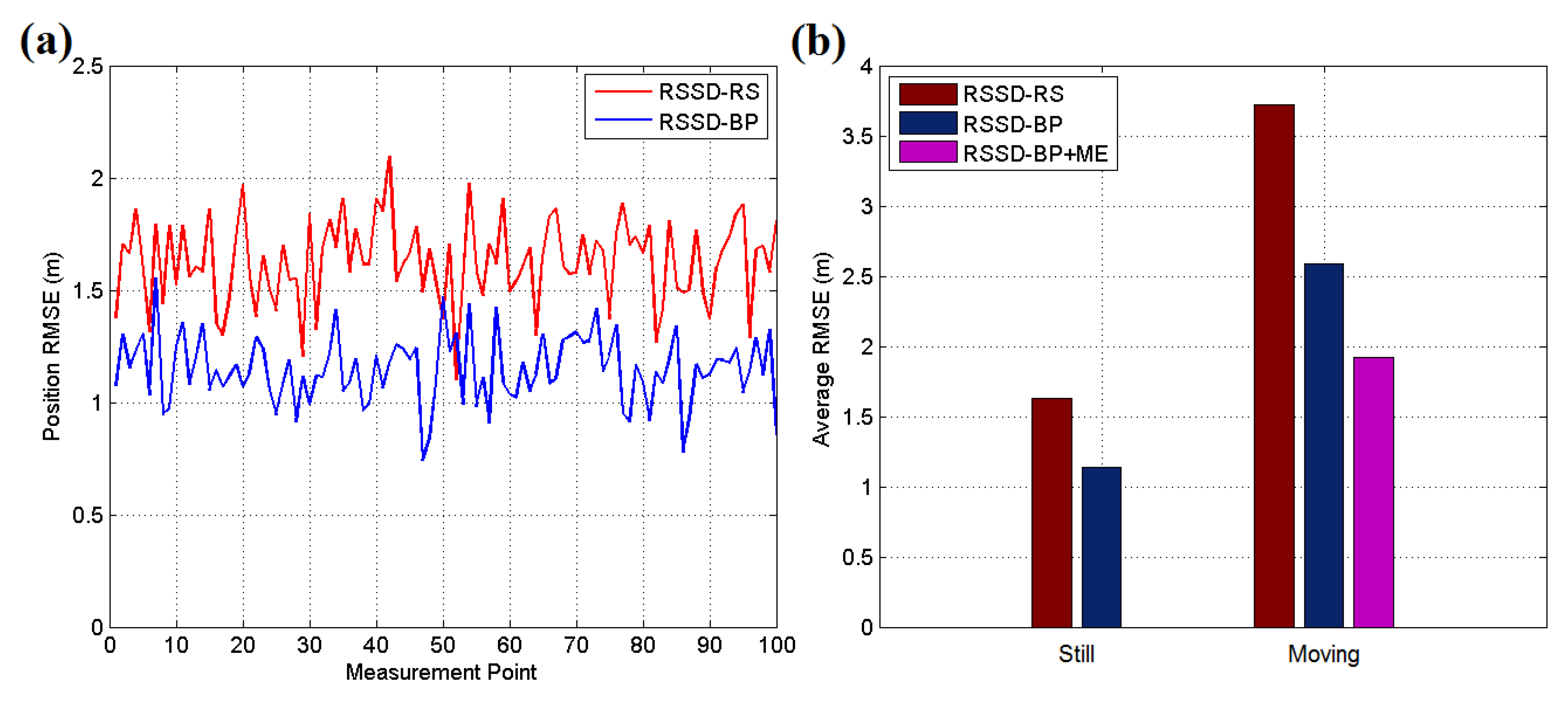
6. Implementation and Experiment
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mihaylova, L.; Angelova, D.; Bull, D.R.; Canagarajah, N. Localization of mobile nodes in wireless networks with correlated in time measurement noise. IEEE Trans. Mob. Comput. 2011, 10, 44–53. [Google Scholar] [CrossRef] [Green Version]
- Salman, N.; Alsindi, N.; Mihaylova, L.; Kemp, A.H. Super resolution WiFi indoor localization and tracking. In Proceedings of the IEEE Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 8–10 October 2014; pp. 1–5.
- Salman, N.; Mihaylova, L.; Kemp, A.H. Localization of multiple nodes based on correlated measurements and shrinkage estimation. In Proceedings of the IEEE Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, 8–10 October 2014; pp. 1–5.
- Huang, C.N.; Chan, C.T. A zigbee-based location-aware fall detection system for improving elderly telecare. Int. J. Environ. Res. Public Health 2014, 11, 4233–4248. [Google Scholar] [CrossRef] [PubMed]
- Hu, Q.; Ding, Y.; Wu, L.; Cao, C.; Zhang, S. An Enhanced Localization Method for Moving Targets in Coal Mines Based on Witness Nodes. Int. J. Distrib. Sens. Netw. 2015, 2015. [Google Scholar] [CrossRef]
- Kong, J.; Ding, M.; Li, X.; Li, C.; Li, S. An algorithm for mobile robot path planning using wireless sensor networks. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation, Beijing, China, 2–5 August 2015; pp. 2238–2242.
- Bostelmann, R.; Schneller, S.; Cornelius, J.F.; Steiger, H.J.; Fischer, I. A new possibility to assess the perioperative walking capacity using a global positioning system in neurosurgical spine patients: A feasibility study. Eur. Spine J. 2016, 25, 963–968. [Google Scholar] [CrossRef] [PubMed]
- Halder, S.J.; Giri, P.; Kim, W. Advanced Smoothing Approach of RSSI and LQI for Indoor Localization System. Int. J. Distrib. Sens. Netw. 2015, 2015. [Google Scholar] [CrossRef]
- Gai, S.; Oh, S.M.; Yi, B.J. ASC localization in noisy environment based on wireless sensor network. Intell. Serv. Robot. 2015, 8, 201–213. [Google Scholar] [CrossRef]
- Yuan, X.; Yu, S.; Zhang, S.; Wang, G.; Liu, S. Quaternion-based unscented Kalman filter for accurate indoor heading estimation using wearable multi-sensor system. Sensors 2015, 15, 10872–10890. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Wang, J.; Liu, C. A Bluetooth/PDR Integration Algorithm for an Indoor Positioning System. Sensors 2015, 15, 24862–24885. [Google Scholar] [CrossRef] [PubMed]
- Maddumabandara, A.; Leung, H.; Liu, M. Experimental Evaluation of Indoor Localization Using Wireless Sensor Networks. IEEE Sens. J. 2015, 15, 5228–5237. [Google Scholar] [CrossRef]
- Lohrasbipeydeh, H.; Gulliver, T.A.; Amindavar, H. Blind Received Signal Strength Difference Based Source Localization with System Parameter Errors. IEEE Trans. Signal Process. 2014, 62, 4516–4531. [Google Scholar] [CrossRef]
- Yin, Z.; Cui, K.; Wu, Z.; Yin, L. Entropy-Based TOA Estimation and SVM-Based Ranging Error Mitigation in UWB Ranging Systems. Sensors 2015, 15, 11701–11724. [Google Scholar] [CrossRef] [PubMed]
- Huang, B.; Xie, L.; Yang, Z. TDOA-based source localization with distance-dependent noises. IEEE Trans. Wirel. Commun. 2015, 14, 468–480. [Google Scholar] [CrossRef]
- Xu, J.; Ma, M.; Law, C.L. Cooperative angle-of-arrival position localization. Measurement 2015, 59, 302–313. [Google Scholar] [CrossRef]
- Yi, J.; Mirza, D.; Kastner, R.; Schurgers, C.; Roberts, P.; Jaffe, J. ToA-TS: Time of arrival based joint time synchronization and tracking for mobile underwater systems. Ad Hoc Netw. 2015, 34, 211–223. [Google Scholar] [CrossRef]
- Kim, S.C.; Jeong, Y.S.; Park, S.O. RFID-based indoor location tracking to ensure the safety of the elderly in smart home environments. Pers. Ubiquitous Comput. 2013, 17, 1699–1707. [Google Scholar] [CrossRef]
- Deshpande, N.; Grant, E.; Henderson, T.C.; Draelos, M.T. Autonomous navigation using received signal strength and bearing-only pseudogradient interpolation. Robot. Auton. Syst. 2016, 75, 129–144. [Google Scholar] [CrossRef]
- Lohrasbipeydeh, H.; Gulliver, T.A.; Amindavar, H. Unknown Transmit Power RSSD Based Source Localization with Sensor Position Uncertainty. IEEE Trans. Commun. 2015, 63, 1784–1797. [Google Scholar] [CrossRef]
- Simonetto, A.; Leus, G. Distributed maximum likelihood sensor network localization. IEEE Trans. Signal Process. 2014, 62, 1424–1437. [Google Scholar] [CrossRef]
- Li, B.; He, Y.; Guo, F.; Zuo, L. A novel localization algorithm based on isomap and partial least squares for wireless sensor networks. IEEE Trans. Instrum. Meas. 2013, 62, 304–314. [Google Scholar] [CrossRef]
- Nikolidakis, S.A.; Kandris, D.; Vergados, D.D.; Douligeris, C. Energy efficient automated control of irrigation in agriculture by using wireless sensor networks. Comput. Electron. Agric. 2015, 113, 154–163. [Google Scholar] [CrossRef]
- Zou, T.; Lin, S.; Feng, Q.; Chen, Y. Energy-Efficient Control with Harvesting Predictions for Solar-Powered Wireless Sensor Networks. Sensors 2016, 16, 53. [Google Scholar] [CrossRef] [PubMed]
- Torkestani, J.A. An Energy-Efficient Topology Control Mechanism for Wireless Sensor Networks Based on Transmit Power Adjustment. Wirel. Pers. Commun. 2015, 82, 2537–2556. [Google Scholar]
- Rao, V.S.; Prasad, R.V.; Niemegeers, I.G.M.M. Optimal task scheduling policy in energy harvesting wireless sensor networks. In Proceedings of the 2015 IEEE Wireless Communications and Networking Conference, New Orleans, LA, USA, 9–12 March 2015; pp. 1030–1035.
- Lin, K.; Xu, T.; Hassan, M.M.; Alamri, A.; Alelaiwi, A. An Energy-efficiency Node Scheduling Game Based on Task Prediction in WSNs. Mob. Netw. Appl. 2015, 20, 583–592. [Google Scholar] [CrossRef]
- Jameii S, M.; Faez, K.; Dehghan, M. Multiobjective optimization for topology and coverage control in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2015, 2015. [Google Scholar] [CrossRef]
- Jameii, S.M.; Faez, K.; Dehghan, M. AMOF: Adaptive multi-objective optimization framework for coverage and topology control in heterogeneous wireless sensor networks. Telecommun. Syst. 2015, 61, 1–16. [Google Scholar] [CrossRef]
- Liu, J.; Li, J.; Niu, X.; Cui, X.; Sun, Y. GreenOCR: an energy-efficient optimal clustering routing protocol. Comput. J. 2015, 58, 1344–1359. [Google Scholar] [CrossRef]
- Rodrigues, F.; Brayner, A.; Maia, J.E.B. Using fractal clustering to explore behavioral correlation: A new approach to reduce energy consumption in WSN. In Proceedings of the 30th Annual ACM Symposium on Applied Computing, New York, NY, USA, 13 April 2015.
- Wang, S.; Inkol, R. A near-optimal least squares solution to received signal strength difference based geolocation. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing, Prague, Czech Republic, 22–27 May 2011; pp. 2600–2603.
- Jiang, K.; Cao, E.; Wei, L. NOx sensor ammonia cross-sensitivity estimation with adaptive unscented Kalman filter for Diesel-engine selective catalytic reduction systems. Fuel 2016, 165, 185–192. [Google Scholar] [CrossRef]
- Nieto, M.; Cortés, A.; Otaegui, O.; Arróspide, J.; Salgado, L. Real-time lane tracking using Rao-Blackwellized particle filter. J. Real-Time Image Proc. 2016, 11, 179–191. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Average RMSE (m) | ||||
|---|---|---|---|---|---|
| Tr = 3 | Tr = 4 | Tr = 5 | Tr = 6 | Tr = 7 | |
| Scenario 1 | 1.10 | 0.83 | 0.87 | 0.92 | 1.01 |
| Scenario 2 | 1.23 | 0.99 | 0.91 | 1.05 | 1.14 |
| Scenario 3 | 1.44 | 1.15 | 1.06 | 1.23 | 1.33 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, T.; Lin, S.; Li, S. Blind RSSD-Based Indoor Localization with Confidence Calibration and Energy Control. Sensors 2016, 16, 788. https://doi.org/10.3390/s16060788
Zou T, Lin S, Li S. Blind RSSD-Based Indoor Localization with Confidence Calibration and Energy Control. Sensors. 2016; 16(6):788. https://doi.org/10.3390/s16060788
Chicago/Turabian StyleZou, Tengyue, Shouying Lin, and Shuyuan Li. 2016. "Blind RSSD-Based Indoor Localization with Confidence Calibration and Energy Control" Sensors 16, no. 6: 788. https://doi.org/10.3390/s16060788
APA StyleZou, T., Lin, S., & Li, S. (2016). Blind RSSD-Based Indoor Localization with Confidence Calibration and Energy Control. Sensors, 16(6), 788. https://doi.org/10.3390/s16060788