
An Improved Interacting Multiple Model Filtering Algorithm Based on the Cubature Kalman Filter for Maneuvering Target Tracking

Abstract
:
1. Introduction
2. Five Degree Cubature Kalman Filter
2.1. Time Update
2.2. Measurement Update
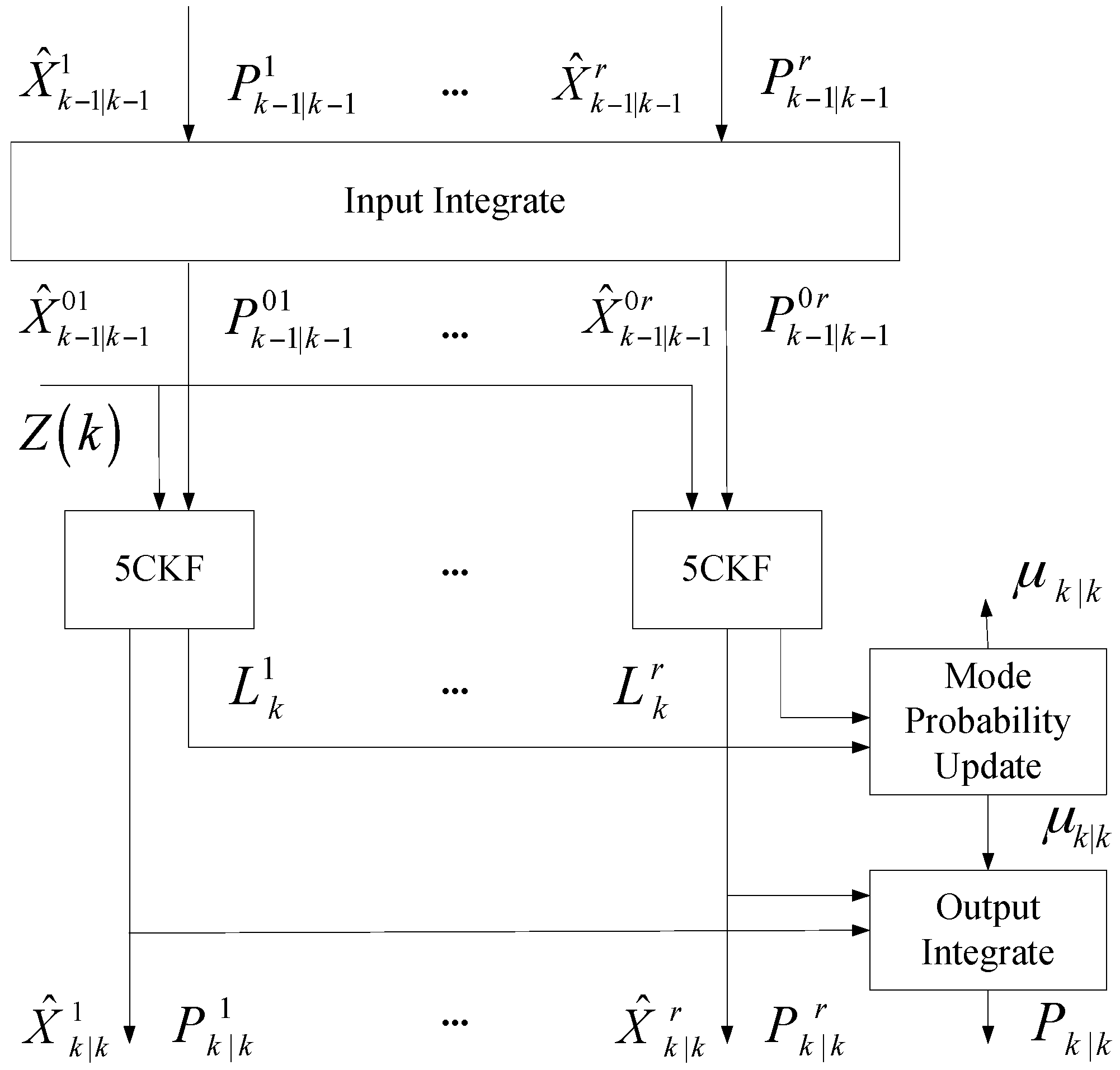
3. IMM High Degree Cubature Kalman Filter
3.1. Input Integration
3.2. Five Degree Cubature Kalman Filtering
3.3. Model Probability Update
3.4. Output Integration
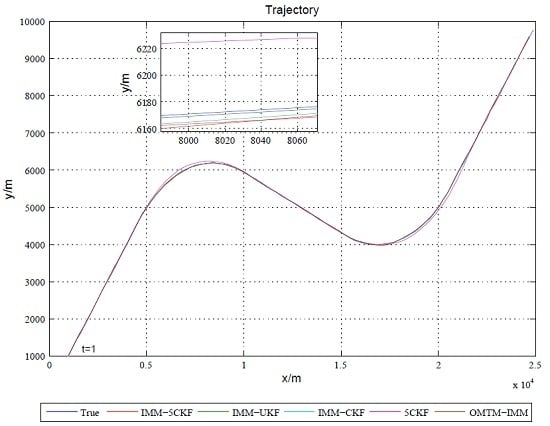
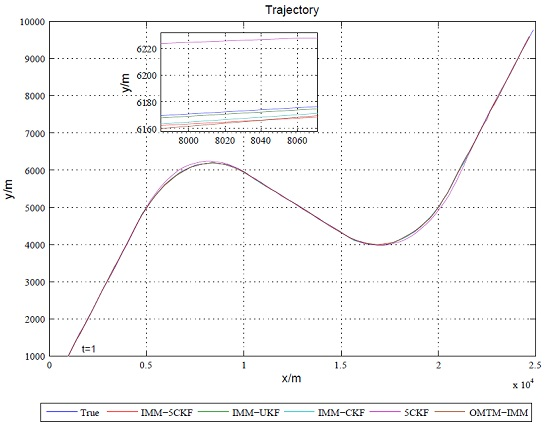
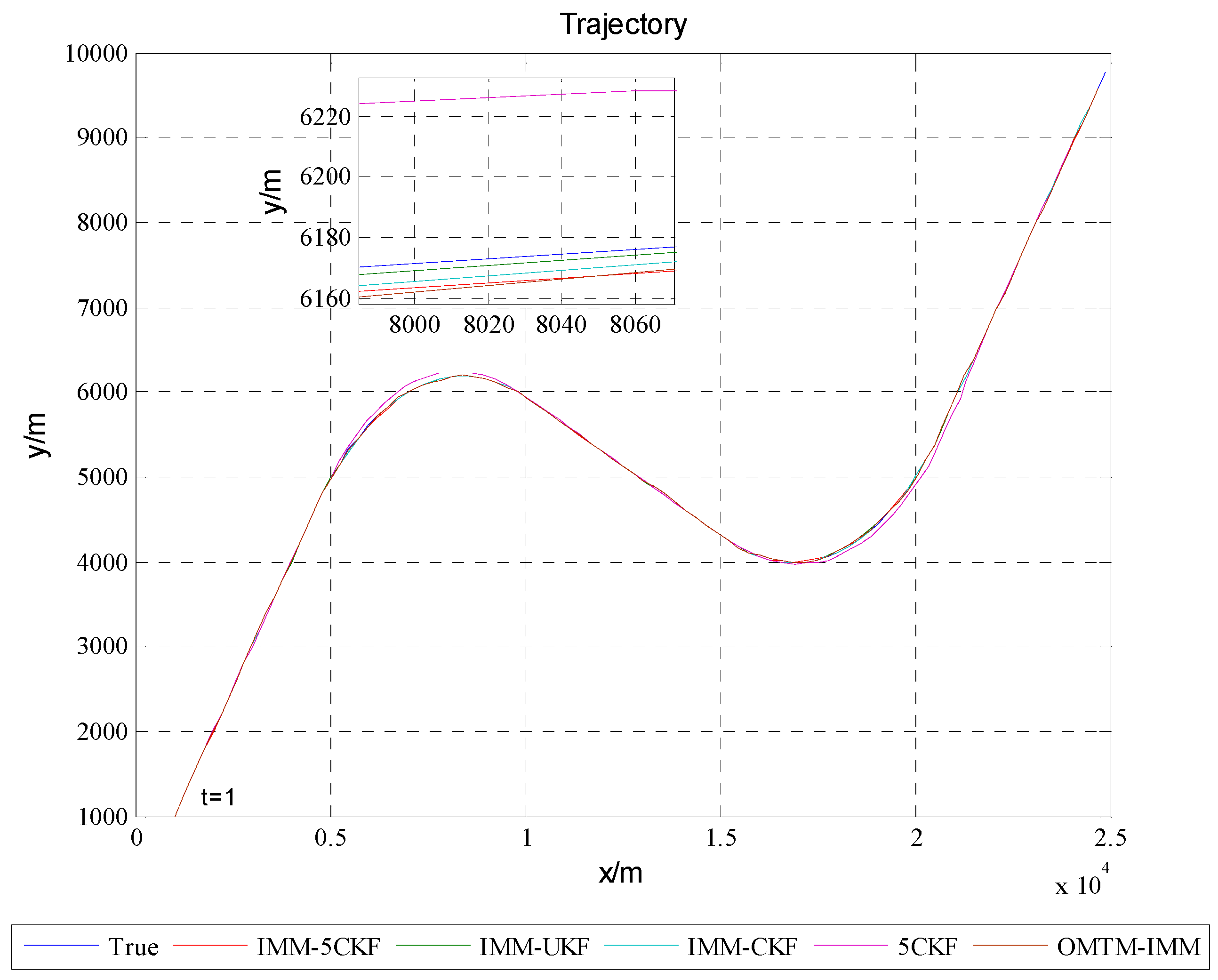
4. Results and Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Read, J.; Achutegui, K.; Miguez, J. A distributed particle filter for nonlinear tracking in wireless sensor networks. Signal Process. 2014, 98, 121–134. [Google Scholar] [CrossRef]
- Li, W.; Jia, Y.; Du, J.; Zhang, J. PHD filter for multi-target tracking with glint noise. Signal Process. 2014, 94, 48–56. [Google Scholar] [CrossRef]
- Meyer, F.; Hlinka, O.; Hlawatsch, F. Sigma point belief propagation. IEEE Signal Process. Lett. 2014, 21, 145–149. [Google Scholar] [CrossRef]
- Zhang, T.; Wu, R. Affinity propagation clustering of measurements for multiple extended target tracking. Sensors 2015, 15, 22646–22659. [Google Scholar] [CrossRef] [PubMed]
- Morelande, M.R.; Garcia-Fernandez, A.F. Analysis of Kalman filter approximations for nonlinear measurements. IEEE Trans. Signal Process. 2013, 66, 5477–5484. [Google Scholar] [CrossRef]
- Bugallo, M.F.; Xu, S.; Djurić, P.M. Performance comparison of EKF and particle filtering methods for maneuvering targets. Digit. Signal Process. 2007, 17, 774–786. [Google Scholar] [CrossRef]
- Jwo, D.J.; Wang, S.H. Adaptive fuzzy strong tracking extended Kalman filtering for GPS navigation. IEEE Sens. J. 2007, 7, 778–789. [Google Scholar] [CrossRef]
- Frogerais, P.; Bellanger, J.J.; Senhadji, L. Various ways to compute the continuous–discrete extended Kalman filter. IEEE Trans. Autom. Control 2012, 57, 1000–1004. [Google Scholar] [CrossRef]
- Julier, S.; Uhlmann, J.; Durrant-Whyte, H.F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control 2000, 45, 477–482. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S.; Hurd, T.R. Cubature Kalman filtering for continuous–discrete systems: Theory and simulations. IEEE Trans. Signal Process. 2010, 58, 4977–4993. [Google Scholar] [CrossRef]
- Sun, F.; Tang, L.J. Estimation precision comparison of Cubature Kalman filter and Unscented Kalman filter. Control Decis. 2013, 28, 303–308. [Google Scholar]
- Blom, H.A.; Bar-Shalom, Y. The interacting multiple model algorithm for systems with markovian switching coefficients. IEEE Trans. Autom. Control 1998, 33, 780–783. [Google Scholar] [CrossRef]
- Cui, N.; Hong, L.; Layne, J.R. A comparison of nonlinear filtering approaches with an application to ground target tracking. Signal Process. 2005, 85, 1469–1492. [Google Scholar] [CrossRef]
- Gao, L.; Xing, J.; Ma, Z.; Sha, J.; Meng, X. Improved IMM algorithm for nonlinear maneuvering target tracking. Procedia Eng. 2012, 2, 4117–4123. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, C.; Hu, H.; Liu, S.; Chu, J. An Algorithm of the Adaptive Grid and Fuzzy Interacting Multiple Model. J. Mar. Sci. Appl. 2014, 13, 340–345. [Google Scholar] [CrossRef]
- Li, W.; Jia, Y. Location of mobile station with maneuvers using an IMM-based cubature Kalman filter. IEEE Trans. Ind. Electron. 2012, 59, 4338–4348. [Google Scholar] [CrossRef]
- Wan, M.; Li, P.; Li, T. Tracking maneuvering target with angle-only measurements using IMM algorithm based on CKF. In Proceedings of the 2010 International Conference on Communications and Mobile Computing, Shenzhen, China, 12–14 April 2010.
- Lee, S.J.; Motai, Y.; Choi, H. Tracking human motion with multichannel interacting multiple model. IEEE Trans. Ind. Inform. 2013, 9, 1751–1763. [Google Scholar]
- Himberg, H.; Motai, Y.; Bradley, A.P. A multiple model approach to tracking head orientation with delta quaternions. IEEE Trans. Cybern. 2013, 43, 90–101. [Google Scholar] [CrossRef] [PubMed]
- Barrios, C.; Motai, Y.; Huston, D. Intelligent forecasting using dead reckoning with dynamic errors. IEEE Trans. Ind. Inform. 2015. [Google Scholar] [CrossRef]
- Zhou, W.; Cai, J.; Sun, L.; Shen, C. An improved interacting multiple model algorithm used in aircraft tracking. Math. Probl. Eng. 2014, 2014, 813654. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M.; Cheng, Y. High-degree cubature Kalman filter. Automatica 2013, 49, 510–518. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
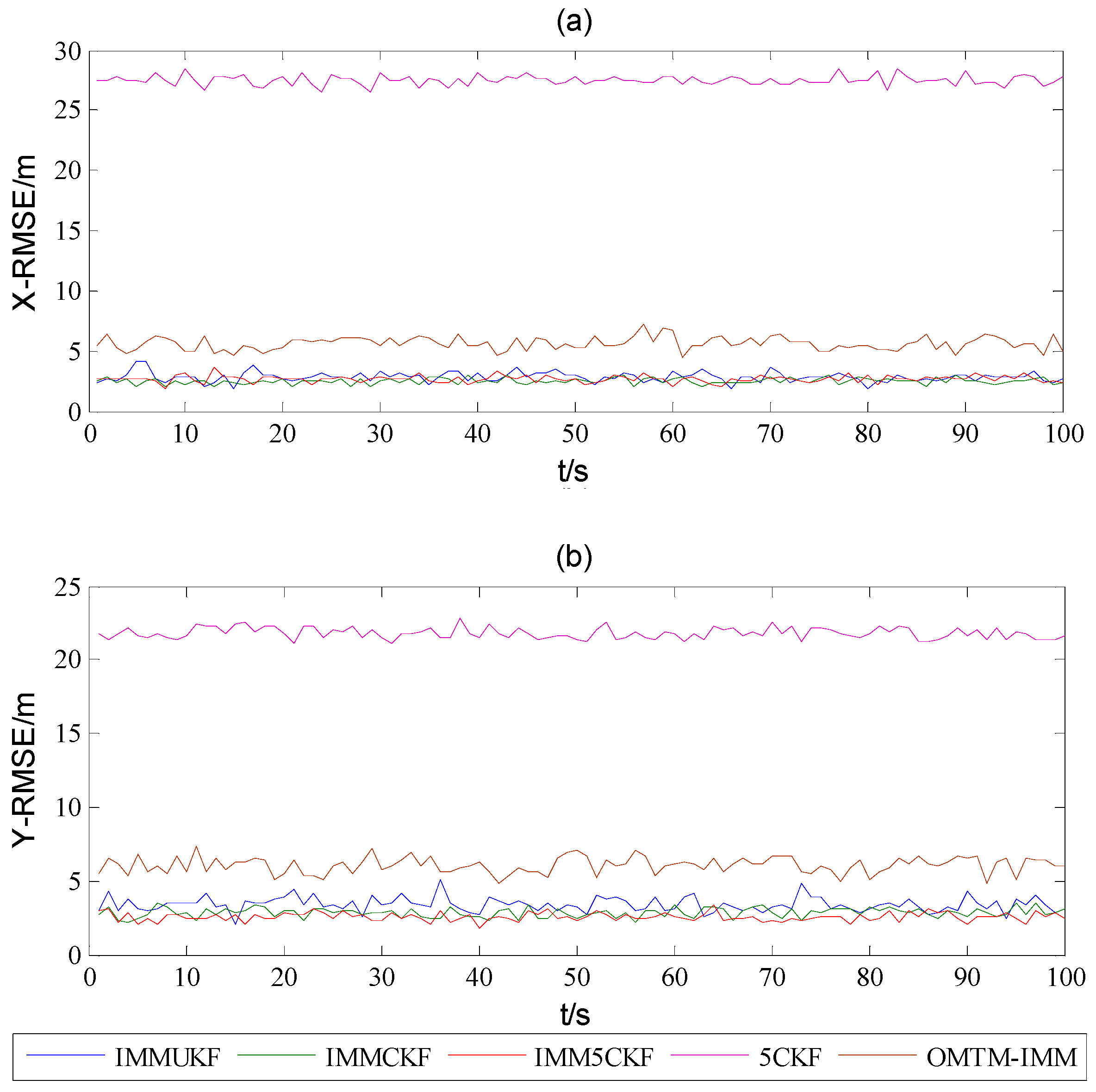
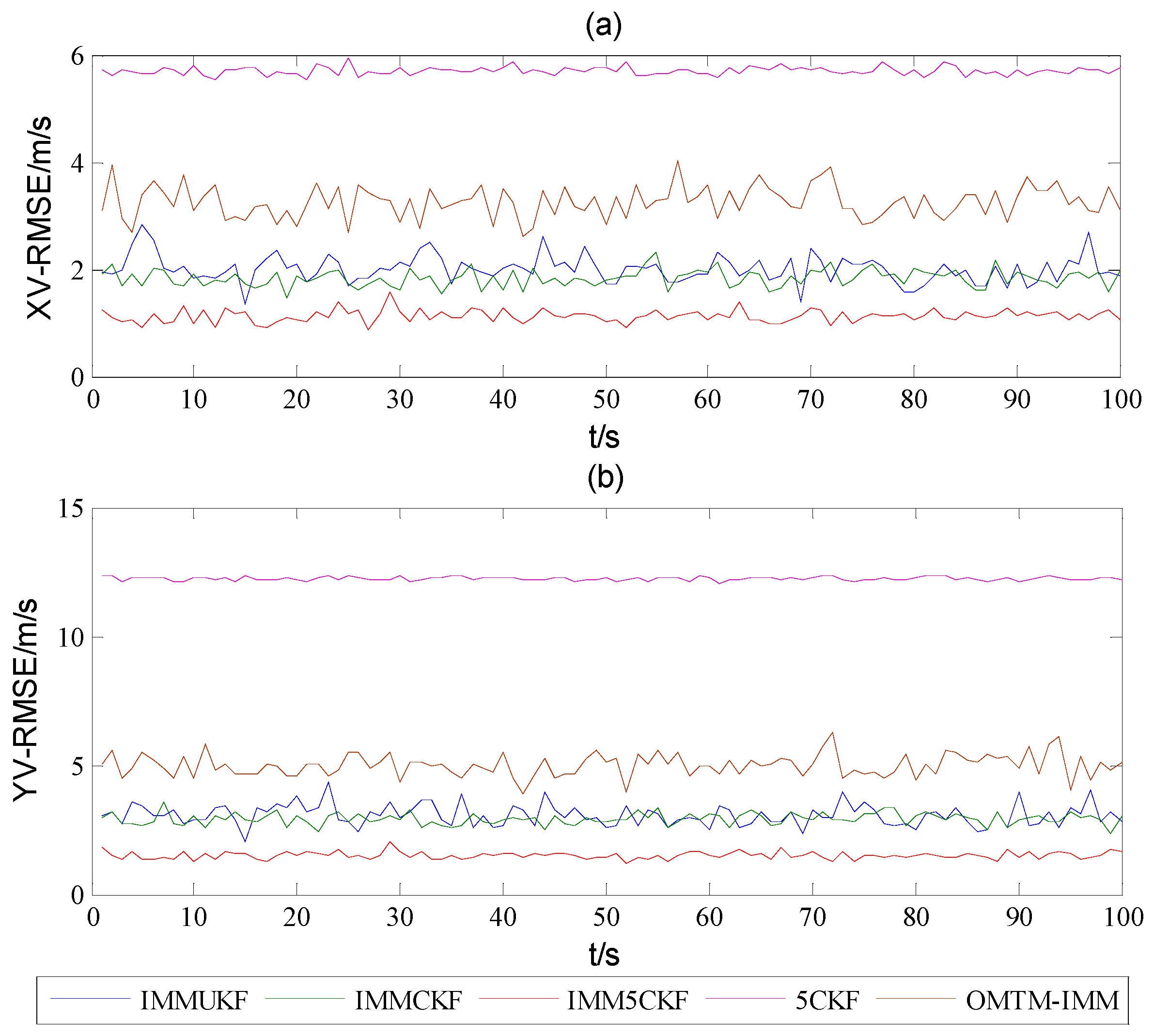
| RMSE | IMM5CKF | IMMCKF | IMMUKF | 5CKF | OMTM-IMM |
|---|---|---|---|---|---|
| RMSE_X (m) | 2.6675 | 2.4847 | 2.5392 | 27.4975 | 5.6211 |
| RMSE_X_V (m/s) | 1.1245 | 1.8306 | 1.8930 | 5.7001 | 3.2510 |
| RMSE_Y (m) | 2.5255 | 2.8534 | 3.0362 | 21.7947 | 6.0674 |
| RMSE_Y_V (m/s) | 1.4972 | 2.9201 | 2.8488 | 12.2331 | 4.9938 |
| Time (s) | 14.9726 | 7.2549 | 7.3785 | 5.3101 | 6.0314 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, W.; Wang, W.; Yuan, G. An Improved Interacting Multiple Model Filtering Algorithm Based on the Cubature Kalman Filter for Maneuvering Target Tracking. Sensors 2016, 16, 805. https://doi.org/10.3390/s16060805
Zhu W, Wang W, Yuan G. An Improved Interacting Multiple Model Filtering Algorithm Based on the Cubature Kalman Filter for Maneuvering Target Tracking. Sensors. 2016; 16(6):805. https://doi.org/10.3390/s16060805
Chicago/Turabian StyleZhu, Wei, Wei Wang, and Gannan Yuan. 2016. "An Improved Interacting Multiple Model Filtering Algorithm Based on the Cubature Kalman Filter for Maneuvering Target Tracking" Sensors 16, no. 6: 805. https://doi.org/10.3390/s16060805
APA StyleZhu, W., Wang, W., & Yuan, G. (2016). An Improved Interacting Multiple Model Filtering Algorithm Based on the Cubature Kalman Filter for Maneuvering Target Tracking. Sensors, 16(6), 805. https://doi.org/10.3390/s16060805