
Accurate Vehicle Location System Using RFID, an Internet of Things Approach

Abstract
:1. Introduction
2. Related Works
3. System Overview
4. System Design
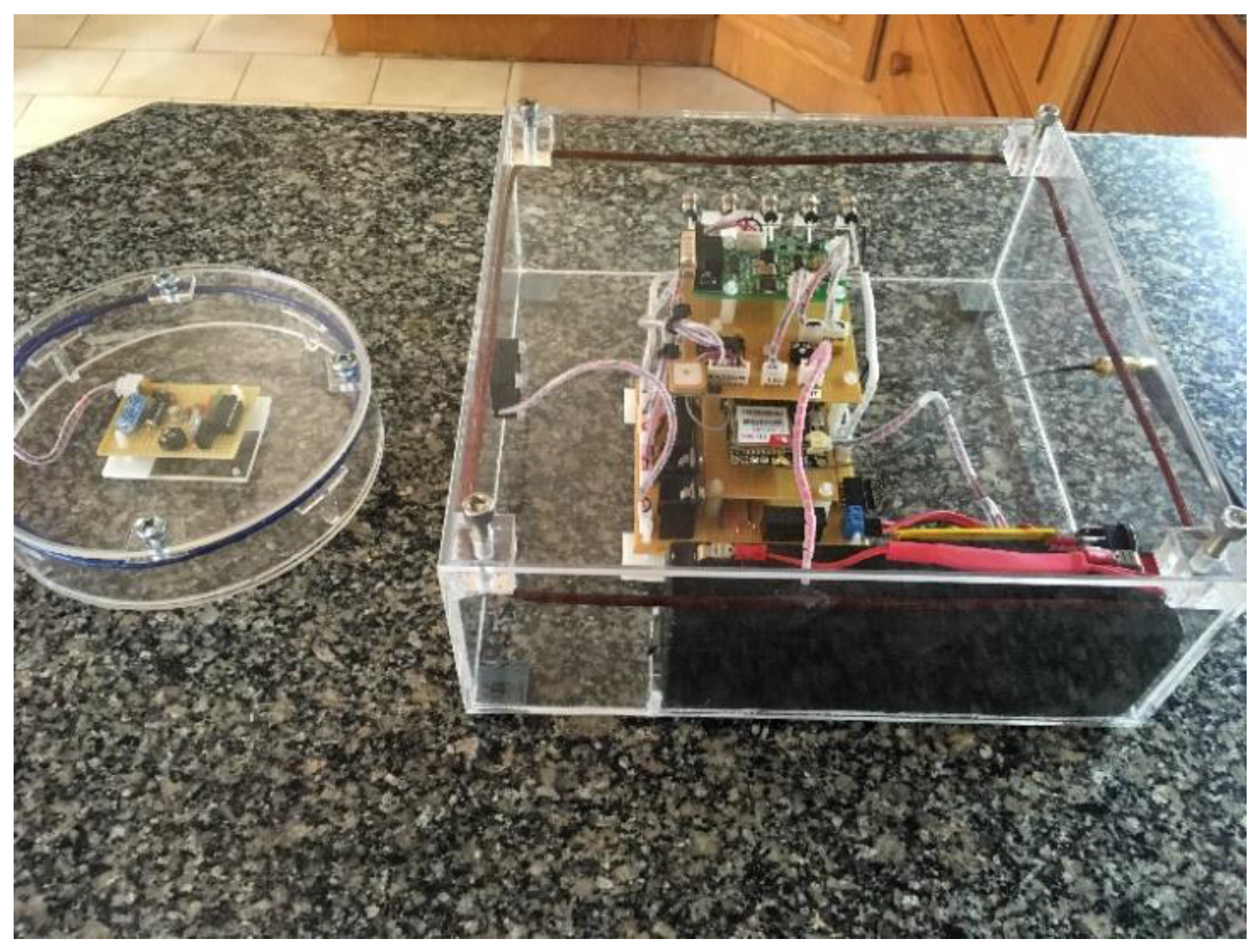
4.1. Main System Design
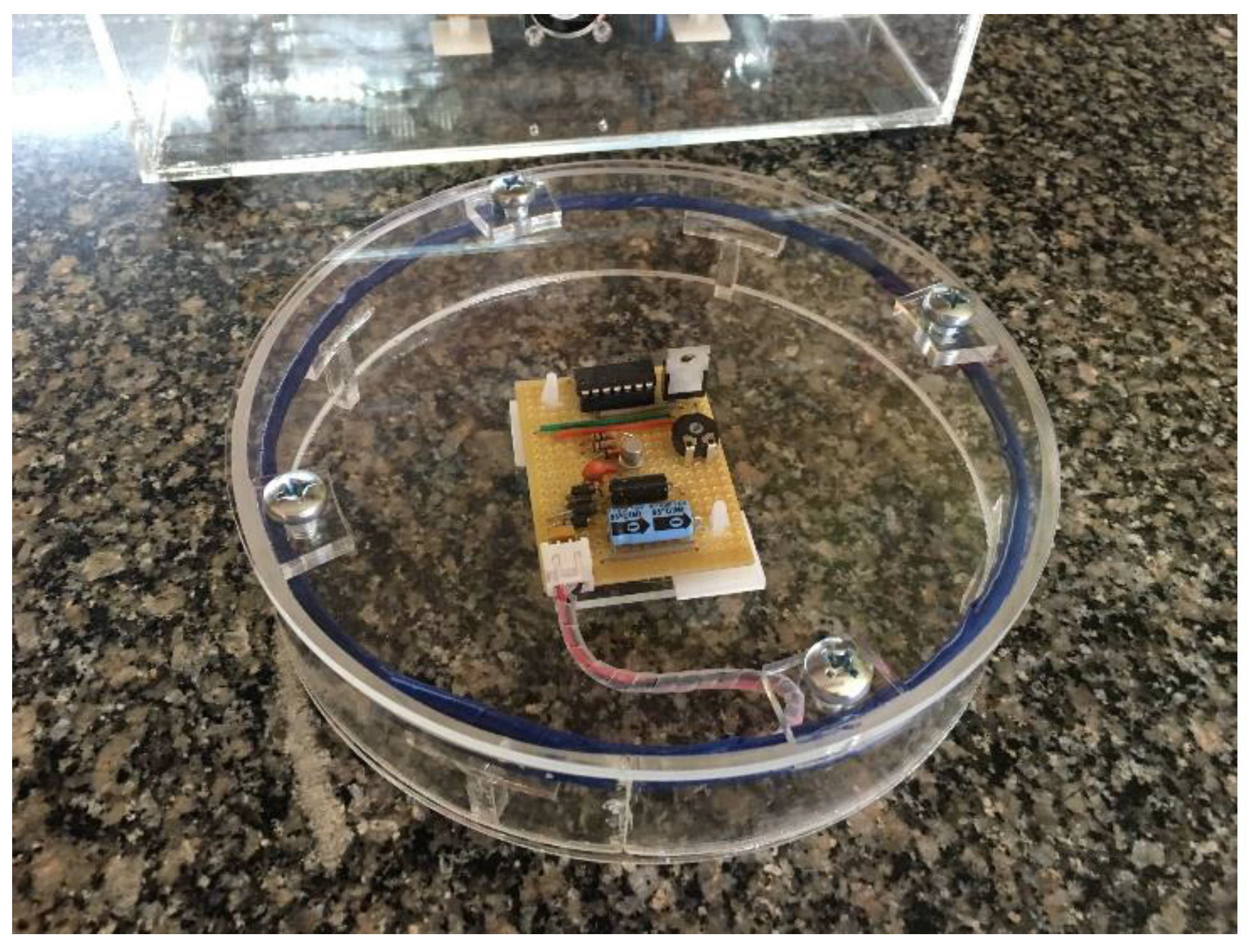
4.2. RFID Transponder Design
- 1)
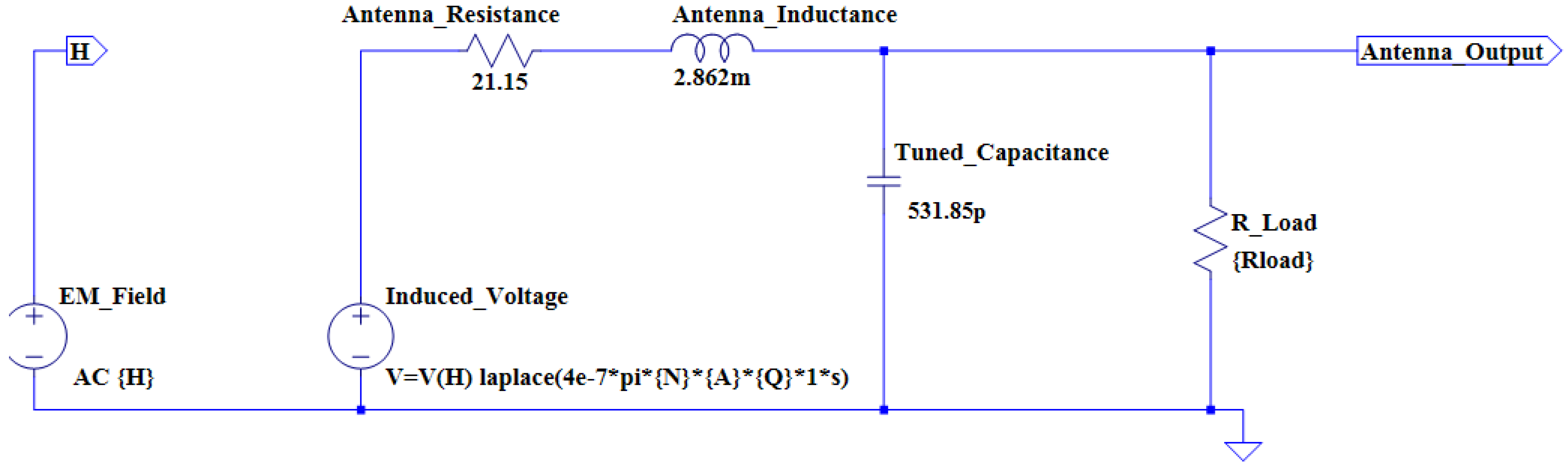
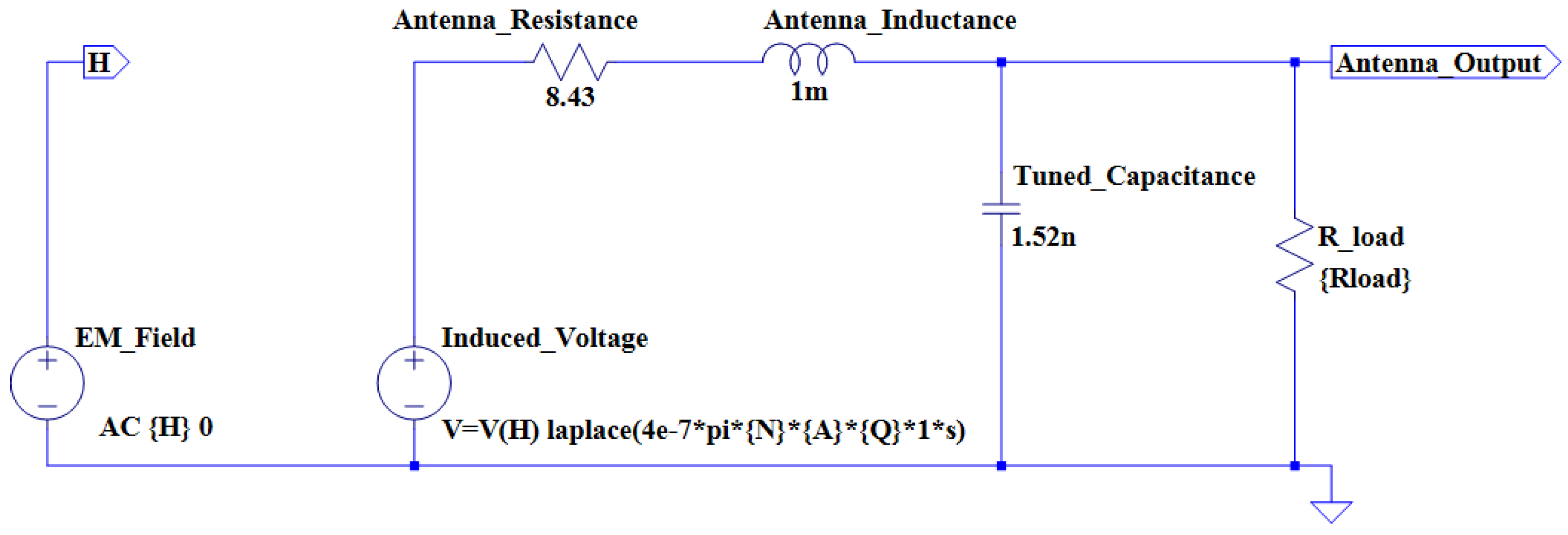
- Antenna simulations and hardware design: They are two options for the best practical implementation of the transponder. The first design choice is to make use of a circular shaped antenna, due to the fact that most off-the-shelf passive tags today has an internal circular coil. The equation for the inductance of an N-turn multilayer circular coil is as follows [22]:where L is the inductance of the coil in μH, a is the average radius of the coil in centimeters, N is the number of windings of the coil, h is the height of the coil windings in cm, and b is the thickness of the coil windings in cm. Table 4 shows the design parameters of the circular coil.
- 2)
- Transponder power supply circuitry: The designed LC tank provides two important abilities to the RFID transponder. The first ability is that the transponder can draw the required power for effective operation from the RF-field. As mentioned above, this power is made available by the RFID reader module. The second ability is that the transponder can effectively communicate with the RFID reader [23] module through the RF-field. This allows for the transfer of the transponder ID to the reader module.
- 3)
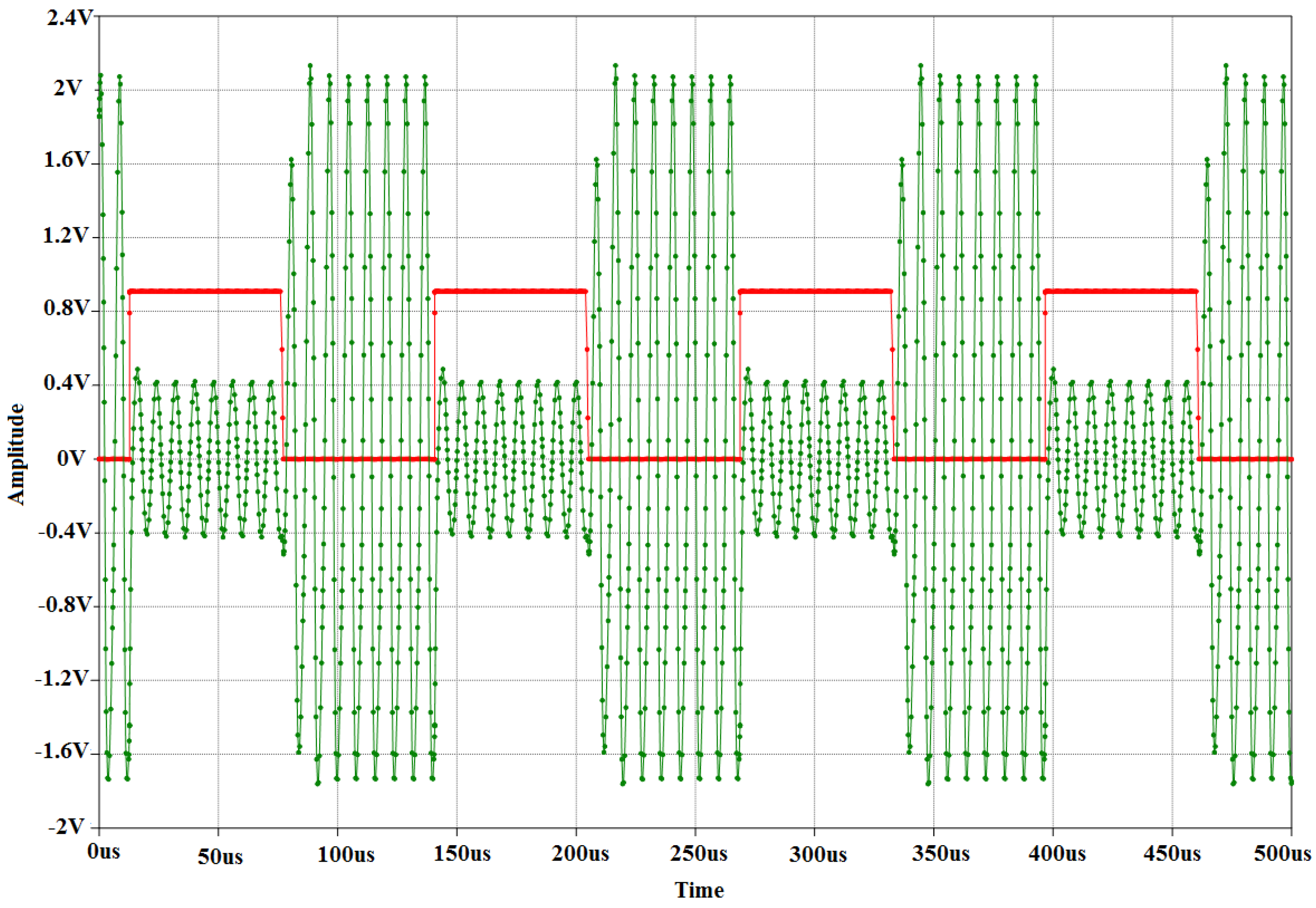
- Transponder load modulation circuitry: The next phase in the design process is to design, simulate, and implement the load modulation circuit. The purpose of the load modulation circuit is to manipulate the RF-field between the reader and transponder, in order to transmit data from the transponder to the reader. The load modulator consists of a resistor and a switch. The resistor is directly connected to the LC tank. The purpose of the switch is to connect or disconnect the resistor to or from the antenna. By doing so, the parameters of the transponder resonant circuit are changed, which results in variations in the magnitude and phase of the transponder impedance (modulation). The variations can be detected by the reader through the RF-field, and by applying an appropriate procedure, the reader can reconstruct (demodulate) the transmitted data. The switch is implemented with the use of a FET, due to the fact that FETs are used in the construction and fabrication of logic switches in the field of microelectronics. A PIC microcontroller is used as the data carrier, and the transmission pin of the data carrier is directly connected to the gate of the FET. This allows the data carrier to have full control over the modulation. The source of the FET is connected to the resistor which, in turn, is connected to one of the resonant circuit terminals. Figure 6 shows the simulation model for the load modulator. A simple clock divider circuit is implemented in order to simplify the simulation of load modulation. The purpose of the clock divider is to simulate the real-time transmission of data from the microcontroller. The EM4100 RFID communication protocol has been implemented on the transponder. This implies that data bits are transmitted at a rate of 2 kHz. In the simulation, a sine wave generator is used to simulate the induced voltage in the resonant circuit. The resonant circuit is represented by an inductor and capacitor. The load modulator is connected to the resonant circuit and receives a square wave input from the clock divider. Figure 6 shows the transient analysis of the load modulator simulation.
- 4)
- Transponder data carrier: The transponder resonant circuit, load modulator, and power supply unit have been designed and implemented in hardware, as discussed above. The hardware components allow for the harnessing of power and the transmission of data. Next, in the transponder design is to implement the data carrier. The data carrier serves the purpose of transmitting the digital ID of the transponder. An ID, consisting of 10 hexadecimal values for compliance to the EM4100 RFID communication protocol, is chosen and converted to the corresponding binary values. A software routine is implemented on the microcontroller to transmit the corresponding bit values. Transmission is done by controlling the voltage of one of the microcontroller pins (a high pin voltage corresponds to the transmission of a binary one and a low pin voltage corresponds to a binary zero). The main constraint in the transponder design is the amount of power available. It is, therefore, decided to use a low-power microcontroller for the data carrier.
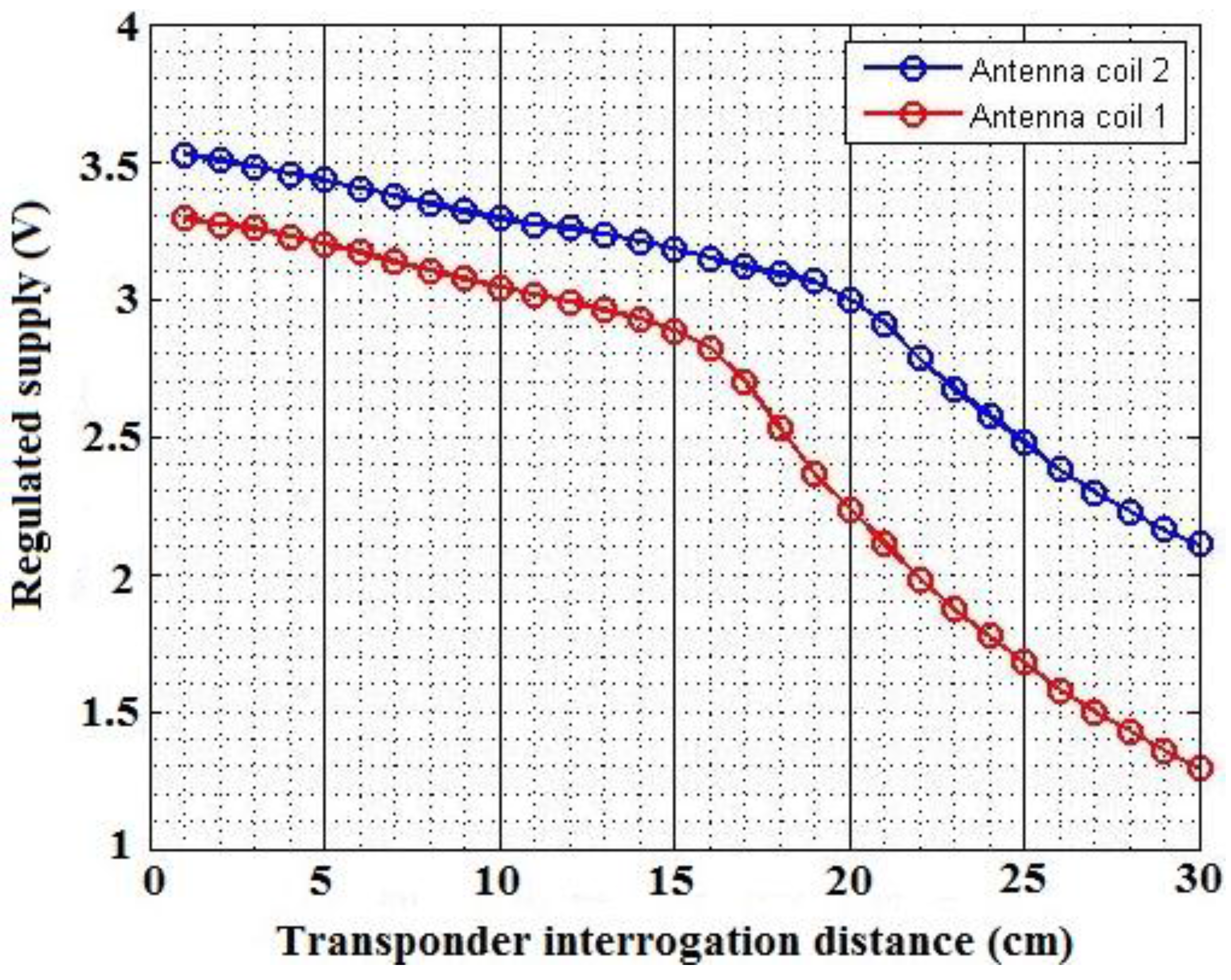
5. Results
RFID Transponder Power Transfer
6. Future Works
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Miorandi, D.; Sicari, S.; de Pellegrini, F.; Chlamtac, I. Internet of things: Vision, applications and research challenges. Ad Hoc Netw. 2012, 10, 1497–1516. [Google Scholar] [CrossRef]
- Olivares-Mendez, M.; Sanchez-Lopez, J.; Jimenez, F.; Campoy, P.; Sajadi-Alamdari, S.; Voos, H. Vision-Based Steering Control, Speed Assistance and Localization for Inner-City Vehicles. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Lee, B.-H.; Song, J.-H.; Im, J.-H.; Im, S.-H.; Heo, M.-B.; Jee, G.-I. GPS/DR Error Estimation for Autonomous Vehicle Localization. Sensors 2015, 15, 20779–20798. [Google Scholar] [CrossRef] [PubMed]
- Reina, G.; Johnson, D.; Underwood, J. Radar Sensing for Intelligent Vehicles in Urban Environments. Sensors 2015, 15, 14661–14678. [Google Scholar] [CrossRef] [PubMed]
- Larijani, L. GPS for Everyone: How the Global Positioning System Can Work for You; American Interface Corporation: New York, NY, USA, 1998. [Google Scholar]
- Smith, E.; Gennaoui, F.; Haddad, S. Road Transport of Dangerous Goods. Highw. Eng. Aust. 1985, 17, 18–21. [Google Scholar]
- Kaur, M.; Sandhu, M.; Mohan, N.; Sandhu, P.S. RFID Technology Principles, Advantages,Limitations & Its Applications. Int. J. Comput. Electr. Eng. 2011, 3, 151–157. [Google Scholar]
- SAPS. An Analysis of the National Crime Statistics. Available online: http://www.saps.gov.za/about/stratframework/annual_report/2013_2014/crime_statreport_2014_part1.pdf (accessed on 22 June 2015).
- Planas, E.; Pastor, E.; Presutto, F.; Tixier, J. Results of the MITRA project: Monitoring and intervention for the transportation of dangerous goods. J. Hazard. Mater. 2008, 152, 516–526. [Google Scholar] [CrossRef] [PubMed]
- Farooq, U.; Haq, T.U.; Amar, M.; Asad, M.U.; Iqbal, A. GPS-GSM integration for enhancing public transportation management services. In Proceedings of the 2nd International Conference on Computer Engineering and Applications (ICCEA), Bali Island, Indonesia, 19–21 March 2010.
- Al-Taee, M.A.; Khader, O.B.; Al-Saber, N.A. Remote monitoring of vehicle diagnostics and location using a smart box with global positioning system and general packet radio service. In Proceedings of the IEEE/ACS International Conference on Computer Systems and Applications (AICCSA), Amman, Jordan, 13–16 May 2007; pp. 385–388.
- Al Khedher, M.A. Hybrid GPS-GSM Localization of Automobile Tracking System. Int. J. Comput. Sci. Inf. Technol. 2011, 3, 75–85. [Google Scholar] [CrossRef]
- Wu, B.; Chen, Y.; Huang, P. A Localization-Assistance System using GPS and Wireless Sensor Networks for Pedestrian Navigation. J. Converg. Inf. Technol. 2012, 7, 146–155. [Google Scholar]
- Roberts, C.M. Radio frequency identification (RFID). Comput. Secur. 2006, 5, 18–26. [Google Scholar] [CrossRef]
- Finkenzeller, K. RFID Handbook: Fundamentals and Applications in Contactless Smart Cards, Radio Frequency Identification and Near-Field Communication; John Wiley & Sons: Chichester, UK, 2010. [Google Scholar]
- Liu, X.; Shannon, J.; Voun, H.; Truijens, M.; Chi, H.L.; Wang, X. Spatial and temporal analysis on the distribution of active radio-frequency identification (RFID) tracking accuracy with the kriging method. Sensors 2014, 14, 20451–20467. [Google Scholar] [CrossRef] [PubMed]
- Siror, J.K.; Liang, G.; Pang, K.; Sheng, H.; Wang, D. Impact of RFID Technology on Tracking of Export Goods in Kenya. J. Converg. Inf. Technol. 2010, 5, 190–199. [Google Scholar]
- Zhang, E.; Kuang, Y.; Jiang, W.; Umer, M.A. Active RFID positioning of vehicles in road traffic. In Proceedings of the 11th International Symposium on Communications and Information Technologies (ISCIT), Hangzhou, China, 12–14 October 2011; pp. 222–227.
- Wang, Z.; Ye, N.; Reza, M.; Wang, R.; Li, P. TMicroscope: Behavior Perception Based on the Slightest RFID Tag Motion. Available online: http://www.inzeko.ktu.lt/index.php/elt/article/view/14603/7556 (accessed on 31 May 2016).
- Ye, N.; Wang, Z.; Reza, M.; Wang, R.; Abdul, H.A. Design of Accurate Vehicle Location System Using RFID. Available online: http://www.eejournal.ktu.lt/index.php/elt/article/viewFile/5405/2937 (accessed on 31 May 2016).
- RFIDRW-E-232E Enhanced Animal tag and RFID reader writer with external antenna. Available online: http://www.priority1design.com.au/rfidrw-e-232e.pdf (accessed on 31 May 2016).
- Lee, Y. RFID Coil Design. Available online: http://www.t-es-t.hu/download/microchip/an678b.pdf (accessed on 31 May 2016).
- Wang, Z.; Ye, N.; Reza, M.; Zhao, T.; Wang, R. Measuring the Similarity of PML Documents with RFID-based Sensors. Int. J. Ad Hoc Ubiquitous Comput. 2014, 17, 174–185. [Google Scholar] [CrossRef]
- Zekavat, S.A.R. Electrical Engineering: Concepts and Applications, 1st ed.; Pearson Education Limited: Harlow, UK, 2013. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Specification Value |
|---|---|
| Supply voltage | 5.5–15 V |
| Operating current | 38 mA |
| Operating temperature | 0 °C to 85 °C |
| Maximum antenna voltage | 250 V peak-to-peak |
| Maximum antenna current | 200 mA |
| Command Number | AT Command | General/GPS/GSM |
|---|---|---|
| 1 | AT | General |
| 2 | AT + CBC | General |
| 3 | AT + CGPSPWR = 1 | GPS |
| 4 | AT + CGPSPWR = 0 | GPS |
| 5 | AT + CGPSSTATUS? | GPS |
| 6 | AT + CGPSINF = 32 | GPS |
| 7 | AT + CSTT | GSM |
| 8 | AT + CIICR | GSM |
| 9 | AT + CIFSR | GSM |
| 10 | AT + CIPSTART | GSM |
| 11 | AT + CIPSEND | GSM |
| 12 | AT + CIPCLOSE | GSM |
| Internal Parameters | Units of Measurement |
|---|---|
| Radiation resistance | Ohm (Ω) |
| DC resistance | Ohm (Ω) |
| Skin effect resistance | Ohm (Ω) |
| Wire inductance | Henry (H) |
| Loop inductance | Henry (H) |
| Parasitic capacitance | Farad (F) |
| Antenna Parameters | Parameter Values |
|---|---|
| Wire diameter | 0.2 mm |
| Coil diameter (a) | 160 mm |
| Coil width (b) | 2 mm |
| Coil height (h) | 2 mm |
| Number of windings (N) | 60 |
| Antenna Parameters | Parameter Values |
|---|---|
| Wire diameter | 0.4 mm |
| Coil diameter (a) | 130 mm |
| Coil width (b) | 3 mm |
| Coil height (h) | 3 mm |
| Coil inductance | 1 mH |
| Number of windings (N) | ? |
| Antenna Parameters | Circular Coil | Square Coil |
|---|---|---|
| Calculated theoretical inductance (mH) | 2.862 | 1 |
| Measured inductance (mH) | 2.695 | 1.3 |
| Calculated tuning capacitance value (pF/nF) | 531 pF | 1.52 nF |
| Capacitance value required based on the practical inductance value (pF/nF) | 560 pF | 1.82 nF |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prinsloo, J.; Malekian, R. Accurate Vehicle Location System Using RFID, an Internet of Things Approach. Sensors 2016, 16, 825. https://doi.org/10.3390/s16060825
Prinsloo J, Malekian R. Accurate Vehicle Location System Using RFID, an Internet of Things Approach. Sensors. 2016; 16(6):825. https://doi.org/10.3390/s16060825
Chicago/Turabian StylePrinsloo, Jaco, and Reza Malekian. 2016. "Accurate Vehicle Location System Using RFID, an Internet of Things Approach" Sensors 16, no. 6: 825. https://doi.org/10.3390/s16060825
APA StylePrinsloo, J., & Malekian, R. (2016). Accurate Vehicle Location System Using RFID, an Internet of Things Approach. Sensors, 16(6), 825. https://doi.org/10.3390/s16060825