
An IMU Evaluation Method Using a Signal Grafting Scheme

Abstract
:1. Introduction
- (1)
- Lab Calibration
- (2)
- INS Simulation
- (3)
- Field Testing
- (1)
- It can not only improve the efficiency and flexibility of the experiment, but also save the cost of evaluation. In the SG method, only one set of typical field tests with a higher-grade (e.g., navigation-grade) IMU is needed, and the collected data can be used as reference data to evaluate various IMUs in future. For the IMUs to be tested, only data collected in lab are needed, as such data can be grafted to the reference data to generate the SG IMU data (i.e., IMU signals that are generated by using the SG method and can be used in the same way as those collected in real field tests).
- (2)
- The SG method provides an extra evaluation approach before the implementation of real field tests. This is important because various types of IMUs from different manufacturers come to the market every year. Thus, it is not time- and cost-affordable for a researcher to develop the data-collection hardware platform and algorithm for every IMU, and evaluate them through real tests. However, through the use of the SG method, one can first evaluate an IMU by simply grafting its signals to the reference data, and can decide whether to buy the development kit and test the IMU or not.
- (3)
- It provides a general evaluation process for various IMUs. Specifically, with this method, it is feasible to compare the navigation performances (e.g., the attitude and position results) of different IMUs directly when the signals from these IMUs are grafted to the same set of reference trajectory. In this case, it is similar to the case that different types of IMU were installed on the same point on the same vehicle that moved with the same motion conditions, and in the same navigation environment.
- (4)
- To use the SG method, only one set of real test trajectories (i.e., the reference trajectory) is needed. Thus, one can focus on designing and optimizing this trajectory. Once the reference trajectory has been well-designed (e.g., it covers various types of vehicle motions and experiences different kinds of navigation environments such as open sky, urban canyon, forest, and underground for land-based navigation applications), this trajectory is valuable for the other researchers. The peers can also graft their IMU signals to the reference signal and implement the SG method to evaluate their IMUs.
- (5)
- The SG method can generate datasets under some extreme conditions (e.g., in the condition of extreme temperature or quick temperature variation), which cannot be achieved through real field tests.
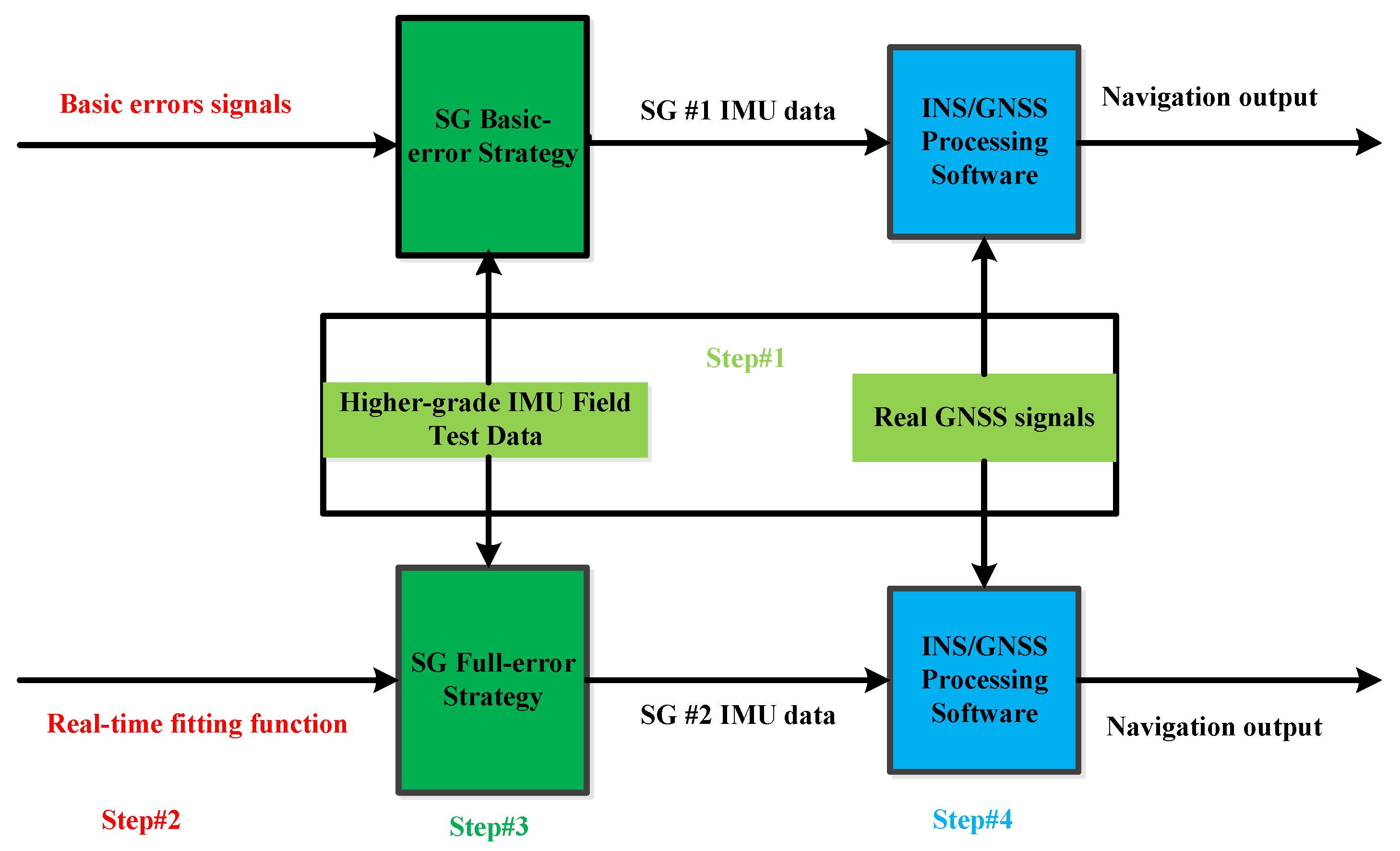
- (1)
- Basic-error strategy: grafting the extracted basic sensor errors to the reference data to generate the SG #1 IMU data, and
- (2)
- Full-error strategy: using the real-time function graft the full set of IMU errors (i.e., basic sensor errors + dynamic sensor errors) to the reference data to generate the SG #2 IMU data, and comparing their results.
2. Methodology
2.1. Step #1: Reference Signals Generation
2.1.1. Sensor Error Models
2.1.2. Lab Calibration
2.2. Step #2: Obtain IMU Basic Error Signals and Real-Time Fitting Functions in-Lab
- (a)
- Basic errors signals
- (b)
- Real-time fitting function
2.3. Step #3: Signal Grafting (SG)
2.4. Step #4: Data Processing and Performance Evaluation
- (a)
- Kalman Filter Dynamic Models
- (b)
- Kalman Filter Measurement Models
- ■
- Compared to the lab calibration method, the SG method can implement the evaluation at the navigation performance level, instead of the sensor error level.
- ■
- Compared to the INS simulation method, the SG method uses real signals. First, the vehicle motion types and parameters, navigation scenarios, and GNSS signals are all real. Meanwhile, sensor errors are extracted from the real data of the tested IMU, instead of being simulated by using sensor error models.
- ■
- Compared to the field testing method, the SG method is much more efficient and economic. In the SG method, only one set of typical field tests with a higher-grade IMU is needed and can be used to evaluate various IMUs in future. Only data collected in the lab are needed from the tested IMUs; this implementation saves the hardware cost and time for the both the standalone INS and hardware integration with GNSS. Moreover, the SG method can provide datasets collected under some extreme conditions (e.g., under the condition of extreme temperature or quick temperature variation), which cannot be achieved through real field tests.
3. Experimental Verification
3.1. Test Nomenclature
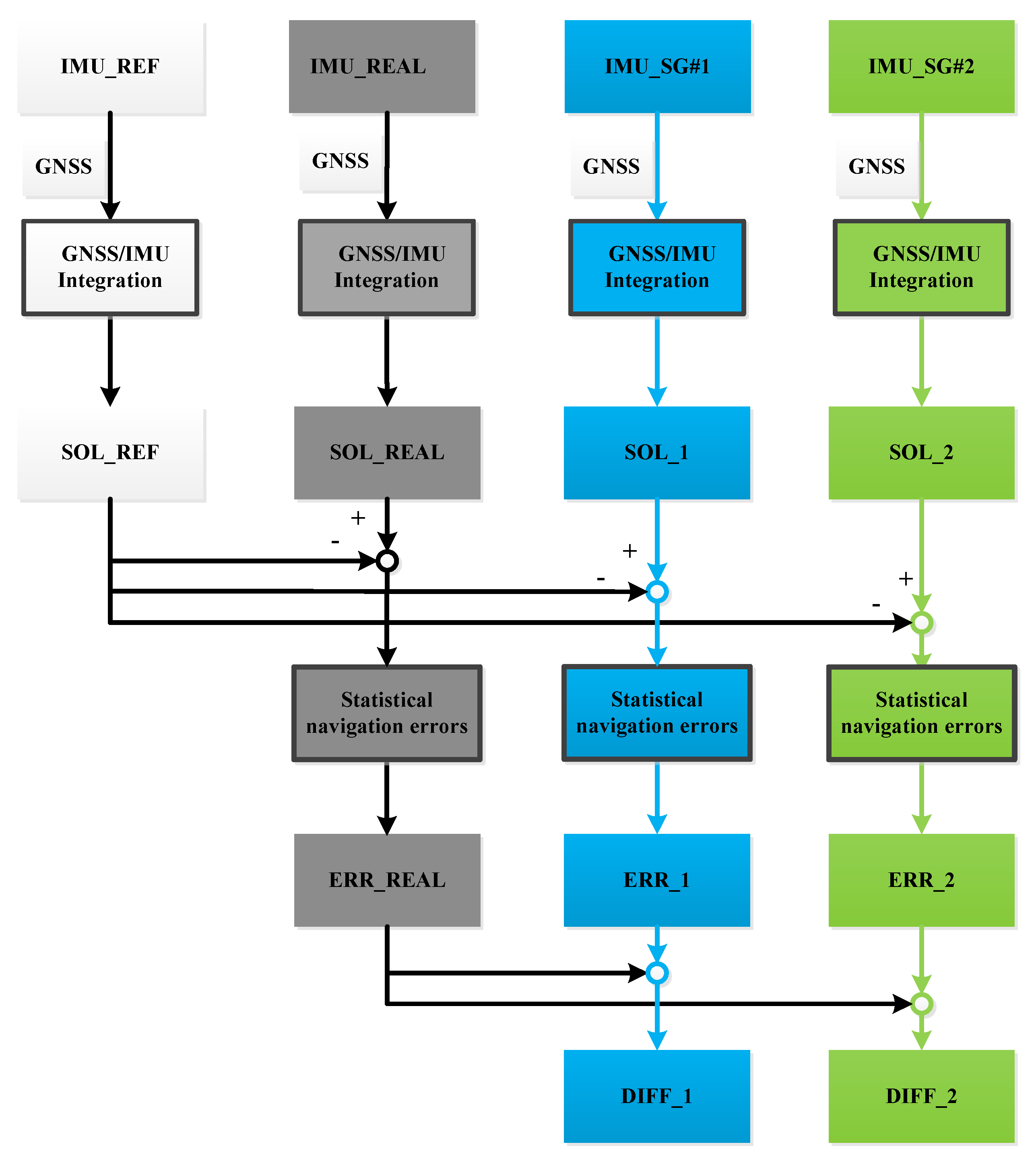
- (a)
- IMU_SG#1: IMU data generated by using the basic-error strategy that considers basic IMU errors.
- (b)
- IMU_SG#2: IMU data generated by using the full-error strategy that considers the full set of IMU errors.
- (c)
- IMU_REAL: real outputs of the tested IMU.
- (d)
- IMU_REF: real outputs of the higher-grade IMU.
- (e)
- SOL_1: generating navigation solutions through the integration of the IMU_SG#1 and real GNSS data.
- (f)
- SOL_2: generating navigation solutions through the integration of the IMU_SG#2 and real GNSS data.
- (g)
- SOL_REAL: generating navigation solutions through the integration of the real outputs of the tested IMU and real GNSS data.
- (h)
- SOL_REF: generating navigation solutions through the integration of the real outputs of the higher-grade IMU and real GNSS data.
- (i)
- ERR _1: absolute differences between SOL_1 and SOL_REF solutions.
- (j)
- ERR_2: absolute differences between SOL_2 and SOL_REF solutions.
- (k)
- ERR_REAL: absolute differences between SOL_REAL and SOL_REF solutions.
- (l)
- DIFF _1: result of ERR_1 divided by ERR_REAL.
- (m)
- DIFF _2: result of ERR_2 divided by ERR_REAL. DIFF _2 is an external indicator, which is used to reflect the performance of the proposed SG method by comparing its results with those from field testing. The difference between DIFF_2 and DIFF_1 indicate the internal differences between results when using the same SG method but following two SG strategies:
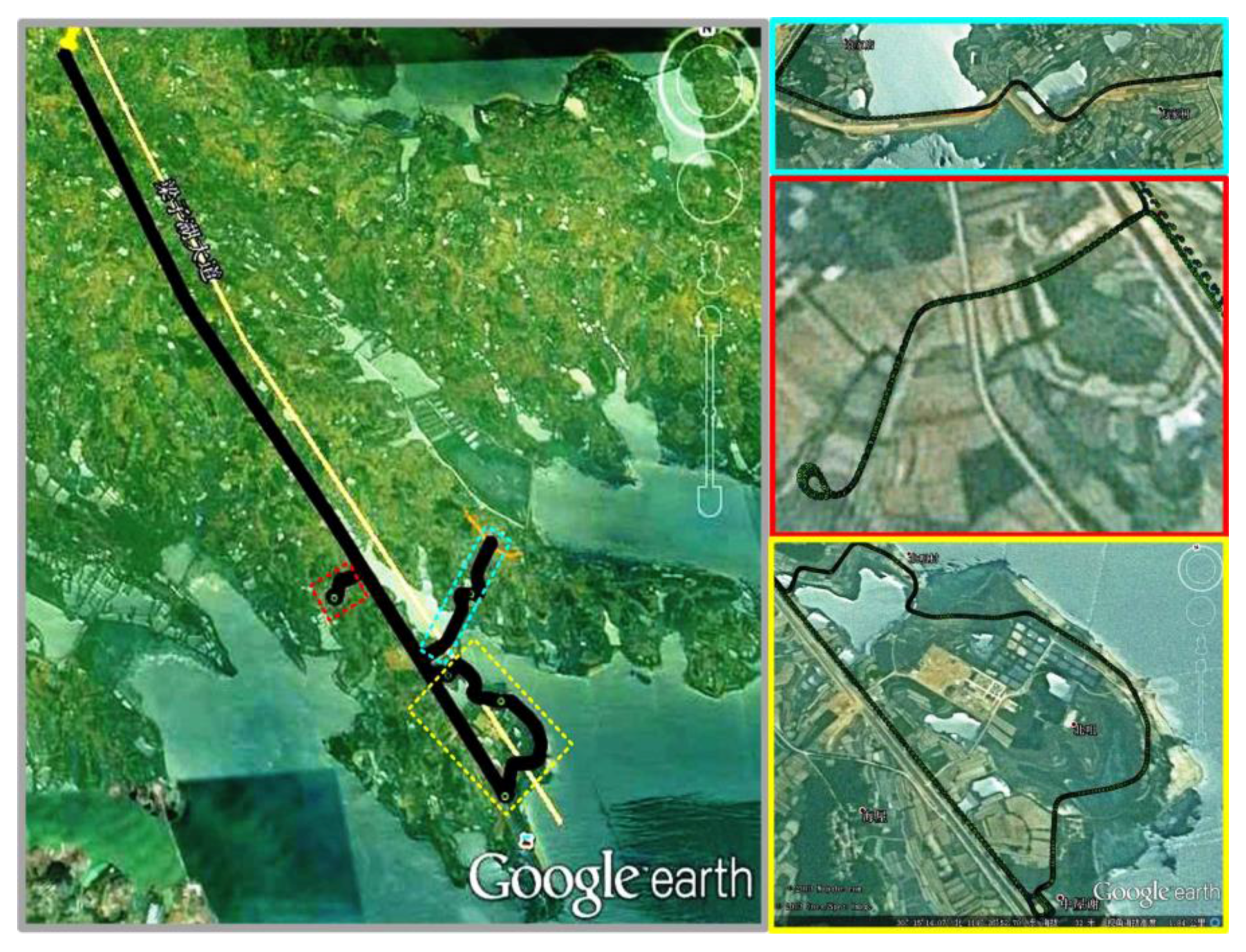
3.2. Test Description
3.3. Results and Analysis
3.3.1. Tactical-grade IMU: MP-POS310
- ■
- When navigating with a standalone, tactical-grade IMU for 60 s, the navigation accuracy was 5 m for horizontal positions, 0.7 m for vertical position, 0.03 deg for horizontal attitudes, and 0.1 deg for the heading. The navigation accuracy was described by the root mean square (RMS) values of the navigation errors (i.e., differences between navigation results and the corresponding results from the reference system). The RMS values are calculated by using the INS navigation errors during multiple GNSS outage periods. Among 23 GNSS outage periods, the maximum values of position drifts were 10.350 m, 6.827 m, and 0.897 m along the north, east, and down directions, respectively. The maximum attitude drifts reached 0.053 deg, 0.043 deg, and 0.165 deg for roll, pitch, and heading, respectively.
- ■
- The difference between the ERR_2 and ERR_REAL solutions was below 5% for both position and attitude errors. This outcome illustrated that when navigating this tactical-grade IMU by itself over a periods of 60 s, the proposed SG method can achieve the similar performance to field tests that utilized real IMU data.
- ■
- The difference between the ERR_1 and ERR_2 solutions were under 7% for horizontal attitude errors, and nearly 20% for position errors and 28% for the heading error. This phenomenon indicated that the differences between the basic-error strategy (i.e., considering only basic IMU errors) and the full-error strategy (i.e., considering the full set of IMU errors) results were significant for both position and heading in this case. When comparing results with and without GNSS, it was found that the dynamic sensor errors had larger impact on the SG method when there was no GNSS updates.
3.3.2. MEMS IMU: MP-POS1100
- ■
- When navigating with this MEMS IMU for 60 s, the navigation accuracy (RMS) increased to 20 m for horizontal positions, 8 m for vertical position, 0.12 deg for horizontal attitudes, and 0.5 deg for the heading. Such values were much larger than the corresponding values in Table 2 (with a tactical-grade IMU). These outcomes make sense when comparing the sensor errors of these two IMUs. Among all GNSS outage periods, the maximum values of position drifts were 23.930 m, 25.858 m, and 5.072 m along the north, east, and down directions, respectively. The maximum attitude drifts reached 0.152 deg, 0.142 deg, and 0.902 deg for roll, pitch, and heading, respectively.
- ■
- The differences between the ERR_2 and ERR_REAL solutions were below 20% for position and horizontal attitude errors, and 30% for heading errors. These differences were larger than those in Table 2, but not significant in general. When analyzing the trend of the heading errors, we found that the differences mainly occurred during the periods when the vehicle was moving straight with a constant velocity. Thus, the reason for the occurrence of differences may be explained as follows: GNSS/INS integrated navigation systems suffer from poor observability of the heading angle when the vehicle moved with weak dynamics [13,33,34]. Such an observability issue may cause large uncertainty of the heading estimation result.
- ■
- The largest difference between the ERR_1 and ERR_2 occurred in the vertical position errors (33%). The difference in DIFF_1 and DIFF_2 results further supported the outcome that the dynamic sensor errors may have significant impact on the SG method when there was no GNSS update.
- ■
- For the tested tactical-grade IMU, the difference between the SG and field testing errors were below 4.2% for all position and attitude errors when there were frequent GNSS outages (lasted for 60 s). For the tested MEMS IMU, the maximum differences between the SG and field testing errors was 19.4% for positions, 19.4% for horizontal attitudes, and 26.7% for heading, when there were frequent GNSS outages (lasted for 60 s). The reason for the occurrence of differences is the differences between the grafted signals and real signals. For the tested tactical-grade IMU, the sensor error has good stability, the grafted signals can basically reflect real changes in the degree and level. However, for the tested MEMS IMU, the stability of the sensor error is poorer; thus, the result is susceptible to interference and change. (Table 1 shows the specifications of various grades of IMUs).
4. Conclusions
Acknowledgements
Author Contributions
Conflicts of Interest
References
- Sasani, S.; Asgari, J.; Amiri-Simkooei, A. Improving MEMS-IMU/GPS integrated systems for land vehicle navigation applications. GPS Solut. 2016, 20, 89–100. [Google Scholar] [CrossRef]
- Georgy, J.; Noureldin, A.; Goodall, C. Vehicle navigator using a mixture particle filter for inertial sensors/odometer/map data/GPS integration. IEEE Trans. Consum. Electron. 2012, 58, 544–552. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, S.; Atia, M.M.; Noureldin, A. INS/GPS/LiDAR Integrated Navigation System for Urban and Indoor Environments Using Hybrid Scan Matching Algorithm. Sensors 2015, 15, 23286–23302. [Google Scholar] [CrossRef] [PubMed]
- Alvarez, J.C.; Alvarez, D.; López, A.; González, R.C. Pedestrian navigation based on a waist-worn inertial sensor. Sensors 2012, 12, 10536–10549. [Google Scholar] [CrossRef] [PubMed]
- Sun, W.; Gao, Y. Fiber-based rotary strapdown inertial navigation system. Opt. Eng. 2013, 52. [Google Scholar] [CrossRef]
- Martin, H.F.S.; Groves, P.D.; Newman, M.; Faragher, R. A new approach to better low-cost MEMS IMU performance using sensor arrays. In Proceedings of the 26th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2013), Nashville, TN, USA, September 16–20 2013; pp. 2125–2142.
- Varavva, V.; Hutton, J.; Lambert, A. Development of mapping position and orientation systems with commercial grade MEMS. In Proceedings of the 23th IEEE International Symposium on Inertial Sensors and Systems, Karlsruhe, HI, USA, 22–23 September 2015; pp. 1–12.
- Tawk, Y.; Tomé, P.; Botteron, C. Implementation and performance of a GPS/INS tightly coupled assisted PLL architecture using MEMS inertial sensors. Sensors 2014, 14, 3768–3796. [Google Scholar] [CrossRef] [PubMed]
- Ravani, B.; Sherrett, J.; Lasky, T. A Comparative Experimental Evaluation of IMU Designs. In Proceedings of the ASME IDETC Conference, Boston, MA, USA, 2–5 August 2015.
- Niu, X.; Goodall, C.; Nassar, S.; El-Sheimy, N. An efficient method for evaluating the performance of MEMS IMUs. In Proceedings of the IEEE/ION Position Location and Navigation Symposium, San Diego, CA, USA, 25–27 April 2006; pp. 1–6.
- Troni, G.; Kinsey, J.; Yoerger, D.; Whitcomb, L. Field performance evaluation of new methods for in-situ calibration of attitude and Doppler sensors for underwater vehicle navigation. In Proceedings of the Robotics and Automation (ICRA 2012), St. Paul, MN, USA, 14–18 May 2012; pp. 5334–5339.
- Abbott, E.; Powell, D. Land-vehicle navigation using GPS. Proc. IEEE 1999, 87, 145–162. [Google Scholar] [CrossRef]
- Hong, S.; Lee, M.; Chun, H. Observability of error states in GPS/INS integration. IEEE Trans. Veh. Technol. 2005, 54, 731–743. [Google Scholar] [CrossRef]
- Li, Y.; Niu, X.; Zhang, Q.; Zhang, H.; Shi, C. An in situ hand calibration method using a pseudo-observation scheme for low-end inertial measurement units. Meas. Sci. Technol. 2012, 23, 105104. [Google Scholar] [CrossRef]
- Chatfield, A.B.C. Fundamentals of High Accuracy Inertial Navigation, 3rd ed.; AIAA: Reston, VA, USA, 1997; pp. 79–99. [Google Scholar]
- Shin, E.; El-Sheimy, N. A new calibration method for strapdown inertial navigation systems. Z. Vermess. 2002, 127, 41–50. [Google Scholar]
- Nassar, S. Improving the Inertial Navigation System (INS) Error Model for INS and INS/DGPS Applications. Ph.D. Thesis, Department of Geomatics Engineering, University of Calgary, Calgary, AB, Canada, 2006. [Google Scholar]
- Aggarwal, P.; Syed, Z.; Niu, X.; El-Sheimy, N. A standard testing and calibration procedure for low cost MEMS inertial sensors and units. J. Navig. 2008, 61, 323–336. [Google Scholar] [CrossRef]
- Grewal, M.S. Kalman Filtering; Springer Berlin Heidelberg: New York, NY, USA, 2011; pp. 705–717. [Google Scholar]
- Liu, A.; Wu, H.; Dai, H. Modeling and simulation of the warship deformation estimation based on inertial sensors. In Proceedings of the Guidance, Navigation and Control Conference (CGNCC 2014), Yantai, China, 8–10 August 2014; pp. 2596–2599.
- Cheng, C.; Cheng, X.; Hao, X.; Zhao, M. Design and implementation of interactive strap-down inertial navigation simulation system for UAV. In Proceedings of the Chinese Society for Optical Engineering Conferences, Beijing, China, 12–15 November 2015; pp. 1–7.
- Zampella, F.; Jiménez, A.R.; Seco, F.; Prieto, J.C.; Guevara, J. Simulation of foot-mounted IMU signals for the evaluation of PDR algorithms. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN 2011), Guimaraes, Portugal, 21–23 September 2011; pp. 1–7.
- Chu, H.J.; Tsai, G.J.; Chiang, K.W.; Duong, T.T. GPS/MEMS INS data fusion and map matching in urban areas. Sensors 2013, 13, 11280–11288. [Google Scholar] [CrossRef] [PubMed]
- Adusumilli, S.; Bhatt, D.; Wang, H.; Bhattacharya, P.; Devabhaktuni, V. A low-cost INS/GPS integration methodology based on random forest regression. Expert Syst. Appl. 2013, 40, 4653–4659. [Google Scholar] [CrossRef]
- Zhu, K.; Zhang, C.; Song, N. Effection of Angle Random Walk of Fiber Optic Gyro (FOG) on INS. Piez. Acoust. 2007, 3, 292–294. [Google Scholar]
- Shin, E.-H. Estimation Techniques for Low-Cost Inertial Navigation. Ph.D. Thesis, Department of Geomatics Engineering, University of Calgary, Calgary, AB, Canada, 2006. [Google Scholar]
- Groves, P. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House: Boston, MA, USA, 2013; pp. 81–297. [Google Scholar]
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology, 2nd ed.; IET: Herts, United Kingdom, 2004; pp. 263–274. [Google Scholar]
- Wuhan MAP Space Time Navigation Technology Inc. Available online: http://www.whmpst.com/en/ (accessed on 8 June 2016).
- Niu, X.; Zhang, Q.; Gong, L.; Liu, C.; Zhang, H.; Shi, C.; Coleman, M. Development and evaluation of GNSS/INS data processing software for position and orientation systems. Surv. Rev. 2015, 47, 87–98. [Google Scholar] [CrossRef]
- Niu, X.; Zhang, H.; Shi, C.; Chiang, K.; El-Sheimy, N. A Proposed Evaluation Standard for the Navigation Results of MEMS INS/GPS Integrated Systems. In Proceedings of the International Symposium on GPS/GNSS (2010), Taipei, Taiwan, 26–28 October 2010; pp. 1–5.
- Mourcou, Q.; Fleury, A.; Franco, C.; Klopcic, F.; Vuillerme, N. Performance evaluation of smartphone inertial sensors measurement for range of motion. Sensors 2015, 15, 23168–23187. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sessa, S.; Zecca, M.; Lin, Z.; Bartolomeo, L.; Ishii, H.; Takanishi, A. A methodology for the performance evaluation of inertial measurement units. J. Intell. Robot. Syst. 2013, 71, 143–157. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.; Yao, M.; Ma, H.; Jia, W. Improving accuracy of the vehicle attitude estimation for low-cost INS/GPS integration aided by the GPS-measured course angle. IEEE Trans. Intell. Transp. Syst. 2013, 14, 553–564. [Google Scholar] [CrossRef]
- Dingjie, W.; Liang, Z.; Jie, W. On GNSS/MIMU integrated navigation system based on observability theory. In Proceedings of the 33rd Chinese Control Conference (CCC 2014), Nanjing, China, 28–30 July 2014; pp. 853–858.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Characteristic | IMU | ||
|---|---|---|---|---|
| MP-POS830 | MP-POS310 | MP-POS1100 | ||
| Grade | Navigation | Tactical | MEMS | |
| Gyro | Bias instability (deg/h) | 0.005 | 0.5 | <10 |
| White noise (ARW, deg/sqrt (h)) | 0.0022 | 0.05 | 0.15 | |
| Scale Factor (ppm) | 10 | 300 | 1000 | |
| Accel. | Bias instability (mg) | 0.025 | 0.5 | <1 |
| White noise (VRW, m/s/sqrt (h)) | 0.00075 | 0.1 | 0.06 | |
| Scale Factor (ppm) | 10 | 300 | 1000 | |
| Position Errors (RMS, m) | Attitude Errors (RMS, deg) | ||||
|---|---|---|---|---|---|
| Horizontal * | Vertical | Roll | Pitch | Heading | |
| ERR_1 | 3.758 | 0.518 | 0.027 | 0.022 | 0.066 |
| ERR_2 | 4.857 | 0.651 | 0.029 | 0.025 | 0.093 |
| ERR_REAL | 4.688 | 0.651 | 0.029 | 0.024 | 0.097 |
| DIFF_1 | 19.84% | 20.43% | 6.90% | 8.33% | 31.96% |
| DIFF_2 | 3.60% | 0.00% | 0.00% | 4.17% | 4.12% |
| Position Errors (RMS, m) | Attitude Errors (RMS, deg) | ||||
|---|---|---|---|---|---|
| Horizontal * | Vertical | Roll | Pitch | Heading | |
| ERR_1 | 12.983 | 3.131 | 0.077 | 0.063 | 0.334 |
| ERR_2 | 20.422 | 7.842 | 0.113 | 0.117 | 0.378 |
| ERR_REAL | 17.657 | 6.566 | 0.100 | 0.098 | 0.516 |
| DIFF_1 | 26.47% | 52.31% | 23.00% | 35.71% | 35.27% |
| DIFF_2 | 15.66% | 19.43% | 13.00% | 19.39% | 26.74% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niu, X.; Wang, Q.; Li, Y.; Zhang, Q.; Jiang, P. An IMU Evaluation Method Using a Signal Grafting Scheme. Sensors 2016, 16, 854. https://doi.org/10.3390/s16060854
Niu X, Wang Q, Li Y, Zhang Q, Jiang P. An IMU Evaluation Method Using a Signal Grafting Scheme. Sensors. 2016; 16(6):854. https://doi.org/10.3390/s16060854
Chicago/Turabian StyleNiu, Xiaoji, Qiang Wang, You Li, Quan Zhang, and Peng Jiang. 2016. "An IMU Evaluation Method Using a Signal Grafting Scheme" Sensors 16, no. 6: 854. https://doi.org/10.3390/s16060854
APA StyleNiu, X., Wang, Q., Li, Y., Zhang, Q., & Jiang, P. (2016). An IMU Evaluation Method Using a Signal Grafting Scheme. Sensors, 16(6), 854. https://doi.org/10.3390/s16060854