
A Compact Forearm Crutch Based on Force Sensors for Aided Gait: Reliability and Validity


Abstract
:1. Introduction
2. Experimental Section
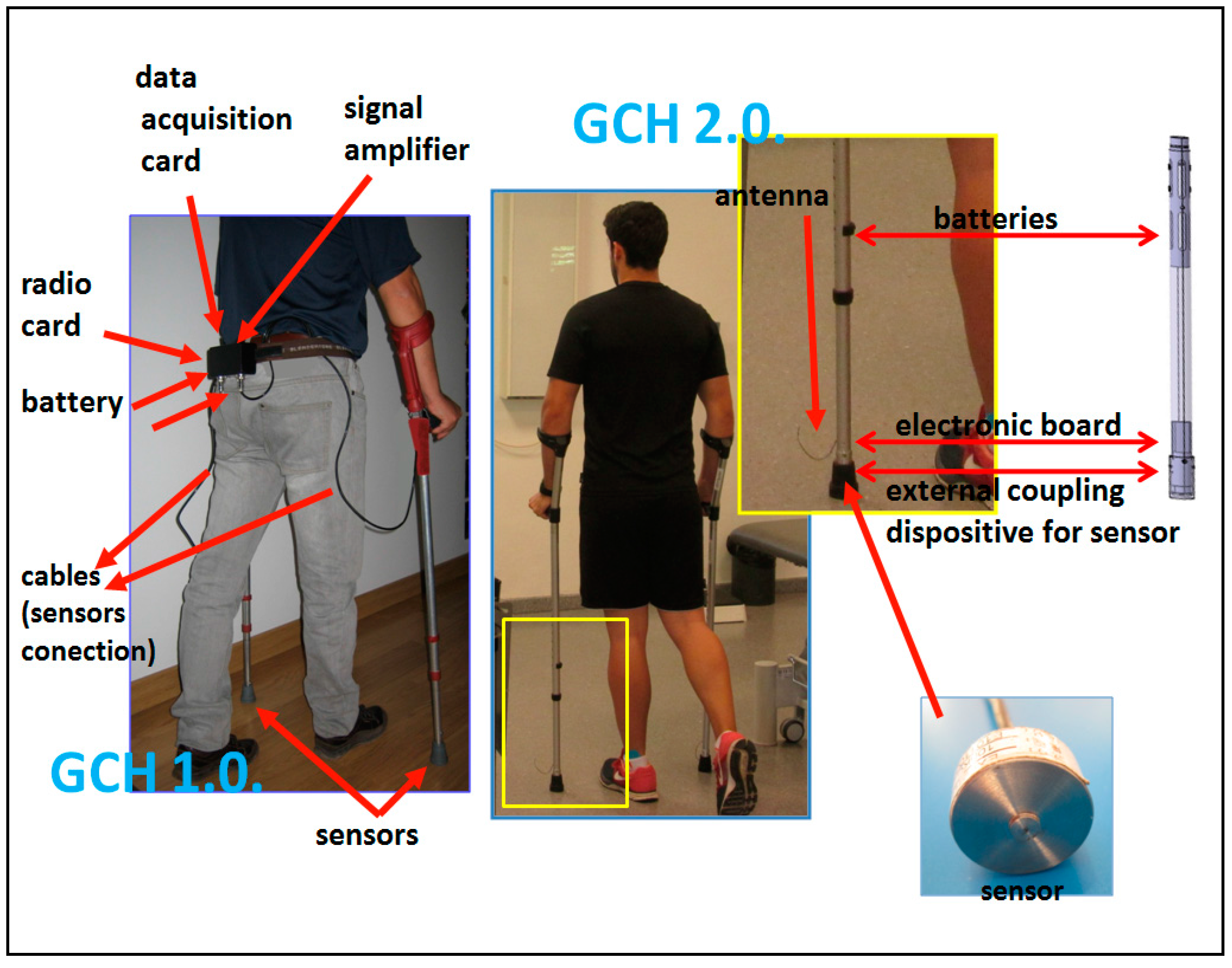
2.1. GCH System 2.0
Basic Functions of the GCH System 2.0
- Load control. The objective measurement of the loads applied to the crutches is the basis of the System. It shows the kilograms exerted on the crutches and the percentage of patient body weight (PPBW). This datum is the most relevant in the clinic, which always requires the subject’s current weight to be entered. The percentages allow researchers to compare intra-subject and inter-subject tests in order to establish treatment protocols.
- Feedback mechanism. The feedback information includes, individually, the ideal load exerted on the crutches (directly proportional to the unloading on the injured lower member), PPBW, according to the pathology and the treatment phase, introduced into the software as well as a percentage of error tolerated clinically due to excess or defect load. The fixed system alerts the subject of the mistakes made during gait for immediate self-correction (Figure 2). Acoustic signals, a continuous whistling, will be used if the recommended load is exceeded or discontinuous if it does not reach it; and visual, by using a projector. The portable system only uses an audible feedback. The fixed system shows only the feedback information useful for the patient’s training in the projector, and additional personalized clinical information (useful for the physiotherapist/researcher) on the computer screen.
2.2. Study Design
2.3. Study Variables
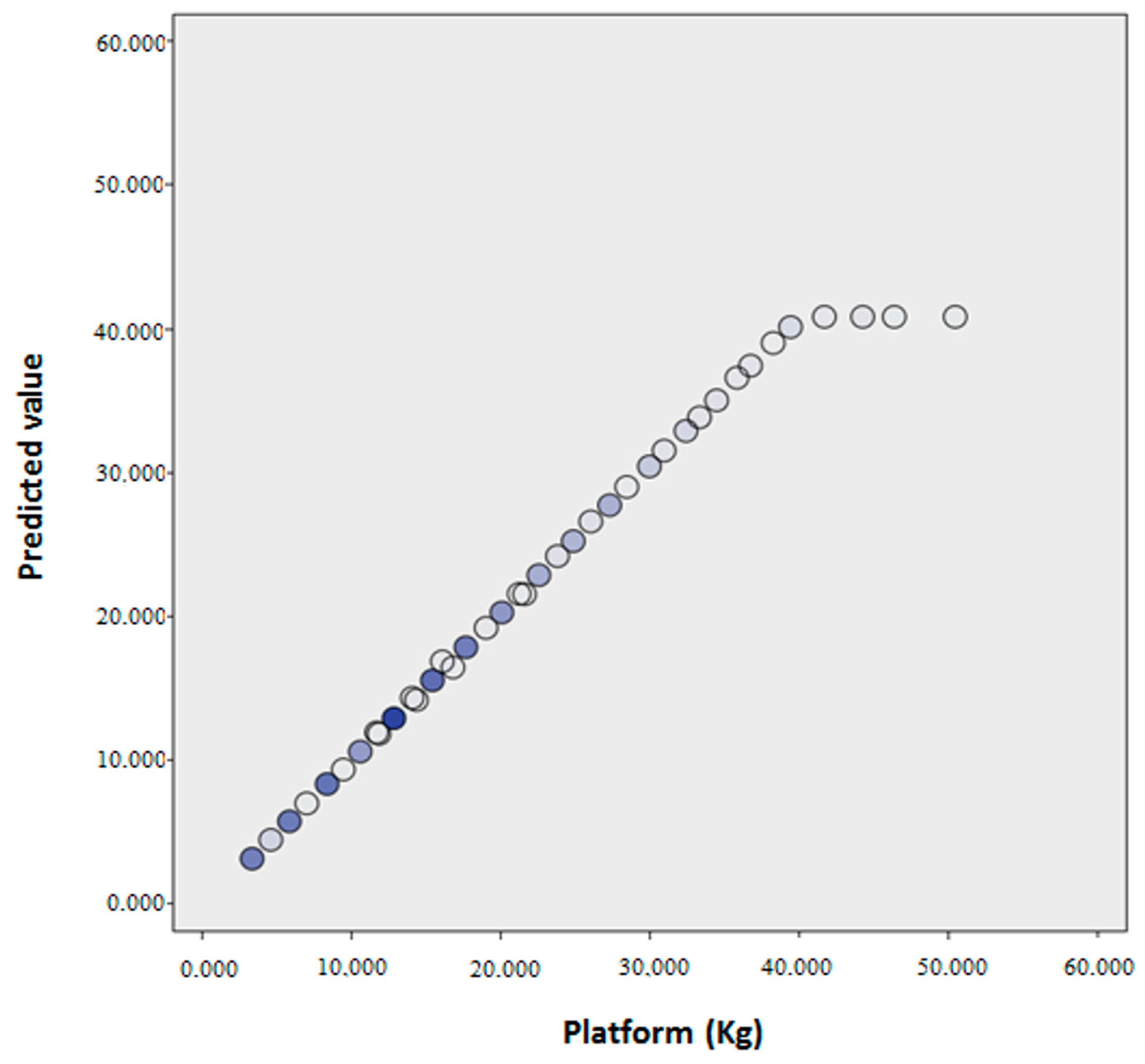
- Variable 1: GCH. Vertical reaction force of the Platform on the crutch (Z component) measured using our System. This variable is secreted in GCH_right and GCH_left, right and left crutches, respectively. The kg is used as a unit of measurement for GCH.
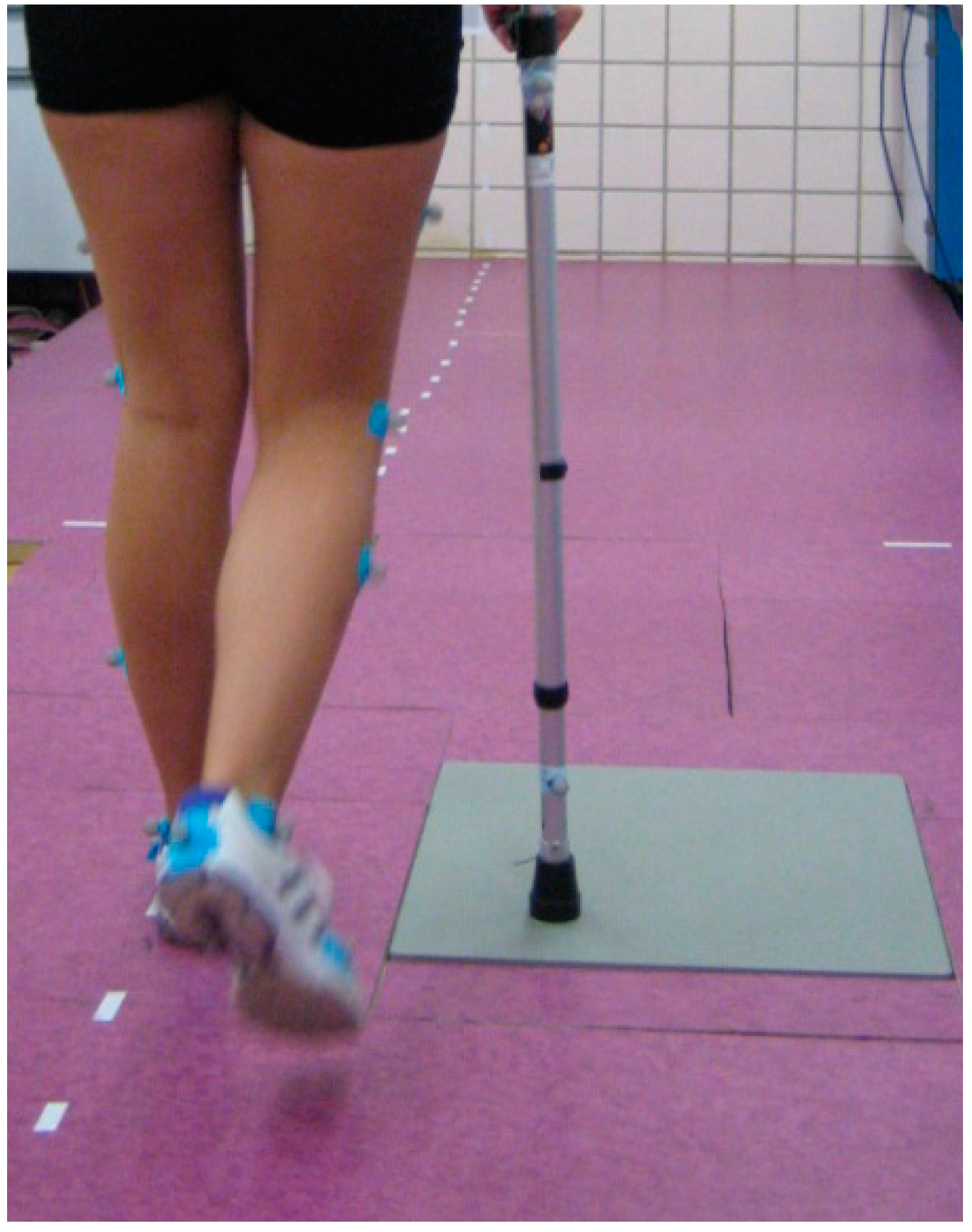
- Variable 2: Platform (kg). Vertical reaction force of the crutches on the Platform (Z component) calculated by the AMTI Platform. The unit of measurement was the kg.
2.4. Measurements and Participants
Inclusion Criteria
- healthy subjects between 18 and 60 years old with previous experience with crutches;
- presenting a normal gait, being asymptomatic on walking at free cadence;
- overcome a simple test of static equilibrium, consisting of keeping one’s balance on each foot for 30 s without great bodily movements [26].
Exclusion Criteria
- having an evident disorder of overall coordination and physical skill which could alter the aided gait.
2.5. Data Collection
2.6. Statistics
- t-test for related samples [30]: it compares the mean values of related samples when the values of the variables meet the normality criteria. This test was used to determine whether the two measurements can be considered similar. In addition, the study was performed based on the different ranges of weight loaded onto the crutches.
- Wilcoxon signed-rank test [30]: it compares the related sample distribution when the values of the variables do not meet the normality criteria.
3. Results
4. Discussion
Validity and Reliability
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| ANOVA | Analysis of Variance |
| FS | Full Scale |
| PCB | Printed Circuit Board |
| PPBW | Percentage of Patient Body Weight |
| SD | Standard Deviation |
| SMD | Surface Mount Device |
References
- Van Kammen, K.; Boonstra, A.; Reinders-Messelink, H.; den Otter, R. The combined effects of body weight support and gait speed on gait related muscle activity: A comparison between walking in the Lokomat exoskeleton and regular treadmill walking. PLoS ONE 2014, 9, e107323. [Google Scholar]
- Chamorro-Moriana, G.; Ridao-Fernández, C.; Ojeda, J.; Benítez-Lugo, M.; Sevillano, J.L. Reliability and validity study of the Chamorro Assisted Gait Scale for people with sprained ankles, walking with forearm crutches. PLoS ONE 2016, 11, e0155225. [Google Scholar] [CrossRef] [PubMed]
- Fischer, J.; Nuesch, C.; Gopfert, B.; Mundermann, A.; Valderrabano, V.; Hugle, T. Forearm pressure distribution during ambulation with elbow crutches: A cross-sectional study. J. Neuroeng. Rehabil. 2014, 11, 61. [Google Scholar] [CrossRef] [PubMed]
- Gates, D.H.; Darter, B.J.; Dingwell, J.B.; Wilken, J.M. Comparison of walking overground and in a Computer Assisted Rehabilitation Environment (CAREN) in individuals with and without transtibial amputation. J. Neuroeng. Rehabil. 2012, 9, 81. [Google Scholar] [CrossRef] [PubMed]
- Xu, P.T.; Li, Q.; Sheng, J.J.; Chang, H.; Song, Z.; Yu, Z.B. Passive stretch reduces calpain activity through nitric oxide pathway in unloaded soleus muscles. Mol. Cell. Biochem. 2012, 367, 113–124. [Google Scholar] [CrossRef] [PubMed]
- Moreira, L.D.F.; de Oliveira, M.L.; Lirani-Galvao, A.P.; Marin-Mio, R.V.; dos Santos, R.N.; Lazaretti-Castro, M. Physical exercise and osteoporosis: Effects of different types of exercises on bone and physical function of postmenopausal women. Arq. Bras Endocrinol. Metabol. 2014, 58, 514–522. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Robroy, L.M.; Davenport, D.E.; Paulseth, S.; Wukich, D.K.; Godges, J. Ankle stability and movement coordination impairments: Ankle ligament sprains. J. Orthop. Sports Phys. Ther. 2013, 43, A1–A40. [Google Scholar]
- Domingo, A.; Lam, T. Reliability and validity of using the Lokomat to assess lower limb joint position sense in people with incomplete spinal cord injury. J. Neuroeng. Rehabil. 2014, 11, 167. [Google Scholar] [CrossRef] [PubMed]
- Gusinde, J.; Pauser, J.; Swoboda, B.; Gelse, K.; Carl, H. Foot loading characteristics of different graduations of partial weight bearing. Int. J. Rehabil. Res. 2011, 34, 261–264. [Google Scholar] [CrossRef] [PubMed]
- González, I.; Fontecha, J.; Hervás, R.; Bravo, J. An Ambulatory system for gait monitoring based on wireless sensorized insoles. Sensors 2015, 15, 16589–16613. [Google Scholar] [CrossRef] [PubMed]
- Wafai, L.; Zayegh, A.; Woulfe, J.; Aziz, S.M.; Begg, R. Identification of foot pathologies based on plantar pressure asymmetry. Sensors 2015, 15, 20392–20408. [Google Scholar] [CrossRef] [PubMed]
- Chamorro-Moriana, G. Sistema de Medición de Cargas en Bastones de Antebrazo. Spanish Patent P200901942, 2 October 2009. (In Spanish)[Google Scholar]
- Chamorro-Moriana, G.; Rebollo-Roldán, J.; Jiménez-Rejano, J.J.; Chillón-Martínez, R.; Suárez-Serrano, C. Design and validation of GCH System 1.0 which measures the weight-bearing exerted on forearm crutches during aided gait. Gait Posture 2013, 37, 564–569. [Google Scholar] [CrossRef] [PubMed]
- Sardini, E.; Serpelloni, M.; Lancini, M. Wireless instrumented crutches for force and movement measurements for gait monitoring. IEEE Trans. Instrum. Meas. 2015, 64, 3369–3379. [Google Scholar] [CrossRef]
- Tveit, M.; Karrholm, J. Low effectiveness of prescribed partial weight bearing. Continuous recording of vertical loads using a new pressure-sensitive insole. J. Rehabil. Med. 2001, 33, 42–46. [Google Scholar] [PubMed]
- Fu, M.C.; DeLuke, L.; Buerba, R.A.; Fan, R.E.; Zheng, Y.J.; Leslie, M.P.; Baumgaertner, M.R.; Grauer, J.N. Haptic biofeedback for improving compliance with lower-extremity partial weight bearing. Orthopedics 2014, 37, e993–e998. [Google Scholar] [CrossRef] [PubMed]
- Clark, B.C.; Manini, T.M.; Ordway, N.R.; Ploutz-Snyder, L.L. Leg muscle activity during walking with assistive devices at varying levels of weight bearing. Arch. Phys. Med. Rehabil. 2004, 85, 1555–1560. [Google Scholar] [CrossRef] [PubMed]
- Shenzhen Exact Sensor Instrument Co., Ltd. Available online: http://shenzhen-exact.en.ywsp.com/ (accessed on 11 May 2016).
- Friedman, L. SimpliciTI: Simple Modular RF Network Specification; Texas Instruments, Inc.: San Diego, CA, USA, 2009. [Google Scholar]
- Richardson, J.K.; Thies, S.; Ashton-Miller, J.A. An exploration of step time variability on smooth and irregular surfaces in older persons with neuropathy. Clin. Biomech. 2008, 23, 349–356. [Google Scholar] [CrossRef] [PubMed]
- Chaiwatpongsakorn, C.; Lu, M.; Keener, T.C.; Khang, S.J. The deployment of carbon monoxide wireless sensor network (CO-WSN) for ambient air monitoring. Int. J. Environ. Res. Public Health 2014, 11, 6246–6264. [Google Scholar] [CrossRef] [PubMed]
- Chamorro-Moriana, G. Sistema de Medición de Cargas en Bastones de Antebrazo. International Patent PCT/ES2011/000340, 2 February 2012. [Google Scholar]
- D’Anna, C.; Schmid, M.; Bibbo, D.; Bertollo, M.; Comani, S.; Conforto, S. The Effect of continuous and discretized presentations of concurrent augmented visual biofeedback on postural control in quiet stance. PLoS ONE 2015, 10, e0132711. [Google Scholar] [CrossRef] [PubMed]
- Hol, A.; van Grinsven, S.; Lucas, C.; van Susante, J.; van Loon, C. Partial versus unrestricted weight bearing after an uncemented femoral stem in total hip arthroplasty: Recommendation of a concise rehabilitation protocol from a systematic review of the literature. Arch. Orthop. Trauma Surg. 2010, 130, 547–555. [Google Scholar] [CrossRef] [PubMed]
- Audette, I.; Dumas, J.P.; Cote, J.N.; De Serres, S.J. Validity and between-day reliability of the cervical range of motion (CROM) device. J. Orthop. Sports Phys. Ther. 2010, 40, 318–323. [Google Scholar] [CrossRef] [PubMed]
- Ruiz-Morales, A.; Morillo-Zárate, L.E. Epidemiología Clínica: Investigación Clínica Aplicada; Editorial Médica Panamericana: Bogotá, Columbia, 2006. [Google Scholar]
- Martínez-González, M.A.; Sánchez-Villegas, A.; Faulin-Fajardo, J. Bioestadística Amigable, 2nd ed.; Díaz De Santos: Madrid, Spain, 2008. [Google Scholar]
- Osaki, Y.; Kunin, M.; Cohen, B.; Raphan, T. Relative contribution of walking velocity and stepping frequency to the neural control of locomotion. Exp. Brain Res. 2008, 185, 121–135. [Google Scholar] [CrossRef] [PubMed]
- Jones, A.; Alves, A.; de Oliveira, L.; Saad, M.; Natour, J. Energy expenditure during cane-assisted gait in patients with knee osteoarthritis. Clinics 2008, 63, 197–200. [Google Scholar] [CrossRef] [PubMed]
- Altman, D.G. Practical Statistics for Medical Research, 1st ed.; Chapman and Hall: London, UK, 1991. [Google Scholar]
- McGraw, K.O.; Wong, S.P. Forming inferences about some intraclass correlation coefficients. Psychol. Methods 1996, 1, 30–46. [Google Scholar] [CrossRef]
- Buffa, R.; Mereu, E.; Lussu, P.; Succa, V.; Pisanu, T.; Buffa, F.; Marini, E. A new, effective and low-cost three-dimensional approach for the estimation of upper-limb volume. Sensors 2015, 15, 12342–12357. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Greenland, S. Introduction to Regression Models, 2nd ed.; Lippincott-Raven: Philadelphia, PA, USA, 1998; pp. 359–399. [Google Scholar]
- Dagnino, S.J. Regresión lineal. Rev. Chil. Anest. 2014, 43, 143–149. [Google Scholar]
- Hausdorff, J.M.; Ladin, Z.; Wei, J.Y. Footswitch system for measurement of the temporal parameters of gait. J. Biomech. 1995, 28, 347–351. [Google Scholar] [CrossRef]
- Bateni, H.; Maki, B.E. Assistive devices for balance and mobility: Benefits, demands, and adverse consequences. Arch. Phys. Med. Rehabil. 2005, 86, 134–145. [Google Scholar] [CrossRef] [PubMed]
- Terjesen, T.; Lofterod, B.; Skaaret, I. Gait improvement surgery in ambulatory children with diplegic cerebral palsy. Acta Orthop. 2015, 86, 511–517. [Google Scholar] [CrossRef] [PubMed]
- Isakov, E. Gait rehabilitation: A new biofeedback device for monitoring and enhancing weight-bearing over the affected lower limb. Eura Medicophys. 2007, 43, 21–26. [Google Scholar] [PubMed]
- Kaplan, Y. The use of a new biofeedback insole weight-bearing measuring device in the assessment and rehabilitation of soccer players: A case study review. J. Sport Sci. Med. 2007, Suppl 10, S30–S34. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GCH 1.0. | GCH 2.0. |
|---|---|
| Distributed system | Compact system |
| Patients have to carry an electronic box place on their belts. | Electronic component inside the crutch tube. |
| External cables are necessary to connect the sensors to control box placed on the patient´s belt. | Internal cables. Patients do not have any contact with cables. |
| External electronic components. | Internal miniature electronic components/ surface mount device (SMD). |
| Weight: 1150 g. | Weight: 720 g. |
| Non standard battery/rechargeable/700 mA. | Standard battery/AA/rechargeable/6000 mA. |
| Zero is not automatic. | Offset process is automatically activated. |
| Only for a patient walking with one or two crutches. | Several patients can use the System simultaneously, with one or two crutches. |
| Discretized biofeedback. System informs if the load is wrong only with a binary signal. | The physiotherapist/patient can choose between continuous or discretized visual biofeedback. In the continuous mode, the patient receives information throughout the whole process [23]. |
| Moteview 2.0. Generic software that shows: amount of load and a simple linear chart. This is visualized by the researcher. It is not useful for the patient. | GCH Control Software 1.0.: Specific program to control assisted gait. The load could be shown in percentages of the patient´s weight-bearing (data of clinic interest). It offers specific charts and data for researchers, physiotherapists and patients. It is adaptable to the kind of patient. (Figure 2). |
| No database. | Patients’ clinical database. |
| Data sampling frequency ≤10 Hz | Data sampling frequency ≤80 Hz |
| The portable system. The physiotherapist selects the ideal load without percentages. It does not allow for comparisons and research. | The portable system (watch). The physiotherapists or researchers select the ideal load or the percentage of the patient’s weight-bearing (data of clinic interest). |
| Load | N | Mean* | SD | Minimum | Maximum | Percentiles | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| 25 | 50 | 75 | ||||||||
| Platform | Right crutch | 10 | 90 | 7.33 | 4.00 | 2.24 | 20.09 | 4.38 | 6.37 | 9.00 |
| 25 | 90 | 16.03 | 4.86 | 9.07 | 29.89 | 12.44 | 15.04 | 19.00 | ||
| 50 | 90 | 25.66 | 8.45 | 12.64 | 50.60 | 19.33 | 24.23 | 30.63 | ||
| Left crutch | 10 | 90 | 7.76 | 4.30 | 2.13 | 23.15 | 4.58 | 6.73 | 9.33 | |
| 25 | 90 | 15.79 | 5.07 | 6.72 | 30.50 | 12.64 | 14.89 | 17.42 | ||
| 50 | 90 | 26.48 | 8.28 | 9.58 | 46.52 | 20.12 | 25.45 | 32.59 | ||
| GCH | Right crutch | 10 | 90 | 7.31 | 3.97 | 2.20 | 19.65 | 4.40 | 6.30 | 9.07 |
| 25 | 90 | 15.93 | 4.82 | 8.99 | 29.73 | 12.42 | 14.95 | 18.90 | ||
| 50 | 90 | 25.46 | 8.38 | 12.70 | 50.06 | 19.02 | 24.38 | 30.40 | ||
| Left crutch | 10 | 90 | 7.73 | 4.26 | 2.14 | 22.92 | 4.57 | 6.76 | 9.25 | |
| 25 | 90 | 15.69 | 5.02 | 6.70 | 30.19 | 12.56 | 14.77 | 17.32 | ||
| 50 | 90 | 26.27 | 8.22 | 9.58 | 46.02 | 19.88 | 25.23 | 32.17 | ||
| Load | Intra-Class Correlation | Confidence Interval (95%) | p-Value | ||
|---|---|---|---|---|---|
| Lower Bound | Upper Bound | ||||
| Right crutch | 10 | 0.99964 | 0.99946 | 0.99976 | <0.001 |
| 25 | 0.99937 | 0.99904 | 0.99958 | <0.001 | |
| 50 | 0.99985 | 0.99977 | 0.99990 | <0.001 | |
| Left crutch | 10 | 0.99990 | 0.99985 | 0.99994 | <0.001 |
| 25 | 0.99993 | 0.99990 | 0.99996 | <0.001 | |
| 50 | 0.99995 | 0.99992 | 0.99996 | <0.001 | |
| Global | 0.99992 | 0.99990 | 0.99993 | <0.001 | |
| Requested Load | Tolerance Level | n | % |
|---|---|---|---|
| 10% | Tolerable | 178 | 98.9 |
| Not tolerable | 2 | 1.1 | |
| 25% | Tolerable | 173 | 96.1 |
| Not tolerable | 7 | 3.9 | |
| 50% | Tolerable | 169 | 93.9 |
| Not tolerable | 11 | 6.1 | |
| Global | Tolerable | 520 | 96.3 |
| Not tolerable | 20 | 3.7 |
| Right Crutch | Left Crutch | Global | |||||
|---|---|---|---|---|---|---|---|
| Load | 10 | 25 | 50 | 10 | 25 | 50 | |
| Constant | −0.072 | −0.023 | −0.016 | −0.369 | −0.045 | 0.009 | −0.383 |
| Constant Lower Bound | −0.167 | −0.198 | −0.146 | −0.598 | −0.093 | −0.066 | −0.519 |
| Constant Upper Bound | 0.024 | 0.153 | 0.115 | −0.140 | 0.003 | 0.083 | −0.247 |
| Constant p-value | 0.138 | 0.799 | 0.809 | 0.002 | 0.067 | 0.813 | <0.001 |
| Slope | 1.014 | 1.008 | 1.009 | 1.062 | 1.009 | 1.008 | 1.036 |
| Slope Lower Bound | 1.003 | 0.997 | 1.004 | 1.036 | 1.006 | 1.005 | 1.029 |
| Slope Upper Bound | 1.026 | 1.018 | 1.013 | 1.089 | 1.012 | 1.010 | 1.044 |
| Slope p-value | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 |
| Adjusted Squared R | 0.997 | 0.998 | 0.999 | 0.986 | >0.999 | >0.999 | 0.993 |
| Regression p-value | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chamorro-Moriana, G.; Sevillano, J.L.; Ridao-Fernández, C. A Compact Forearm Crutch Based on Force Sensors for Aided Gait: Reliability and Validity. Sensors 2016, 16, 925. https://doi.org/10.3390/s16060925
Chamorro-Moriana G, Sevillano JL, Ridao-Fernández C. A Compact Forearm Crutch Based on Force Sensors for Aided Gait: Reliability and Validity. Sensors. 2016; 16(6):925. https://doi.org/10.3390/s16060925
Chicago/Turabian StyleChamorro-Moriana, Gema, José Luis Sevillano, and Carmen Ridao-Fernández. 2016. "A Compact Forearm Crutch Based on Force Sensors for Aided Gait: Reliability and Validity" Sensors 16, no. 6: 925. https://doi.org/10.3390/s16060925
APA StyleChamorro-Moriana, G., Sevillano, J. L., & Ridao-Fernández, C. (2016). A Compact Forearm Crutch Based on Force Sensors for Aided Gait: Reliability and Validity. Sensors, 16(6), 925. https://doi.org/10.3390/s16060925