
Design and Analysis of a New Hair Sensor for Multi-Physical Signal Measurement

Abstract
:1. Introduction
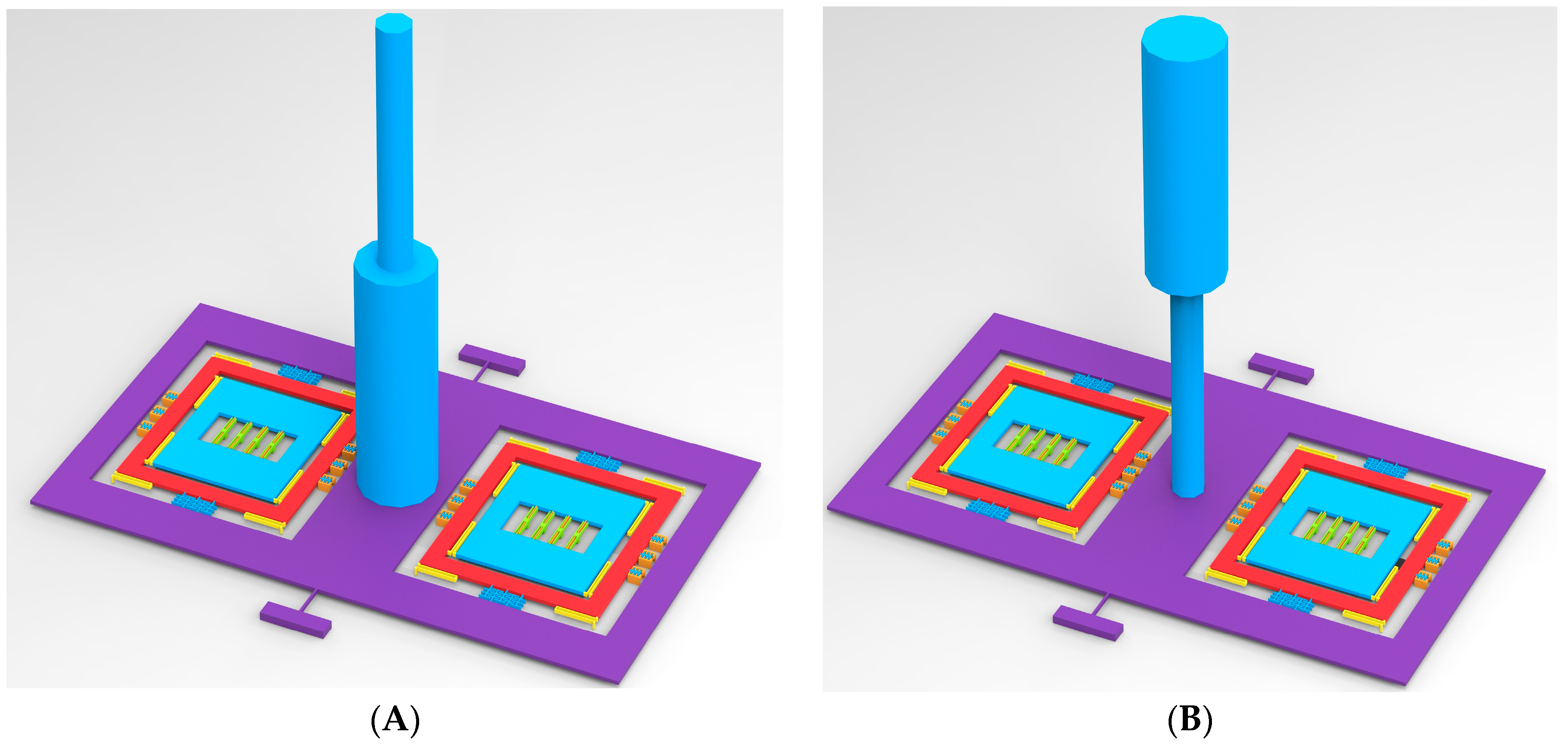
2. Device Description and Design
2.1. Air Flow Measurement
2.2. Resonant Signal Transducer
2.3. Acceleration Measurement
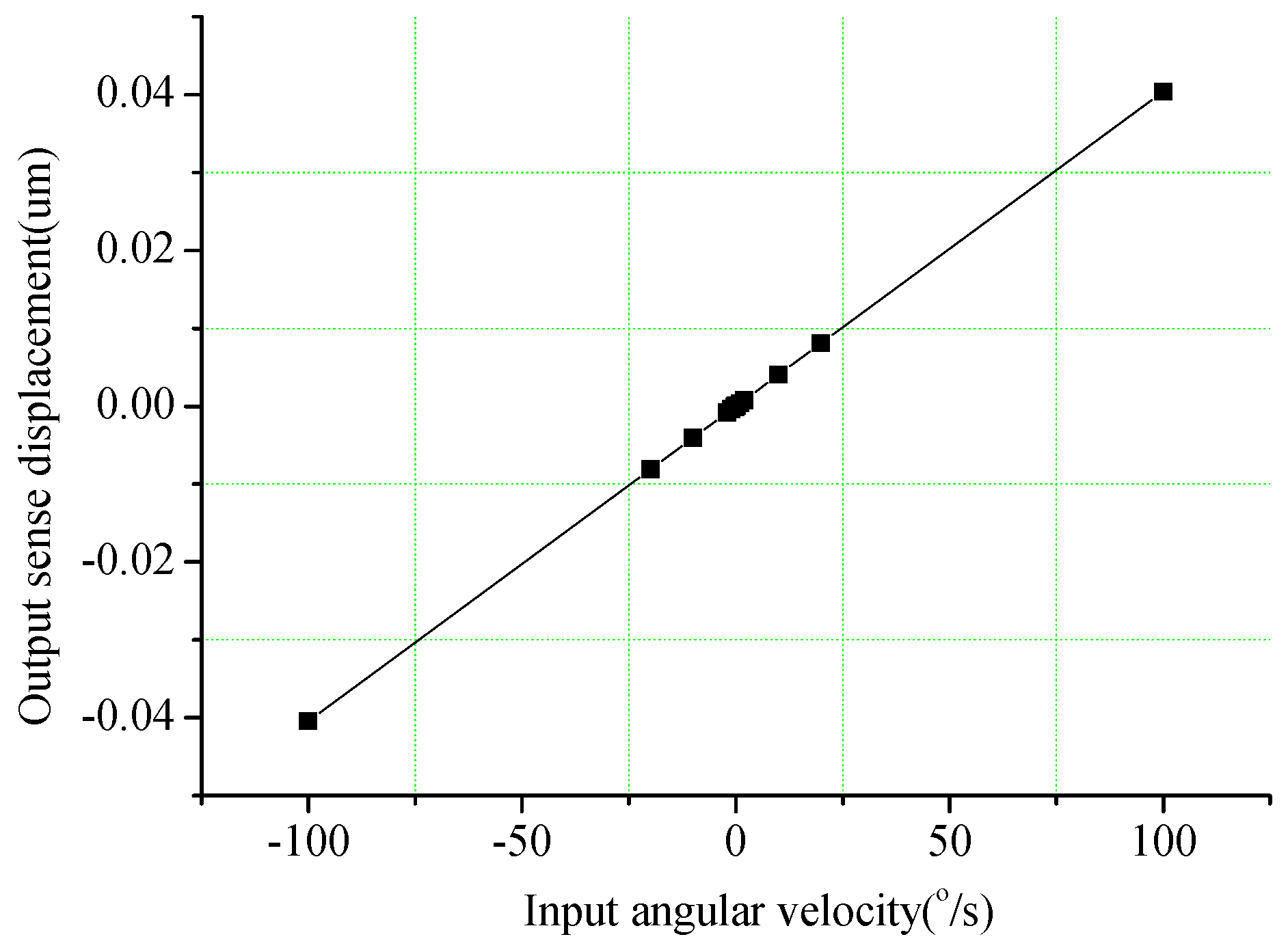
2.4. Angular Velocity Measurement
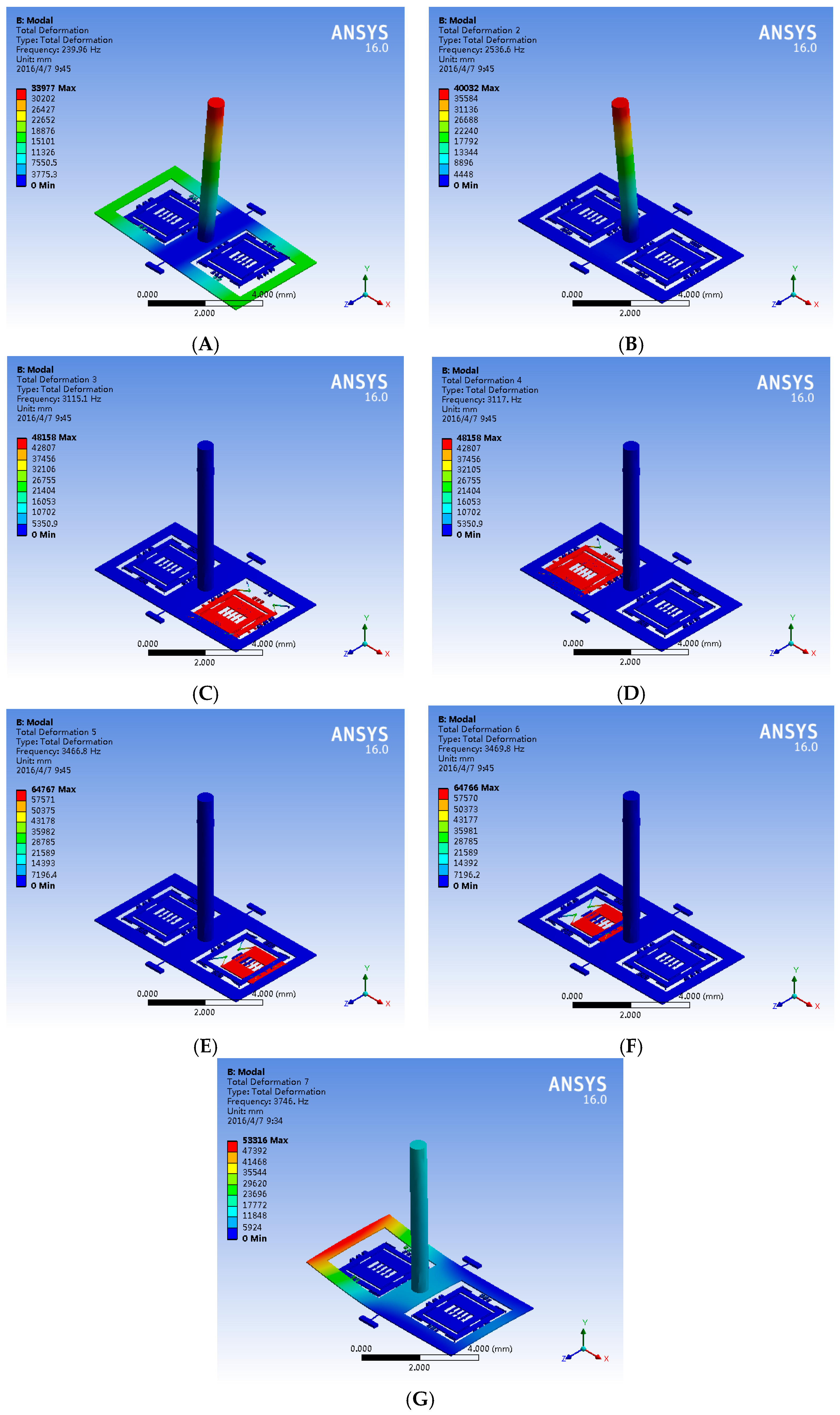
3. Modal Simulation and Optimization
4. Performance Analysis
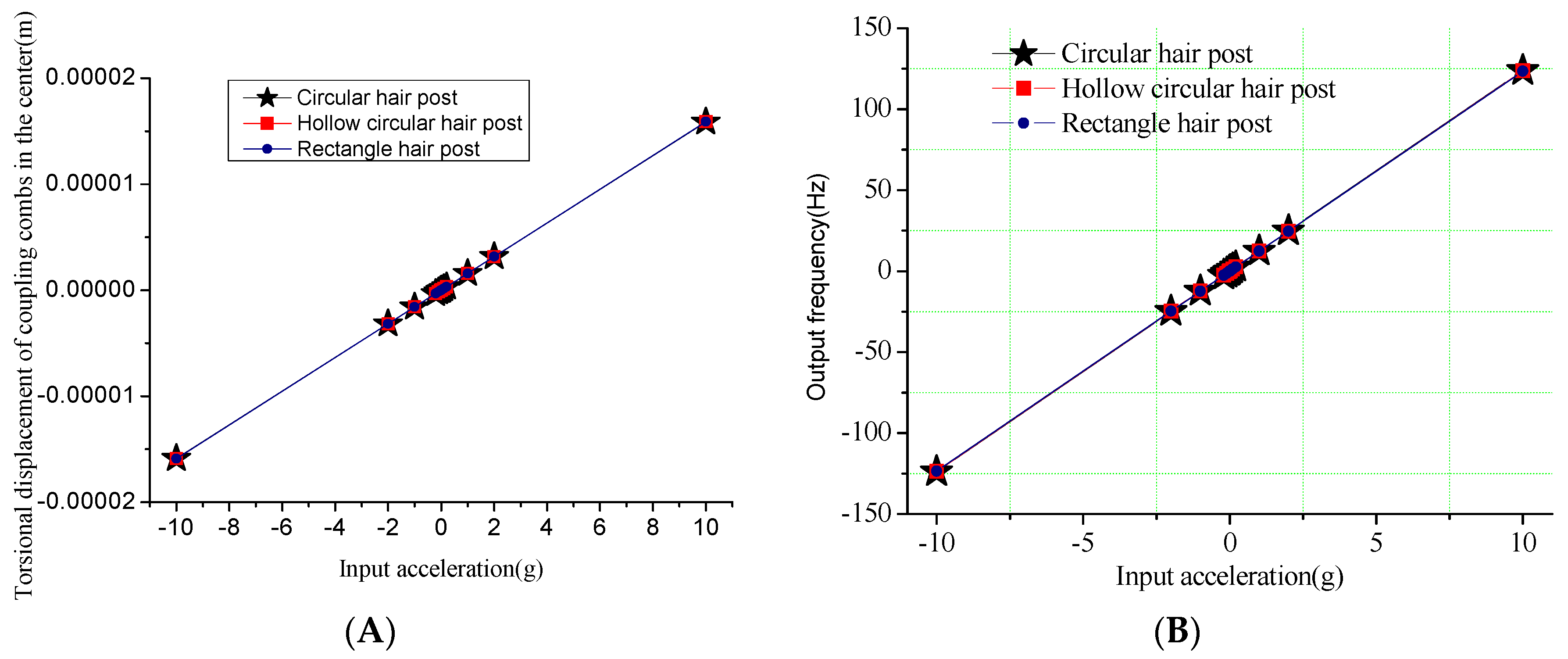
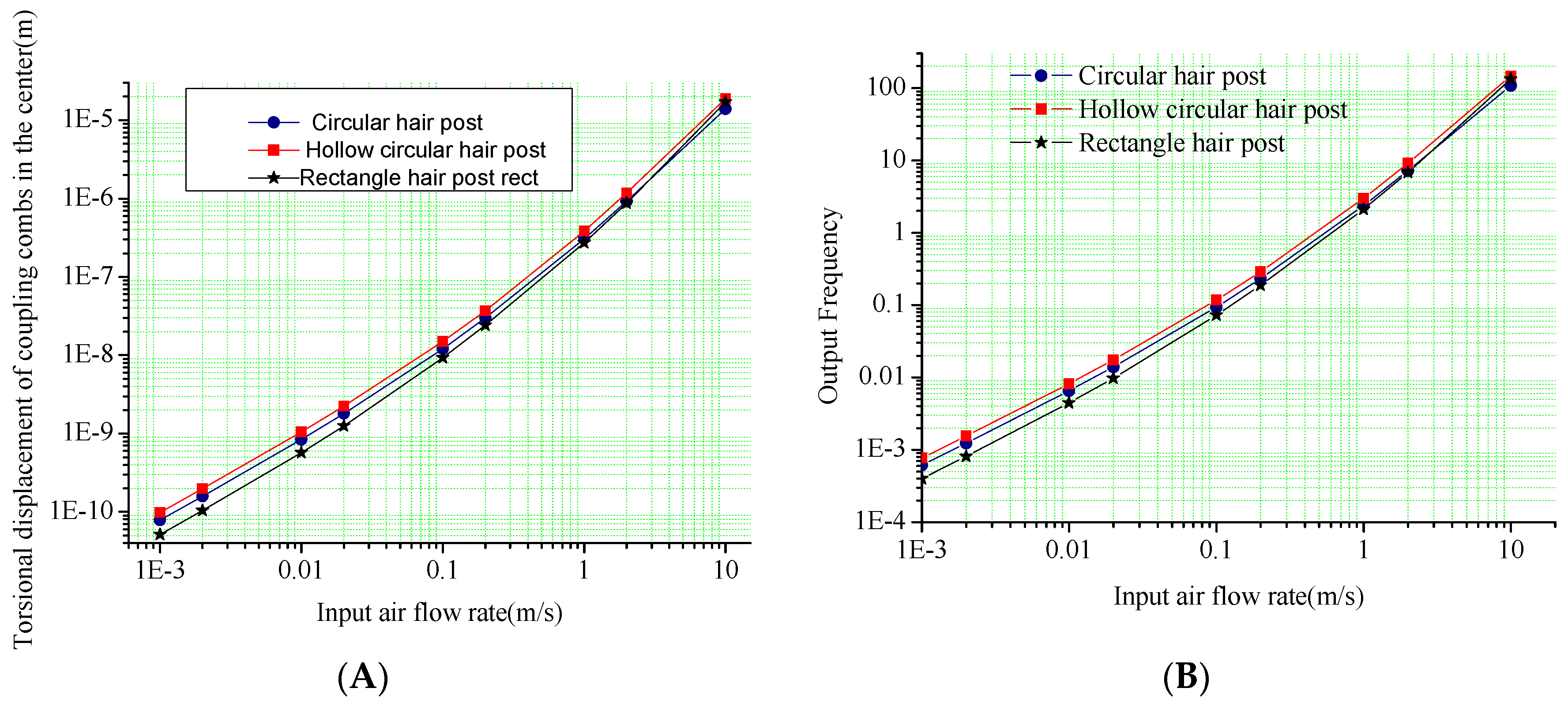
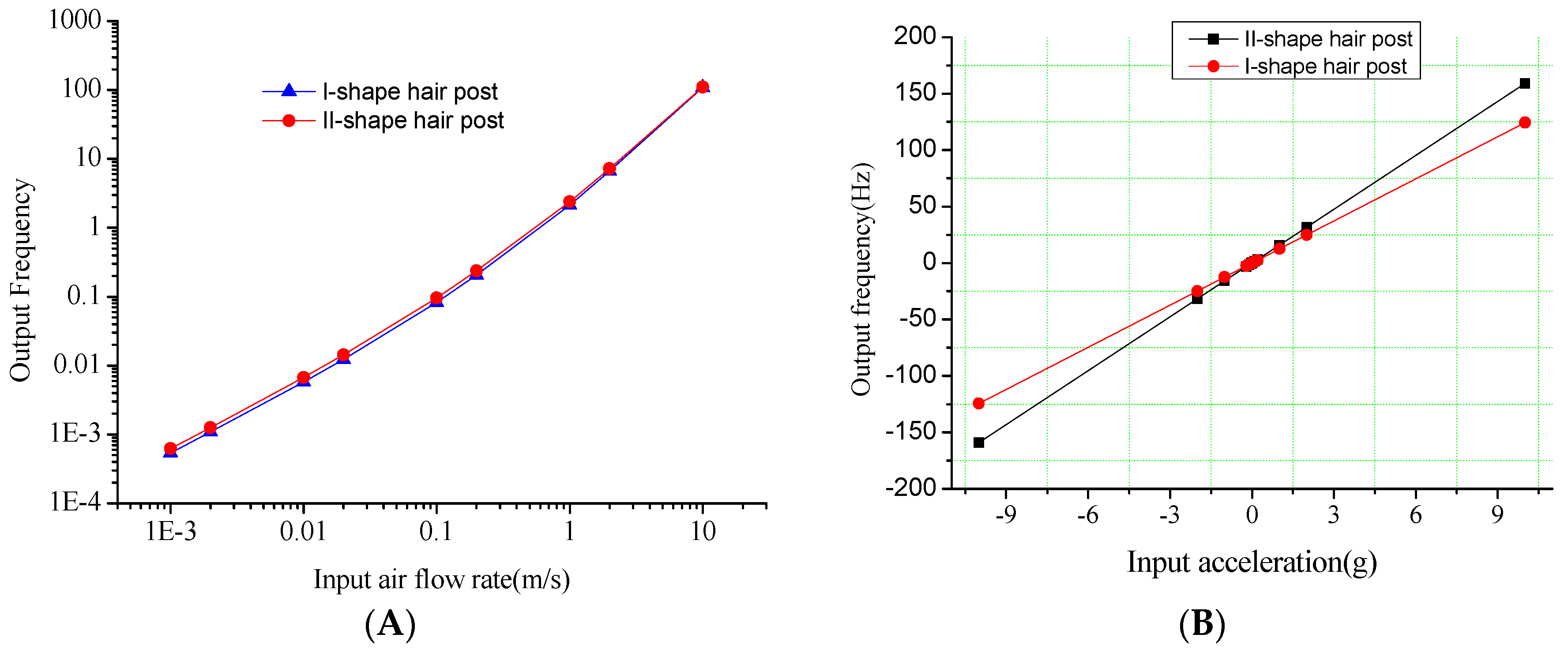
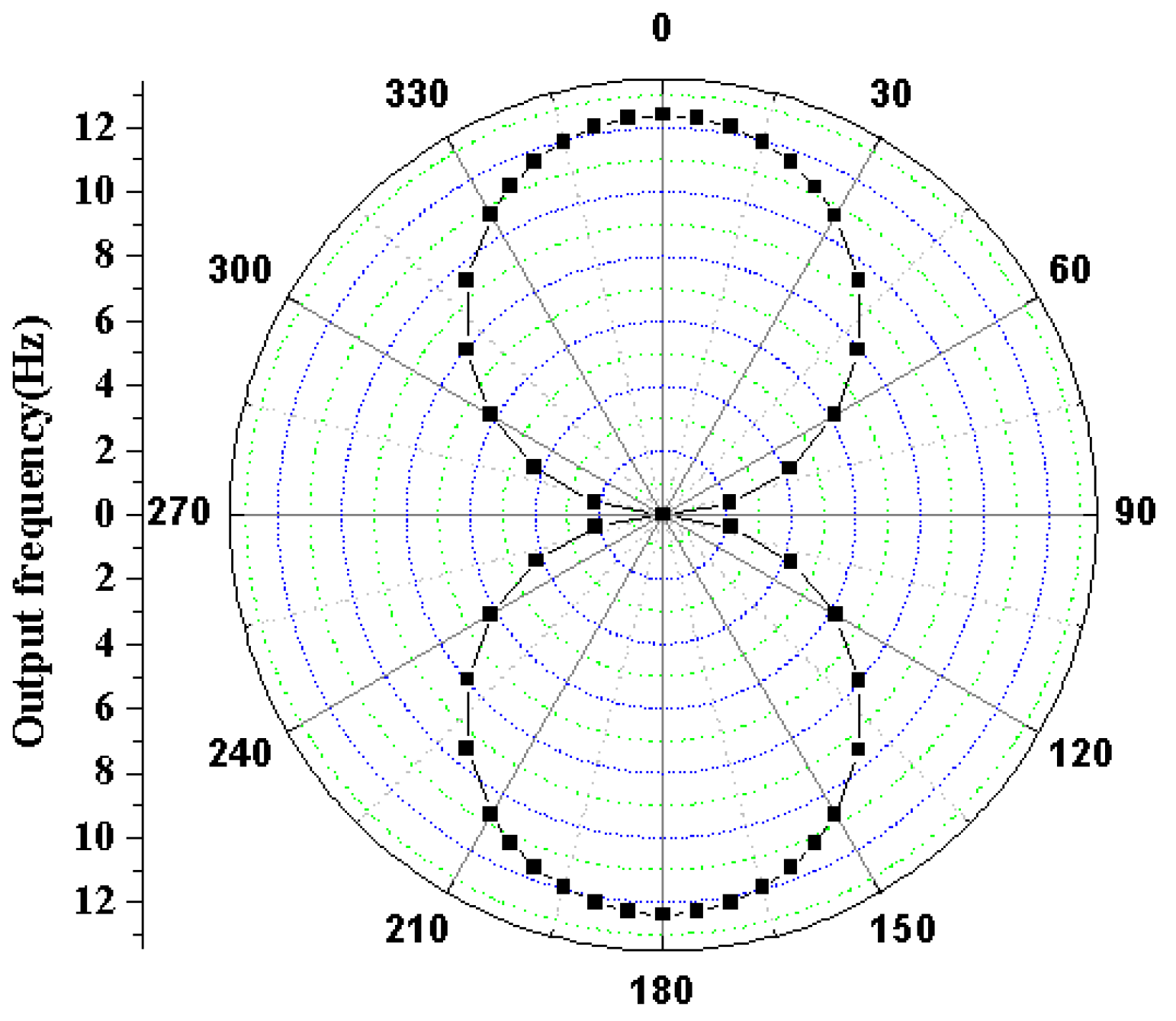
4.1. The Input-Output Characteristics
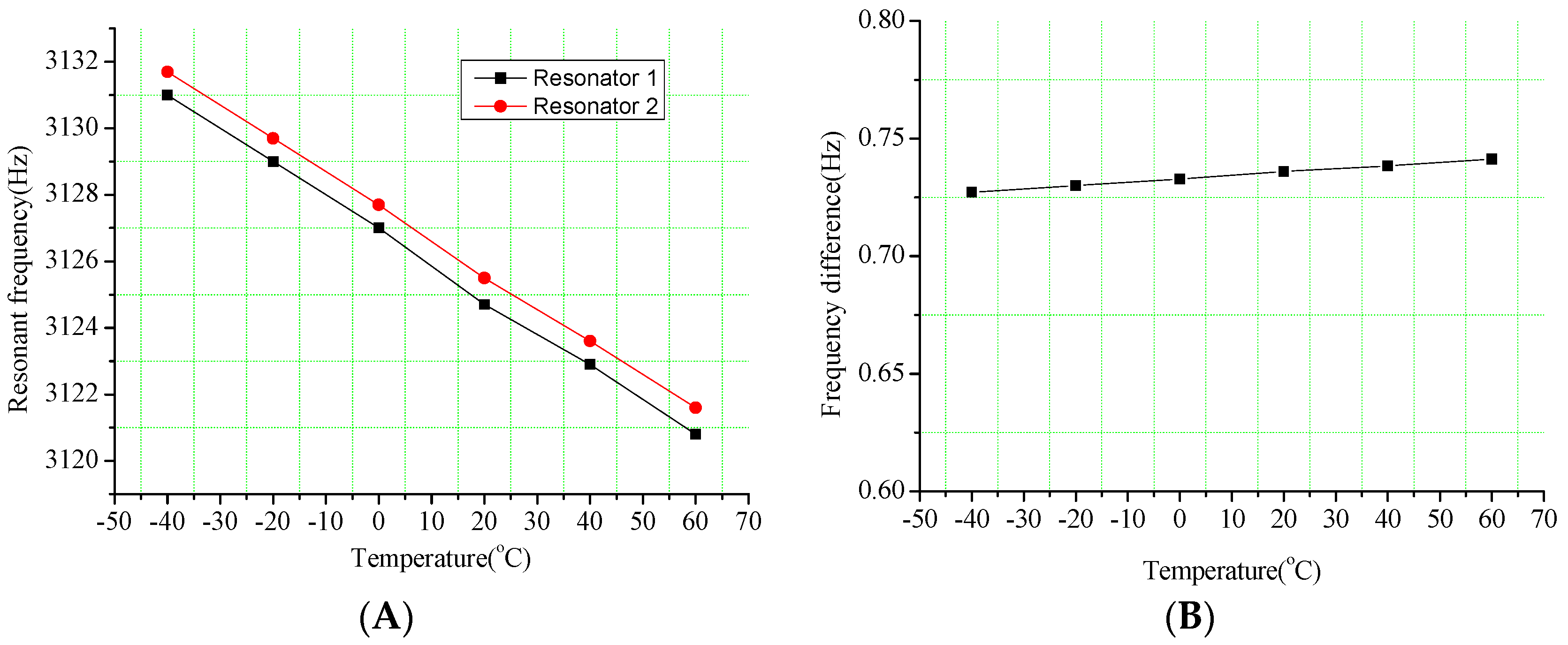
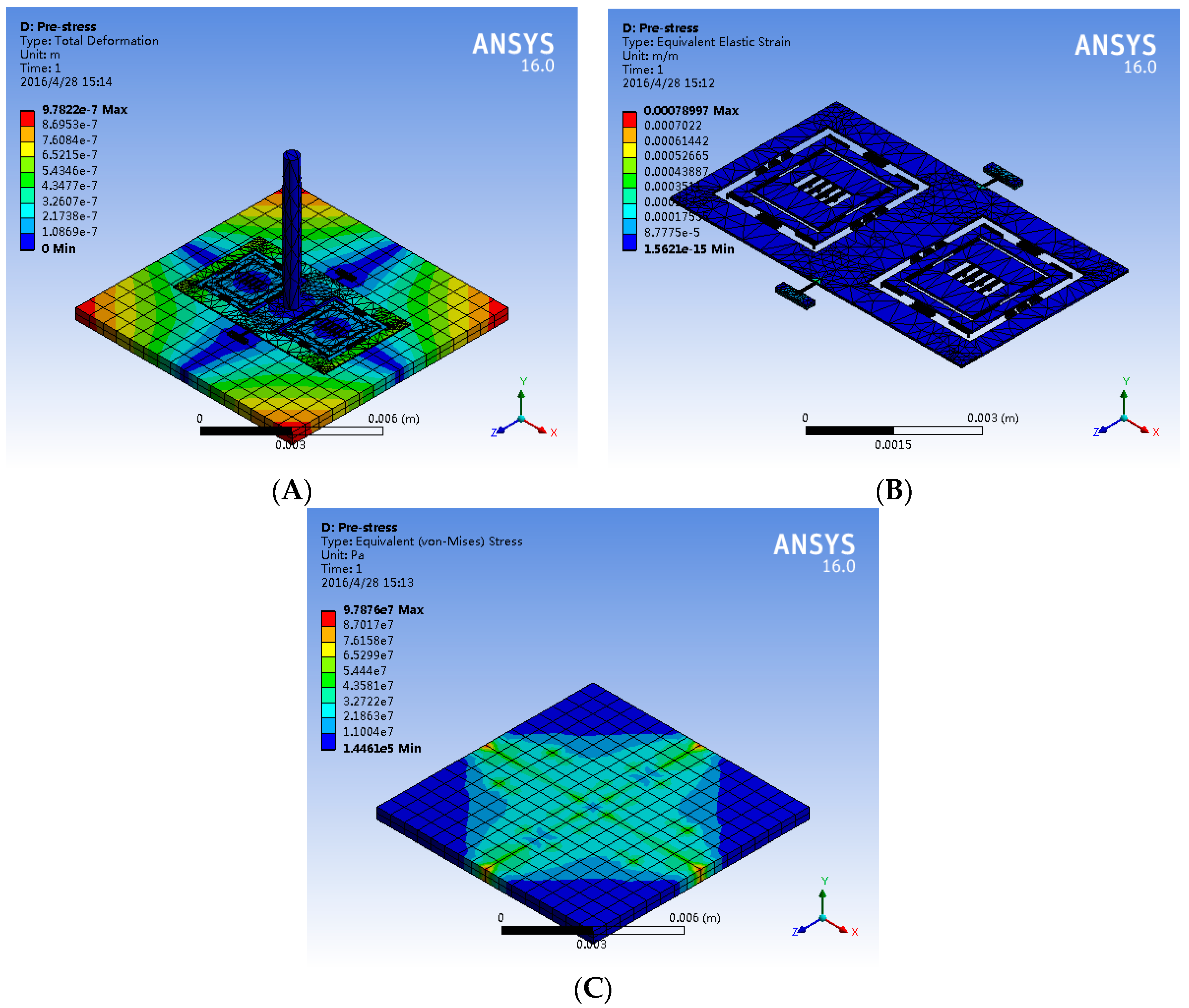
4.2. Thermal Analysis
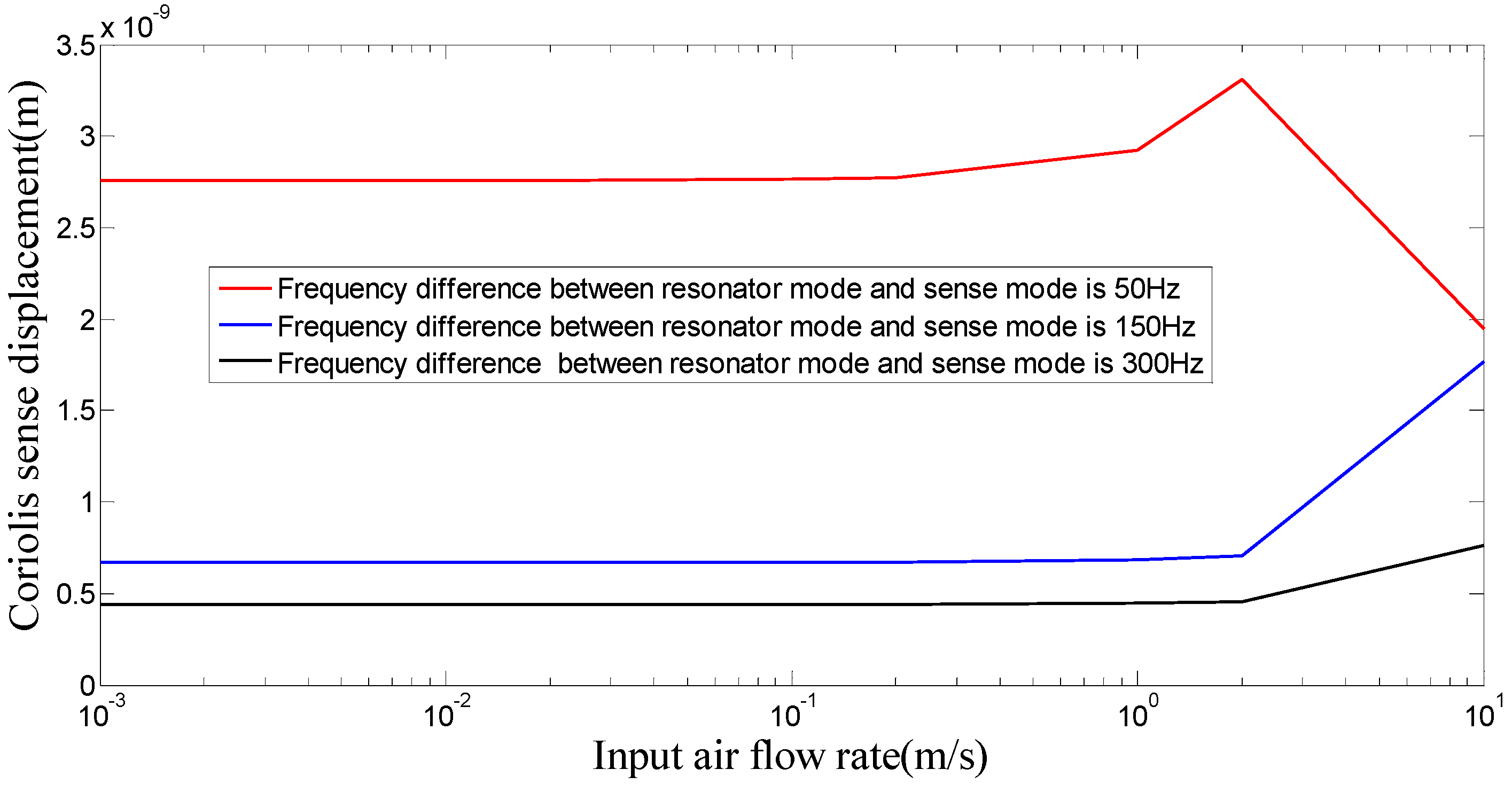
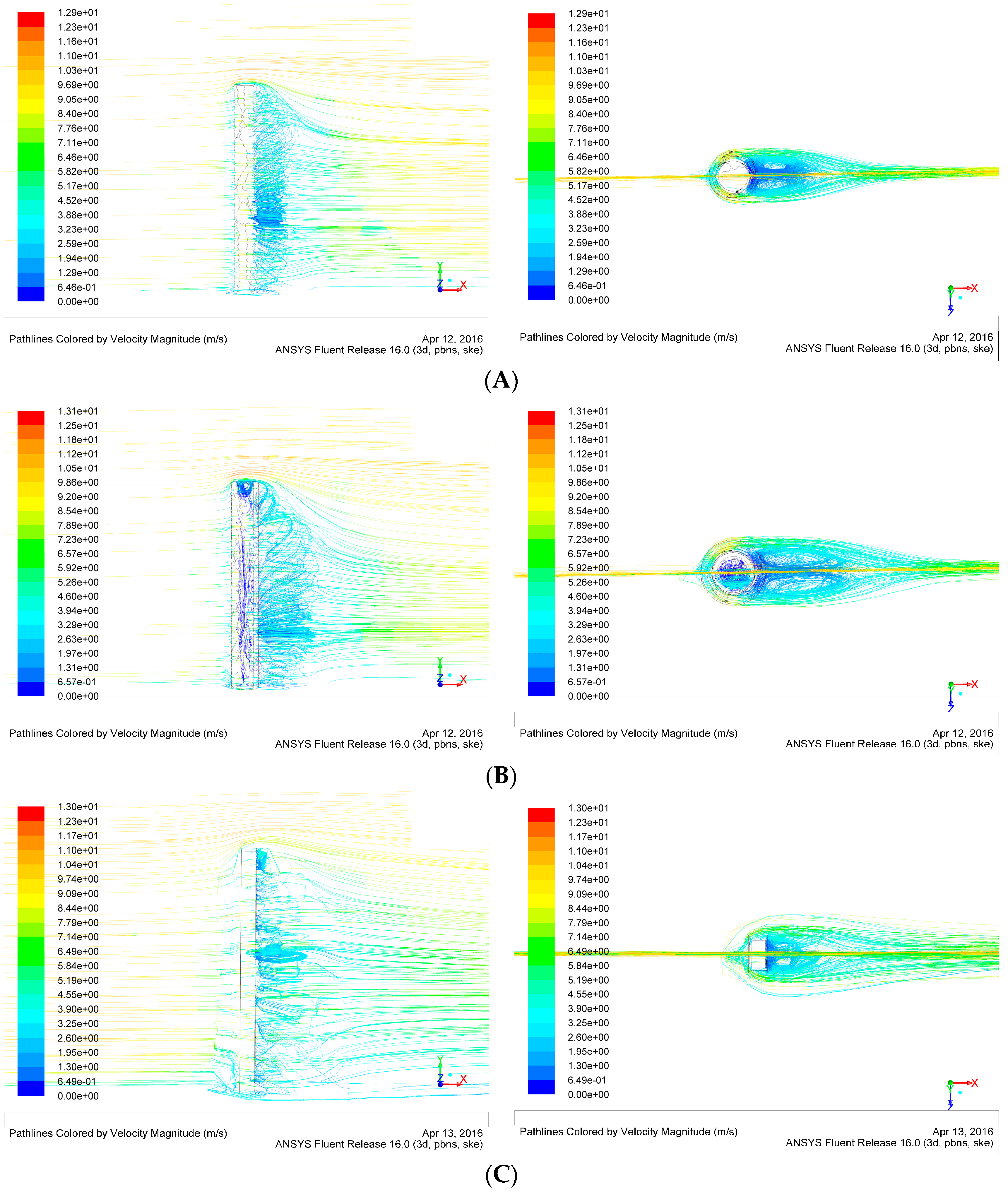
4.3. Air Flow Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Tao, J.; Yu, X. Hair flow sensors: From bio-inspiration to bio-mimicking—A review. Smart Mater. Struct. 2012, 21, 113001–113023. [Google Scholar] [CrossRef]
- Rizzi, F.; Qualtieri, A.; Dattoma, T.; Epifani, G.; de Vittorio, M. Biomimetics of underwater hair cell sensing. Microelectron. Eng. 2015, 132, 90–97. [Google Scholar] [CrossRef]
- Ngo, T.-D. Biomimetic Technologies: Principles and Applications; Elsevier Science & Technology: Cambridge, UK, 2015; pp. 1–394. [Google Scholar]
- Sadeghi, M.-M.; Peterson, R.-L.; Najafi, K. Hair-based sensors for micro-autonomous systems. In Proceedings of the SPIE on Micro- and Nanotechnology Sensors, Systems, and Applications IV, Baltimore, MD, USA, 3 May 2012; Volume 8373.
- Najafi, K. Biomimetic Hair Sensors: Utilizing the Third Dimension. In Proceedings of the 2012 IEEE Sensors, Taipei, Taiwan, 28–31 October 2012; pp. 1–4.
- Droogendijk, H.; Bruinink, C.-M.; Sanders, R.-G.-P. Improving the performance of biomimetic hair-flow sensors by electrostatic spring softening. J. Micromech. Microeng. 2012, 22, 065026. [Google Scholar] [CrossRef]
- Dagamseh, A.-M.-K.; Bruinink, C.-M.; Wiegerink, R.-J. Interfacing of differential capacitive biomimetic hair flow-sensors for optimal sensitivity. J. Micromech. Microeng. 2013, 23, 035010. [Google Scholar] [CrossRef]
- Fan, Z.; Chen, J.; Zou, J.; Bulle, D.; Liu, C. Design and fabrication of artificial lateral line flow sensors. J. Micromech. Microeng. 2002, 12, 655–661. [Google Scholar] [CrossRef]
- Chen, N.; Tucker, C.; Engel, J.; Yang, Y.; Pandya, S.; Liu, C. Design and characterization of artificial haircell sensor for flow sensing with ultrahigh velocity and angular sensitivity. J. Microelectromech. Syst. 2007, 16, 999–1014. [Google Scholar] [CrossRef]
- Sakaguchi, D.-S.; Murphey, R.-K. The equilibrium detecting system of the cricket: Physiology and morphology of an identified interneuron. J. Comp. Physiol. 1983, 150, 141–152. [Google Scholar] [CrossRef]
- Droogendijk, H.; Boer, M.-J.; Sanders, R.-G.-P.; Krijnen, G.-J.-M. Design, fabrication and characterisation of a biomimetic accelerometer inspired by the cricket’s clavate hair. In Proceedings of the IEEE Sensors 2013, Baltimore, MD, USA, 3–6 November 2013; pp. 167–170.
- Tang, Y.; Najafi, K. High Aspect-Ratio Low-Noise Multi-Axis Accelerometers Made from Thick Silicon. In Proceedings of the 2016 IEEE International Symposium on Inertial Sensors and Systems Proceedings, Laguna Beach, CA, USA, 22–25 February 2016; pp. 121–124.
- Smith, G.-L.; Bedair, S.-S.; Schuster, B.-E.; Nothwang, W.-D.; Pulskamp, J.-S.; Meyer, C.-D.; Polcawich, R.-G. Biologically-inspired, haltere, angular-rate sensors for micro-autonomous systems. In Proceedings of the SPIE on Micro- and Nanotechnology Sensors, Systems, and Applications IV, Baltimore, MD, USA, 3 May 2012; Volume 8373.
- Krijnen, G.; Floris, A.; Dijkstra, M.; Lammerink, T.; Wiegerink, R. Biomimetic micromechanical adaptive flow-sensor arrays. In Proceedings of the SPIE on Bioengineered and Bioinspired Systems III, Maspalomas, Gran Canaria, Spain, 2 May 2007; Volume 6592.
- Yang, B.; Wang, X.; Dai, B.; Liu, X. A New Z-axis Resonant Micro-Accelerometer Based on Electrostatic Stiffness. Sensors 2015, 15, 687–702. [Google Scholar] [CrossRef] [PubMed]
- Droogendijk, H. Bio-inspired MEMS Flow and Inertial Sensors. Ph.D. Dissertation, University of Twente, Enschede, The Netherlands, 2014. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value | |
|---|---|---|---|---|
| Length × Width (µm) | Torsional beam | 400 × 25 | B (µm) | 1850 |
| Drive suspension beam | 440 × 10 | lh (µm) | 3000 | |
| Sense suspension beam | 960 × 10 | d1 (µm) | 3 | |
| Torsional frame | 7000 × 4000 | Bias voltage in coupled comb V (V) | 12 | |
| Outer frame | 2100 × 2300 | Torsional stiffness ko (N·m/rad) | 4.56 × 10−5 | |
| Inner frame | 1500 × 1700 | Proof mass of resonator mr (kg) | 4.2 × 10−7 | |
| Diameter × Height (µm) | Hair post | 600 × 6000 | Proof mass of inner frame ms (kg) | 2.34 × 10−7 |
| Coupled comb number n | 242 | Drive stiffness of resonator kr (N/m) | 152.62 | |
| Overlap length of coupled comb L (µm) | 35 | Sense mode stiffness kx (N/m) | 14.69 | |
| Structure thickness H (µm) | 50 | Sense mode Q-factor Qx | 20 | |
| Moment of inertia J (kg·m2) | 2 × 10−11 | Q-factor of resonator Qz | 200 | |
| Viscous damping coefficient b (N·m·s/rad) | 3 × 10−8 | |||
| Material | Silicon | Su-8 Photoresist (Hair Post) |
|---|---|---|
| Density (kg/m3) | 2330 | 1200 |
| Young’s modulus (N/m2) | 1.7 × 1011 | 4.95 × 109 |
| Thermal conductivity (W/(m·K)) | 191 | 0.2 |
| Modal | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| Frequency (Hz) | 240 | 2537 | 3115 | 3117 | 3467 | 3470 | 3746 |
| Circular Hair Post | Hollow Circular Hair Post | Rectangle Hair Post | |
|---|---|---|---|
| Structure Dimension (um) | 600 × 6000 | 800 × 528 × 6000 | 752 × 376 × 6000 |
| diameter × height | outer diameter × Inner diameter × height | Length × width × height | |
| Displacement sensitivity of acceleration (um/g) | 1.587 | 1.591 | 1.591 |
| Frequency sensitivity of acceleration (Hz/g) | 12.35 | 12.37 | 12.38 |
| Displacement sensitivity of air flow rate (um/(m/s)2) | 0.138 | 0.187 | 0.171 |
| Frequency sensitivity of air flow rate (Hz/(m/s)2) | 1.075 | 1.458 | 1.333 |
| I-Shape Hair Post | II-Shape Hair Post | |
|---|---|---|
| Structure Dimension (um) | 400 × 3000 (top) and 900 × 3000 (bottom) | 900 × 3000 (top) and 380 × 3000 (bottom) |
| (diameter × height) | (diameter × height) | |
| Displacement sensitivity of acceleration (um/g) | 1.600 | 2.042 |
| Frequency sensitivity of acceleration (Hz/g) | 12.45 | 15.89 |
| Displacement sensitivity of air flow rate (um/(m/s)2) | 0.140 | 0.139 |
| Frequency sensitivity of air flow rate (Hz/(m/s)2) | 1.09 | 1.08 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, B.; Hu, D.; Wu, L. Design and Analysis of a New Hair Sensor for Multi-Physical Signal Measurement. Sensors 2016, 16, 1056. https://doi.org/10.3390/s16071056
Yang B, Hu D, Wu L. Design and Analysis of a New Hair Sensor for Multi-Physical Signal Measurement. Sensors. 2016; 16(7):1056. https://doi.org/10.3390/s16071056
Chicago/Turabian StyleYang, Bo, Di Hu, and Lei Wu. 2016. "Design and Analysis of a New Hair Sensor for Multi-Physical Signal Measurement" Sensors 16, no. 7: 1056. https://doi.org/10.3390/s16071056
APA StyleYang, B., Hu, D., & Wu, L. (2016). Design and Analysis of a New Hair Sensor for Multi-Physical Signal Measurement. Sensors, 16(7), 1056. https://doi.org/10.3390/s16071056