
Sensor Fusion of Gaussian Mixtures for Ballistic Target Tracking in the Re-Entry Phase


Abstract
:1. Introduction
2. Problem Formulation
2.1. Target Dynamics
2.2. Sensor Configurations and Measurement Model
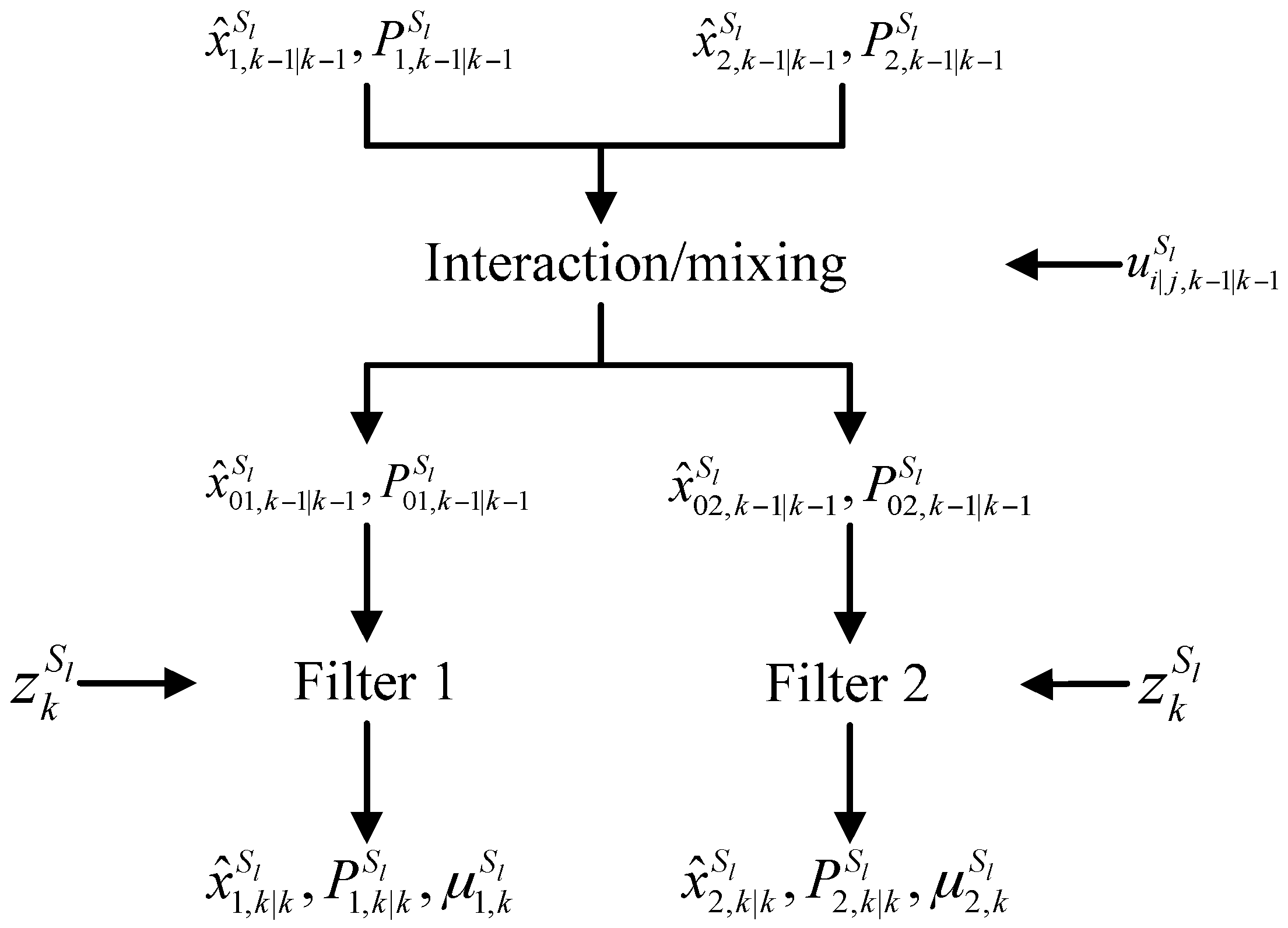
2.3. Local Filter
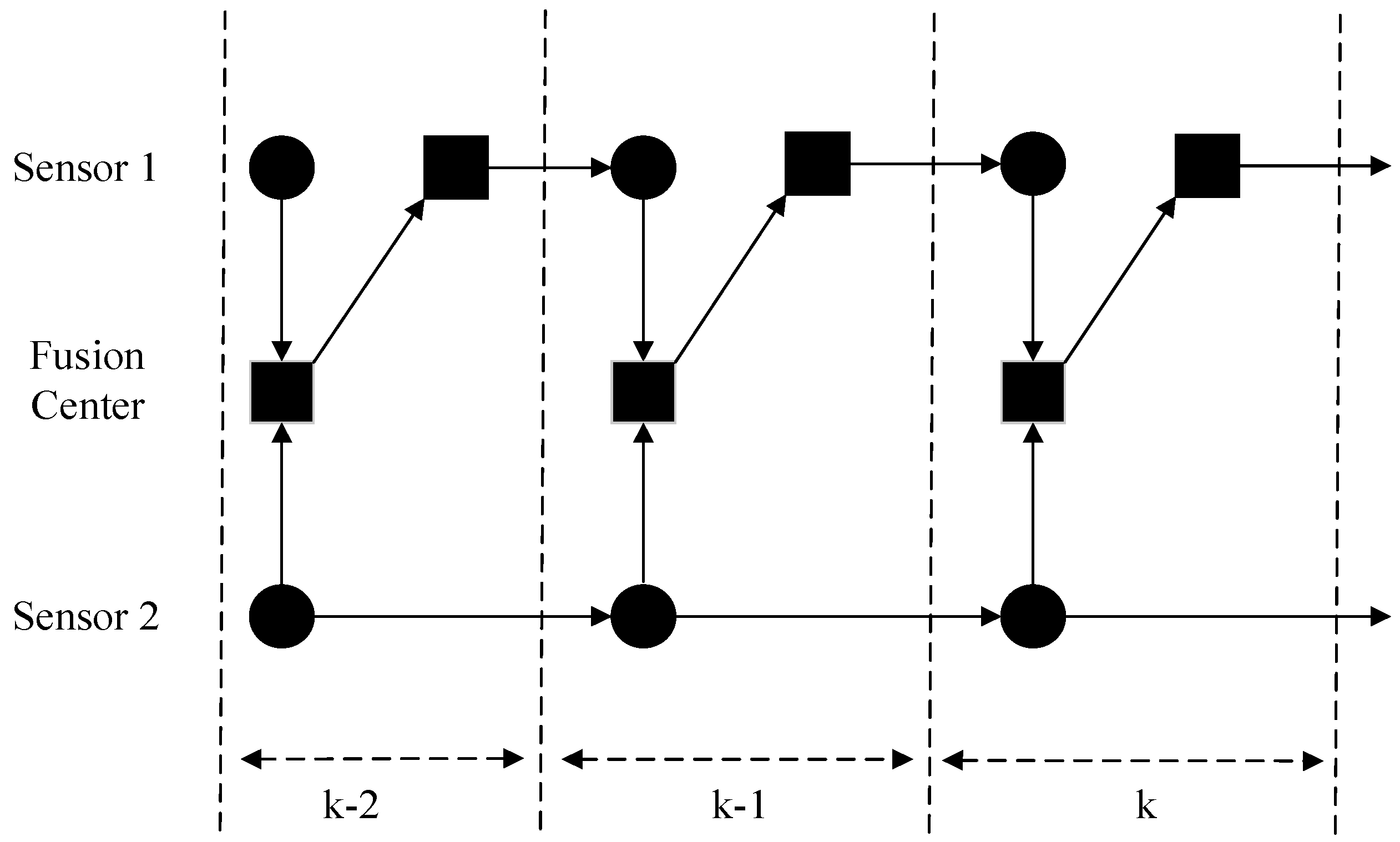
2.4. Fusion Architecture
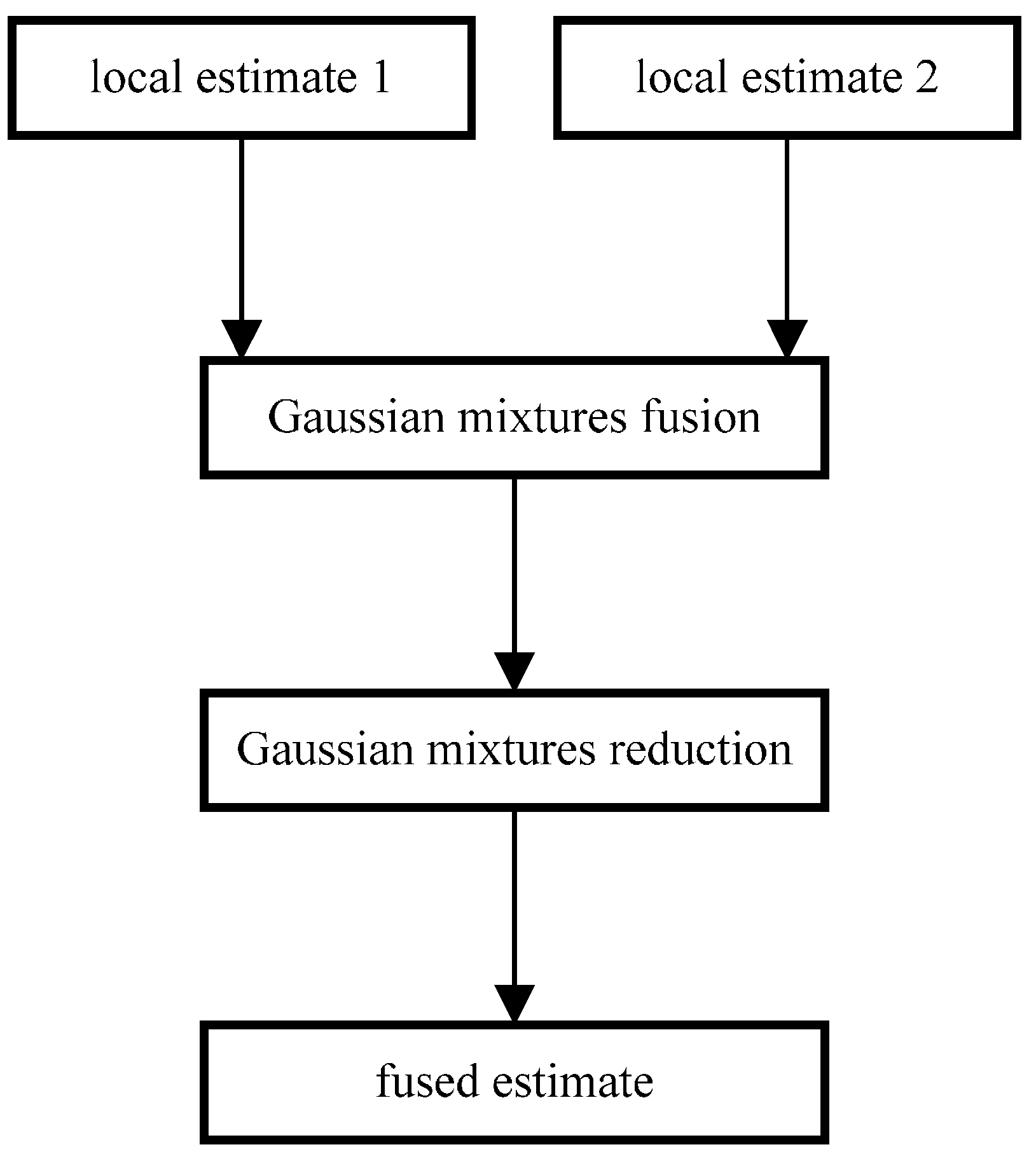
3. Gaussian Mixtures Fusion
3.1. Basic Fusion Process and Redundant Information
3.2. Fusion of Gaussian Mixtures
3.3. Gaussian Mixtures Reduction
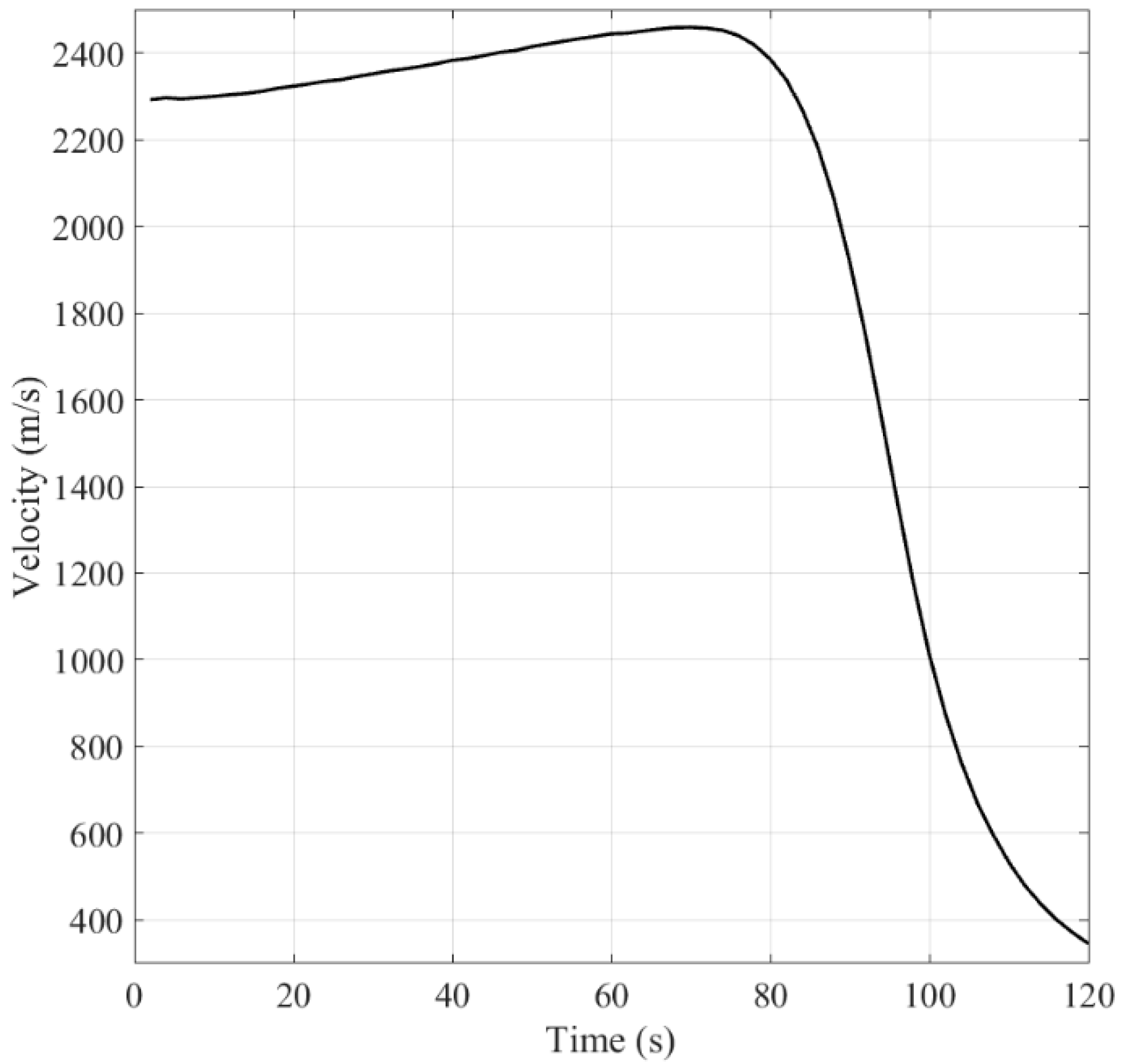
4. Simulation Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
Appendix B
Appendix C
References
- Reali, F.; Palmerini, G.B.; Farina, A.; Graziano, A.; Giompapa, S. Parametric analysis of ballistic target-tracking problem by multiple model approach. IET Radar Sonar Navig. 2013, 7, 459–469. [Google Scholar] [CrossRef]
- Benavoli, A.; Chisci, L.; Farina, A. Tracking of a Ballistic Missile with A-Priori Information. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1000–1016. [Google Scholar] [CrossRef]
- Farina, A.; Ristic, B.; Benvenuti, D. Tracking a ballistic target: comparison of several nonlinear filters. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 854–867. [Google Scholar] [CrossRef]
- Saulson, B.; Chang, K.C. Nonlinear Estimation Comparison for Ballistic Missile Tracking. Opt. Eng. 2004, 43, 1424–1438. [Google Scholar] [CrossRef]
- Dodin, P.; Minvielle, P.; Cadre, J.P.L. Estimating the Ballistic Coefficient of a Re-Entry Vehicle. IET Radar Sonar Navig. 2007, 1, 173–183. [Google Scholar] [CrossRef]
- Zhao, Z.; Chen, H.; Chen, G.; Kwan, C.; Li, X.R. Comparison of Several Ballistic Target Tracking Filters. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; pp. 2197–2202.
- Farina, A.; Benvenuti, D.; Ristic, B. Estimation Accuracy of a Landing Point of a Ballistic Target. In Proceedings of the Fifth International Conference on Information Fusion, Annapolis, MD, USA, 8–11 July 2002; pp. 2–9.
- Ristic, B.; Farina, A.; Benvenuti, D.; Arulampalam, M.S. Performance Bounds and Comparison of Nonlinear Filters for Tracking a Ballistic Object on Re-Enty. IEE Proc. Radar Sonar Navig. 2003, 150, 65–70. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented Filtering and Nonlinear Estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Singh, N.K.; Bhaumik, S.; Bhattacharya, S. Tracking of Ballistic Target on Re-Entry Using Ensemble Kalman Filter. In Proceedings of the Annual IEEE India Conference, Kochi, India, 7–9 December 2012; pp. 508–513.
- Tseng, C.H.; Lin, S.F.; Jwo, D.J. Fuzzy Adaptive Cubature Kalman Filter for Integrated Navigation Systems. Sensors 2016, 16, 1167. [Google Scholar] [CrossRef] [PubMed]
- Zhu, W.; Wang, W.; Yuan, G. An Improved Interacting Multiple Model Filtering Algorithm Based on the Cubature Kalman Filter for Maneuvering Target Tracking. Sensors 2016, 16, 805. [Google Scholar] [CrossRef] [PubMed]
- Barrios, C.; Motai, Y.; Huston, D. Intelligent Forecasting Using Dead Reckoning with Dynamic Errors. IEEE Trans. Ind. Inf. 2016. [Google Scholar] [CrossRef]
- Lee, S.J.; Motai, Y.; Choi, H. Tracking Human Motion with Multichannel Interacting Multiple Model. IEEE Trans. Ind. Inf. 2013, 9, 1751–1763. [Google Scholar] [CrossRef]
- Himberg, H.; Motai, Y.; Bradley, A. A Multiple Model Approach to Track Head Orientation with Delta Quaternions. IEEE Trans. Cybern. 2013, 43, 90–101. [Google Scholar] [CrossRef] [PubMed]
- Chang, K.; Chong, C.Y.; Mori, S. Analytical and Computational Evaluation of Scalable Distributed Fusion Algorithms. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 2022–2034. [Google Scholar] [CrossRef]
- Grime, S.; Durrant-Whyte, H. Communication in Decentralized Systems. IFAC Control Eng. Pract. 1994, 2, 849–863. [Google Scholar] [CrossRef]
- Hurley, M.B. An Information Theoretic Justification for Covariance Intersection and Its Generalization. In Proceedings of the Fifth International Conference on Information Fusion, Annapolis, MD, USA, 8–11 July 2002; pp. 505–511.
- Liggins, M., II; Hall, D.; Llinas, J. Handbook of Multisensor Data Fusion: Theory and Practice; CRC Press: Boca Raton, FL, USA, 2008; pp. 424–427. [Google Scholar]
- Martin, T.W.; Chang, K.C. A Distributed Data Fusion Approach for Mobile Ad Hoc Networks. In Proceedings of the 8th International Conference on Information Fusion, Philadelphia, PA, USA, 25–28 July 2005; pp. 1062–1069.
- Weng, Y.; Xiao, W.; Xie, L. Diffusion-Based Em Algorithm for Distributed Estimation of Gaussian Mixtures in Wireless Sensor Networks. Sensors 2011, 11, 6297–6316. [Google Scholar] [CrossRef] [PubMed]
- Julier, S.J. An Empirical Study into the Use of Chernoff Information for Robust, Distributed Fusion of Gaussian Mixture Models. In Proceedings of the 9th International Conference on Information Fusion, Florence, Italy, 10–13 July 2006; pp. 1–8.
- Gunay, M.; Orguner, U.; Demirekler, M. Approximate Chernoff Fusion of Gaussian Mixtures Using Sigma-Points. In Proceedings of the 17th International Conference on Information Fusion (FUSION), Salamanca, Spain, 7–10 July 2014; pp. 1–8.
- Üney, M.; Clark, D.E.; Julier, S.J. Distributed Fusion of PHD Filters via Exponential Mixture Densities. IEEE J. Sel. Top. Sign. Proces. 2013, 7, 521–531. [Google Scholar] [CrossRef]
- Shin, S.J. Re-Entry Vehicle Tracking with a New Multiple Model Estimation Applicable to Highly Non-Linear Dynamics. IET Radar Sonar Navig. 2015, 9, 581–588. [Google Scholar] [CrossRef]
- Farrell, W. Interacting Multiple Model Filter for Tactical Ballistic Missile Tracking. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 418–426. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R. Estimation with Applications to Tracking and Navigation; John Wiley & Sons: New York, NY, USA, 2001; pp. 453–457. [Google Scholar]
- Li, W.; Jia, Y. An Information Theoretic Approach to Interacting Multiple Model Estimation. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1811–1825. [Google Scholar] [CrossRef]
- Tian, X.; Bar-Shalom, Y. On Algorithms for Asynchronous Track-to-Track Fusion. In Proceedings of the 13th Conference on Information Fusion (FUSION), Edinburgh, UK, 26–29 July 2010; pp. 1–8.
- Hall, D.; Chong, C.Y.; Llinas, J.; Liggins, M. Distributed Data Fusion for Network-Centric Operations; CRC Press: Boca Raton, FL, USA, 2012; pp. 105–107. [Google Scholar]
- Chang, K.; Chong, C.Y.; Mori, S. On Scalable Distributed Sensor Fusion. In Proceedings of the 11th International Conference on Information Fusion, Cologne, Germany, 30 June–3 July 2008; pp. 1–8.
- Runnalls, A.R. Kullback-Leibler Approach to Gaussian Mixture Reduction. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 989–999. [Google Scholar] [CrossRef]
- Bromiley, P. Products and Convolutions of Gaussian Probability Density Functions. Available online: http://www.tina-vision.net/docs/memos/2003-003.pdf (accessed on 14 August 2014).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S1 | S2 | CI | |||
|---|---|---|---|---|---|
| X | Y | X | Y | X | Y |
| 478.9 | 953.8 | 660.3 | 1163 | 578.2 | 1102 |
| 425.3 | 820.7 | 625.8 | 1081 | 537.1 | 1014 |
| 345.4 | 644.8 | 563.2 | 927.4 | 474.9 | 868.6 |
| 233.9 | 410 | 488.8 | 786.9 | 404.2 | 710.1 |
| 151.9 | 235.1 | 427.7 | 687 | 319 | 531.9 |
| 109.1 | 150.3 | 385.2 | 647.5 | 258.2 | 426.8 |
| 80.25 | 100.3 | 336.2 | 574.2 | 212.8 | 349 |
| 56.48 | 71.63 | 295.6 | 500.6 | 185 | 319.1 |
| 42.16 | 67.96 | 273.1 | 429.3 | 163.9 | 294.3 |
| 35.5 | 66.76 | 266.1 | 410.4 | 160.7 | 280.4 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, K.; Zhou, R. Sensor Fusion of Gaussian Mixtures for Ballistic Target Tracking in the Re-Entry Phase. Sensors 2016, 16, 1289. https://doi.org/10.3390/s16081289
Lu K, Zhou R. Sensor Fusion of Gaussian Mixtures for Ballistic Target Tracking in the Re-Entry Phase. Sensors. 2016; 16(8):1289. https://doi.org/10.3390/s16081289
Chicago/Turabian StyleLu, Kelin, and Rui Zhou. 2016. "Sensor Fusion of Gaussian Mixtures for Ballistic Target Tracking in the Re-Entry Phase" Sensors 16, no. 8: 1289. https://doi.org/10.3390/s16081289
APA StyleLu, K., & Zhou, R. (2016). Sensor Fusion of Gaussian Mixtures for Ballistic Target Tracking in the Re-Entry Phase. Sensors, 16(8), 1289. https://doi.org/10.3390/s16081289