
On Event-Triggered Adaptive Architectures for Decentralized and Distributed Control of Large-Scale Modular Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Motivation and Literature Review
1.2. Contribution
1.3. Organization
1.4. Notation
2. Event-Triggered Decentralized Adaptive Control
2.1. Overview of a Standard Decentralized Adaptive Control Architecture without Event-Triggering
2.2. Proposed Event-Triggered Decentralized Adaptive Control Architecture
2.2.1. Stability Analysis and Uniform Ultimate Boundedness
2.2.2. Computation of the Ultimate Bound for System Performance Assessment
2.2.3. Computation of the Event-Triggered Inter-Sample Time Lower Bound
2.2.4. Generalizations to the Event-Triggered Decentralized Adaptive Control with State Emulator
3. Event-Triggered Distributed Adaptive Control
3.1. Overview of a Standard Distributed Adaptive Control Architecture without Event-Triggering
3.2. Proposed Event-Triggered Distributed Adaptive Control Architecture
3.2.1. Stability Analysis and Uniform Ultimate Boundedness
3.2.2. Computation of the Ultimate Bound for System Performance Assessment
3.2.3. Computation of the Event-Triggered Inter-Sample Time Lower Bound
3.2.4. Generalizations to the Event-Triggered Distributed Adaptive Control with State Emulator
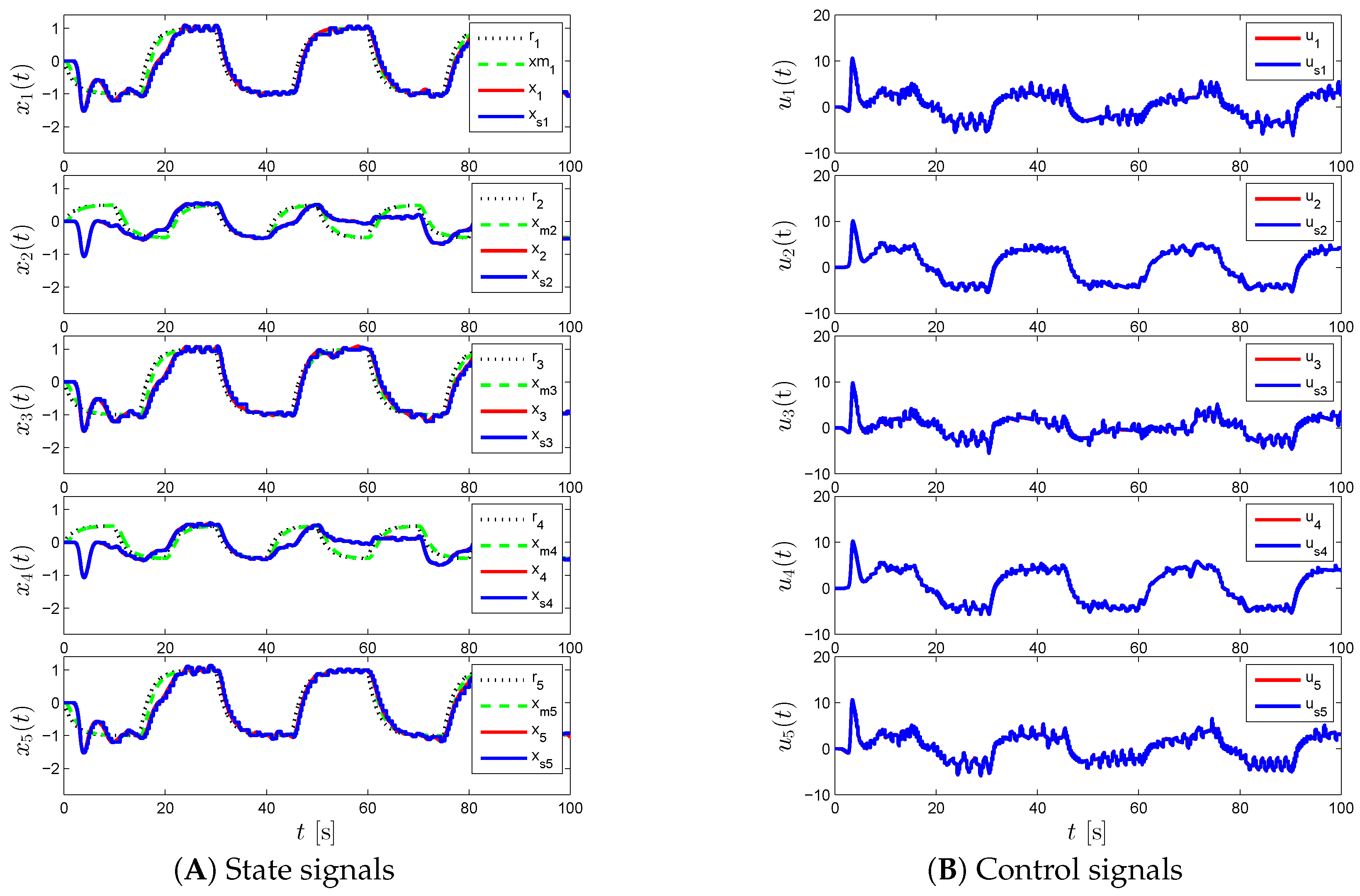
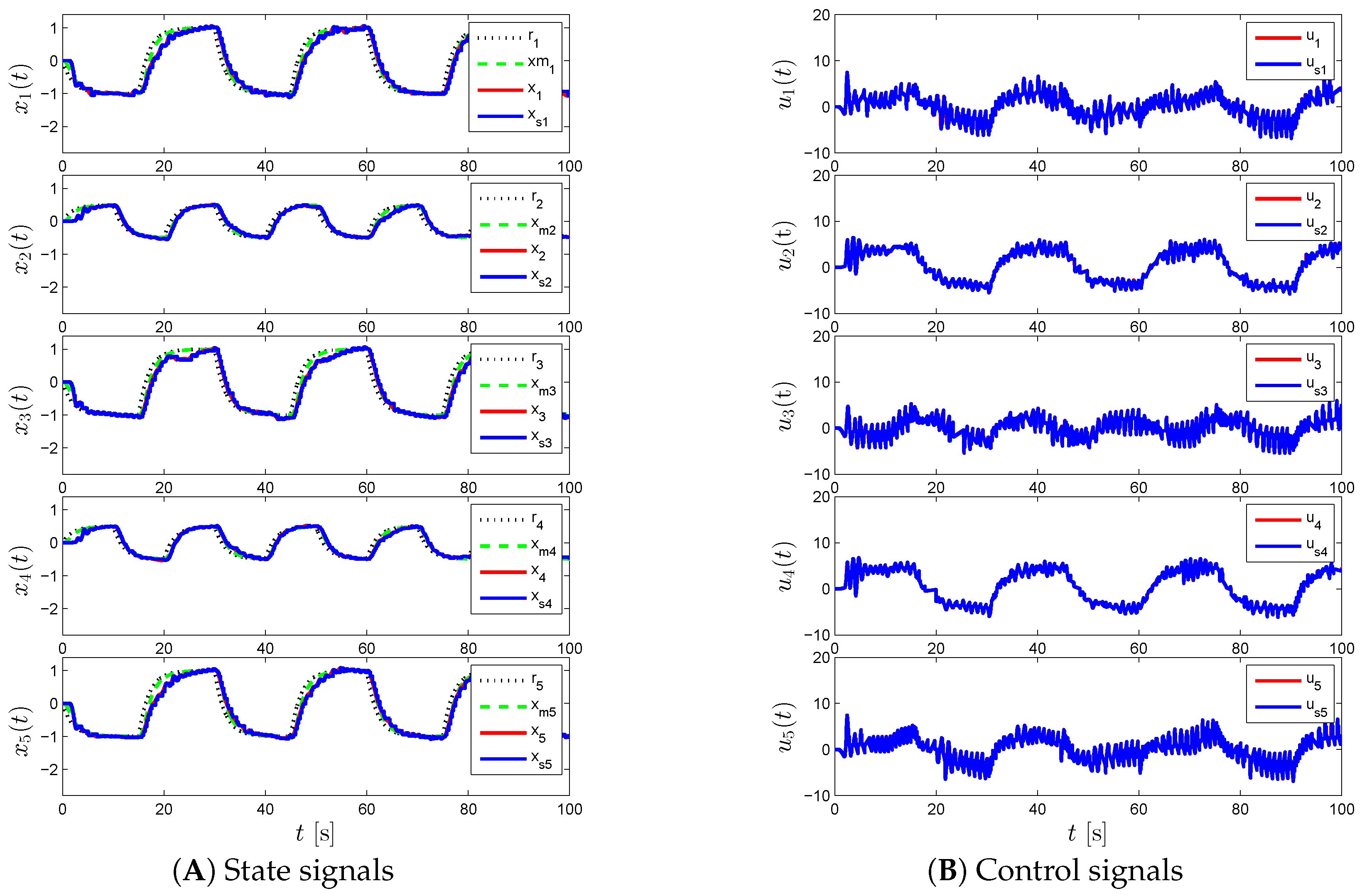
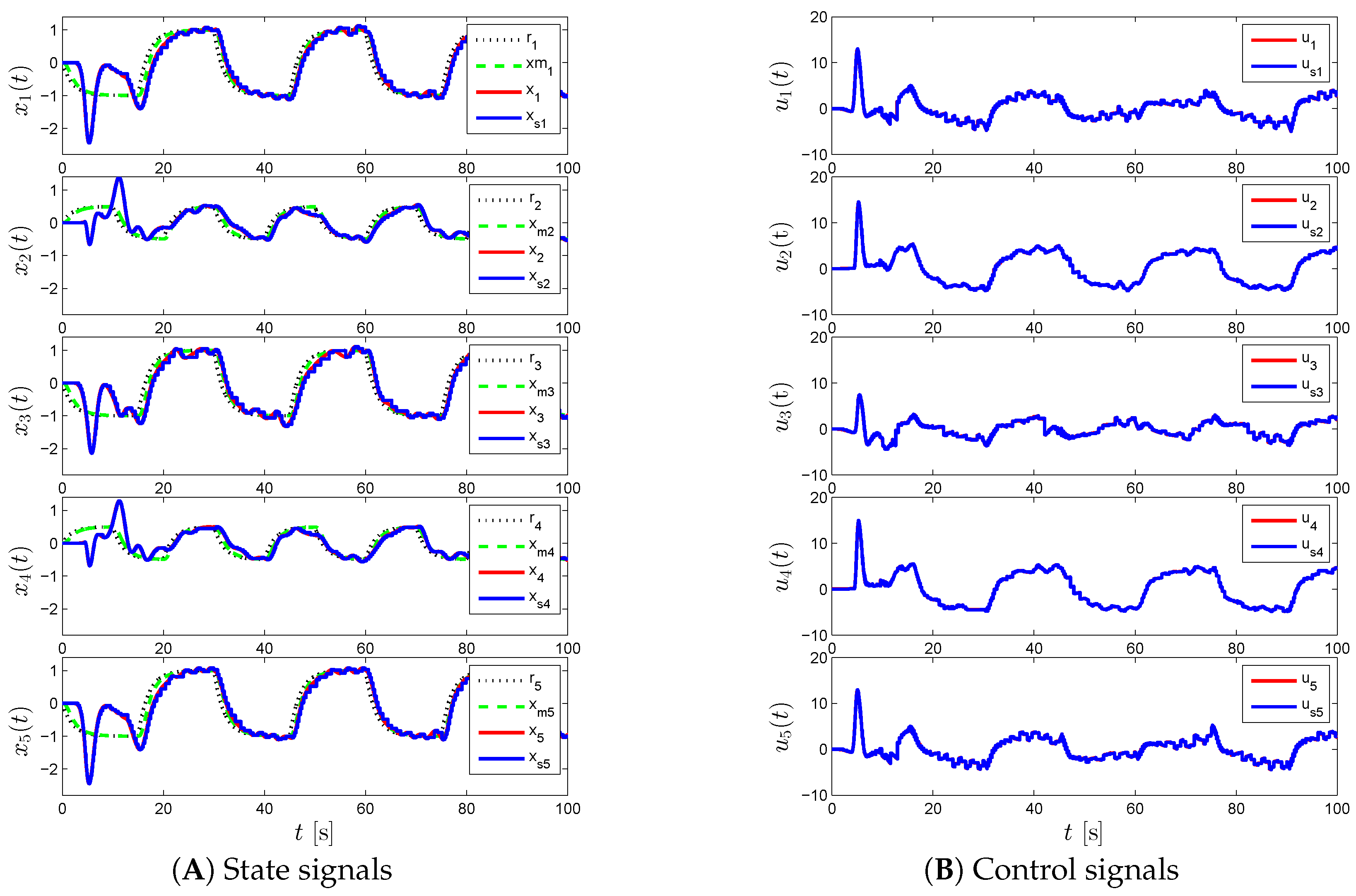
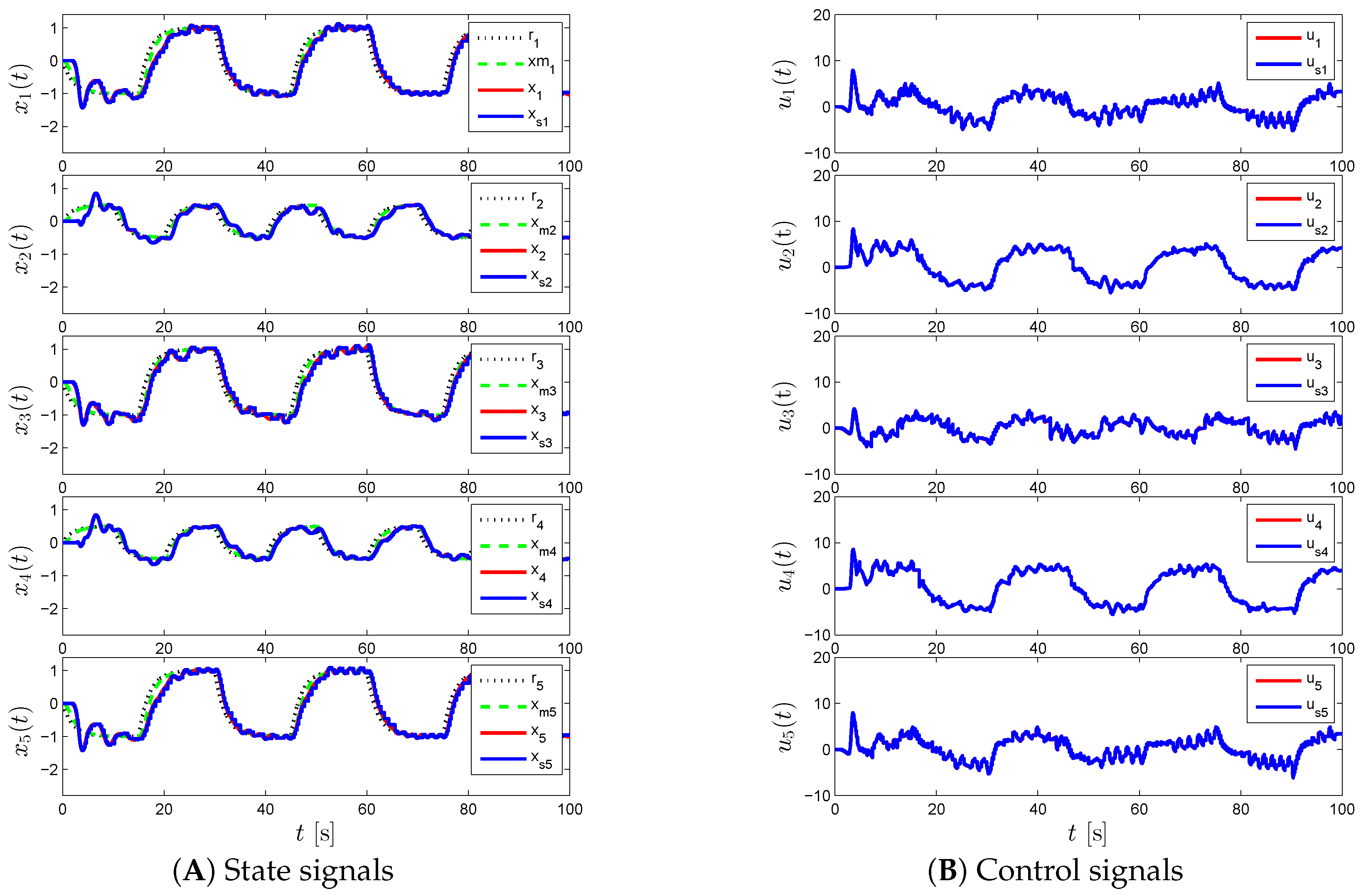
4. Illustrative Numerical Example
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Bullo, F.; Cortes, J.; Martinez, S. Distributed Control of Robotic Networks: A Mathematical Approach to Motion Coordination Algorithms; Princeton University Press: Princeton, NJ, USA, 2009. [Google Scholar]
- Mesbahi, M.; Egerstedt, M. Graph Theoretic Methods in Multiagent Networks; Princeton University Press: Princeton, NJ, USA, 2010. [Google Scholar]
- Siljak, D.D. Decentralized Control of Complex Systems; Courier Corporation: North Chelmsford, MA, USA, 2011. [Google Scholar]
- Yucelen, T.; Johnson, E.N. Control of multi-vehicle systems in the presence of uncertain dynamics. Int. J. Control 2013, 86, 1540–1553. [Google Scholar] [CrossRef]
- Davison, E.J.; Aghdam, A.G. Decentralized Control of Large-Scale Systems; Springer Publishing Company: New York, NY, USA, 2014. [Google Scholar]
- Yucelen, T.; Shamma, J.S. Adaptive architectures for distributed control of modular systems. In Proceedings of the American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 1328–1333.
- Ioannou, P.A.; Sun, J. Robust Adaptive Control; Courier Corporation: North Chelmsford, MA, USA, 2012. [Google Scholar]
- Yucelen, T.; Haddad, W.M. A robust adaptive control architecture for disturbance rejection and uncertainty suppression with transient and steady-state performance guarantees. Int. J. Adapt. Control Signal Process. 2012, 26, 1024–1055. [Google Scholar] [CrossRef]
- Åström, K.J.; Wittenmark, B. Adaptive Control; Courier Corporation: North Chelmsford, MA, USA, 2013. [Google Scholar]
- Lavretsky, E.; Wise, K.A. Robust Adaptive Control. In Robust and Adaptive Control; Springer-Verlag London: London, UK, 2013. [Google Scholar]
- Narendra, K.S.; Annaswamy, A.M. Stable Adaptive Systems; Courier Corporation: North Chelmsford, MA, USA, 2012. [Google Scholar]
- Yucelen, T.; Haddad, W.M. Low-frequency learning and fast adaptation in model reference adaptive control. IEEE Trans. Autom. Control 2013, 58, 1080–1085. [Google Scholar] [CrossRef]
- Yucelen, T.; de la Torre, G.; Johnson, E.N. Improving transient performance of adaptive control architectures using frequency-limited system error dynamics. Int. J. Control 2014, 87, 2383–2397. [Google Scholar] [CrossRef]
- Åström, K.J.; Bernhardsson, B. Comparison of Riemann and Lebesque sampling for first order stochastic systems. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2012; pp. 2011–2016.
- Tabuada, P. Event-triggered real-time scheduling of stabilizing control tasks. IEEE Trans. Autom. Control 2007, 52, 1680–1685. [Google Scholar] [CrossRef]
- Heemels, W.; Donkers, M.; Teel, A.R. Periodic event-triggered control for linear systems. IEEE Trans. Autom. Control 2013, 58, 847–861. [Google Scholar] [CrossRef]
- Ioannou, P. Decentralized adaptive control of interconnected systems. IEEE Trans. Autom. Control 1986, 31, 291–298. [Google Scholar] [CrossRef]
- Gavel, D.T.; Siljak, D. Decentralized adaptive control: Structural conditions for stability. IEEE Trans. Autom. Control 1989, 34, 413–426. [Google Scholar] [CrossRef]
- Shi, L.; Singh, S.K. Decentralized adaptive controller design for large-scale systems with higher order interconnections. IEEE Trans. Autom. Control 1992, 37, 1106–1118. [Google Scholar] [CrossRef]
- Spooner, J.T.; Passino, K.M. Decentralized adaptive control of nonlinear systems using radial basis neural networks. IEEE Trans. Autom. Control 1999, 44, 2050–2057. [Google Scholar] [CrossRef]
- Mirkin, B.M. Decentralized adaptive controller with zero residual tracking errors. In Proceedings of the 7th Mediterranean Conference on Control and Automation (MED99), Haifa, Israel, 28–30 June 1999; pp. 28–30.
- Narendra, K.S.; Oleng, N.O. Exact output tracking in decentralized adaptive control systems. IEEE Trans. Autom. Control 2002, 47, 390–395. [Google Scholar] [CrossRef]
- Yucelen, T.; Yang, B.J.; Calise, A.J. Derivative-free decentralized adaptive control of large-scale interconnected uncertain systems. In Proceedings of the 2011 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 1104–1109.
- Mazo, M.; Tabuada, P. Decentralized event-triggered control over wireless sensor/actuator networks. IEEE Trans. Autom. Control 2011, 56, 2456–2461. [Google Scholar] [CrossRef]
- Molin, A.; Hirche, S. Optimal design of decentralized event-triggered controllers for large-scale systems with contention-based communication. In Proceedings of the IEEE Conference on Decision and Control and European Control, Orlando, FL, USA, 12–15 December 2011; pp. 4710–4716.
- Dimarogonas, D.V.; Frazzoli, E.; Johansson, K.H. Distributed event-triggered control for multi-agent systems. IEEE Trans. Autom. Control 2012, 57, 1291–1297. [Google Scholar] [CrossRef]
- Donkers, M.; Heemels, W. Output-based event-triggered control with guaranteed-gain and improved and decentralized event-triggering. IEEE Trans. Autom. Control 2012, 57, 1362–1376. [Google Scholar] [CrossRef]
- Garcia, E.; Cao, Y.; Yu, H.; Antsaklis, P.; Casbeer, D. Decentralised event-triggered cooperative control with limited communication. Int. J. Control 2013, 86, 1479–1488. [Google Scholar] [CrossRef]
- Fan, Y.; Feng, G.; Wang, Y.; Song, C. Distributed event-triggered control of multi-agent systems with combinational measurements. Automatica 2013, 49, 671–675. [Google Scholar] [CrossRef]
- Garcia, E.; Cao, Y.; Casbeer, D.W. Cooperative control with general linear dynamics and limited communication: Centralized and decentralized event-triggered control strategies. In Proceedings of the IEEE American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 159–164.
- Sahoo, A.; Xu, H.; Jagannathan, S. Neural network-based adaptive event-triggered control of nonlinear continuous-time systems. In Proceedings of the IEEE International Symposium on Intelligent Control, Hyderabad, India, 28–30 August 2013; pp. 35–40.
- Sahoo, A.; Xu, H.; Jagannathan, S. Neural network approximation-based event-triggered control of uncertain MIMO nonlinear discrete time systems. In Proceedings of the IEEE American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 2017–2022.
- Wang, X.; Hovakimyan, N. adaptive control of event-triggered networked systems. In Proceedings of the IEEE American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 2458–2463.
- Wang, X.; Kharisov, E.; Hovakimyan, N. Real-time adaptive control for uncertain networked control systems. IEEE Trans. Autom. Control 2015, 60, 2500–2505. [Google Scholar] [CrossRef]
- Albattat, A.; Gruenwald, B.C.; Yucelen, T. Event-triggered adaptive control. In Proceedings of the ASME Dynamic Systems and Control Conference, Columbus, OH, USA, 28–30 October 2015.
- Albattat, A.; Gruenwald, B.C.; Yucelen, T. Output Feedback Adaptive Control of Uncertain Dynamical Systems with Event-Triggering. In Adaptive Control for Robotic Manipulators; CRC Press/Taylor & Francis Group: Boca Raton, FL, USA, accepted.
- Lavretsky, E.; Gadient, R.; Gregory, I.M. Predictor-based model reference adaptive control. J. Guid. Control Dyn. 2010, 33, 1195–1201. [Google Scholar] [CrossRef]
- Muse, J.A.; Calise, A.J. adaptive flight control of the generic transport model. In Proceedings of the AIAA Infotech@Aerospace 2010, Atlanta, GA, USA, 20–22 April 2010.
- Stepanyan, V.; Krishnakumar, K. MRAC revisited: Guaranteed performance with reference model modification. In Proceedings of the IEEE American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 93–98.
- Stepanyan, V.; Krishnakumar, K. M-MRAC for nonlinear systems with bounded disturbances. In Proceedings of the IEEE Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 5419–5424.
- Gibson, T.E.; Annaswamy, A.M.; Lavretsky, E. Improved transient response in adaptive control using projection algorithms and closed loop reference models. In Proceedings of the AIAA Guidance Navigation and Control Conference, Chicago, IL, USA, 10–13 August 2012.
- Gibson, T.E.; Annaswamy, A.M.; Lavretsky, E. Adaptive systems with closed-loop reference models: Stability, robustness and transient performance. 2012; arXiv:1201.4897. [Google Scholar]
- Godsil, C.; Royle, G. Algebraic Graph Theory; Springer: New York, NY, USA, 2001. [Google Scholar]
- Pomet, J.B.; Praly, L. Adaptive nonlinear regulation: Estimation from the Lyapunov equation. IEEE Trans. Autom. Control 1992, 37, 729–740. [Google Scholar] [CrossRef]
- Lavretsky, E.; Gibson, T.E.; Annaswamy, A.M. Projection operator in adaptive systems. 2011; arXiv:1112.4232. [Google Scholar]
- Bernstein, D.S. Matrix Mathematics: Theory, Facts, and Formulas; Princeton University Press: Princeton, NJ, USA, 2009. [Google Scholar]
- Kim, K.; Yucelen, T.; Calise, A.J. A parameter dependent Riccati equation approach to output feedback adaptive control. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, OR, USA, 8–11 August 2011.
- Glover, K.; Doyle, J.; Khargonekar, P.P.; Francis, B.A. State space solutions to standard H2 and H∞ control problems. IEEE Trans. Autom. Control 1989, 34, 83–847. [Google Scholar]









© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Albattat, A.; Gruenwald, B.C.; Yucelen, T. On Event-Triggered Adaptive Architectures for Decentralized and Distributed Control of Large-Scale Modular Systems. Sensors 2016, 16, 1297. https://doi.org/10.3390/s16081297
Albattat A, Gruenwald BC, Yucelen T. On Event-Triggered Adaptive Architectures for Decentralized and Distributed Control of Large-Scale Modular Systems. Sensors. 2016; 16(8):1297. https://doi.org/10.3390/s16081297
Chicago/Turabian StyleAlbattat, Ali, Benjamin C. Gruenwald, and Tansel Yucelen. 2016. "On Event-Triggered Adaptive Architectures for Decentralized and Distributed Control of Large-Scale Modular Systems" Sensors 16, no. 8: 1297. https://doi.org/10.3390/s16081297
APA StyleAlbattat, A., Gruenwald, B. C., & Yucelen, T. (2016). On Event-Triggered Adaptive Architectures for Decentralized and Distributed Control of Large-Scale Modular Systems. Sensors, 16(8), 1297. https://doi.org/10.3390/s16081297