
Modeling and Analysis of Micro-Spacecraft Attitude Sensing with Gyrowheel

Abstract
:
1. Introduction
2. Descriptions of Gyrowheel
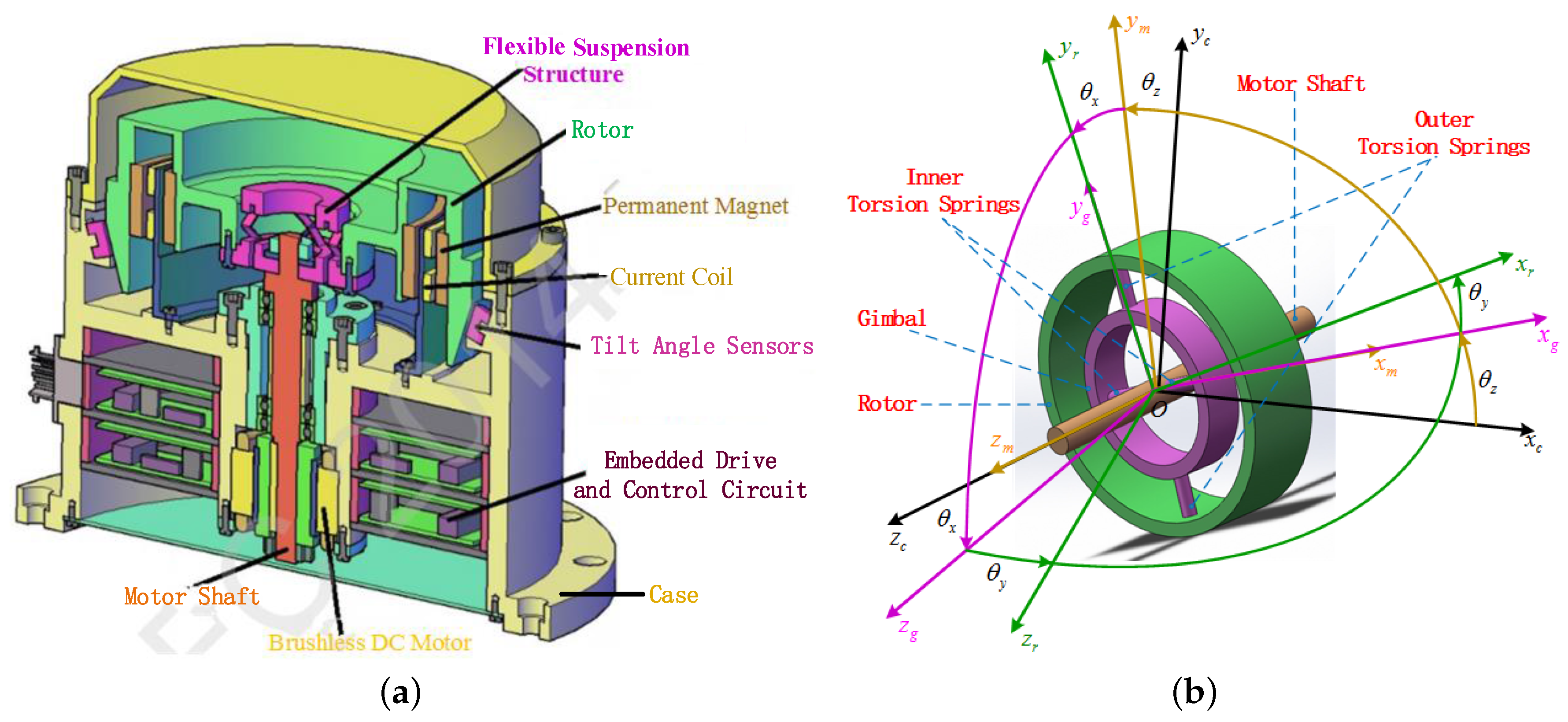
2.1. Gyrowheel Physical Structure
2.2. Equations of Motion for an Idealized Gyrowheel
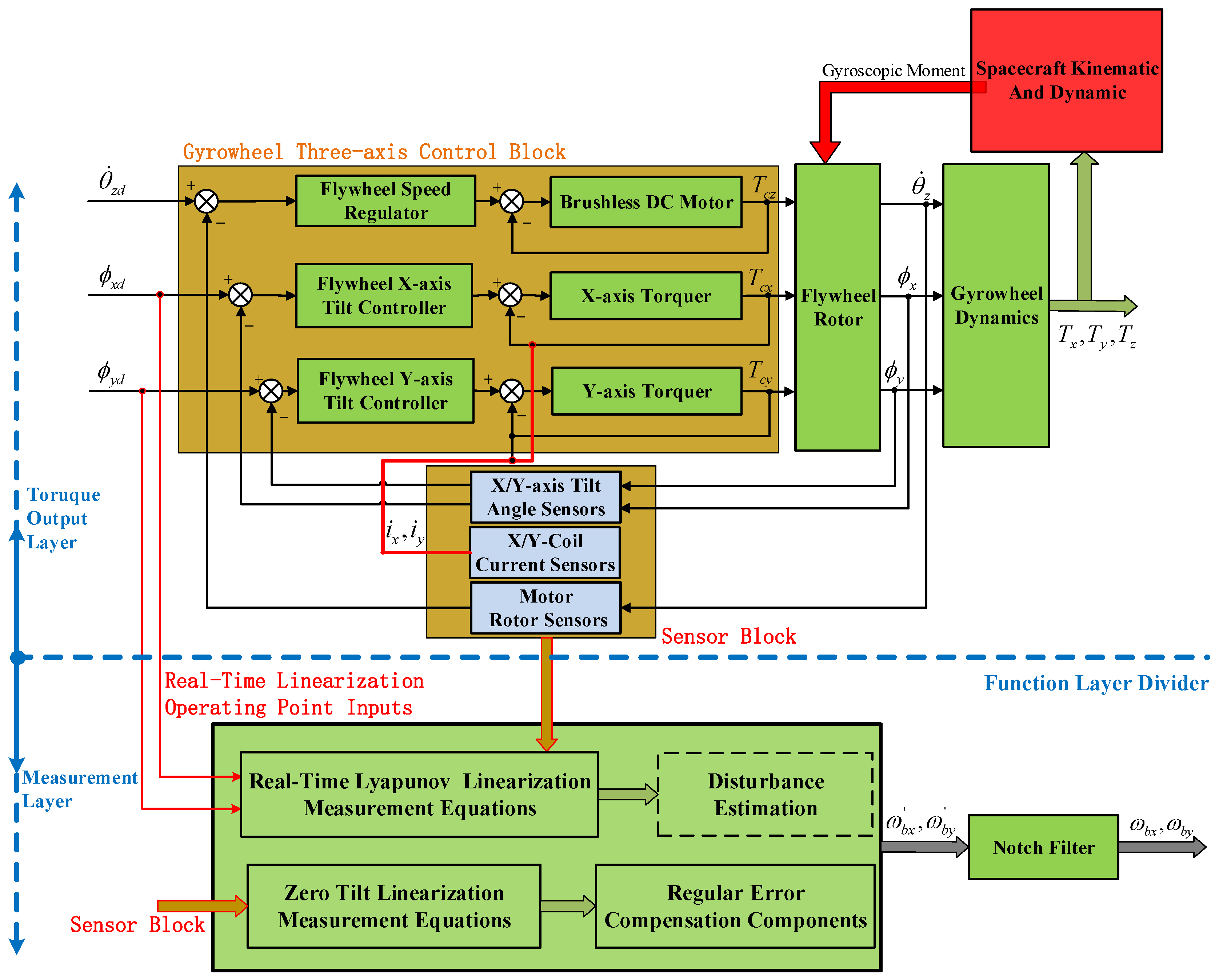
3. Modeling of Angular Rate Sensing with a Gyrowheel
3.1. Measurement Model at Arbitrary Operating Position Based on Real-Time Lyapunov Linearization
3.2. Measurement Model within Small Tilt Angles Based on Complex Quantity Transform
4. Analysis of the Measurement Schemes of Spacecraft Angular Rates with the GW
- (1)
- Compared to Equation (20), the forms of linearization Equation (28) at zero tilt angles are obviously more concise. More importantly, after ignoring the twice periodic components in Equation (27), there exist no terms about motor rotation angle in Equation (28), which means that it is more convenient for the spacecraft angular rate sensing, since the special sensor for measuring the motor rotation angle in real time is no longer needed in this kind of situation.
- (2)
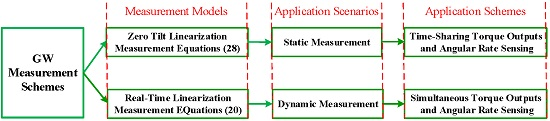
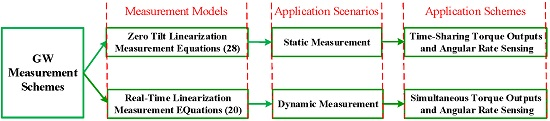
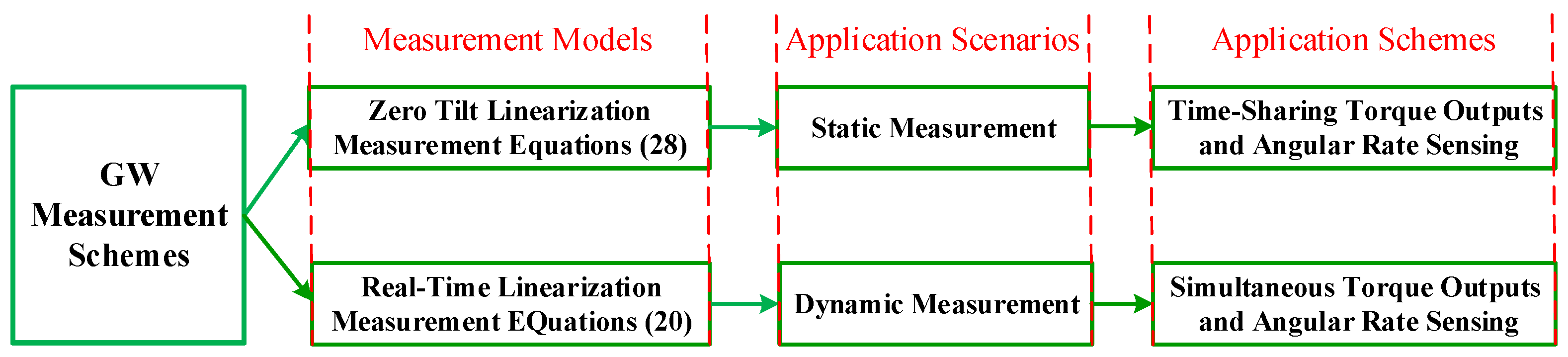
- Equation (28) is obtained by substituting the operating points at zero tilt angles into Equation (20), which are suitable for the arbitrary operating state of the rotor. Therefore, combining the analysis (1), in the smaller tilt range of the rotor, Equation (28) is utilized to realize the spacecraft angular rate sensing with GW. However, when the tilt angles of the rotor become larger, the measurement accuracy with Equation (28) cannot meet the indicator requirement without any error compensation. The applications of the real-time linearization measurement Equation (20) and small tilt measurement Equation (28) are analyzed in the following figure.
- (3)
5. Simulations
5.1. Simulation Platform
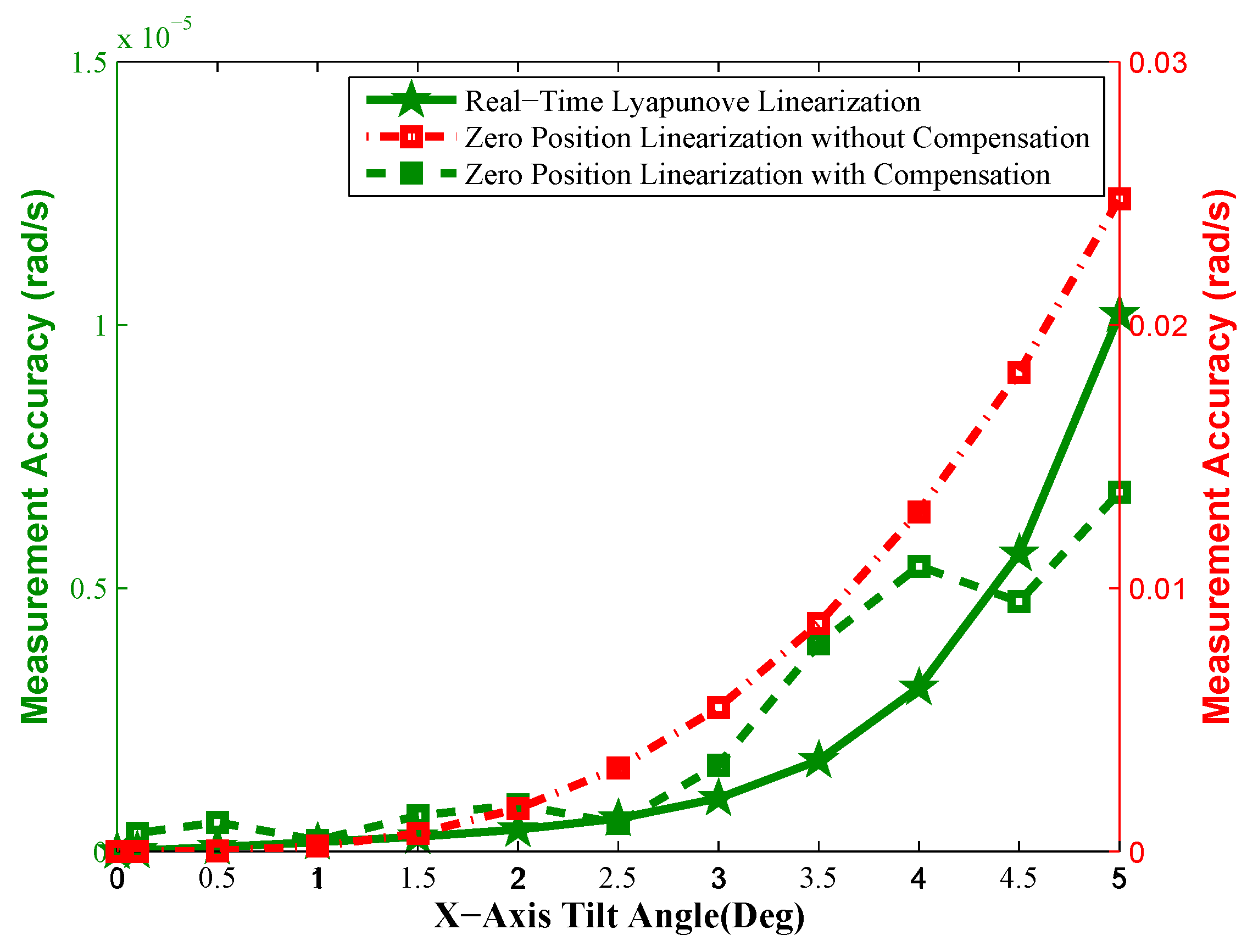
5.2. Static Measurement Validation
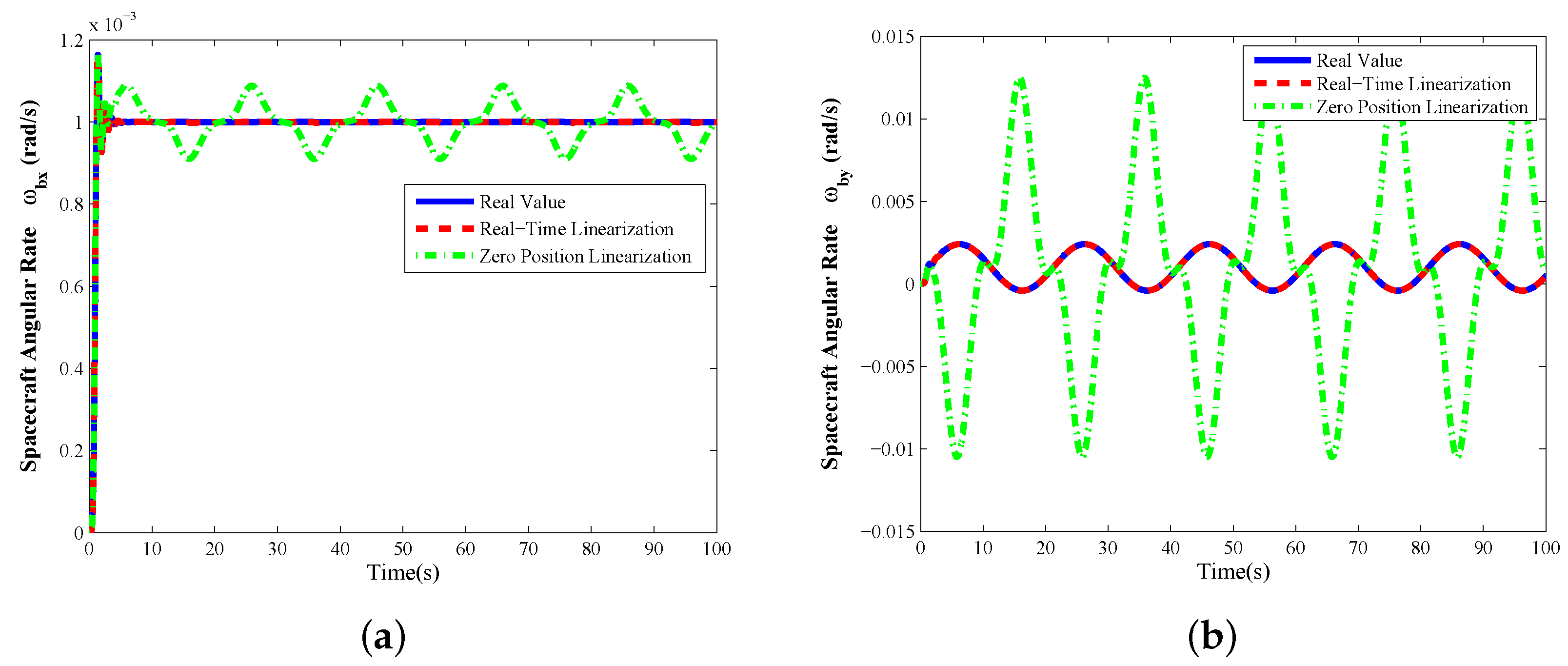
- The measurement accuracy decreases with the increase of the tilt angle for both the real-time linearization equation and the zero position linearization equation; however, due to the linearization operating points at zero tilt angles, the measurement accuracy of the latter deteriorates more seriously than the former.
- The absolute measurement accuracy of the real-time linearization Equation (20) within operating ranges meets the adequate accuracy requirement. Therefore, Equation (20) can be applied to the operating state at arbitrary tilt angles, but if there is not any linearization error compensation for Equation (28), the zero position linearization Equation (28) is more suitable for the small tilt angle of the rotor, rather than the larger tilt angle of the rotor (for example, see Figure 6 and Figure 7.
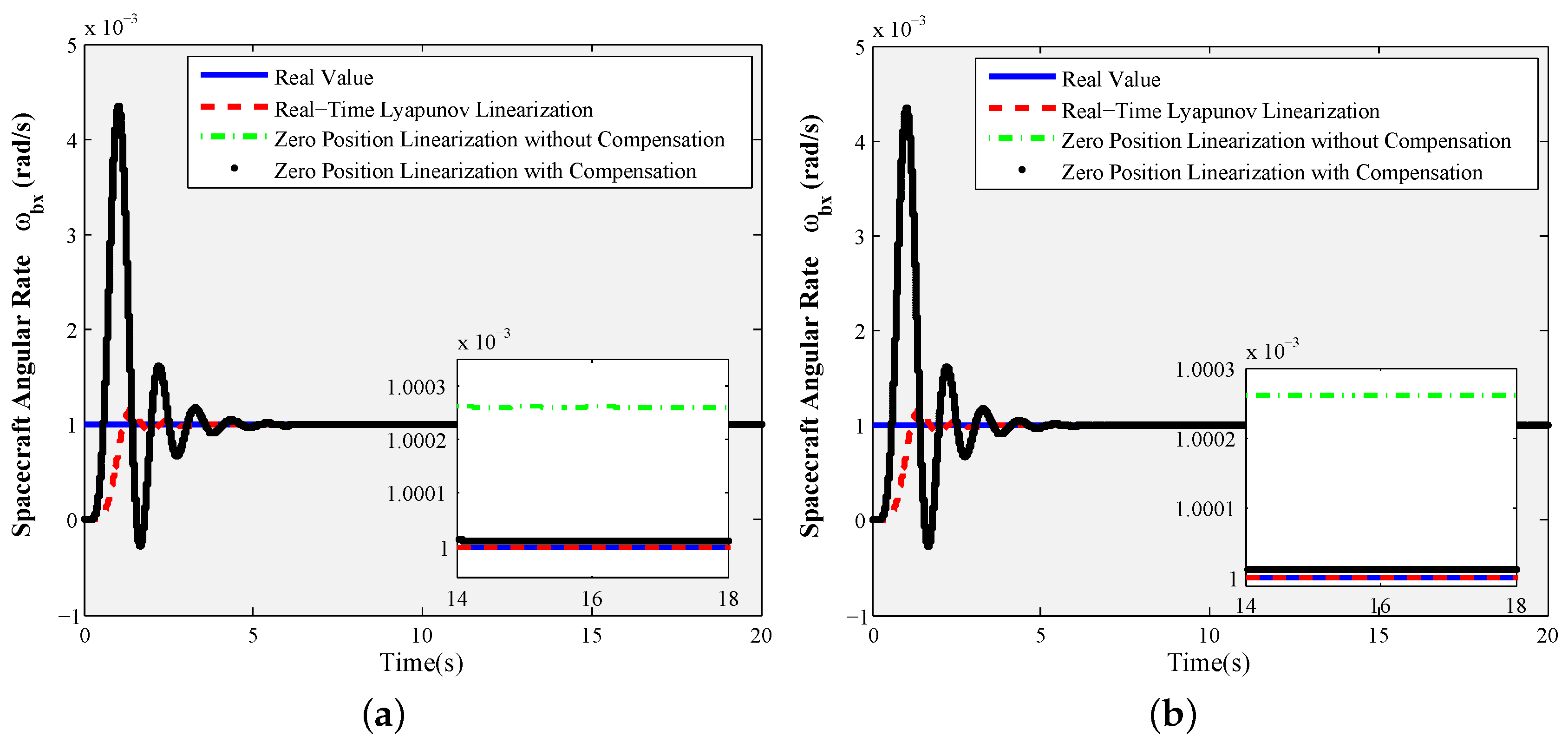
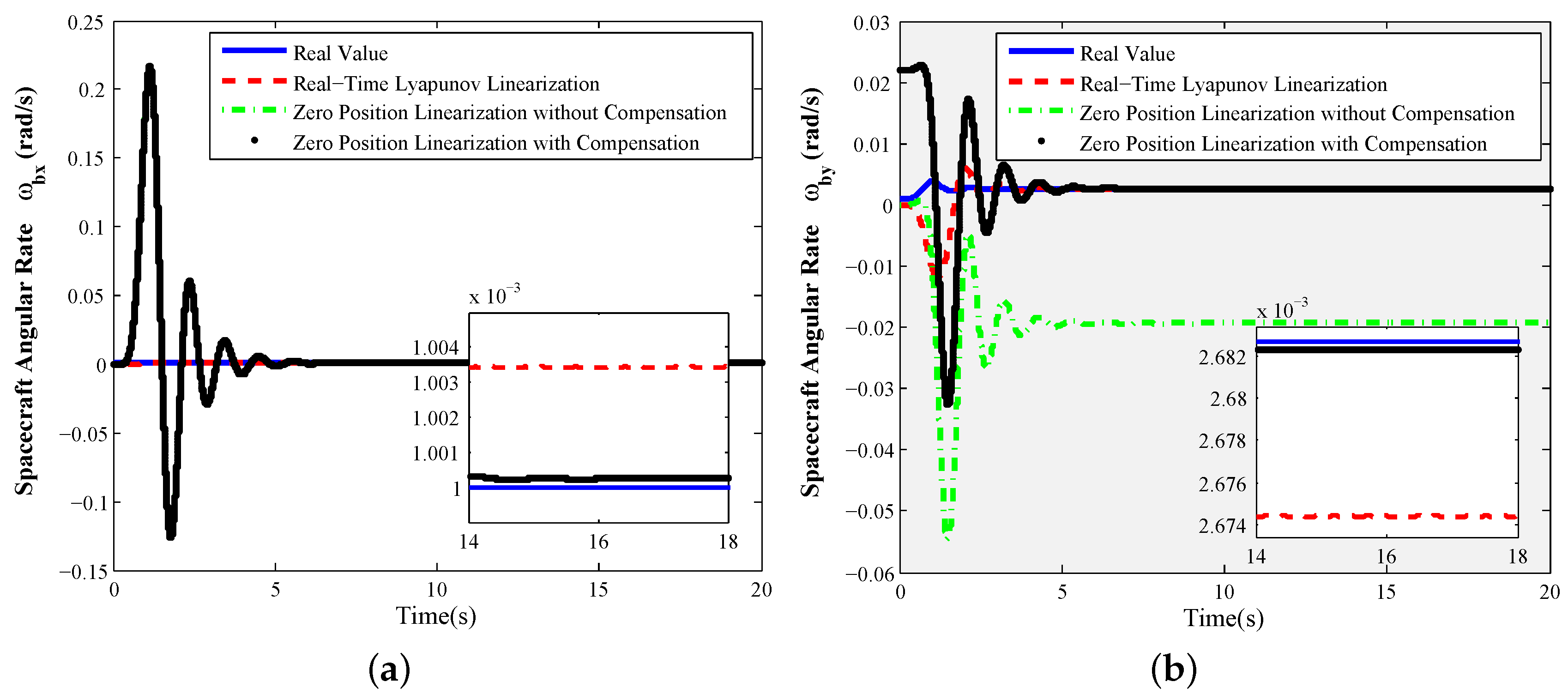
5.3. Dynamic Measurement Validation
6. Conclusions
- (1)
- By combining the real-time Lyapunov’s linearization with the complex quantity transform, two different measurement models of the spacecraft angular rate sensing with GW are established; we named them as the “real-time Lyapunov linearization measurement model” and the “small tilt measurement model”, respectively.
- (2)
- For both established measurement models of GW, two different application schemes are proposed: “time-sharing multiplexing of actuator and sensor” and “simultaneous realization of actuator and sensor”. Additionally, the advantage and disadvantage of the two measurement schemes is also presented.
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| GW | Gyrowheel |
| ACS | Attitude control system |
| DTG | Dynamically-tuned gyroscope |
| VSCMG | Variable-speed control moment gyroscope |
| CMG | Control moment gyroscope |
| MSDGCMG | Magnetically-suspended double-gimbal control moment gyroscope |
| AMBs | Active magnetic bearings |
References
- Wu, B. Spacecraft Attitude Control with Input Quantization. AIAA J. Guid. Control Dyn. 2016, 39, 176–181. [Google Scholar] [CrossRef]
- Battagliere, M.L.; Santoni, F.; Piergentili, F. Passive magnetic attitude stabilization system of the EduSAT microsatellite. Proc. Inst. Mech. Eng. G J. Aerosp. Eng. 2010, 224, 1097–1106. [Google Scholar] [CrossRef]
- Rufino, G.; Grassi, M. Multi-Aperture CMOS Sun Sensor for Microsatellite Attitude Determination. Sensors 2009, 9, 4503–4524. [Google Scholar] [CrossRef] [PubMed]
- Chobotov, V.A. Spacecraft Attitude Dynamics and Control; Krieger Publishing Company: Malabar, FL, USA, 1991. [Google Scholar]
- Fang, J.; Zheng, S.; Han, B. Attitude sensing and dynamic decoupling based on active magnetic bearing of MSDGCMG. IEEE Trans. Instrum. Meas. 2012, 61, 338–348. [Google Scholar] [CrossRef]
- Liu, B.; Fang, J.; Liu, G. Design of a magnetically suspended gyrowheel and analysis of key technologies. Acta Aeronaut. Astronaut. Sin. 2011, 32, 1478–1487. [Google Scholar]
- Stevenson, D.; Schaub, H. Nonlinear control analysis of a double-gimbal variable-speed control moment gyroscope. AIAA J. Guid. Control Dyn. 2012, 35, 787–793. [Google Scholar] [CrossRef]
- Inumoh, L.O.; Forshaw, J.L.; Horri, N.M. Tilted wheel satellite attitude control with air-bearing table experimental results. Acta Aeronaut. Astronaut. Sin. 2015, 117, 414–429. [Google Scholar] [CrossRef]
- Inumoh, L.O.; Horri, N.M.; Forshaw, J.L.; Pechev, A. Bounded gain-scheduled LQR satellite control using a tilted wheel. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1726–1738. [Google Scholar] [CrossRef]
- Zhang, H. Measuring attitude rates through angular momentum gyros. J. Spacecr. Rocket. 1999, 36, 919–921. [Google Scholar] [CrossRef]
- Dzielski, J.; Bergmann, E.; Paradiso, J.A.; Rowell, D.; Wormley, D. Approach to control moment gyroscope steering using feedback linearization. AIAA J. Guid. Control Dyn. 1991, 14, 96–106. [Google Scholar] [CrossRef]
- Titterton, D.H.; Weston, J.L. Strapdown Inertial Navigation Technology, 2nd ed.; The Institution of Electrical Engineers: Stevenage, UK, 2004. [Google Scholar]
- Zheng, S.; Han, B.; Guo, L. Composite Hierarchical Antidisturbance Control for Magnetic Bearing System Subject to Multiple External Disturbances. IEEE Trans. Ind. Electron. 2014, 61, 7004–7012. [Google Scholar] [CrossRef]
- Tyc, G.; Whitehead, W.; Pradhan, S. GyroWheelTM—An Innovative New Actuator\Sensor for 3-axis Spacecraft Attitude Control. In Proceedings of the 13th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 23–26 August 1999.
- Harrison, P.T. Development and Testing of a GyroWheel Based Control System for the SCISAT-1 Scientific Satellite. Master’s Thesis, Department of Mechanical and erospace Engineering, Carleton University, Ottawa, ON, Canada, 2003. [Google Scholar]
- Zheng, S.; Han, B. Investigations of an integrated angular velocity measurement and attitude control system for spacecraft using magnetically suspended double-gimbal CMGs. Adv. Space Res. 2013, 51, 2216–2228. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, H.; Huo, X.; Yao, Y. Analysis of characteristics of torque output of gyrowheel. In Proceedings of the 27th Chinese Control and Decision Conference, Qingdao, China, 23–25 May 2015; pp. 4668–4673.
- Cain, J.S. Investigation of the Crossed Flexure Pivot and the Dynamics of the Momentum Management System Spacecraft Control Component and the Dynamically Tuned Gyroscope; Carleton University: Ottawa, ON, Canada, 1999. [Google Scholar]
- Ower, J.C. Analysis and Control System Design of an Innovative Tuned-Rotor Instrument. Ph.D. Thesis, Department of Mechanical and erospace Engineering, Carleton University, Ottawa, ON, Canada, 2000. [Google Scholar]
- Hall, J.M. Calibration of an Innovative Rate Sensing/momentum Management Instrument for De-Tuned Operation and Temperature Effects. Master’s Thesis, Department of Mechanical and Erospace Engineering, Carleton University, Ottawa, ON, Canada, 2000. [Google Scholar]
- Liu, X.; Zhao, H.; Huo, X.; Zhang, X.; Yao, Y. A new rate sensing scheme for an innovative actuator\sensor-gyrowheel. In Proceedings of the 2015 54th Annual Conference of the IEEE Society of Instrument and Control Engineers of Japan (SICE), Hang Zhou, China, 28–30 July 2015; pp. 134–139.
- Chen, X.Y.; Wan, D.J. Test Method for Calibrating Dynamic Error Parameters of Strapdown Gyroscopes. J. Southeast Univ. 1998, 28, 114–119. [Google Scholar]
- Liu, X.; Yao, Y.; Ma, K.; Zhao, H.; He, F. Spacecraft Angular Rates Estimation with Gyrowheel Based on Extended High Gain Observer. Sensors 2016, 16, 537–556. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Joo, E. Hybrid fuzzy control of robotics systems. IEEE Trans. Fuzzy Syst. 2004, 12, 755–765. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice-Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Craig, J.G. Theory of Operation of an Elastically Supported Tuned Gyroscope. IEEE Trans. Aerosp. Electron. Syst. 1972, 8, 280–288. [Google Scholar] [CrossRef]
- Boskovic, J.D.; Li, S.; Mehra, R.K. Fault tolerant control of spacecraft in the presence of sensor bias. In Proceedings of the American Control Conference, Chicago, IL, USA, 28–30 June 2000; pp. 1205–1209.
- Mercker, T.H.; Akella, M.R. Rigid-body attitude tracking with vector measurements and unknown gyro bias. AIAA J. Guid. Control Dyn. 2011, 34, 1474–1484. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value |
|---|---|
| Rotor transverse-axis inertia | kg · m |
| Rotor spin-axis inertia | kg · m |
| Gimbal transverse-axis inertia | kg · m |
| Gimbal spin-axis inertia | kg · m |
| Torsion spring stiffness | |
| Torsion spring damping | 0 Nm/(rad/s) |
| Operating tilt range of rotor | |
| Spacecraft inertia | kg · m |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Zhao, H.; Yao, Y.; He, F. Modeling and Analysis of Micro-Spacecraft Attitude Sensing with Gyrowheel. Sensors 2016, 16, 1321. https://doi.org/10.3390/s16081321
Liu X, Zhao H, Yao Y, He F. Modeling and Analysis of Micro-Spacecraft Attitude Sensing with Gyrowheel. Sensors. 2016; 16(8):1321. https://doi.org/10.3390/s16081321
Chicago/Turabian StyleLiu, Xiaokun, Hui Zhao, Yu Yao, and Fenghua He. 2016. "Modeling and Analysis of Micro-Spacecraft Attitude Sensing with Gyrowheel" Sensors 16, no. 8: 1321. https://doi.org/10.3390/s16081321
APA StyleLiu, X., Zhao, H., Yao, Y., & He, F. (2016). Modeling and Analysis of Micro-Spacecraft Attitude Sensing with Gyrowheel. Sensors, 16(8), 1321. https://doi.org/10.3390/s16081321