
A Novel Slope Method for Measurement of Fluid Density with a Micro-cantilever under Flexural and Torsional Vibrations



Abstract
:1. Introduction
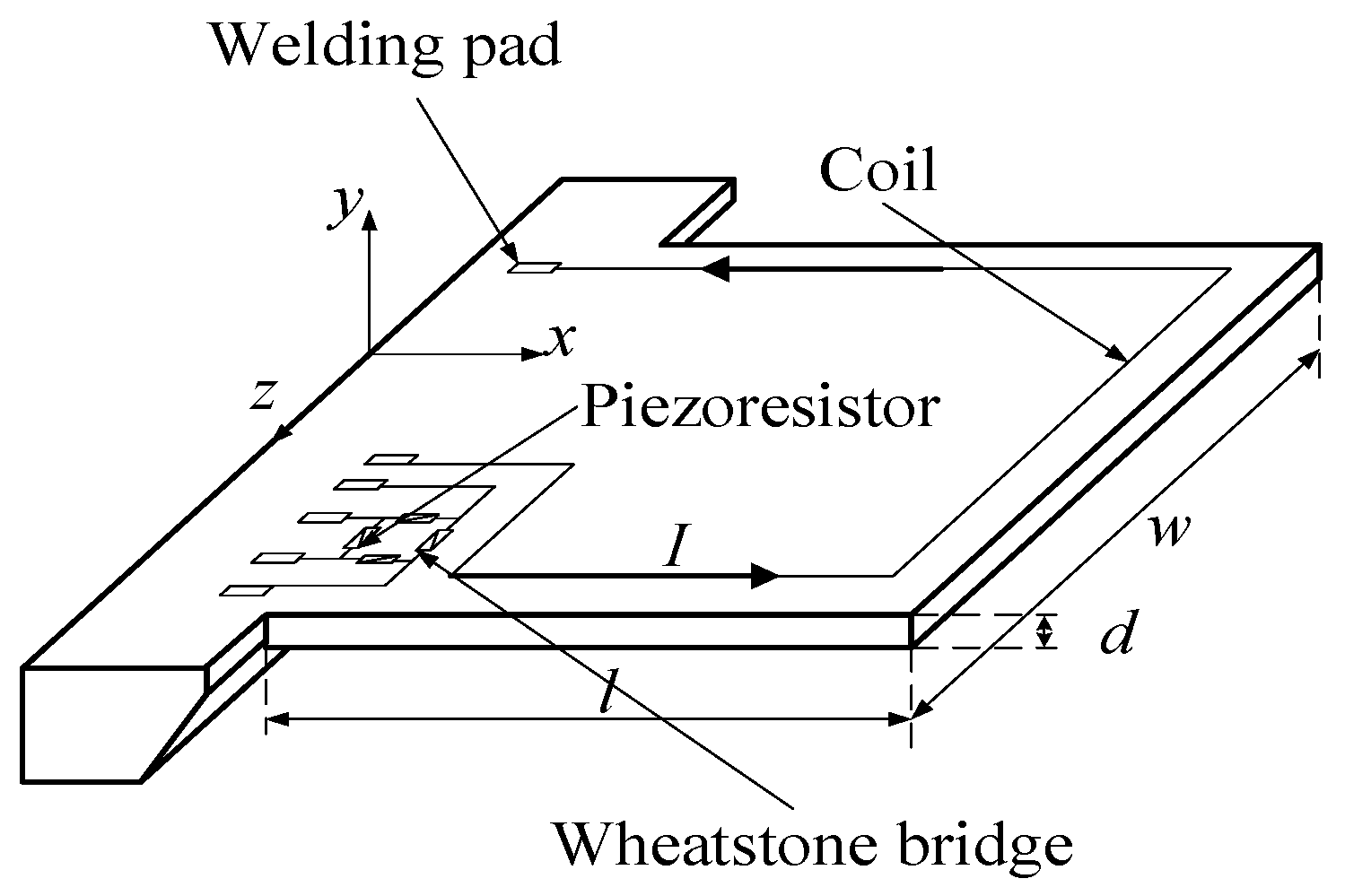
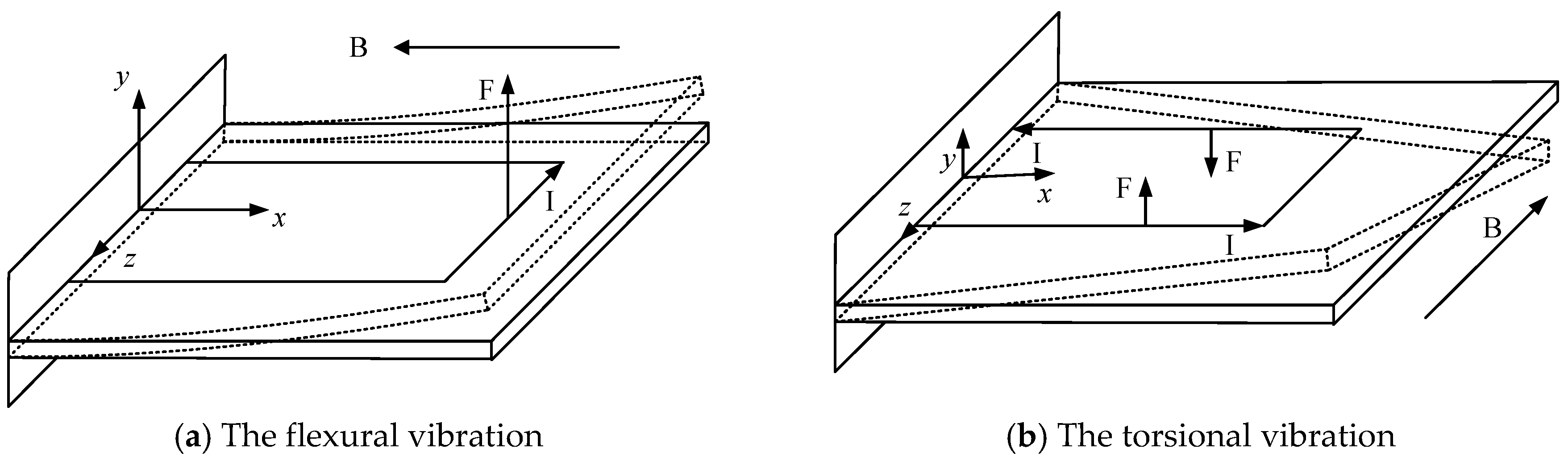
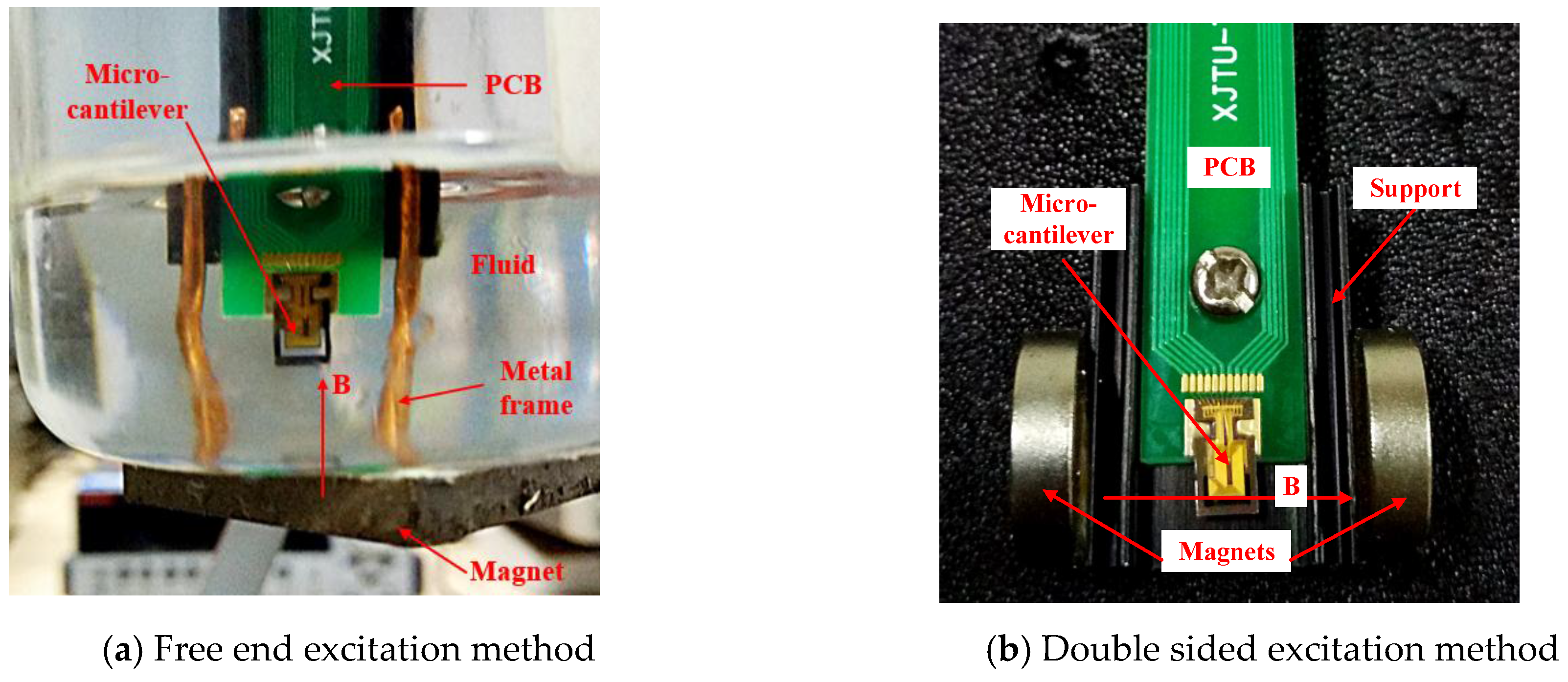
2. The Structure of the Sensing Chip and Two Different Excitation Ways
3. The Slope Method Under Nonresonant Vibration
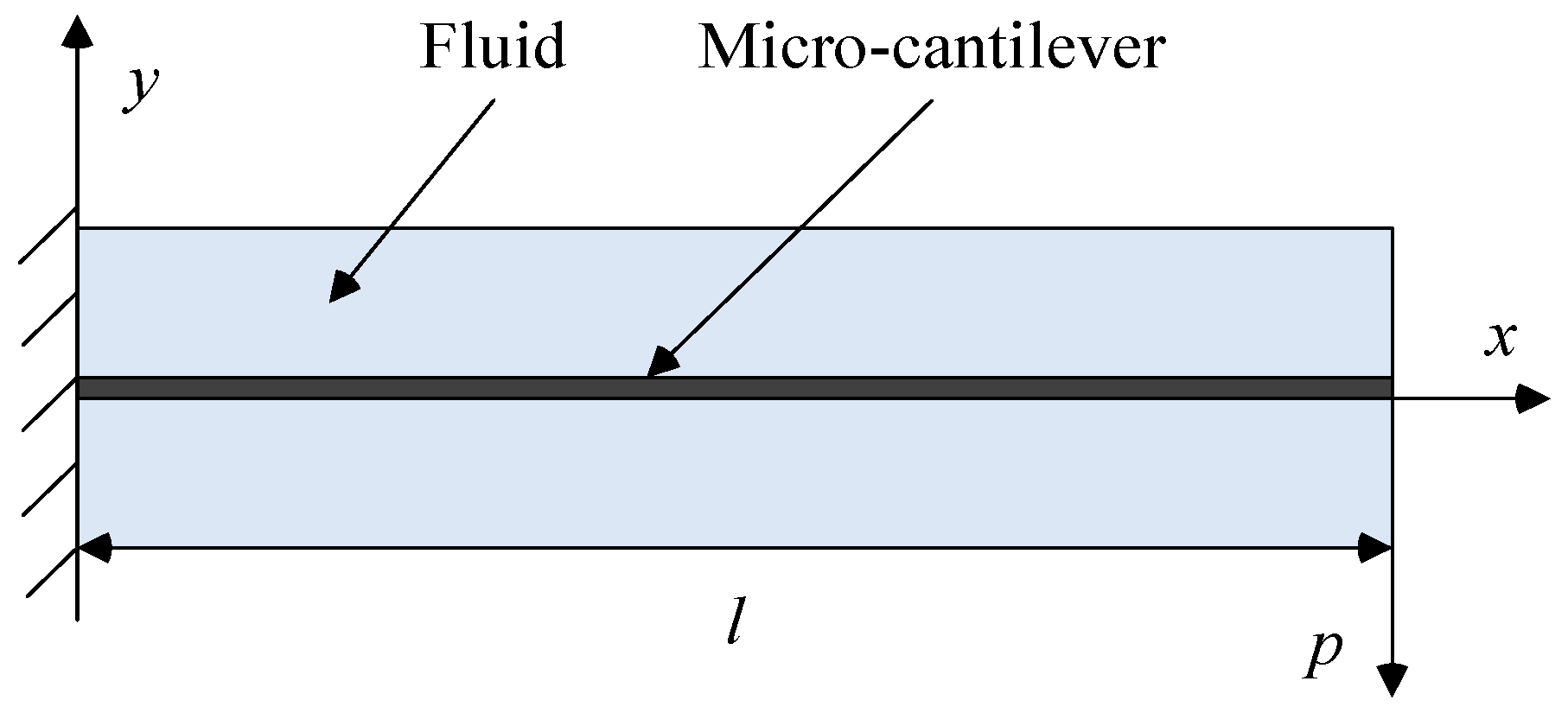
3.1. Under Flexural Nonresonant Vibration
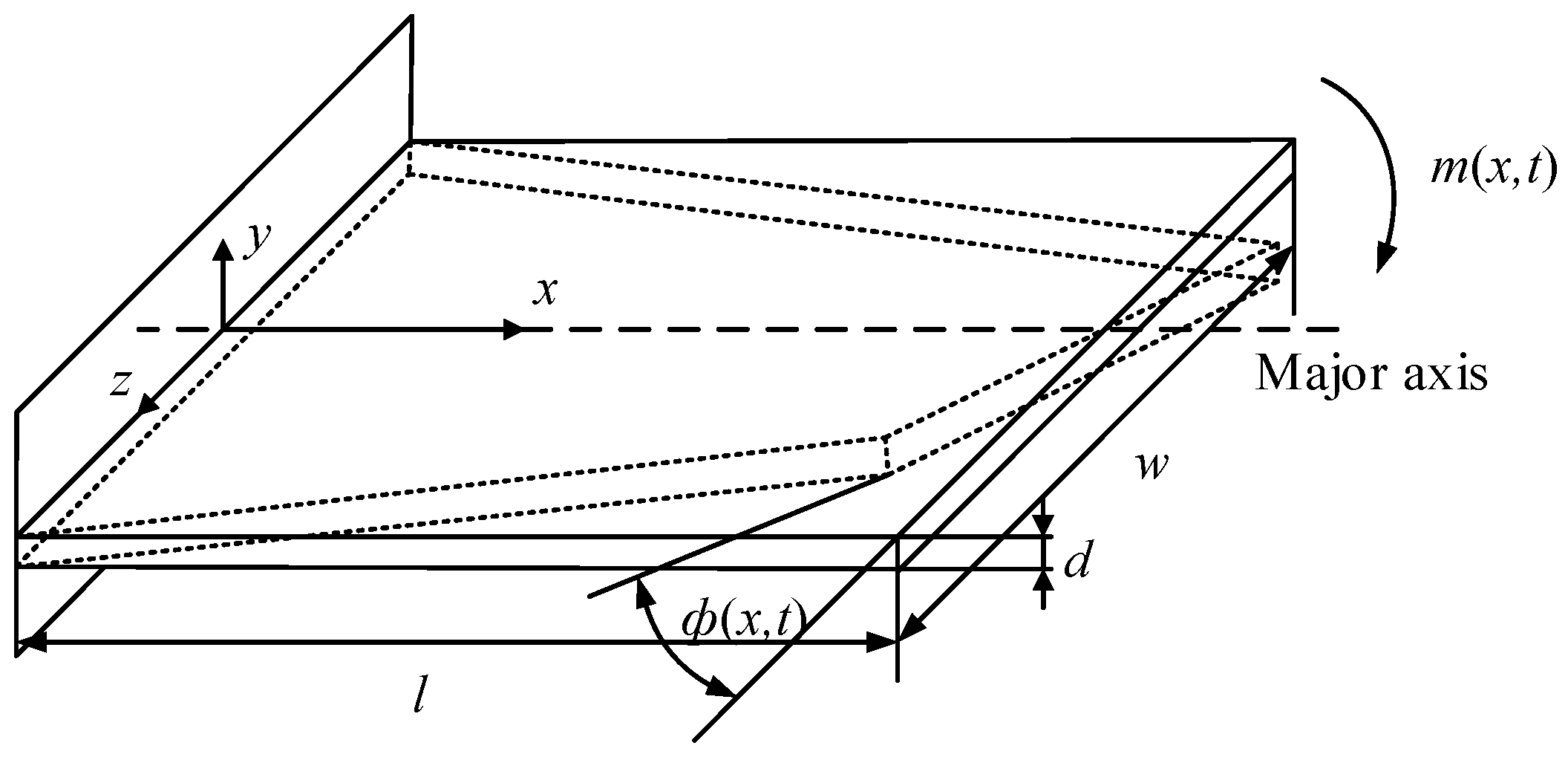
3.2. Under Torsional Nonresonant Vibration
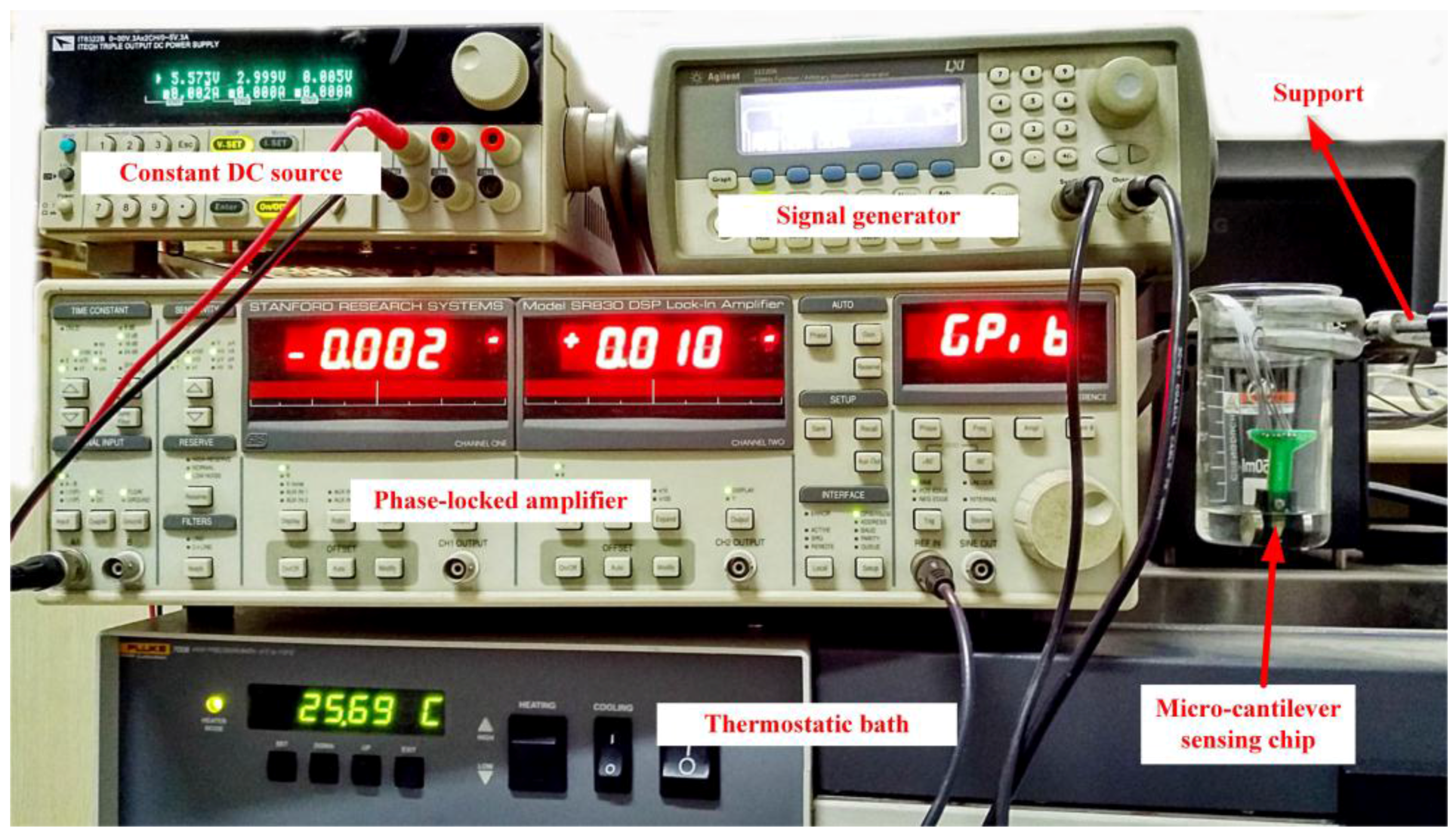
4. Experiments
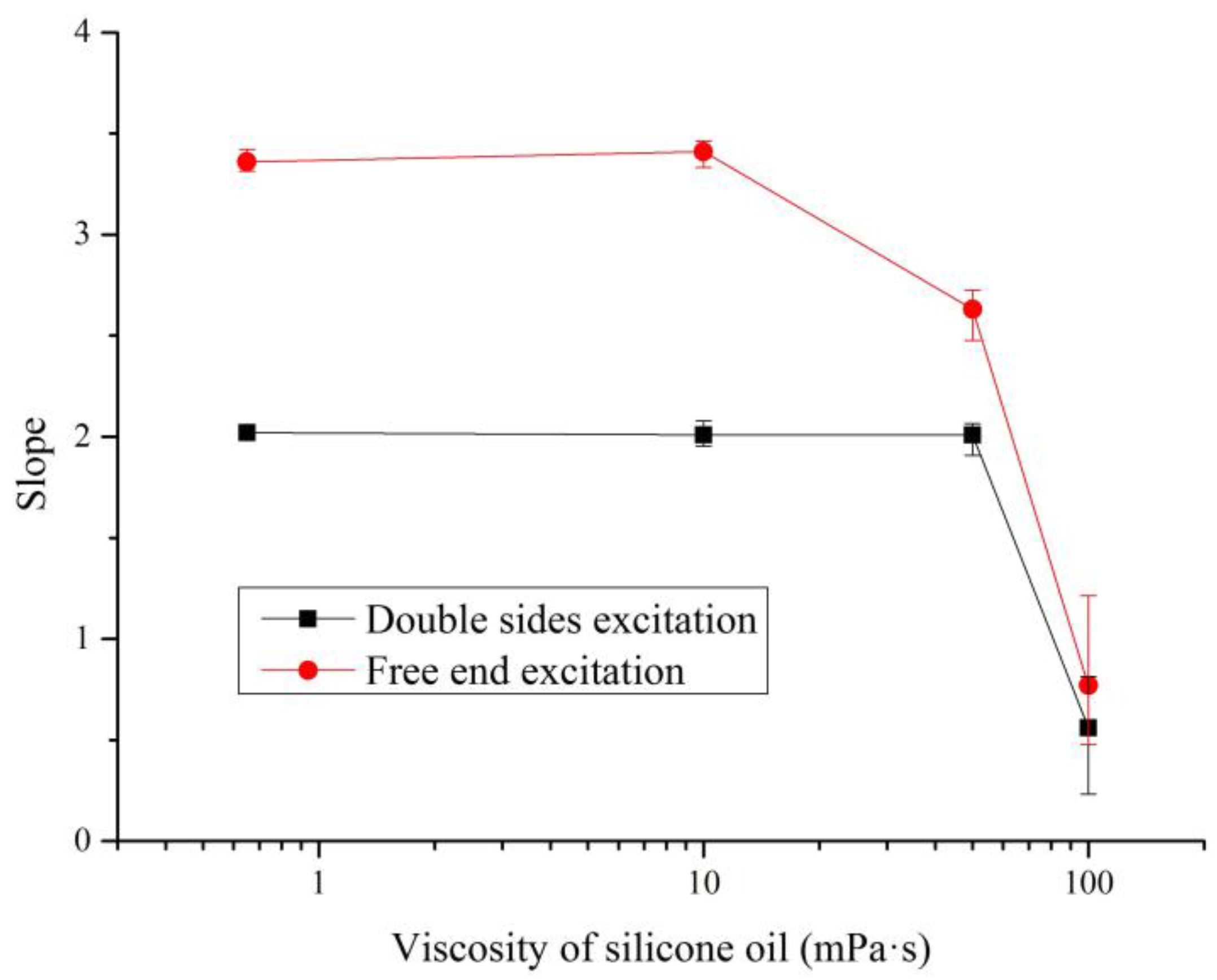
4.1. The Two Different Excitations
4.2. The Influencing Parameters for the Slope Method
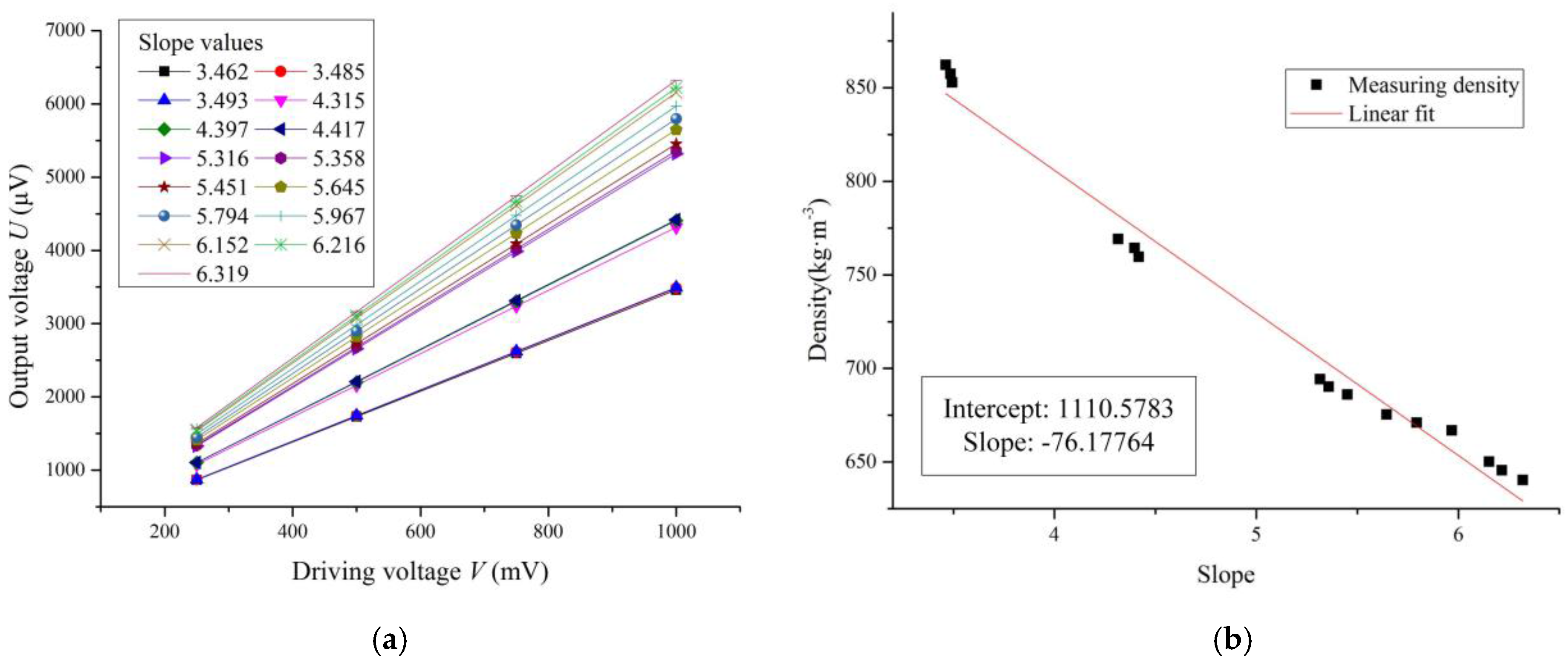
5. Results and Discussion of the Slope Method
5.1. Measuring Results of Fluid Density Under Flexural Nonresonant Vibration
5.2. Measuring Results of Fluid Density Under Torsional Nonresonant Vibration
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gruszkiewicz, M.S.; Rother, G.; Wesolowski, D.J.; Cole, D.R.; Wallacher, D. Direct measurements of pore fluid density by vibrating tube densimetry. Langmuir 2012, 28, 5070–5078. [Google Scholar] [CrossRef] [PubMed]
- Comuñas, M.J.P.; Bazile, J.P.; Baylaucq, A.; Boned, C. Density of diethyl adipate using a new vibrating tube densimeter from (293.15 to 403.15) K and up to 140 MPa. Calibration and measurements. J. Chem Eng. Data 2008, 53, 986–994. [Google Scholar]
- Sanmamed, Y.A.; González-Salgado, D.; Troncoso, J.; Cerdeiriña, C.A.; Romaní, L. Viscosity-induced errors in the density determination of room temperature ionic liquids using vibrating tube densitometry. Fluid Phase Equilib. 2007, 252, 96–102. [Google Scholar] [CrossRef]
- Khan, M.F.; Schmid, S.; Larsen, P.E.; Davis, Z.J.; Yan, W.; Stenby, E.H.; Boisen, A. Online measurement of mass density and viscosity of pL fluid samples with suspended microchannel resonator. Sens. Actuators B Chem. 2013, 185, 456–461. [Google Scholar] [CrossRef]
- Burg, T.P.; Manalis, S.R. Suspended microchannel resonators for biomolecular detection. Appl. Phys. Lett. 2003, 83, 2698–2700. [Google Scholar] [CrossRef]
- Doy, N.; McHale, G.; Newton, M.I.; Hardacre, C.; Ge, R.; Allen, R.W.; Maclnnes, J.M. Separate density and viscosity determination of room temperature ionic liquids using dual quartz crystal microbalances. In Proceedings of the 2009 IEEE Sensors Conference, Christchurch, New Zealand, 25–28 October 2009; pp. 287–290.
- Corman, T.; Enoksson, P. A low-pressure encapsulated resonant fluid density sensor with feedback control electronics. Meas. Sci. Technol. 2000, 11, 205. [Google Scholar] [CrossRef]
- Najmzadeh, M.; Haasl, S.; Enoksson, P. A silicon straight tube fluid density sensor. J. Micromech. Microeng. 2007, 17, 1657. [Google Scholar] [CrossRef]
- Saha, S.; Topkar, A.; Rathod, S.S. Study of MEMS microcantilever based on their geometric parameters. In Proceedings of the 2014 International Conference on Advanced Communication Control and Computing Technologies, Ramanathapuram, India, 8–10 May 2014; pp. 163–167.
- Wilson, T.L.; Campbell, G.A.; Mutharasan, R. Viscosity and density values from excitation level response of piezoelectric-excited cantilever sensors. Sens. Actuators A Phys. 2007, 138, 44–51. [Google Scholar] [CrossRef]
- Cakmak, O.; Ermek, E.; Kilinc, N.; Yaralioglu, G.G.; Urey, H. Precision density and viscosity measurement using two cantilevers with different widths. Sens. Actuators A Phys. 2015, 232, 141–147. [Google Scholar] [CrossRef]
- Goodwin, A.R.H. A MEMS vibrating edge supported plate for the simultaneous measurement of density and viscosity: Results for Argon, Nitrogen, and Methane at temperatures from (297 to 373) K and pressures between (1 and 62) MPa. J. Chem. Eng. Data 2008, 54, 536–541. [Google Scholar] [CrossRef]
- Cai, T.; Josse, F.; Heinrich, S.; Nigro, N.; Dufour, I.; Brand, O. Resonant characteristics of rectangular microcantilevers vibrating torsionally in viscous liquid media. In Proceedings of the 2012 IEEE International Conference on Frequency Control Symposium, Baltimore, MD, USA, 21–24 May 2012; pp. 1–6.
- Cox, R.; Zhang, J.; Josse, F.; Heinrich, S.; Dufour, I.; Beardslee, L.A.; Brand, O. Damping and mass sensitivity of laterally vibrating resonant microcantilevers in viscous liquid media. In Proceedings of the 2012 IEEE International Joint Conference on Frequency Control and the European Frequency and Time Forum, San Francisco, CA, USA, 2–5 May 2011; pp. 1–6.
- Ghatkesar, M.K.; Rakhmatullina, E.; Lang, H.P.; Gerber, C.; Hegner, M.; Braun, T. Multi-parameter microcantilever sensor for comprehensive characterization of Newtonian fluids. Sens. Actuators B Chem. 2008, 135, 133–138. [Google Scholar] [CrossRef]
- Lucklum, F.; Reichel, E.K.; Jakoby, B. Miniature density–viscosity measurement cell utilizing electrodynamic-acoustic resonator sensors. Sens. Actuators A: Phys. 2011, 172, 75–81. [Google Scholar] [CrossRef]
- Lederer, T.; Stehrer, B.P.; Bauer, S.; Jakoby, B.; Hilber, W. Utilizing a high fundamental frequency quartz crystal resonator as a biosensor in a digital microfluidic platform. Sens. Actuators A Phys. 2011, 172, 161–168. [Google Scholar] [CrossRef] [PubMed]
- Hur, D.; Lee, J.H. Determination of liquid density and viscosity using a self-actuating microcantilever. Jpn. J. Appl. Phys. 2013, 52, 056601. [Google Scholar] [CrossRef]
- Sader, J.E. Frequency response of cantilever beams immersed in viscous fluids with applications to the atomic force microscope. J. Appl. Phys. 1998, 84, 64–76. [Google Scholar] [CrossRef]
- Zhao, L.; Xu, L.; Zhang, G.; Jiang, Z.; Zhao, Y.; Wang, J.H.; Wang, X.P.; Liu, Z.G. In-situ measurement of fluid density rapidly using a vibrating piezoresistive microcantilever sensor without resonance occurring. IEEE Sens. J. 2014, 14, 645–650. [Google Scholar] [CrossRef]
- Turner, J.A.; Wiehn, J.S. Sensitivity of flexural and torsional vibration modes of atomic force microscope cantilevers to surface stiffness variations. Nanotechnology 2001, 12, 322. [Google Scholar] [CrossRef]
- Timoshenko, S.P.; Goodier, J.N. Theory of Elasticity; McGraw-Hill: New York, NY, USA, 1987. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Temperature/°C | n-Hexane | n-Heptane | Octane | Cyclohexane | Methylbenzene | |
|---|---|---|---|---|---|---|
| Density/kg·m−3 | 25 | 654.78 | 679.60 | 698.27 | 773.89 | 862.24 |
| 30 | 650.16 | 675.36 | 694.24 | 769.14 | 857.57 | |
| 35 | 645.51 | 671.10 | 690.20 | 764.37 | 852.89 | |
| Viscosity/mPa·s | 25 | 0.2963 | 0.3885 | 0.5097 | 0.8847 | 0.5526 |
| 30 | 0.2815 | 0.3675 | 0.4805 | 0.8163 | 0.4926 | |
| 35 | 0.2677 | 0.3482 | 0.4538 | 0.7553 | 0.4664 |
| Fluid | T/°C | k | ρf/kg·m−3 | Error/% |
|---|---|---|---|---|
| n-Hexane | 35 | 4.707 | 643.49532 | −0.312106711 |
| 30 | 4.662 | 650.1599727 | 0 | |
| 25 | 4.632 | 654.6750159 | −0.016033494 | |
| n-Heptane | 35 | 4.517 | 672.5382741 | 0.214315914 |
| 30 | 4.482 | 678.1568672 | 0.414129821 | |
| 25 | 4.453 | 682.8791819 | 0.482516462 | |
| Octane | 35 | 4.366 | 697.4225268 | 1.046439692 |
| 30 | 4.354 | 699.4741167 | 0.753934766 | |
| 25 | 4.323 | 704.8267749 | 0.939002807 | |
| Cyclohexane | 35 | 4.013 | 762.9017156 | −0.192090787 |
| 30 | 4.007 | 764.1143901 | −0.65340639 | |
| 25 | 3.991 | 767.3660146 | −0.843011977 | |
| Methylbenzene | 35 | 3.608 | 853.8094452 | 0.107803496 |
| 30 | 3.593 | 857.5699746 | 0 | |
| 25 | 3.565 | 864.6742986 | 0.282322624 |
| Fluid | T/°C | k | ρf/kg·m−3 | Error/% |
|---|---|---|---|---|
| n-Hexane | 35 | 6.319 | 645.8458031 | 0.052021361 |
| 30 | 6.216 | 650.1599969 | 0 | |
| 25 | 6.152 | 652.9134294 | −0.285068361 | |
| n-Heptane | 35 | 5.967 | 661.2047012 | −1.474489464 |
| 30 | 5.794 | 669.437232 | −0.876979389 | |
| 25 | 5.645 | 676.9321282 | −0.392565014 | |
| Octane | 35 | 5.451 | 687.3046269 | −0.419497695 |
| 30 | 5.358 | 692.5433549 | −0.244388847 | |
| 25 | 5.316 | 694.9693135 | −0.472694868 | |
| Cyclohexane | 35 | 4.417 | 757.9589511 | −0.838736329 |
| 30 | 4.397 | 759.6531638 | −1.233434255 | |
| 25 | 4.315 | 766.7636349 | −0.920849878 | |
| Methylbenzene | 35 | 3.493 | 856.4887907 | 0.421952502 |
| 30 | 3.485 | 857.5700016 | 0 | |
| 25 | 3.462 | 860.7063173 | −0.1778719 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Hu, Y.; Hebibul, R.; Ding, J.; Wang, T.; Xu, T.; Liu, X.; Zhao, Y.; Jiang, Z. A Novel Slope Method for Measurement of Fluid Density with a Micro-cantilever under Flexural and Torsional Vibrations. Sensors 2016, 16, 1471. https://doi.org/10.3390/s16091471
Zhao L, Hu Y, Hebibul R, Ding J, Wang T, Xu T, Liu X, Zhao Y, Jiang Z. A Novel Slope Method for Measurement of Fluid Density with a Micro-cantilever under Flexural and Torsional Vibrations. Sensors. 2016; 16(9):1471. https://doi.org/10.3390/s16091471
Chicago/Turabian StyleZhao, Libo, Yingjie Hu, Rahman Hebibul, Jianjun Ding, Tongdong Wang, Tingzhong Xu, Xixiang Liu, Yulong Zhao, and Zhuangde Jiang. 2016. "A Novel Slope Method for Measurement of Fluid Density with a Micro-cantilever under Flexural and Torsional Vibrations" Sensors 16, no. 9: 1471. https://doi.org/10.3390/s16091471
APA StyleZhao, L., Hu, Y., Hebibul, R., Ding, J., Wang, T., Xu, T., Liu, X., Zhao, Y., & Jiang, Z. (2016). A Novel Slope Method for Measurement of Fluid Density with a Micro-cantilever under Flexural and Torsional Vibrations. Sensors, 16(9), 1471. https://doi.org/10.3390/s16091471