
Stylus Tip Center Position Self-Calibration Based on Invariable Distances in Light-Pen Systems

Abstract
:1. Introduction
2. Light-Pen Coordinate Measurement System
2.1. System Structure of the LPCMM
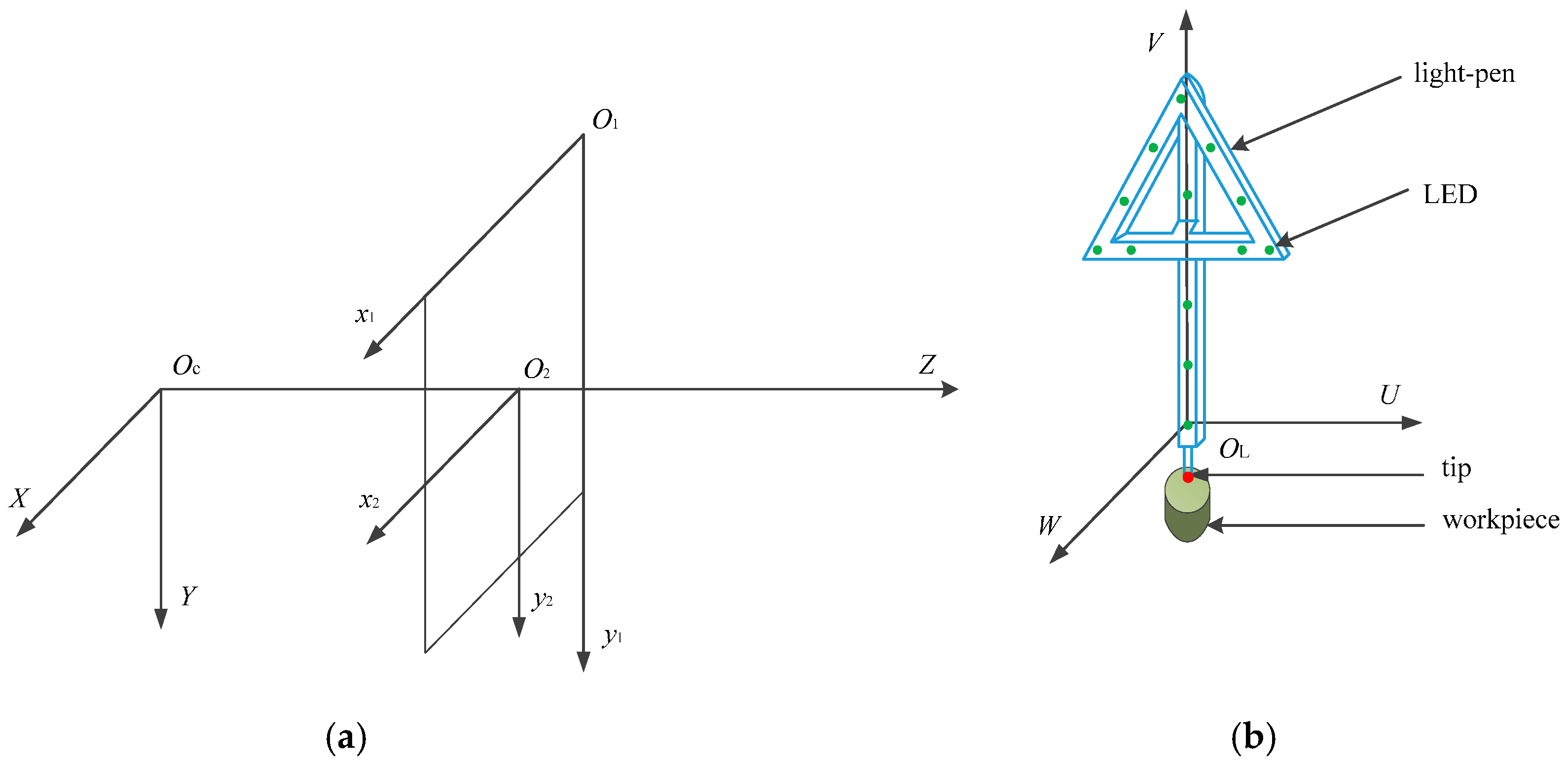
2.2. Coordinate System Establishment of the LPCMM
- (a)
- The light-pen coordinate system OL-UVW. The origin OL is set at the center of the LED 1 (marked in Figure 1). The axis U is parallel to the line connecting LEDs 8 and 11, and its positive direction is towards LED 11. The axis V, perpendicular to U, is parallel to the line linking LEDs 1 and 4, and its positive direction is towards LED 4. The axis W is set up according to the right-hand rule.
- (b)
- The pixel coordinate system O1-x1y1. The origin is placed at the up-right corner of the image plane. x1 and y1 are parallel to the horizontal and vertical pixel arrays, respectively. The orientations of x1 and y1 are built to make all coordinate values of the pixels positive.
- (c)
- The image-plane coordinate system O2-x2y2. O2 is defined at the intersection point of the optical axis of the camera with the image plane. x2 and y2 are parallel to x1 and y1, respectively.
- (d)
- The camera coordinate system OC-XYZ. OC is placed at the perspective center of the camera. X and Y are parallel to x1 and y1, respectively. Z is the optical axis of the camera with positive direction from OC to O2.
2.3. System Model of the LPCMM
3. Self-Calibration of the Tip Center Position
3.1. Establishment of the Self-Calibration Model
- (a)
- After all parameters of the matrices R and T are determined in accordance with the equations given in Section 2.3. Several images of control points are taken and determined R and T are verified by calculating the reprojection error [25,26,27] as follows:The re-projected feature points (x2i’, y2i’) (i = 1~13) are obtained from pre-calibrated (ui, vi, wi) and the calculated matrices R, T. (xij″, yij″, zij″) are defined from Equation (9) given below. j is the serial number of image. For assuring the required accuracy of calibration it is suggested to take at least seven images.It is known that the center positions of feature points can be determined more accurately when the light-pen is vertical than it is slant. When the pitch angle of the light-pen is small during the calibration, Δpj will be small. However, the variations of (xij″, yij″, zij″) will be small as well, and it will lead to large errors in solving the equations. Conversely, when the pitch angle of the light-pen is big, Δpj will be big too. So two threshold values, Q1 < Q2, should be given for Δpj to make the pitch angle of the light-pen within a suitable range and to obtain eligible parameters of the matrices R, T.
- (b)
- In OC-XYZ, the distance between the center of each LED and the tip center di (i = 1~13), and (x0, y0, z0) can be determined by solving the following equation using the nonlinear least square generalized inverse method:where (xij″, yij″, zij″) are coordinates of the center of the i-th LED in OC-XYZ system in the j-th image.
- (c)
- Because of unavoidable errors in calibration, the distance between the center of the i-th LED and the center of the probe tip cannot be the same as di calculated from Equation (9). Δdj of the j-th image is the sum of the absolute values of the differences between these two distances in the j-th image. Two threshold values Q3, Q4 are given for Δdmax, the maximum of all Δdj, and variation of Δdmax defined in Equation (10):
- (d)
- As the distances, di (i = 1~13), are invariable in both OL-UVW and OC-XYZ, all 13 equations shown in Equation (11) can be solved in the same way as in OL-UVW:
3.2. Calibration Steps
- (a)
- To process one of the image and calculate the matrices Rj, Tj from Equations (1)–(6) and then to determine (x2i’, y2i’) and (xij″, yij″, zij″) (i = 1~13, j ≥ 7) from Equations (2)–(4). To compute Δpj in Equation (8) and save the parameters of Rj, Tj if Q1 < Δpj < Q2. Otherwise ignore this photo.
- (b)
- After at least seven eligible images are obtained, 13 distances di (i = 1~13) and (x0, y0, z0) can be determined from Equation (9).
- (c)
- To calculate Δdmax from Equation (10) and remove the image in which Δdj is the biggest, and then to capture one more image and go back to step (a). After that, a new Δdmax is obtained. If this new Δdmax < Q3 and the difference between two Δdmax obtained from adjacent seven eligible photos is less than Q4, then distances di (i = 1~13) are considered as valid ones. Otherwise, similarly, to give up the image in which Δdj is the biggest, and to capture one more image and go back to step (a).
- (d)
- To determine the coordinates of the tip center in OL-UVW, (u0, v0, w0) from Equation (11) based on eligible di.
4. Experiments
4.1. Repeatability Tests of Tip Center Position Self-Calibration
4.2. Measurement Experiments of the System with the (U0, V0, W0) Self-Calibrated
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhang, G.X. Coordinate Measuring Machines; Tianjin University Press: Tianjin, China, 1999; pp. 18–27. [Google Scholar]
- Calvo, R.; D’Amato, R.; Gómez, E.; Domingo, R. Integration of error compensation of coordinate measuring machines into feature measurement: Part 1—Model development. Sensors 2016, 16, 1610. [Google Scholar] [CrossRef] [PubMed]
- Estler, W.T.; Edmundson, K.L.; Peggs, G.N.; Parker, D.H. Large-scale metrology—An update. CIRP Ann. Manuf. Technol. 2002, 51, 587–609. [Google Scholar] [CrossRef]
- Jorge, S.; David, G.; Carlos, C.; Albajez, J.A.; Aguilar, J.J. Modelling and calibration technique of laser triangulation sensors for integration in robot arms and articulated arm coordinate measuring machines. Sensors 2009, 9, 7374–7396. [Google Scholar]
- Shi, G.; Wang, W. Single laser complex method to improve the resolution of FMCW laser ranging. J. Infrared Millim. Waves 2016, 35, 363–367. [Google Scholar]
- Zhou, N.; An, Z.Y.; Li, L.J.; Zhu, Y. IGPS measurement network multi-station arrangement design. Appl. Mech. Mater. 2013, 443, 223–227. [Google Scholar] [CrossRef]
- Franceschini, F.; Maisano, D.; Mastrogiacomo, L. Mobile spatial coordinate measuring system (MSCMS) and CMMs: A structured comparison. Int. J. Adv. Manuf. Technol. 2008, 42, 1089–1102. [Google Scholar] [CrossRef]
- Wang, X.F.; Qiu, Z.R.; Yang, C.; Qian, Z.Y.; Chen, H.L. Calibration method for test sieves based on video measuring machine. J. Data Acquis. Process. 2013, 28, 257–260. [Google Scholar]
- Zhang, Z.J.; Che, R.S.; Huang, Q.C.; Shun, Y.Q. Probe imaging vision coordinate measuring system composing modeling and solving. J. Harbin Inst. Technol. 1999, 31, 69–73. [Google Scholar]
- Liu, S.G.; Peng, K.; Huang, F.S.; Zhang, G.X.; Li, P. A portable 3D vision coordinate measurement system using a light pen. Key Eng. Mater. 2005, 295–296, 331–336. [Google Scholar] [CrossRef]
- Qin, D.H. Research on the Technology and System of Portable Light Pen Coordinate Measurement System. Ph.D. Thesis, Huazhong University of Science and Technology, Wuhan, China, 2009. [Google Scholar]
- Xie, Z.X.; Han, Z.H.; Gao, X. Key technologies of monocular vision measurement system with light pen. Chin. Opt. 2013, 6, 780–787. [Google Scholar]
- Tsai, R. A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses. IEEE J. Robot. Autom. 1987, 3, 323–344. [Google Scholar] [CrossRef]
- Zhang, Z.Y. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Zhang, Z.Y. Camera calibration with one-dimensional objects. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 892–899. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.J.; Zhang, Z.X.; Zhang, J.Q. Camera calibration using 2D-dlt and bundle adjustment with planar scenes. Geomat. Inform. Sci. Wuhan Univ. 2002, 27, 566–571. [Google Scholar]
- Liu, S.G.; Jiang, Z.Z.; Dong, Y.H.; Zhang, H.L. Sub-regional camera calibration based on moving light target. Opt. Precis. Eng. 2014, 22, 259–265. [Google Scholar]
- Heikkilä, J. Geometric camera calibration using circular control points. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1066–1077. [Google Scholar] [CrossRef]
- Svoboda, T.; Martinec, D.; Pajdla, T. A convenient multicamera self-calibration for virtual environments. Presence 2006, 14, 407–422. [Google Scholar] [CrossRef]
- Alblalaihid, K.; Kinnell, P.; Lawes, S.; Desgaches, D.; Leach, R. Performance assessment of a new variable stiffness probing system for micro-CMMs. Sensors 2016, 16, 492. [Google Scholar] [CrossRef] [Green Version]
- Fu, S.; Zhang, L.Y.; Ye, N.; Zhang, W.Z.; Liu, S.L. A flexible approach to light pen calibration for a monocular-vision-based coordinate measuring system. Meas. Sci. Technol. 2014, 25, 1–8. [Google Scholar] [CrossRef]
- Liu, S.G.; Zhang, H.L.; Dong, Y.H.; Tang, S.L.; Jiang, Z.Z. Portable light pen 3D vision coordinate measuring system—Probe tip center calibration. Meas. Sci. Rev. 2013, 13, 194–199. [Google Scholar] [CrossRef]
- Zhang, R.; Liu, S.G.; Wang, H.Y. Wireless control for pointolite in light-pen CMMs. Appl. Mech. Mater. 2014, 602–605, 2217–2220. [Google Scholar] [CrossRef]
- Xu, S.L.; Ma, E.N. Commonly Used Algorithm for Assembly (C/C++ Language to Describe), 3rd ed.; Tsinghua University Press: Beijing, China, 2013; pp. 204–210. [Google Scholar]
- Gargallo, P.; Prados, E.; Sturm, P. Minimizing the reprojection error in surface reconstruction from images. In Proceedings of the IEEE the 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–20 October 2007; pp. 1–8.
- Haro, G.; Pardàs, M. Shape from incomplete silhouettes based on the reprojection error. Image Vis. Comput. 2010, 28, 1354–1368. [Google Scholar] [CrossRef]
- Rukubayihunga, A.; Didier, J.Y.; Otmane, S. Reprojection error as a new metric to detect assembly/disassembly maintenance tasks. In Proceedings of the 5th International Conference on Image Processing Theory, Tools and Applications, Orléans, France, 10–13 November 2015; pp. 513–518.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test | u0 (mm) | v0 (mm) | w0 (mm) | Photos Needed |
|---|---|---|---|---|
| 1 | −2.019 | −70.639 | −16.643 | 180 |
| 2 | −1.964 | −70.620 | −16.657 | 158 |
| 3 | −2.017 | −70.678 | −16.629 | 230 |
| 4 | −1.970 | −70.671 | −16.655 | 206 |
| 5 | −1.991 | −70.633 | −16.617 | 162 |
| 6 | −1.988 | −70.658 | −16.636 | 158 |
| 7 | −1.973 | −70.683 | −16.612 | 115 |
| 8 | −1.953 | −70.685 | −16.634 | 132 |
| 9 | −1.966 | −70.688 | −16.645 | 111 |
| 10 | −2.037 | −70.675 | −16.632 | 276 |
| Ave | −1.988 | −70.663 | −16.636 | |
| Std | 0.027 | 0.023 | 0.014 | |
| Range | 0.085 | 0.068 | 0.045 |
| Distance | Ave | Std | Range | ||||||
|---|---|---|---|---|---|---|---|---|---|
| u0 | v0 | w0 | u0 | v0 | w0 | u0 | v0 | w0 | |
| 1.2 m | −1.974 | −70.633 | −16.648 | 0.008 | 0.029 | 0.037 | 0.020 | 0.063 | 0.085 |
| 1.4 m | −1.988 | −70.663 | −16.636 | 0.027 | 0.023 | 0.014 | 0.085 | 0.068 | 0.045 |
| 1.6 m | −1.991 | −70.678 | −16.554 | 0.015 | 0.018 | 0.003 | 0.037 | 0.039 | 0.008 |
| 1.8 m | −2.011 | −70.682 | −16.559 | 0.040 | 0.015 | 0.040 | 0.094 | 0.035 | 0.098 |
| 2.0 m | −2.059 | −70.741 | −16.559 | 0.042 | 0.066 | 0.058 | 0.090 | 0.163 | 0.136 |
| Std | 0.030 | 0.035 | 0.042 | ||||||
| Range | 0.084 | 0.108 | 0.094 | ||||||
| Distance | 1.5 m | 3 m | 5 m | 7 m | 9 m |
|---|---|---|---|---|---|
| 1 | 63.595 | 63.603 | 63.550 | 63.605 | 63.427 |
| 2 | 63.633 | 63.608 | 63.658 | 63.627 | 63.338 |
| 3 | 63.636 | 63.679 | 63.582 | 63.546 | 63.324 |
| 4 | 63.602 | 63.673 | 63.474 | 63.619 | 63.744 |
| 5 | 63.616 | 63.548 | 63.584 | 63.627 | 63.625 |
| 6 | 63.576 | 63.549 | 63.629 | 63.489 | 63.562 |
| 7 | 63.594 | 63.583 | 63.588 | 63.603 | 63.486 |
| 8 | 63.584 | 63.616 | 63.560 | 63.470 | 63.489 |
| 9 | 63.590 | 63.560 | 63.516 | 63.412 | 63.553 |
| 10 | 63.617 | 63.555 | 63.619 | 63.729 | 63.355 |
| Ave | 63.604 | 63.597 | 63.576 | 63.573 | 63.490 |
| Abs | 0.083 | 0.076 | 0.055 | 0.052 | −0.031 |
| Std | 0.019 | 0.046 | 0.051 | 0.089 | 0.128 |
| Range | 0.059 | 0.131 | 0.184 | 0.317 | 0.420 |
| Distance | 1.5 m | 3 m | 5 m | 7 m | 9 m |
|---|---|---|---|---|---|
| 1 | 499.840 | 499.965 | 500.048 | 500.087 | 499.927 |
| 2 | 499.874 | 499.960 | 500.036 | 500.127 | 500.048 |
| 3 | 499.871 | 499.949 | 499.995 | 500.080 | 499.948 |
| 4 | 499.919 | 499.960 | 500.035 | 499.993 | 499.894 |
| 5 | 499.888 | 499.946 | 500.025 | 500.073 | 499.873 |
| 6 | 499.900 | 499.921 | 500.037 | 499.965 | 499.925 |
| 7 | 499.847 | 500.003 | 500.052 | 500.077 | 499.970 |
| 8 | 499.874 | 499.983 | 499.996 | 500.046 | 499.855 |
| 9 | 499.911 | 499.982 | 499.994 | 499.992 | 500.028 |
| 10 | 499.889 | 499.959 | 500.018 | 500.008 | 499.992 |
| Ave | 499.881 | 499.963 | 500.024 | 500.045 | 499.946 |
| Abs | −0.119 | −0.037 | 0.024 | 0.045 | −0.054 |
| Std | 0.024 | 0.022 | 0.021 | 0.050 | 0.061 |
| Range | 0.078 | 0.082 | 0.058 | 0.162 | 0.193 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, R.; Liu, S.; Wang, S.; Song, X. Stylus Tip Center Position Self-Calibration Based on Invariable Distances in Light-Pen Systems. Sensors 2017, 17, 131. https://doi.org/10.3390/s17010131
Zhang R, Liu S, Wang S, Song X. Stylus Tip Center Position Self-Calibration Based on Invariable Distances in Light-Pen Systems. Sensors. 2017; 17(1):131. https://doi.org/10.3390/s17010131
Chicago/Turabian StyleZhang, Rui, Shugui Liu, Sen Wang, and Xuanxiao Song. 2017. "Stylus Tip Center Position Self-Calibration Based on Invariable Distances in Light-Pen Systems" Sensors 17, no. 1: 131. https://doi.org/10.3390/s17010131
APA StyleZhang, R., Liu, S., Wang, S., & Song, X. (2017). Stylus Tip Center Position Self-Calibration Based on Invariable Distances in Light-Pen Systems. Sensors, 17(1), 131. https://doi.org/10.3390/s17010131