
Propagation Modeling and Defending of a Mobile Sensor Worm in Wireless Sensor and Actuator Networks



Abstract
:1. Introduction
- We propose a microscopic propagation model for a mobile sensor worm to describe its propagation dynamic. This model can estimate the individual state, which is distinguished from traditional global models.
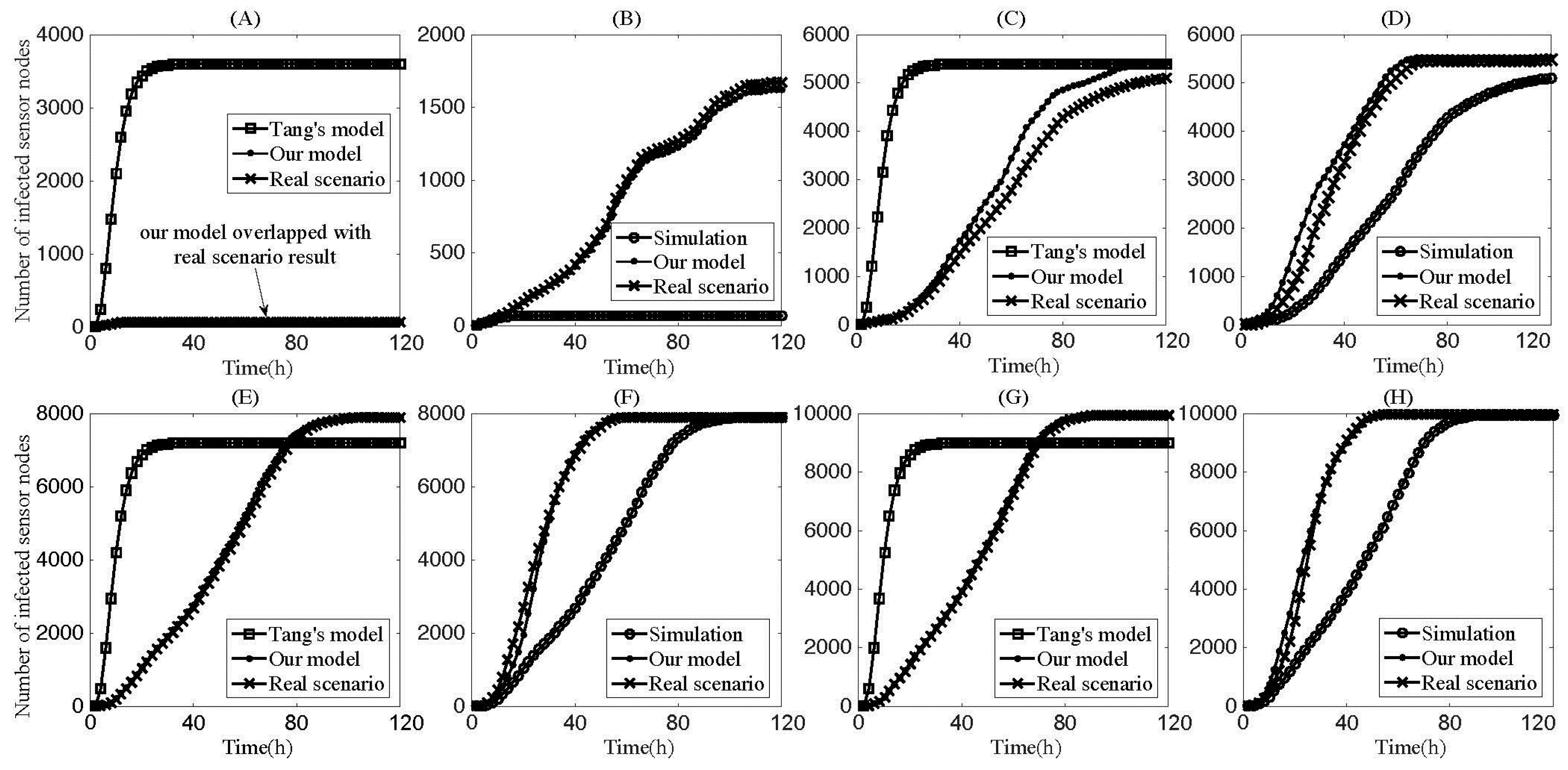
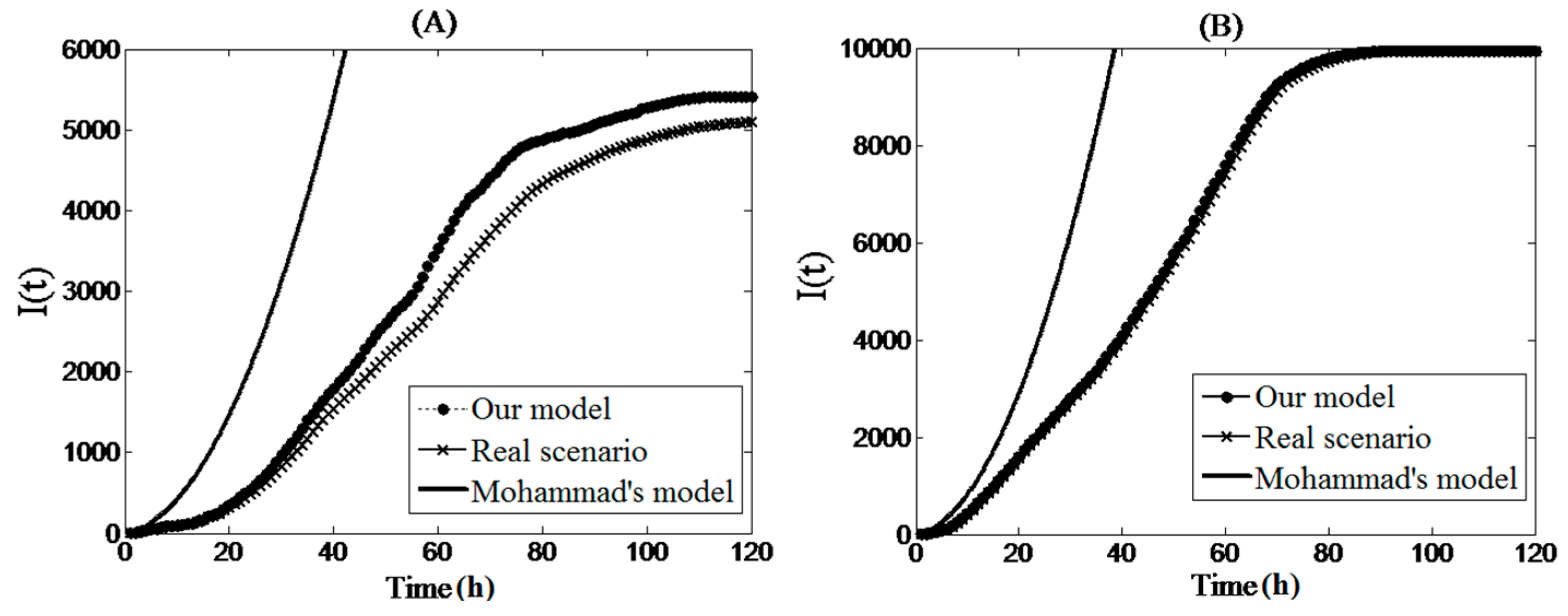
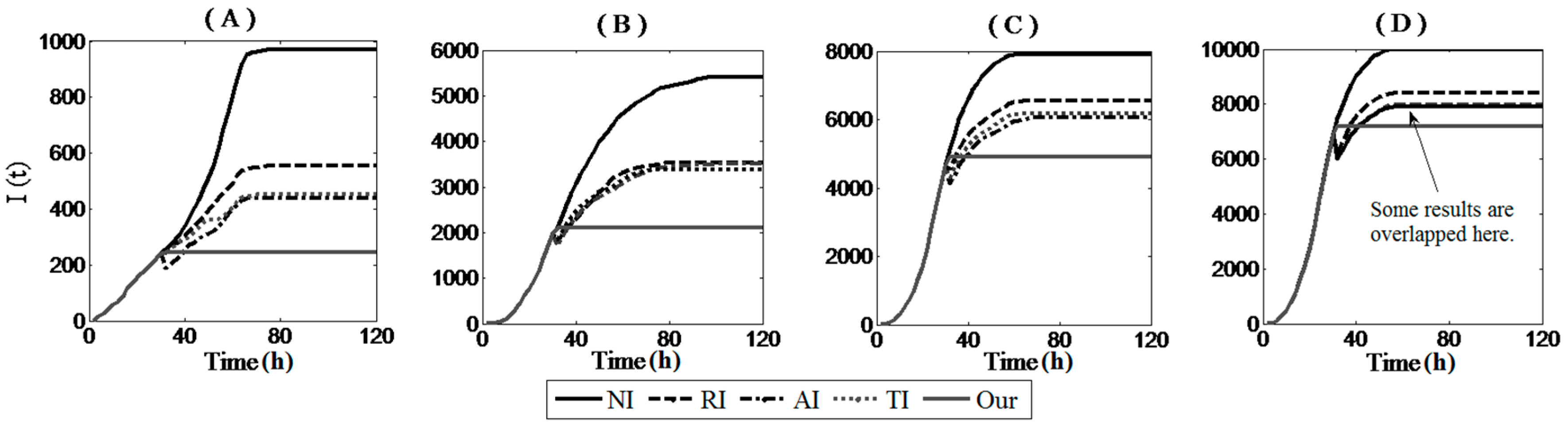
- We carry out a series of experiments to evaluate the validity of the proposed propagation model. The experiments are based on WSANs with different scales. The results show that the proposed analytical model is rather accurate compared with the real infection scenario.
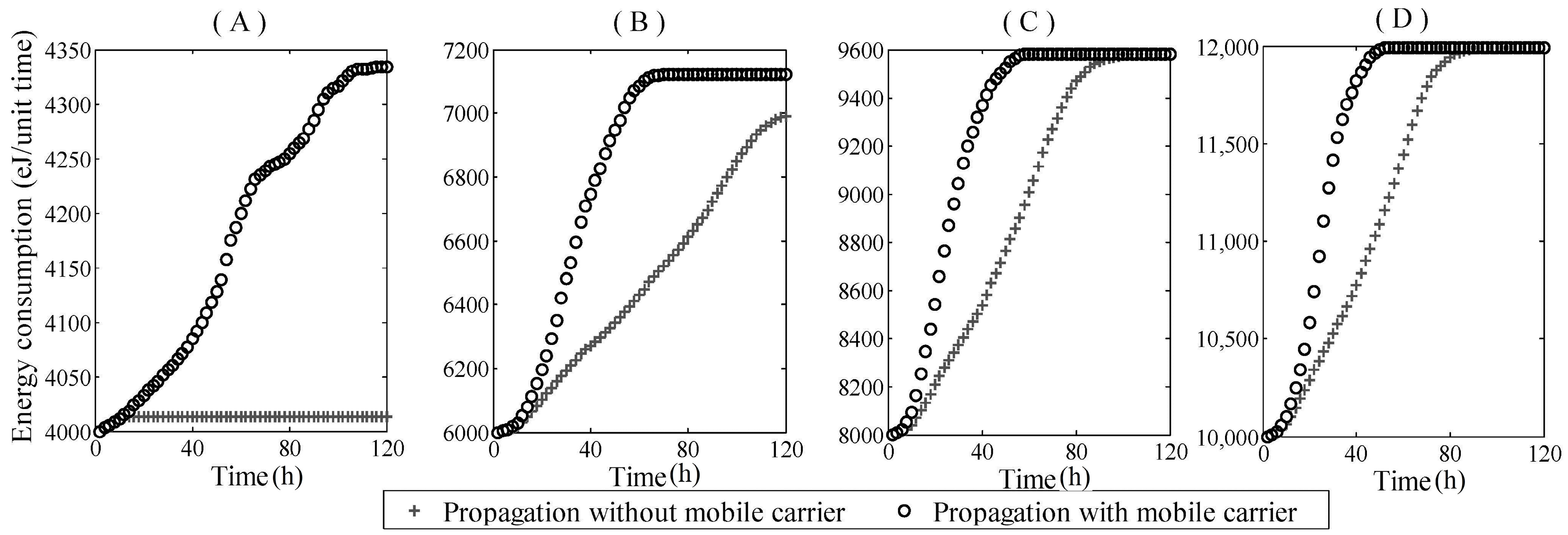
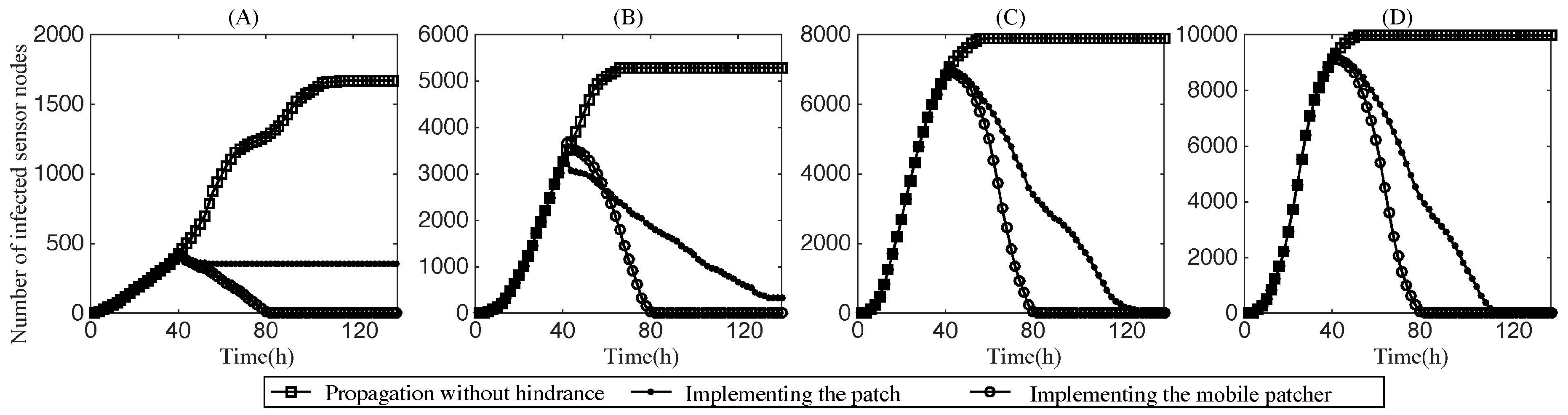
- We design a two-step local defending strategy (LDS) to defend against the mobile sensor worm efficiently. Based on the estimation of the infection boundary, we implement a mobile patcher to recover infected sensors at a low cost. Robustness and efficiency of our methods are validated through extensive analyses and experiments.
2. Related Work
2.1. Worm Attack in Networks
2.2. Sensor Worm in WSNs
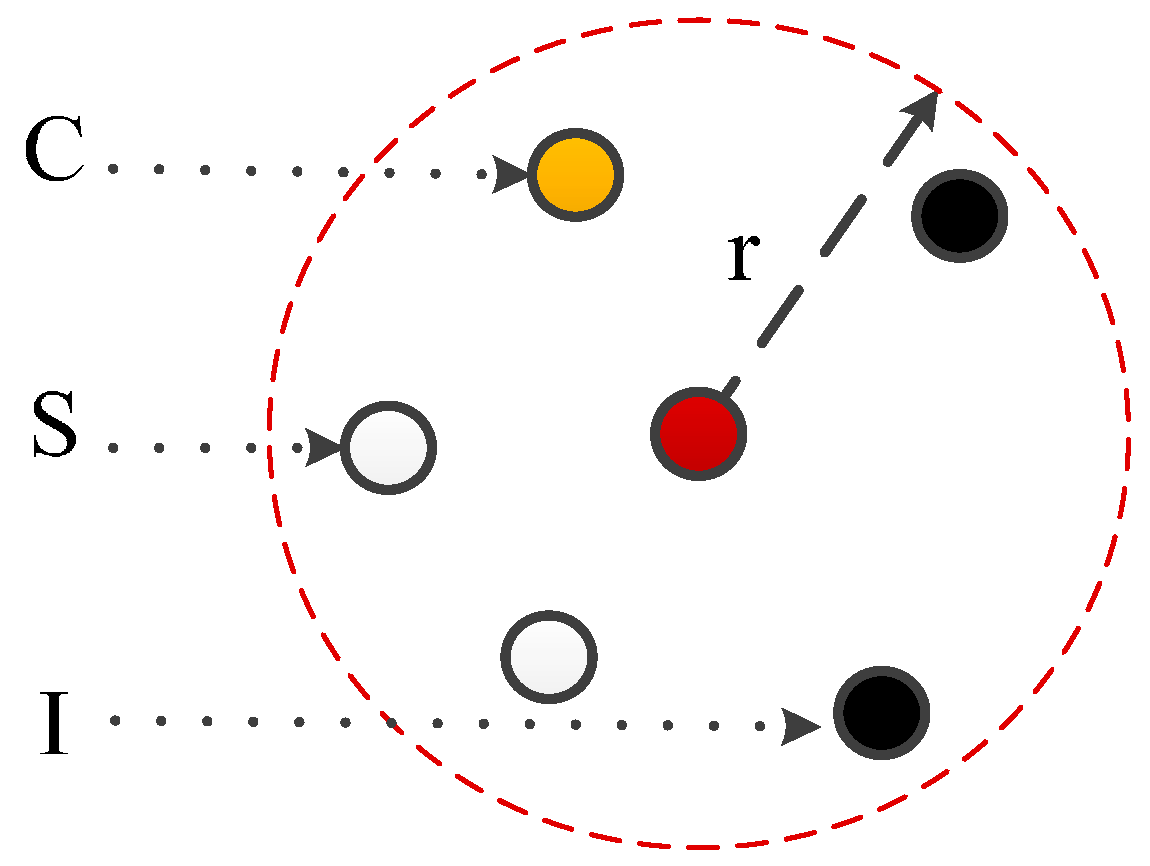
3. Preliminary Assumptions
4. Propagation Dynamic of the Mobile Sensor Worm
5. Local Area Defending Algorithm
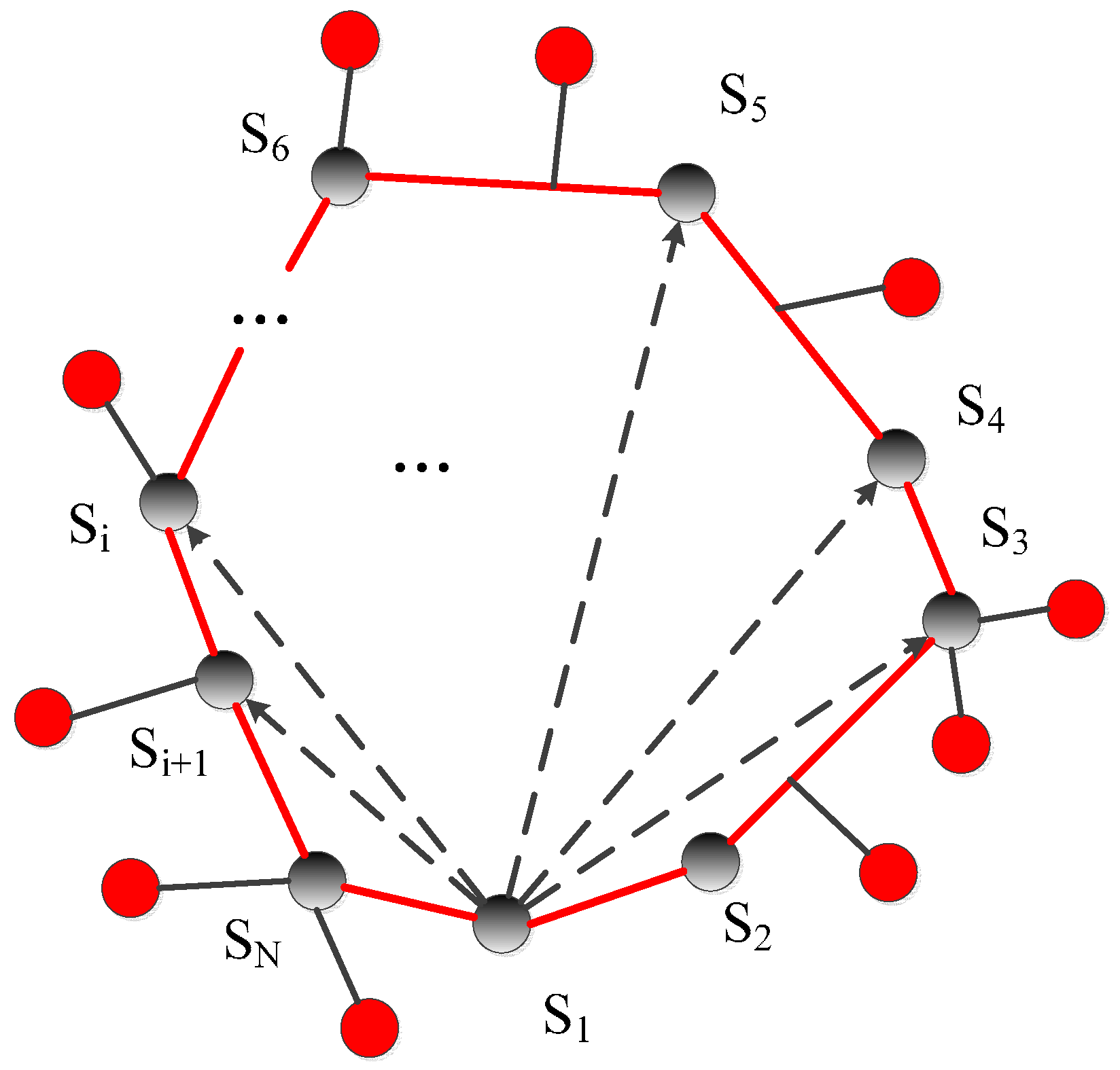
5.1. Bounding the Infected Area of the Mobile Worm
| Algorithm 1: Estimating the Geometry Boundary of Infected Area |
|
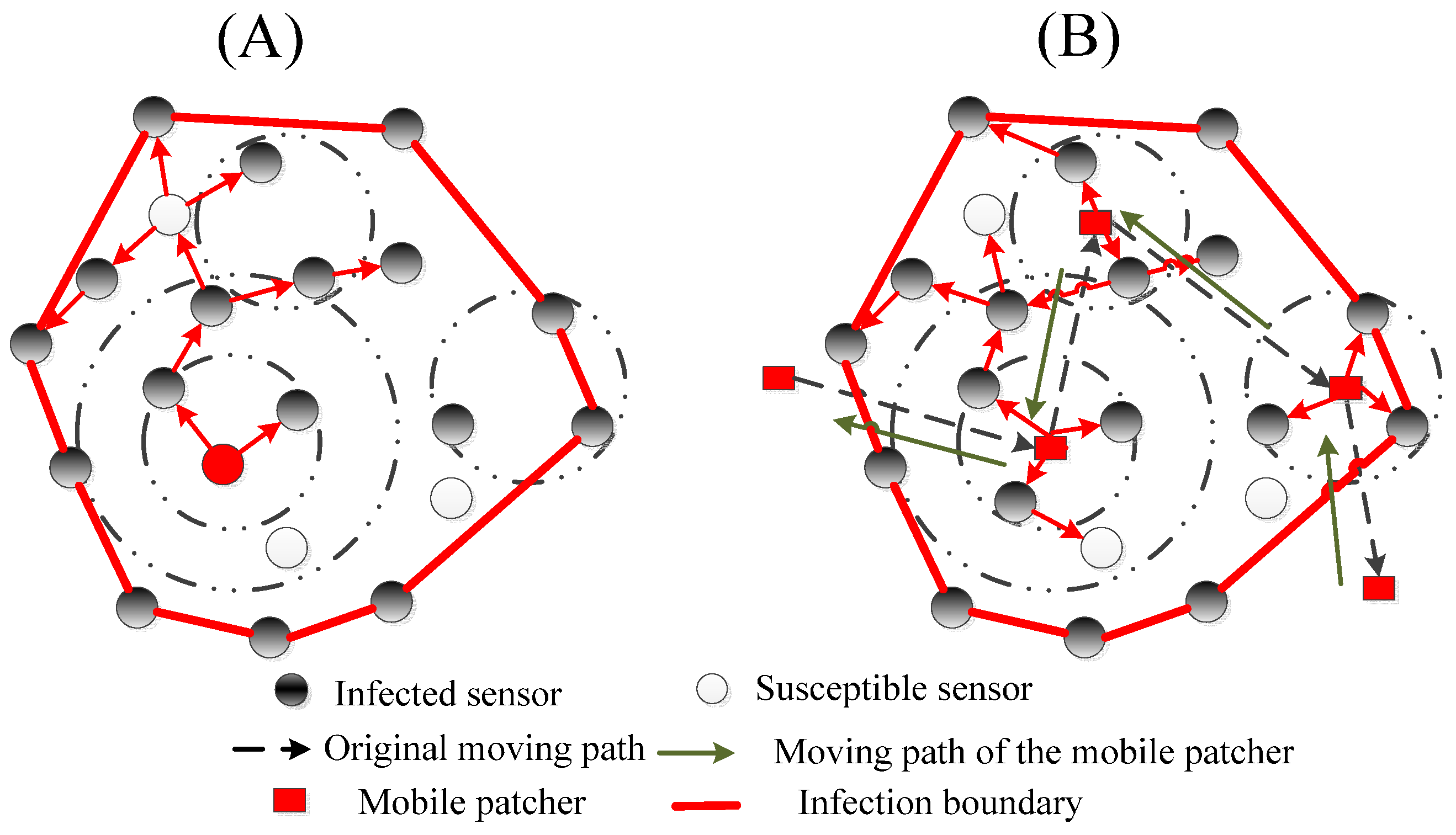
5.2. Defending the Worm with a Mobile Patcher
- STEP 1:
- Obtain the infection convex hull by Algorithm 1, then cut off all network links to the convex hull by making peripheral sensors of the convex hull sleep.
- STEP 2:
- Develop and implement the corresponding patches into the infection region to recover the infected sensor nodes.
6. Analyses
7. Experimental Evaluations
7.1. Evaluation on the Propagation Model
7.2. Evaluation on the Defending Strategy
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Srbinovska, M.; Gavrovski, C.; Dimcev, V.; Krkoleva, A.; Borozan, V. Environmental parameters monitoring in precision agriculture using wireless sensor networks. J. Clean. Prod. 2015, 88, 297–307. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, X.; Wang, B. Efficient Algorithm for K-Barrier Coverage Based on Integer Linear Programming. China Commun. 2016, 13, 16–23. [Google Scholar] [CrossRef]
- Shen, J.; Tan, H.W.; Wang, J.; Wang, J.W.; Lee, S. A Novel Routing Protocol Providing Good Transmission Reliability in Underwater Sensor Networks. J. Internet Technol. 2015, 16, 171–178. [Google Scholar]
- Wang, T.; Peng, Z.; Liang, J.; Wen, S.; Bhuiyan, M.Z.A.; Cai, Y.; Cao, J. Following Targets for Mobile Tracking in Wireless Sensor Networks. ACM Trans. Sens. Netw. 2016, 12, 31–55. [Google Scholar] [CrossRef]
- Wang, T.; Peng, Z.; Wang, C.; Cai, Y.; Chen, Y.; Tian, H.; Liang, J.; Zhong, B. Extracting target detection knowledge based on spatiotemporal information in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2016, 129, 106–118. [Google Scholar] [CrossRef]
- Yoo, S.; Kim, J.; Kim, T.; Ahn, S.; Sung, J.; Kim, D. A2S: Automated Agriculture System Based on WSN. In Proceedings of the IEEE International Symposium on Consumer Electronics, Dallas, TX, USA, 20–23 June 2007; pp. 1–5.
- Mishra, B.K.; Keshri, N. Mathematical model on the transmission of worms in wireless sensor network. Appl. Math. Model. 2013, 37, 4103–4111. [Google Scholar] [CrossRef]
- Xie, S.; Wang, Y. Construction of Tree Network with Limited Delivery Latency in Homogeneous Wireless Sensor Networks. Wirel. Pers. Commun. 2014, 78, 231–246. [Google Scholar] [CrossRef]
- Feng, L.; Song, L.; Zhao, Q.; Wang, H. Modeling and stability analysis of worm propagation in wireless sensor network. Math. Probl. Eng. 2015, 2015, 129598. [Google Scholar] [CrossRef]
- Mamun, Q.; Islam, R.; Kaosar, M. Anomaly detection in wireless sensor network. J. Netw. 2014, 9, 2914–2924. [Google Scholar] [CrossRef]
- Ho, J.-W.; Wright, M.; Das, S.K. Distributed detection of mobile malicious node attacks in wireless sensor networks. Ad Hoc Netw. 2012, 10, 512–523. [Google Scholar] [CrossRef]
- Xin, T.; Wang, R.-C.; Xing, S. Modeling and analysis of anti-worm in p2p networks. J. China Univ. Posts Telecommun. 2012, 19, 112–118. [Google Scholar]
- Aziz, A. Computer Worm Defense System and Method. U.S. Patent US8006305 B2, 23 August 2011. [Google Scholar]
- Wang, B.; Ding, P.; Sheng, J. P2P Anti-worm: Modeling and Analysis of a New Worm Counter-measurement Strategy. In Proceedings of the 9th International Conference for Young Computer Scientists, Hunan, China, 18–21 November 2008; pp. 1553–1558.
- Zhou, H.; Zhao, H. Modeling and analysis of active-benign worms and hybrid-benign worms. Comput. Res. Dev. 2007, 44, 958–964. [Google Scholar] [CrossRef]
- Weaver, N.; Ellis, D. White Worms Don’t Work. USENIX Mag. 2006, 31, 33–38. [Google Scholar]
- Giannetsos, T.; Dimitriou, T.; Prasad, N.R. Self-propagating worms in wireless sensor networks. In Proceedings of the 5th International Student Workshop on Emerging Networking Experiments and Technologies, Rome, Italy, 1–4 December 2009; pp. 31–32.
- Gu, Q.; Ferguson, C.; Noorani, R. A study of self-propagating mal-packets in sensor networks: Attacks and defenses. Comput. Secur. 2011, 30, 13–27. [Google Scholar] [CrossRef]
- Keshri, N.; Mishra, B.K. Optimal control model for attack of worms in wireless sensor network. Int. J. Grid Distrib. Comput. 2014, 7, 251–272. [Google Scholar] [CrossRef]
- Hosseini, S.; Azgomi, M.A.; Rahmani, A.T. Malware propagation modeling considering software diversity and immunization. J. Comput. Sci. 2016, 13, 49–67. [Google Scholar] [CrossRef]
- Shen, S.; Li, H.; Vasilakos, R.H.A.V.; Wang, Y.; Cao, Q. Differential game-based strategies for preventing malware propagation in wireless sensor networks. IEEE Trans. Inf. Forensics Secur. 2014, 9, 1962–1973. [Google Scholar] [CrossRef]
- Haghighi, M.S.; Wen, S.; Yang, X.; Quinn, B.; Zhou, W. On the Race of Worms and Patches: Modeling the Spread of Information in Wireless Sensor Networks. IEEE Trans. Inf. Forensics Secur. 2016, 11, 2854–2865. [Google Scholar] [CrossRef]
- Kulkarni, S.S.; Arumugam, M. Infuse: A tdma based data dissemination protocol for sensor networks. Int. J. Distrib. Sens. Netw. 2006, 2, 55–78. [Google Scholar] [CrossRef]
- Shah, V.; Modi, N. Responsive parameter based an antiworm approach to prevent wormhole attack in ad hoc networks. Int. J. Netw. Secur. 2014, 5, 1–13. [Google Scholar]
- Al-Salloum, Z.S. Defensive computer worms: an overview. Int. J. Secur. Netw. 2012, 7, 59–70. [Google Scholar] [CrossRef]
- Tang, S. A modied si epidemic model for combating virus spread in wireless sensor networks. Int. J. Wirel. Inf. Netw. 2011, 18, 319–326. [Google Scholar] [CrossRef]
- Mishra, B.K.; Srivastava, S.K.; Mishra, B.K. A quarantine model on the spreading behavior of worms in wireless sensor network. Trans. IoT Cloud Comput. 2014, 2, 1–12. [Google Scholar]
- Zou, C.C.; Towsley, D.; Gong, W. Modeling and simulation study of the propagation and defense of internet e-mail worms. IEEE Trans. Dependable Secur. Comput. 2007, 4, 105–118. [Google Scholar] [CrossRef]
- Ho, J.-W. Hop-by-hop worm propagation with carryover epidemic model in mobile sensor networks. Computers 2015, 4, 283–292. [Google Scholar] [CrossRef]
- Husted, N.; Myers, S. Why mobile-to-mobile wireless malware won’t cause a storm. In Proceedings of the LEET 2011, Boston, MA, USA, 30 March–1 April 2011.
- Valler, N.C.; Prakash, B.A.; Tong, H.; Faloutsos, M.; Faloutsos, C. Epidemic spread in mobile ad hoc networks: Determining the tipping point. In Proceedings of the 10th International IFIP TC 6 Conference on Networking, Valencia, Spain, 9–13 May 2011; pp. 266–280.
- Chen, Z.; Wang, M.; Xu, L.; Wu, W. Worm propagation model in mobile network. In Concurrency and Computation: Practice and Experience; Wiley: New York, NY, USA, 2015. [Google Scholar]
- Yang, Y.; Zhu, S.; Cao, G. Improving sensor network immunity under worm attacks: A software diversity approach. Ad Hoc Netw. 2016, 47, 26–40. [Google Scholar] [CrossRef]
- Subha, S.; Sankar, U.G. Message authentication and wormhole detection mechanism in wireless sensor network. In Proceedings of the 2015 IEEE 9th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 9–10 January 2015; pp. 1–4.
- Abdallah, W.; Boudriga, N. A location-aware authentication and key management scheme for wireless sensor networks. In Proceedings of the 2016 22nd Asia-Pacific Conference on Communications (APCC), Yogyakarta, Indonesia, 25–27 August 2016; pp. 488–495.
- Noda, B.; Omote, K.; Higashikado, Y.; Komura, M.; Mitomo, M.; Torii, S. Anti-Worm Program, Anti-Worm Apparatus, and Anti-Worm Method. U.S. Patent 8,307,445, 6 November 2012. [Google Scholar]
- Newman, M. Networks: An Introduction; Oxford University Press: Oxford, UK, 2010. [Google Scholar]
- Wen, S.; Zhou, W.; Zhang, J.; Xiang, Y.; Zhou, W.; Jia, W.; Zou, C.C. Modeling and analysis on the propagation dynamics of modern email malware. IEEE Trans. Dependable Secure Comput. 2014, 11, 361–374. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter (Unit Symbol) | Value | Parameter (Unit Symbol) | Value |
|---|---|---|---|
| The number of sensors N | 4000–10,000 | Infection delay α (min) | 1 |
| The measure of area S (m2) | 300 × 300 | The locations of the actuator when it is infected (x0, y0) | (150, 150) |
| Communication radius r (m) | 5 | Infection rate β | 0.9 |
| Direction delay of actuator τ (min) | 2 | The time of mobile diffusion t (min) | 0~120 |
| Moving speed of actuator v (m/s) | 1 | —— | —— |
| Attributes | Number of Links | Average Degree | Max Degree | Number of Independent Nodes | |
|---|---|---|---|---|---|
| Network Size | |||||
| 4000 | 14,030 | 3.51 | 13 | 126 | |
| 6000 | 31,780 | 5.30 | 15 | 38 | |
| 8000 | 56,232 | 7.03 | 19 | 9 | |
| 10,000 | 88,360 | 8.836 | 22 | 4 | |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, T.; Wu, Q.; Wen, S.; Cai, Y.; Tian, H.; Chen, Y.; Wang, B. Propagation Modeling and Defending of a Mobile Sensor Worm in Wireless Sensor and Actuator Networks. Sensors 2017, 17, 139. https://doi.org/10.3390/s17010139
Wang T, Wu Q, Wen S, Cai Y, Tian H, Chen Y, Wang B. Propagation Modeling and Defending of a Mobile Sensor Worm in Wireless Sensor and Actuator Networks. Sensors. 2017; 17(1):139. https://doi.org/10.3390/s17010139
Chicago/Turabian StyleWang, Tian, Qun Wu, Sheng Wen, Yiqiao Cai, Hui Tian, Yonghong Chen, and Baowei Wang. 2017. "Propagation Modeling and Defending of a Mobile Sensor Worm in Wireless Sensor and Actuator Networks" Sensors 17, no. 1: 139. https://doi.org/10.3390/s17010139
APA StyleWang, T., Wu, Q., Wen, S., Cai, Y., Tian, H., Chen, Y., & Wang, B. (2017). Propagation Modeling and Defending of a Mobile Sensor Worm in Wireless Sensor and Actuator Networks. Sensors, 17(1), 139. https://doi.org/10.3390/s17010139