
Comparison of Orbit-Based and Time-Offset-Based Geometric Correction Models for SAR Satellite Imagery Based on Error Simulation


Abstract
:1. Introduction
2. Error Sources for Geolocation Accuracy
2.1. Systematic Effects
2.2. Geodynamic Effects
3. Geometric Correction Model
- The geometric correction model based on the orbit information errors parameterized by of the Equation (3).
- The geometric correction model based on the time-offset parameters: the drift in the spacecraft clock and the signal delay parameterized by of the Equation (6), and of Equations (7) and (8), respectively.
4. Experiments and Results
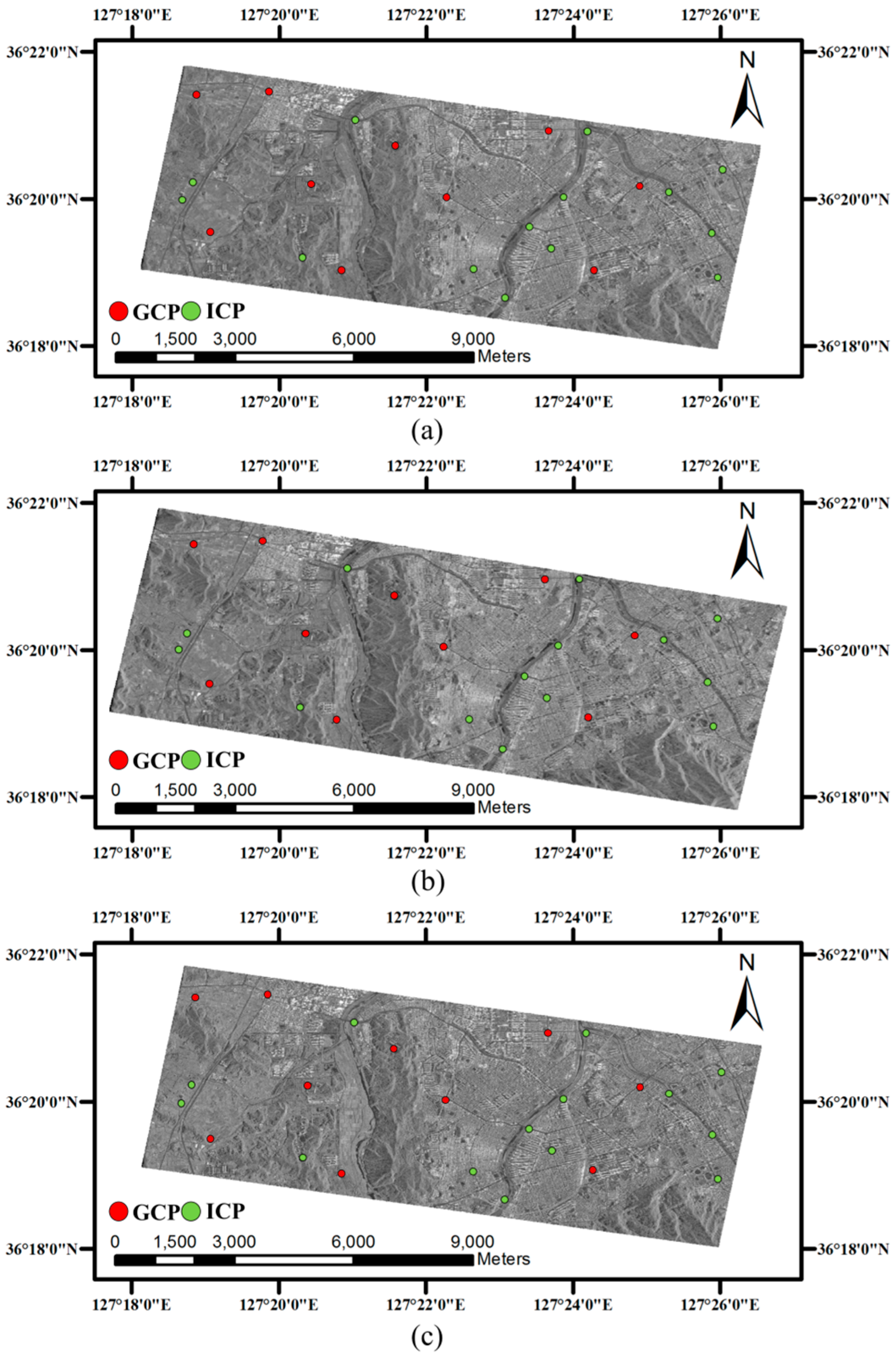
4.1. Datasets
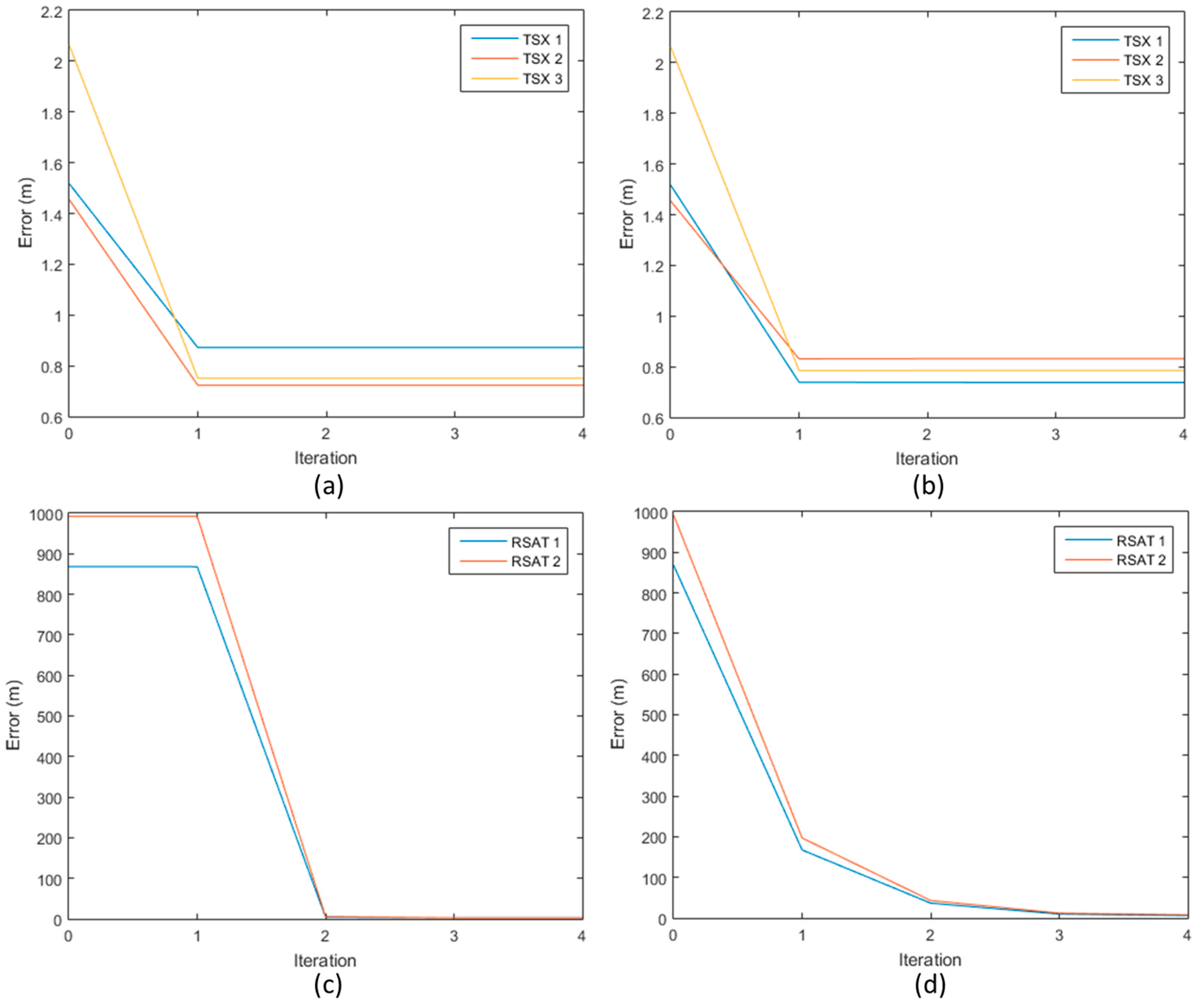
4.2. Geometric Correction Results
5. Error Simulation and Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Song, Y.-S.; Sohn, H.-G.; Park, C.-H. Efficient water area classification using radarsat-1 SAR imagery in a high relief mountainous environment. Photogramm. Eng. Remote Sens. 2007, 73, 285–296. [Google Scholar] [CrossRef]
- Hong, S.; Jang, H.; Kim, N.; Sohn, H.-G. Water area extraction using radarsat SAR imagery combined with landsat imagery and terrain information. Sensors 2015, 15, 6652–6667. [Google Scholar] [CrossRef] [PubMed]
- Akbari, V.; Doulgeris, A.P.; Eltoft, T. Monitoring glacier changes using multitemporal multipolarization SAR images. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3729–3741. [Google Scholar] [CrossRef]
- Kim, J.-W.; Lu, Z.; Jones, J.W.; Shum, C.; Lee, H.; Jia, Y. Monitoring everglades freshwater marsh water level using L-band synthetic aperture radar backscatter. Remote Sens. Environ. 2014, 150, 66–81. [Google Scholar] [CrossRef]
- Yuan, T.; Lee, H.; Jung, H.C. Toward estimating wetland water level changes based on hydrological sensitivity analysis of palsar backscattering coefficients over different vegetation fields. Remote Sens. 2015, 7, 3153–3183. [Google Scholar] [CrossRef]
- Toutin, T.; Gray, L. State-of-the-art of elevation extraction from satellite SAR data. ISPRS J. Photogramm. Remote Sens. 2000, 55, 13–33. [Google Scholar] [CrossRef]
- Crosetto, M. Calibration and validation of SAR interferometry for dem generation. ISPRS J. Photogramm. Remote Sens. 2002, 57, 213–227. [Google Scholar] [CrossRef]
- Breit, H.; Fritz, T.; Balss, U.; Lachaise, M.; Niedermeier, A.; Vonavka, M. Terrasar-x SAR processing and products. IEEE Trans. Geosci. Remote Sens. 2010, 48, 727–740. [Google Scholar] [CrossRef]
- DLR. Terrasar-x: Ground Segment: Basic Product Specification Document (tx-gs-dd-3302). Available online: http://www.dlr.de/PortalData/1/Resources/raumfahrt/weltraum/TX-GS-DD-3302_Basic-Product-Specification-Document_1.5.pdf (accessed on 15 January 2016).
- Eineder, M.; Minet, C.; Steigenberger, P.; Cong, X.; Fritz, T. Imaging geodesy—Toward centimeter-level ranging accuracy with terrasar-x. IEEE Trans. Geosci. Remote Sens. 2011, 49, 661–671. [Google Scholar] [CrossRef]
- Frey, O.; Meier, E.; Nüesch, D.; Roth, A. Geometric error budget analysis for terrasar-x. In Proceedings of the 5th European Conference on Synthetic Aperture Radar EUSAR, 2004; VDE-Verlag: Berlin, Germany, 2004; pp. 513–516. [Google Scholar]
- Hwang, Y.; Lee, B.-S.; Kim, Y.-R.; Roh, K.-M.; Jung, O.-C.; Kim, H. Gps-based orbit determination for kompsat-5 satellite. ETRI J. 2011, 33, 487–496. [Google Scholar] [CrossRef]
- Yoon, J.; Keum, J.; Shin, J.; Kim, J.; Lee, S.; Bauleo, A.; Farina, C.; Germani, C.; Mappini, M.; Venturini, R. Kompsat-5 SAR design and performance. In Proceedings of the 2011 3rd International Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Seoul, Korea, 26–30 September 2011.
- Yoon, Y.T.; Eineder, M.; Yague-Martinez, N.; Montenbruck, O. Terrasar-x precise trajectory estimation and quality assessment. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1859–1868. [Google Scholar] [CrossRef]
- Curlander, J.C. Utilization of spaceborne SAR datafor mapping. IEEE Trans. Geosci. Remote Sens. 1984, GE-22, 106–112. [Google Scholar] [CrossRef]
- Curlander, J.C.; McDonough, R.N. Synthetic Aperture Radar: Systems and Signal Processing; John Wiley & Sons, Inc.: New York, NY, USA, 1991. [Google Scholar]
- Schreier, G. SAR Geocoding: Data and Systems; Wichmann: Karlsruhe, Germary, 1993; pp. 160–170. [Google Scholar]
- Toutin, T. Review article: Geometric processing of remote sensing images: Models, algorithms and methods. Int. J. Remote Sens. 2004, 25, 1893–1924. [Google Scholar] [CrossRef]
- Schwerdt, M.; Bräutigam, B.; Bachmann, M.; Döring, B.; Schrank, D.; Gonzalez, J.H. Final terrasar-x calibration results based on novel efficient methods. IEEE Trans. Geosci. Remote Sens. 2010, 48, 677–689. [Google Scholar] [CrossRef]
- Srivastava, S.; Banik, B.; Le Dantec, P.; Hawkins, R.; Murnaghan, K. Radarsat-1 Image Quality—A Mission Success. In Proceedings of the CEOS SAR Workshop, Tokyo, Japan, 2–5 April 2001.
- Toutin, T. Path processing and block adjustment with radarsat-1 SAR images. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2320–2328. [Google Scholar] [CrossRef]
- Chen, P.-H.; Dowman, I.J. A weighted least squares solution for space intersection of spaceborne stereo SAR data. IEEE Trans. Geosci. Remote Sens. 2001, 39, 233–240. [Google Scholar] [CrossRef]
- Olmsted, C. Alaska SAR Facility Scientific SAR User’s Guide; ASF-SD-003; Geophysical Institite, University of Alaska Fairbanks: Fairbanks, AK, USA, 1993. [Google Scholar]
- Vassilaki, D.; Stamos, A. Interpolating accurate terrasar-x science orbit data. In Proceedings of the EARSeL 34th Symposium, Warsaw, Poland, 16–20 June 2014; Volume 2, pp. 54–62.
- Schubert, A.; Jehle, M.; Small, D.; Meier, E. Mitigation of atmospheric perturbations and solid earth movements in a terrasar-x time-series. J. Geod. 2012, 86, 257–270. [Google Scholar] [CrossRef]
- Hong, S.H.; Sohn, H.G.; Kim, S.P.; Jang, H.S. Error budget analysis for geolocation accuracy of high resolution SAR satellite imagery. J. Korean Soc. Surv. Geod. Photogramm. Cartogr. 2013, 31, 447–454. [Google Scholar] [CrossRef]
- Schubert, A.; Jehle, M.; Small, D.; Meier, E. Influence of atmospheric path delay on the absolute geolocation accuracy of terrasar-x high-resolution products. IEEE Trans. Geosci. Remote Sens. 2010, 48, 751–758. [Google Scholar] [CrossRef] [Green Version]
- Mikhail, E.M.; Ackermann, F.E. Observations and Least Squares; IEP Don-Donnelley: New York, NY, USA; Hagerstown, MD, USA; San Francisco, CA, USA; London, UK, 1976. [Google Scholar]
- Smith, A. Near real-time geocoding of SAR imagery with orbit error removal. Int. J. Remote Sens. 2003, 24, 5219–5228. [Google Scholar] [CrossRef]
- Cote, S.; Muir, S.; Srivastava, S.; Hawkins, R. SAR image quality and calibration operations for the radarsat satellites at the canadian space agency. In Proceedings of the 2009 International Radar Conference Surveillance for a Safer World (RADAR 2009), Bordeaux, France, 12–16 October 2009; pp. 1–6.
- Srivastava, S.; Banik, B.; Adamovic, M.; Gray, R.; Hawkins, R.; Lukowski, T.; Jefferies, W. Radarsat-1 image quality—Update. In Proceedings of a SAR Workshop, Toulouse, France, 26–29 October 1999; p. 85.
- International, R. Radarsat-1 Data Products Specifications (rsi-gs-026). Available online: http://gs.mdacorporation.com/includes/documents/R1_PROD_SPEC.pdf (accessed on 15 January 2016).
- Shimada, M.; Isoguchi, O.; Tadono, T.; Isono, K. Palsar radiometric and geometric calibration. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3915–3932. [Google Scholar] [CrossRef]
- Eineder, M.; Breit, H.; Adam, N.; Holzner, J.; Suchandt, S.; Rabus, B. Srtm x-SAR calibration results. In Proceedings of the IEEE 2011 International Geoscience and Remote Sensing Symposium (IGARSS’01), Sydney, NSW, Australia, 9–13 July 2001; pp. 748–750.
- Jehle, M.; Small, D.; Meier, E.; Nüesch, D. Improved knowledge of SAR geometry through atmospheric modelling. In Proceedings of the 5th European Conference on Synthetic Aperture Radar EUSAR; VDE-Verlag: Berlin, Germany, 2004; pp. 25–27. [Google Scholar]
- Jehle, M.; Perler, D.; Small, D.; Schubert, A.; Meier, E. Estimation of atmospheric path delays in terrasar-x data using models vs. Measurements. Sensors 2008, 8, 8479–8491. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2001; Volume 2. [Google Scholar]
- Davies, K. Ionospheric Radio; Peter Peregrinus Ltd., IEE Electromagnetic Waves: London, UK, 1990. [Google Scholar]
- Xu, Z.-W.; Wu, J.; Wu, Z.-S. A survey of ionospheric effects on space-based radar. Waves Random Med. 2004, 14, S189–S274. [Google Scholar] [CrossRef]
- Rignot, E.J. Effect of faraday rotation on L-band interferometric and polarimetric synthetic-aperture radar data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 383–390. [Google Scholar] [CrossRef]
- Mateus, P.; Nico, G.; Tomé, R.; Catalao, J.; Miranda, P.M. Experimental study on the atmospheric delay based on GPS, SAR interferometry, and numerical weather model data. IEEE Trans. Geosc. Remote Sens. 2013, 51, 6–11. [Google Scholar] [CrossRef]
- Ding, X.-L.; Li, Z.-W.; Zhu, J.-J.; Feng, G.-C.; Long, J.-P. Atmospheric effects on inSAR measurements and their mitigation. Sensors 2008, 8, 5426–5448. [Google Scholar] [CrossRef] [PubMed]
- Melchior, P. Earth tides. Geophys. Surv. 1974, 1, 275–303. [Google Scholar] [CrossRef]
- Milbert, D. Solid Earth Tide. GPS Software Index Page. Available online: http://home.comcast.net/~dmilbert/softs/solid.htm (accessed on 16 January 2017).
- Penna, N.T.; Bos, M.S.; Baker, T.F.; Scherneck, H.-G. Assessing the accuracy of predicted ocean tide loading displacement values. J. Geod. 2008, 82, 893–907. [Google Scholar] [CrossRef]
- Song, Y.-S. Flooded Area Analysis Using Remotely Sensed Data and Gsis in Mountainous Area. Ph.D. Thesis, Yonsei University, Seoul, Korea, 2005. [Google Scholar]
- Wivell, C.E.; Steinwand, D.R.; Kelly, G.G.; Meyer, D.J. Evaluation of terrain models for the geocoding and terrain correction, of synthetic aperture radar (SAR) images. IEEE Trans. Geosci. Remote Sens. 1992, 30, 1137–1144. [Google Scholar] [CrossRef]
- Song, Y.-S.; Sohn, H.-G.; Park, C.-H. An efficient 3-D positioning method from satellite synthetic aperture radar images. In Knowledge-Based Intelligent Information and Engineering Systems; Springer: New York, NY, USA, 2006; pp. 533–540. [Google Scholar]
- Loew, A.; Mauser, W. Generation of geometrically and radiometrically terrain corrected SAR image products. Remote Sens. Environ. 2007, 106, 337–349. [Google Scholar] [CrossRef]
- Ghilani, C.D. Adjustment Computations: Spatial Data Analysis; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2010. [Google Scholar]
- National Geographic Information Institute. Production and Dissemination of National Map. Available online: http://www.ngii.go.kr/en/contents/contentsView.do?rbsIdx=58 (accessed on 1 Apirl 2016).




{kind=link}
{kind=link}
{kind=link}
| TSX 1 | TSX 2 | TSX 3 | |
|---|---|---|---|
| Imaging Mode | SpotLight | SpotLight | SpotLight |
| Orbit direction | Descending | Descending | Descending |
| Look Direction | Right | Right | Right |
| Acquisition Date | 4 April 2009 | 9 April 2009 | 23 July 2009 |
| Incidence angle | 39.63° | 22.25° | 39.63° |
| Wavelength | 0.031 m (X-band) | 0.031 m (X-band) | 0.031 m (X-band) |
| PRF | 8201.417 Hz | 8201.419 Hz | 8201.391 Hz |
| Projected spacing (Azimuth/Range) | 0.86 m × 0.91 m | 0.86 m × 0.45 m | 0.86 m × 0.91 m |
| Image size (Azimuth/Range) | 6041 × 8352 | 6010 × 10,848 | 5988 × 8352 |
| RSAT 1 | RSAT 2 | |
|---|---|---|
| Imaging Mode | Fine | Fine |
| Orbit direction | Descending | Descending |
| Look Direction | Right | Right |
| Acquisition Date | 3 August 2005 | 27 August 2005 |
| Incidence angle | 38.97° | 38.96° |
| Wavelength | 0.056 m (C-band) | 0.056 m (C-band) |
| PRF | 1291.340 Hz | 1291.031 Hz |
| Projected spacing (Azimuth/Range) | 6.25 m × 6.25 m | 6.25 m × 6.25 m |
| Image size (Azimuth/Range) | 10,006 × 9036 | 10,008 × 9039 |
| SAR Imagery | Before Geometric Correction (m) | After Geometric Correction Based on Orbit Parameters (m) | After Geometric Correction Based on Time-Offset Parameters (m) | |||||
|---|---|---|---|---|---|---|---|---|
| ICP Errors (Azimuth, Range) | ICP RMS Errors | GCP RMS Residuals | ICP Errors (Azimuth, Range) | ICP RMS Errors | GCP RMS Residuals | ICP Errors (Azimuth, Range) | ICP RMS Errors | |
| TSX 1 | −0.47, 1.19 | 1.43 | 0.29 | −0.06, 0.41 | 0.87 | 0.56 | −0.04, 0.12 | 0.74 |
| TSX 2 | −0.83, 0.98 | 1.48 | 0.42 | 0.16, 0.04 | 0.72 | 0.63 | 0.06, −0.21 | 0.83 |
| TSX 3 | −0.59, 1.73 | 1.95 | 0.32 | −0.04, 0.56 | 0.75 | 0.49 | −0.05, 0.18 | 0.78 |
| RSAT 1 | 778.60, −389.43 | 870.57 | 2.36 | 0.97, −0.32 | 3.67 | 5.17 | 1.51, 1.39 | 4.90 |
| RSAT 2 | 917.24, −387.80 | 995.86 | 2.18 | 1.50, −1.90 | 4.34 | 6.86 | 2.71, 1.18 | 6.73 |
| Error Source | Simulation Results (m) (Azimuth/Range) | ||||||
|---|---|---|---|---|---|---|---|
| TSX 1 | TSX 2 | TSX 3 | RSAT 1 | RSAT 2 | |||
| Satellite position error (m) | (X) 700 | Mean | −150.659/627.794 | −132.610/509.963 | −150.672/627.804 | 141.608/1018.128 | 141.710/1020.430 |
| Std. Dev. | 0.096/1.011 | 0.091/2.534 | 0.096/1.010 | 1.350/13.682 | 1.128/13.594 | ||
| (Y) 700 | Mean | 389.985/−111.657 | 379.755/−264.306 | 387.989/−111.623 | −396.259/−209.717 | −396.269/−211.913 | |
| Std. Dev. | 0.092/2.399 | 0.093/2.998 | 0.092/2.399 | 1.241/14.866 | 1.058/14.856 | ||
| (Z) 700 | Mean | −545.411/−252.908 | −521.558/−322.164 | −545.425/−252.898 | 559.249/−406.092 | 559.068/−408.538 | |
| Std. Dev. | 0.106/1.457 | 0.100/1.564 | 0.106/1.457 | 1.180/13.884 | 0.943/13.349 | ||
| (X) 0.02 | Mean | −0.043/0.179 | −0.038/0.146 | −0.043/0.179 | 0.040/0.291 | 0.040/0.291 | |
| Std. Dev. | 0/0 | 0/0.001 | 0/0 | 0/0.004 | 0/0.004 | ||
| (Y) 0.02 | Mean | 0.111/−0.032 | 0.109/−0.076 | 0.111/−0.032 | −0.113/−0.060 | −0.113/−0.060 | |
| Std. Dev. | 0/0.001 | 0/0.001 | 0/0.001 | 0/0.004 | 0/0.004 | ||
| (Z) 0.02 | Mean | −0.156/−0.072 | −0.149/−0.092 | −0.156/−0.072 | 0.160/−0.116 | 0.160/−0.117 | |
| Std. Dev. | 0/0 | 0/0.001 | 0/0 | 0/0.004 | 0/0.004 | ||
| Satellite velocity error (m/s) | (X) 5 | Mean | −378.500/0.120 | −260.658/0.070 | −378.518/0.120 | 596.968/−0.326 | 595.457/−0.327 |
| Std. Dev. | 1.997/0 | 1.996/0 | 1.997/0 | 8.947/0.001 | 8.733/0.001 | ||
| (Y) 5 | Mean | 67.491/0.004 | 135.302/0.019 | 67.473/0.004 | −122.646/−0.014 | −123.347/−0.014 | |
| Std. Dev. | 1.201/0 | 1.172/0 | 1.201/0 | 5.295/0.002 | 5.293/0.002 | ||
| (Z) 5 | Mean | 152.463/0.019 | 164.662/0.028 | 152.461/0.020 | −238.238/−0.052 | −238.541/−0.053 | |
| Std. Dev. | 0.324/0 | 0.361/0 | 0.324/0 | 1.920/0.002 | 1.575/0.002 | ||
| (X) 0.001 | Mean | −0.076/0 | −0.052/0 | −0.076/0 | 0.119/0 | 0.119/0 | |
| Std. Dev. | 0/0 | 0/0 | 0/0 | 0/0 | 0/0 | ||
| (Y) 0.001 | Mean | 0.014/0 | 0.027/0 | 0.014/0 | −0.024/0 | −0.025/0 | |
| Std. Dev. | 0/0 | 0/0 | 0/0 | 0/0 | 0/0 | ||
| (Z) 0.001 | Mean | 0.031/0 | 0.033/0 | 0.031/0 | −0.048/0 | −0.048/0 | |
| Std. Dev. | 0/0 | 0/0 | 0/0 | 0/0 | 0/0 | ||
| Drift in spacecraft clock (100 μs) | Mean | −0.693/0 | −0.668/0 | -0.693/0 | 0.664/0 | 0.664/0 | |
| Std. Dev. | 0/0 | 0/0 | 0/0 | 0/0 | 0/0 | ||
| Signal delay (10 ns) | Mean | 0/−1.469 | 0/−1.410 | 0/−1.469 | 0/−2.389 | 0/−2.396 | |
| Std. Dev. | 0/0 | 0/0 | 0/0 | 0/0 | 0/0 | ||
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, S.; Choi, Y.; Park, I.; Sohn, H.-G. Comparison of Orbit-Based and Time-Offset-Based Geometric Correction Models for SAR Satellite Imagery Based on Error Simulation. Sensors 2017, 17, 170. https://doi.org/10.3390/s17010170
Hong S, Choi Y, Park I, Sohn H-G. Comparison of Orbit-Based and Time-Offset-Based Geometric Correction Models for SAR Satellite Imagery Based on Error Simulation. Sensors. 2017; 17(1):170. https://doi.org/10.3390/s17010170
Chicago/Turabian StyleHong, Seunghwan, Yoonjo Choi, Ilsuk Park, and Hong-Gyoo Sohn. 2017. "Comparison of Orbit-Based and Time-Offset-Based Geometric Correction Models for SAR Satellite Imagery Based on Error Simulation" Sensors 17, no. 1: 170. https://doi.org/10.3390/s17010170
APA StyleHong, S., Choi, Y., Park, I., & Sohn, H.-G. (2017). Comparison of Orbit-Based and Time-Offset-Based Geometric Correction Models for SAR Satellite Imagery Based on Error Simulation. Sensors, 17(1), 170. https://doi.org/10.3390/s17010170