
Change Analysis in Structural Laser Scanning Point Clouds: The Baseline Method


Abstract
:1. Introduction
2. Materials and Methods
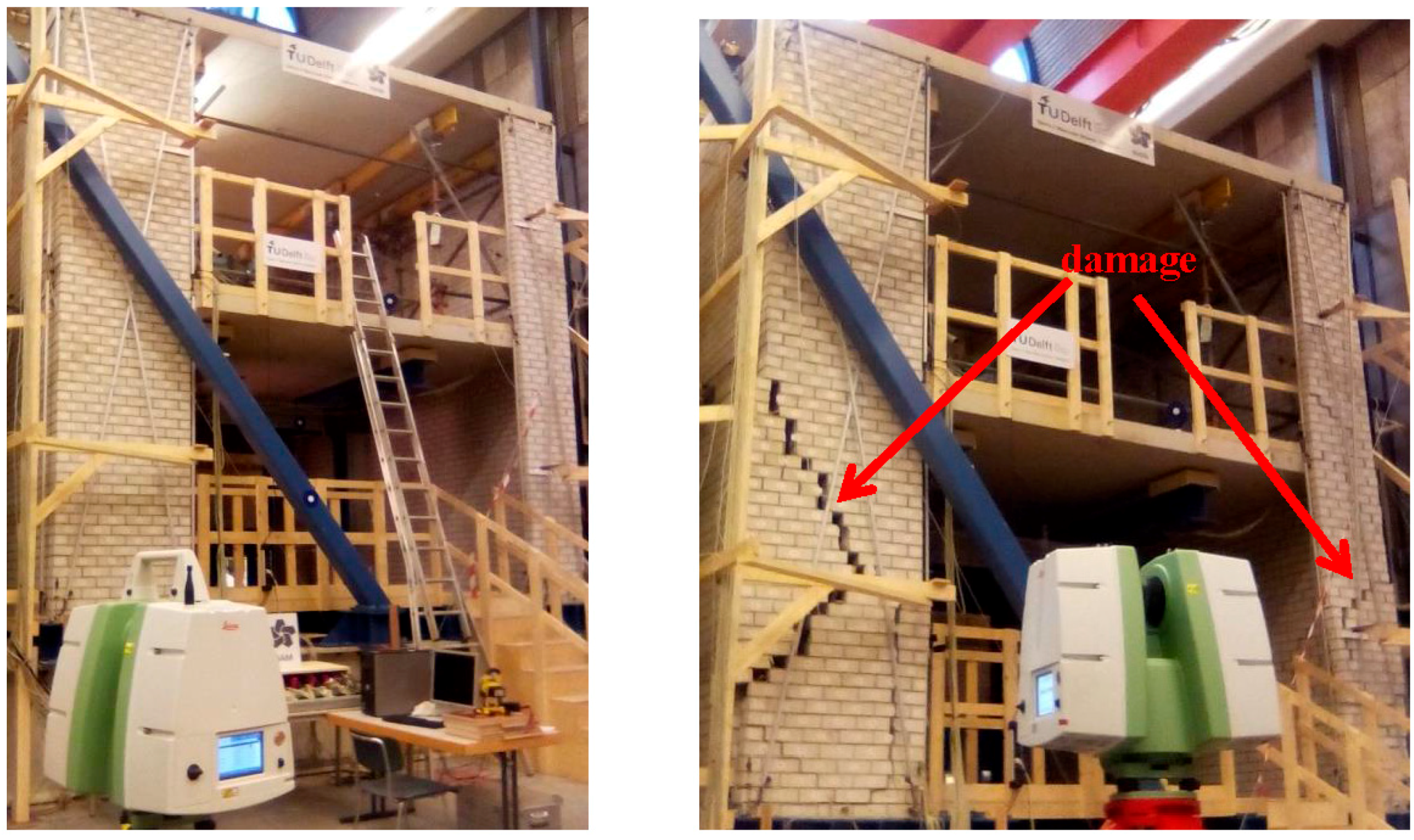
2.1. Seismic Experiment Description and Scan Data Acquisition
2.2. Change Detection Based on Baselines
2.2.1. Coordinate Transformation
- Select the point cloud of the fixed wall.
- Fit a plane to the point cloud using Principle Component Analysis (PCA).
- Project the origin of the TLS coordinate system to the plane and calculate the translational parameter.The plane equation of the fixed wall is obtained by the last step. Afterwards, the origin of the TLS coordinate system is projected to the fixed wall, being the origin of the structural coordinate system. Assuming that the plane equation of the fixed wall and the origin of TLS coordinate system are expressed as:The origin of the structural coordinate system is computed as:
- Calculate the rotational moves and transform the coordinates.The station is always level during scanning. Therefore, the structural coordinate system is established by rotating in the plane. The normal vector of the stable wall is regarded as the positive axis. The rotation angle is the angle between the normal vector and the direction . Therefore, the 3D coordinate transformation is defined by:Here, represents the rotation angle between and ; denotes the translation vector, and in this paper, .
2.2.2. Automatic Virtual Point Extraction
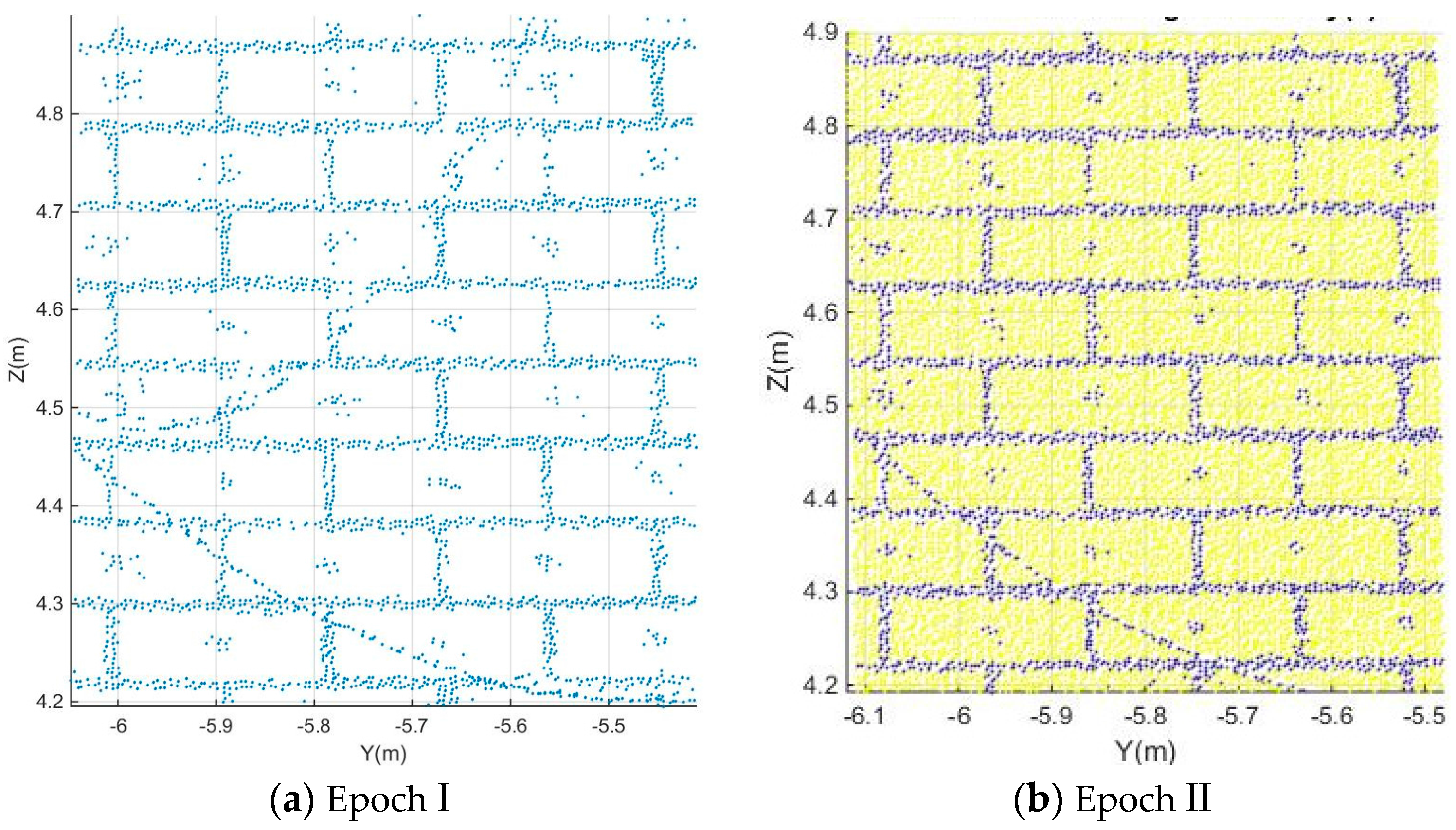
- Separation of Mortar and Bricks Using K-means ClusteringLaser scanners not only provide information about the geometric position of a surface, but also information about the portion of energy reflected by the surface, which depends on its reflectance characteristic. The backscatter generated after collision of the laser beam with the object surface is recorded by most terrestrial Lidar instruments as a function of time [41]. In our work, the mortar and the brick are composed of different materials, so the signal intensity attribute is considered a possibility to segment bricks from mortar using k-means clustering, a commonly used data clustering technique for performing unsupervised tasks. It is used to cluster objects of the input dataset into homogeneous partitions, [42,43]. In our study, the wall is composed of brick and mortar so we use this technique in a classic way with to separate brick points from mortar points based on their intensity.
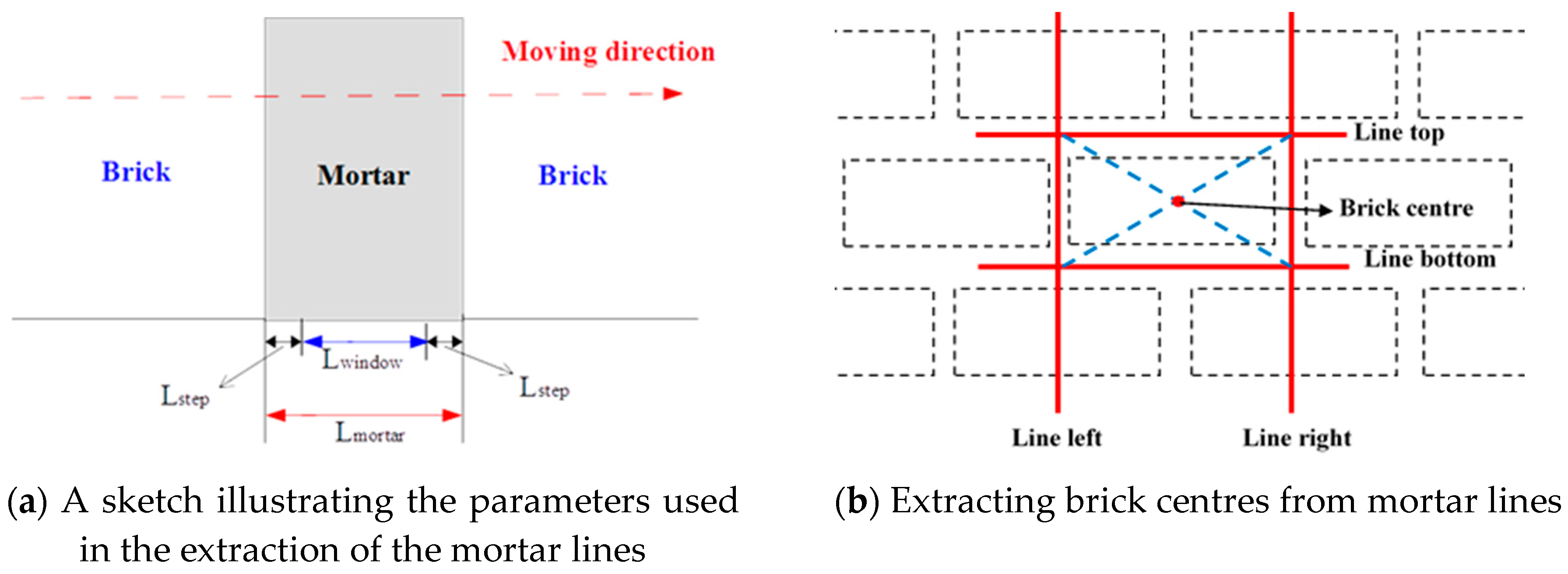
- Histogram of Y and Z Axes Using Mortar PointsThe brick point clouds are obtained by the above steps but with no accurate boundaries between different bricks. The wall is coursed masonry which means the masonry and the mortar are almost level to the wall surface. In addition, the 3D coordinates of the points have been transformed to the structural coordinate system as introduced in Section 2.2.1, which indicates that the X axis is perpendicular to the plane of the masonry wall. Therefore, a histogram along the Y and Z axis is used to estimate boundary lines between different bricks. The possible horizontal and vertical boundary lines of the bricks are determined by the peaks of the histogram along the Y and Z axis using the mortar points extracted in step 1. The procedure of determining the lines is as follows:As shown in Figure 6a, a window width and a step width is defined along the Y or the Z axis which satisfies the equation on the width of the mortar between two bricks as follows:In our work, the number of window positions along Y-direction and Z direction is given by:In which the sign means that the value is rounded up toward the nearest integer.The number of points in each window is computed and the coordinates of the points are stored.The “line density” along the Y- or Z-direction is expressed as:For each window, the line density gradient along the Y-direction or Z-direction is calculated by:When and , the window of the mortar is determined. For the analyzed directions, it always has a higher density when the mortar is perpendicular to this direction. Therefore, a density threshold is considered when the mortar window is estimated. In our work, the average number in each window width is taken as the threshold. That means that along the Y-direction and Z-direction, the thresholds are and , in which represents the number of points belonging to this patch.
- Estimating the Brick Centre PositionThe centre line position is estimated by calculating the average of the points in the mortar window as shown in Figure 6b. Four lines surrounding one brick are estimated by above procedure. Given the equations of the four lines, four intersection points are estimated. Next, the 3D coordinates of the brick centre are calculated by averaging the four intersection points. Finally, the extracted virtual points are sorted to facilitate automatic identification of virtual points from the same brick in different epochs. The regular configuration of the bricks in the masonry wall facilitates the automatic handling of the brick centre locations.
2.2.3. Baseline Establishment
2.2.4. Baseline Decomposing and Comparison
2.3. Traditional Change Detection Methods
2.3.1. Registration of Two Epochs
2.3.2. Virtual Points Extraction and Comparison
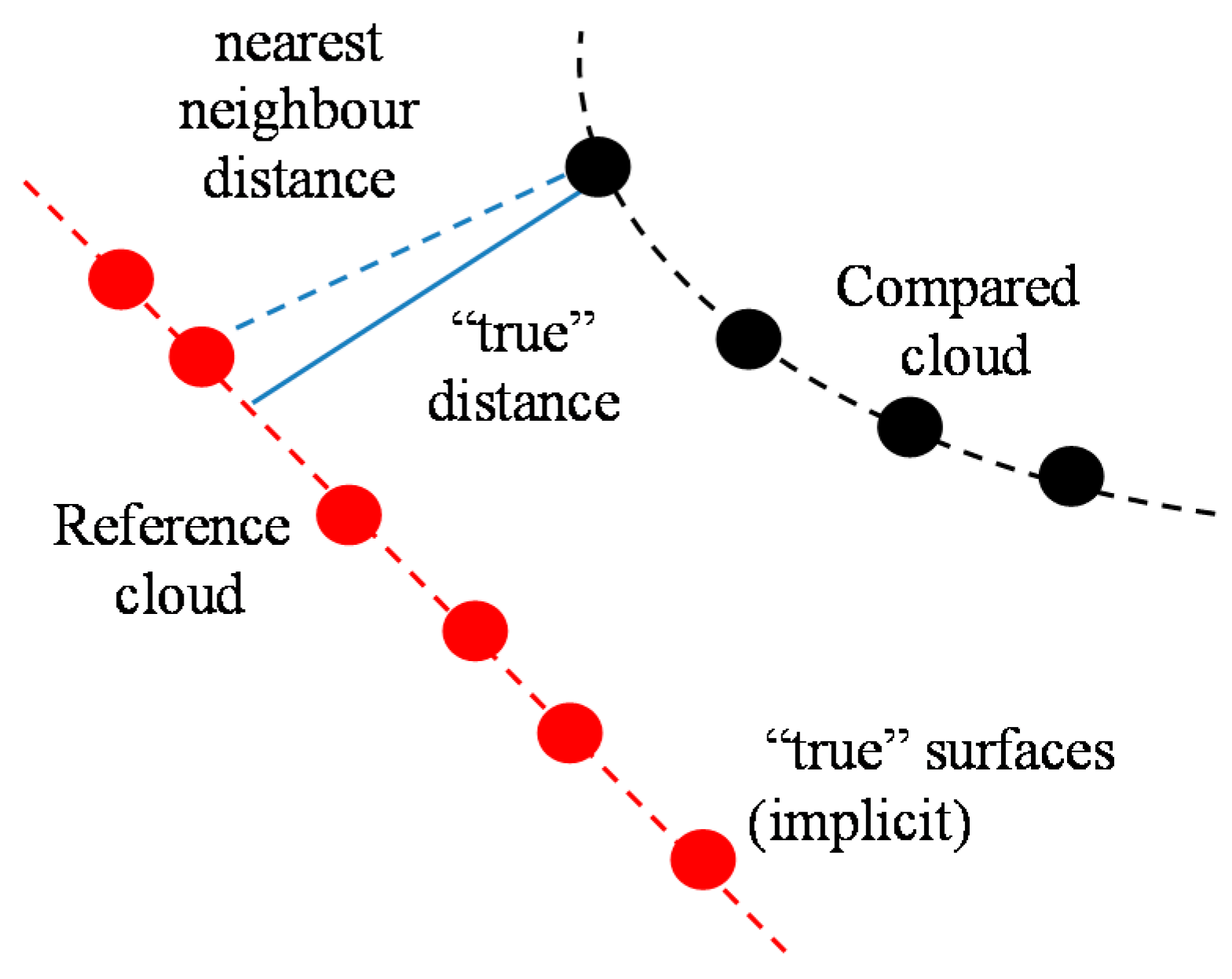
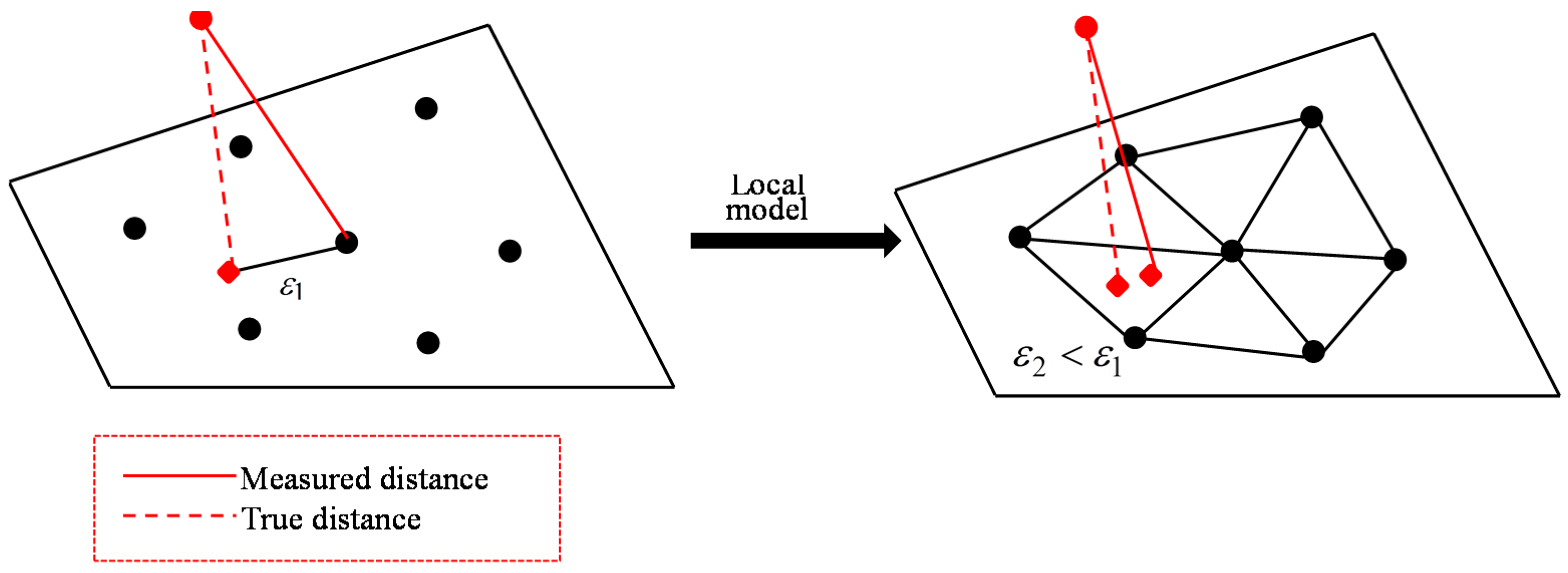
2.3.3. Cloud-To-Cloud Distances
3. Results
3.1. Structural Coordinate System Establishment and Coordinate Transformation
3.2. Virtual Point Extraction Results
3.2.1. Automatic Method
3.2.2. Comparison to Manual Virtual Point Extraction
3.3. Baseline Establishment and Decomposing
3.4. Baseline Changes
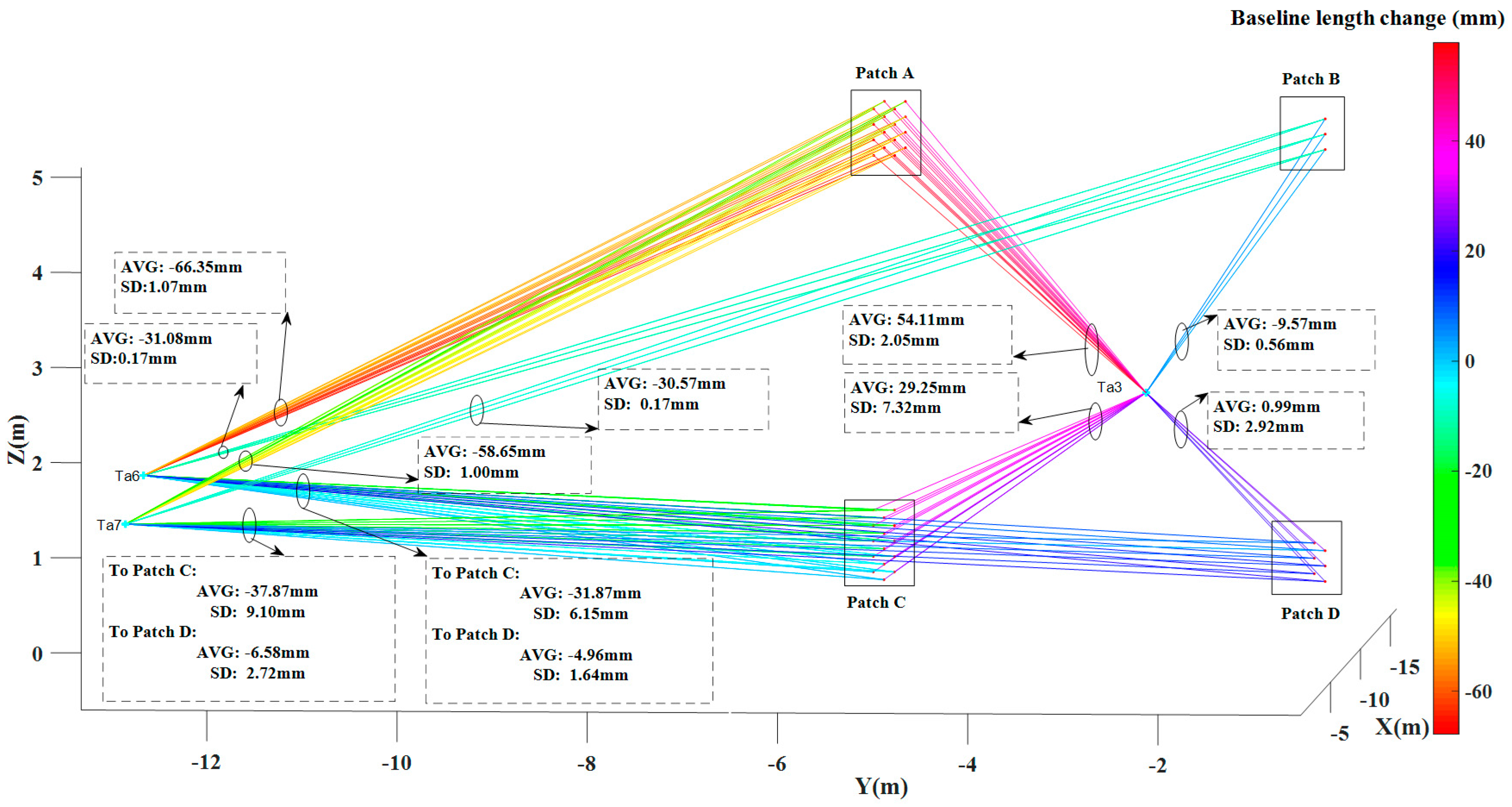
3.4.1. Baseline Changes between Patches and Targets
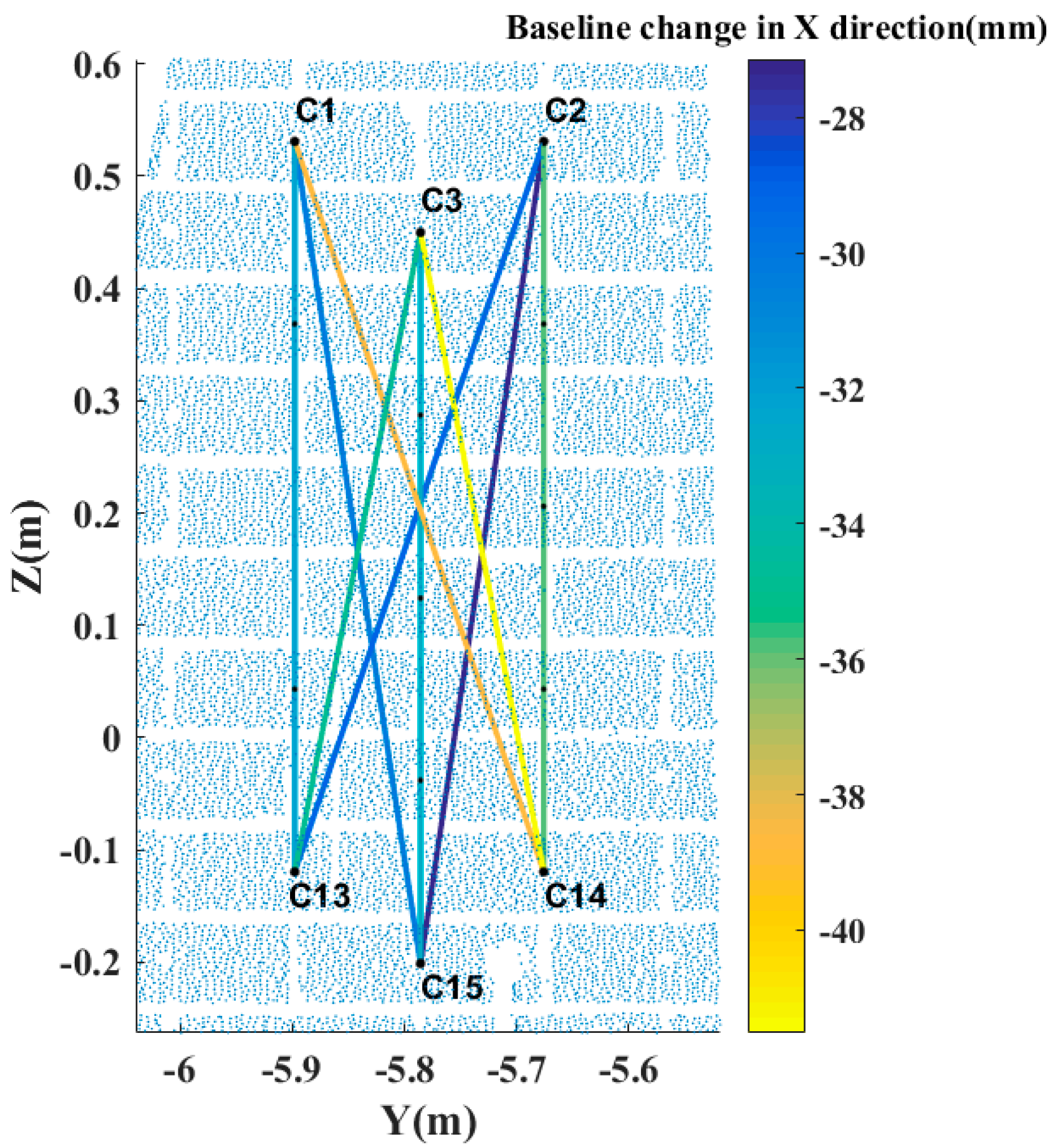
3.4.2. Baseline Changes within a Patch
3.4.3. Baseline Changes between Patches
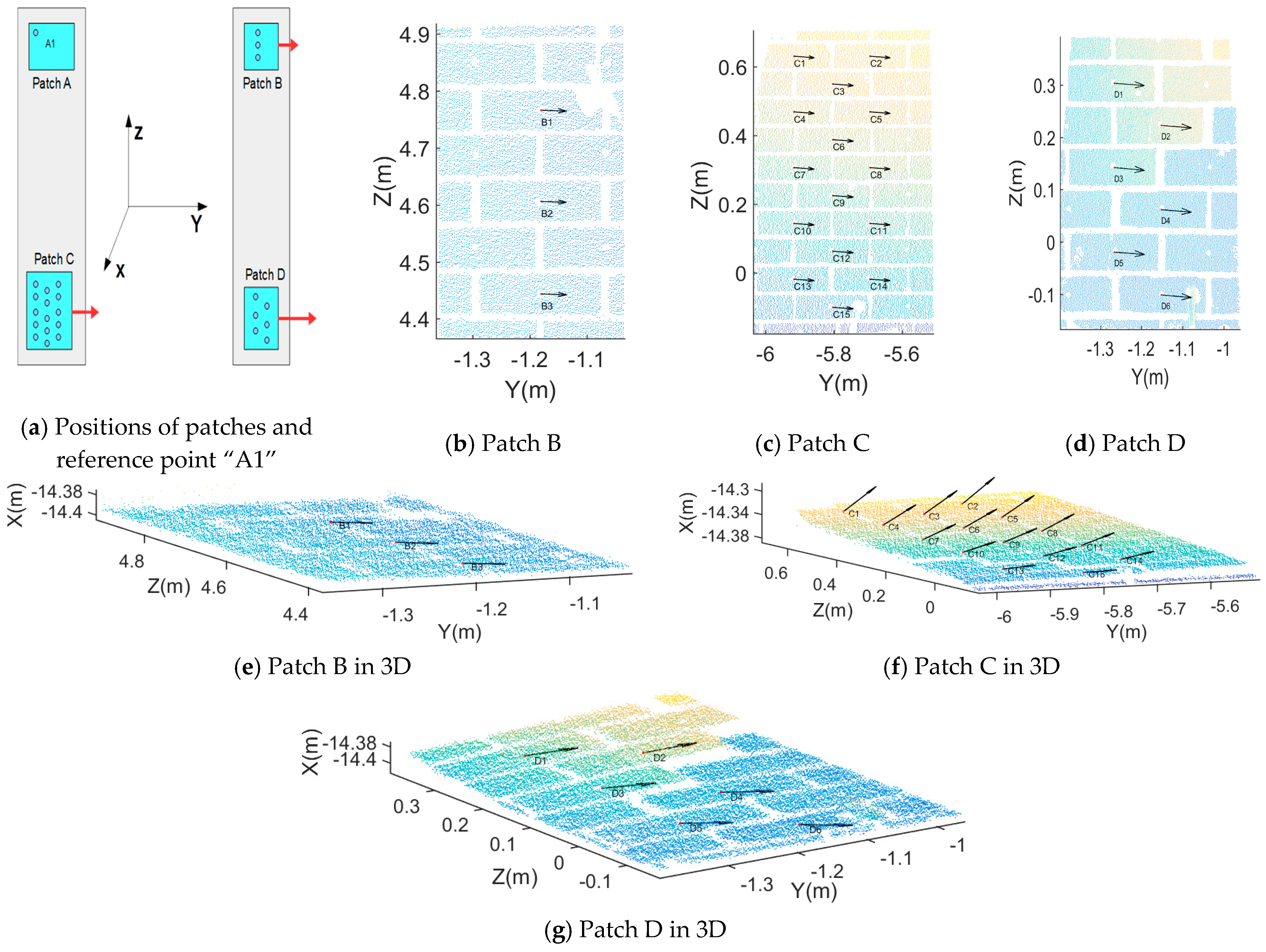
3.4.4. Displacement Vectors
3.5. Comparison to Traditional Change Detection Methods
3.5.1. Registration of Two Epochs
3.5.2. Virtual Point Comparison
3.5.3. Cloud-to-Cloud Distances
3.5.4. Comparative Analysis
4. Conclusions and Recommendations
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Vosselman, G.; Maas, H.-G. Airborne and Terrestrial Laser Scanning; Whittles Publishing: Dunbeath, UK, 2010. [Google Scholar]
- Lindenbergh, R.; Uchanski, L.; Bucksch, A.; Van Gosliga, R. Structural monitoring of tunnels using terrestrial laser scanning. Rep. Geod. 2009, 2, 231–238. [Google Scholar]
- Cai, H.; Rasdorf, W. Modeling Road Centerlines and Predicting Lengths in 3-D Using LIDAR Point Cloud and Planimetric Road Centerline Data. Comput.-Aided Civ. Infrastruct. Eng. 2008, 23, 157–173. [Google Scholar] [CrossRef]
- Wang, K.C.P.; Hou, Z.; Gong, W. Automated Road Sign Inventory System Based on Stereo Vision and Tracking. Comput.-Aided Civ. Infrastruct. Eng. 2010, 25, 468–477. [Google Scholar] [CrossRef]
- Pesci, A.; Teza, G.; Bonali, E. Terrestrial Laser Scanner Resolution: Numerical Simulations and Experiments on Spatial Sampling Optimization. Remote Sens. 2011, 3, 167–184. [Google Scholar] [CrossRef]
- Zhang, C.; Elaksher, A. An Unmanned Aerial Vehicle-Based Imaging System for 3D Measurement of Unpaved Road Surface Distresses. Comput.-Aided Civ. Infrastruct. Eng. 2012, 27, 118–129. [Google Scholar] [CrossRef]
- Gil, E.; Llorens, J.; Llop, J.; Fabregas, X.; Gallart, M. Use of a terrestrial LIDAR sensor for drift detection in vineyard spraying. Sensors 2013, 13, 516–534. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pirotti, F. State of the Art of Ground and Aerial Laser Scanning Technologies for High-Resolution Topography of the Earth Surface. Eur. J. Remote Sens. 2013, 46, 66–78. [Google Scholar] [CrossRef]
- Capra, A.; Bertacchini, E.; Castagnetti, C.; Rivola, R.; Dubbini, M. Recent approaches in geodesy and geomatics for structures monitoring. Rendiconti Lincei 2015, 26, 53–61. [Google Scholar] [CrossRef] [Green Version]
- Park, H.S.; Lee, H.M.; Adeli, H. A New Approach for Health Monitoring of Structures Terrestrial Laser. Comput.-Aided Civ. Infrastruct. Eng. 2007, 22, 19–30. [Google Scholar] [CrossRef]
- Vezocnik, R.; Ambrozic, T.; Sterle, O.; Bilban, G.; Pfeifer, N.; Stopar, B. Use of terrestrial laser scanning technology for long term high precision deformation monitoring. Sensors 2009, 9, 9873–9895. [Google Scholar] [CrossRef] [PubMed]
- Zhang, F.; Knoll, A. Vehicle Detection Based on Probability Hypothesis Density Filter. Sensors 2016, 16, 510. [Google Scholar] [CrossRef] [PubMed]
- Truong-Hong, L.; Laefer, D.F.; Hinks, T.; Carr, H. Combining an Angle Criterion with Voxelization and the Flying Voxel Method in Reconstructing Building Models from LiDAR Data. Comput. Aided Civ. Infrastruct. Eng. 2013, 28, 112–129. [Google Scholar] [CrossRef]
- Sithole, G. Detection of bricks in a masonry wall. ISPRS Arch. 2008, XXXVII, 567–572. [Google Scholar]
- Lourenço, P.B. Computations on historic masonry structures. Progress Struct. Eng. Mater. 2002, 4, 301–319. [Google Scholar] [CrossRef]
- Riveiro, B.; Lourenço, P.B.; Oliveira, D.V.; González-Jorge, H.; Arias, P. Automatic Morphologic Analysis of Quasi-Periodic Masonry Walls from LiDAR. Comput.-Aided Civ. Infrastruct. Eng. 2016, 31, 305–319. [Google Scholar] [CrossRef]
- Lourenço, P.B.; Mendes, N.; Ramos, L.F.; Oliveira, D.V. Analysis of masonry structures without box behavior. Int. J. Archit. Herit. 2011, 5, 369–382. [Google Scholar] [CrossRef] [Green Version]
- Lindenbergh, R.; Pietrzyk, P. Change detection and deformation analysis using static and mobile laser scanning. Appl. Geomat. 2015, 7, 65–74. [Google Scholar] [CrossRef]
- Van Gosliga, R.; Lindenbergh, R.; Pfeifer, N. Deformation analysis of a bored tunnel by means of terrestrial laser scanning. ISPRS Arch. 2006, XXXVI, 167–172. [Google Scholar]
- Lindenbergh, R.; Pfeifer, N. A statistical deformation analysis of two epochs of terrestrial laser data of a lock. In Proceedings of the 7th Conference on Optical 3D Measurement, Vienna, Austria, 29–30 October 2005; pp. 61–70.
- Hofton, M.; Blair, J.B. Laser pulse correlation: A method for detecting subtle topographic change using LiDAR return waveforms. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2001, 34, 181–184. [Google Scholar]
- Schäfer, T.; Weber, T.; Kyrinovič, P.; Zámečniková, M. Deformation Measurement Using Terrestrial Laser Scanning at the Hydropower Station of Gabčíkovo. In Proceedings of the INGEO 2004 and FIG Regional Central and Eastern European Conference on Engineering Surveying, Bratislava, Slovakia, 10–13 November 2004.
- Men, H.; Gebre, B.; Pochiraju, K. Color point cloud registration with 4D ICP algorithm. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 1511–1516.
- Jost, T.; Hügli, H. Fast ICP Algorithms for Shape Registration, Joint Pattern Recognition Symposium; Springer: Berlin, Heidelberg, 2002; pp. 91–99. [Google Scholar]
- Rusu, R.B.; Blodow, N.; Marton, Z.C.; Beetz, M. Aligning point cloud views using persistent feature histograms. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 3384–3391.
- Jiang, J.; Cheng, J.; Chen, X. Registration for 3-D point cloud using angular-invariant feature. Neurocomputing 2009, 72, 3839–3844. [Google Scholar] [CrossRef]
- Rabbani, T.; van den Heuvel, F. Automatic point cloud registration using constrained search for corresponding objects. In Proceedings of the 7th Conference on Optical 3D Measurement Technique, Vienna, Austria, 29–30 October 2005; pp. 177–186.
- Gressin, A.; Mallet, C.; Demantké, J.; David, N. Towards 3D lidar point cloud registration improvement using optimal neighborhood knowledge. ISPRS J. Photogramm. Remote Sens. 2013, 79, 240–251. [Google Scholar] [CrossRef]
- Cignoni, P.; Rocchini, C.; Scopigno, R. Metro: Measuring Error on Simplified Surfaces. Comput. Graph. Forum 1998, 17, 167–174. [Google Scholar] [CrossRef]
- Aspert, N.; Santa Cruz, D.; Ebrahimi, T. MESH: Measuring Errors between Surfaces Using the Hausdorff Distance. In Proceedings of the IEEE International Conference in Multimedia and Expo, Lausanne, Switzerland, 26–29 August 2002; pp. 705–708.
- Girardeau-Montaut, D.; Roux, M.; Marc, R.; Thibault, G. Change detection on points cloud data acquired with a ground laser scanner. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2005, 36, W19. [Google Scholar]
- Rusu, R.B.; Meeussen, W.; Chitta, S.; Beetz, M. Laser-based perception for door and handle identification. In Proceedings of the 2009 International Conference on Advanced Robotics, Munich, Germany, 22–26 June 2009; pp. 1–8.
- Trevor, A.J.; Gedikli, S.; Rusu, R.B.; Christensen, H.I. Efficient organized point cloud segmentation with connected components. In Proceedings of the 3rd Workshop on Semantic Perception Mapping and Exploration (SPME), Karlsruhe, Germany, 22–29 March 2013.
- Rusu, R.B.; Holzbach, A.; Blodow, N.; Beetz, M. Fast geometric point labeling using conditional random fields. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 7–12.
- Geosystems, L. Leica ScanStation C10; Product Specifications: Heerbrugg, Switzerland, 2012. [Google Scholar]
- Soudarissanane, S.; Lindenbergh, R. Optimizing terrestrial laser scanning measurement set-up. In Proceedings of the 2011 International Society for Photogrammetry and Remote Sensing (ISPRS) Workshop Laser Scanning, Calgary, AB, Canada, 29–31 August 2011.
- Abbas, M.A.; Setan, H.; Majid, Z.; Chong, A.K.; Idris, K.M.; Aspuri, A. Calibration and accuracy assessment of leica scanstation c10 terrestrial laser scanner. In Developments in Multidimensional Spatial Data Models; Springer: Berlin, Germany, 2013; pp. 33–47. [Google Scholar]
- Sanchez, V.; Zakhor, A. Planar 3D modeling of building interiors from point cloud data. In Proceedings of the 2012 19th IEEE International Conference on Image, Orlando, FL, USA, 30 September–3 October 2012; pp. 1777–1780.
- Jolliffe, I. Principal Component Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Van Goor, B.; Lindenbergh, R.; Soudarissanane, S. Identifying corresponding segments from repeated scan data. In Proceedings of the 2011 International Society for Photogrammetry and Remote Sensing (ISPRS) Workshop Laser Scanning, Calgary, AB, Canada, 29–31 August 2011.
- Höfle, B.; Pfeifer, N. Correction of laser scanning intensity data: Data and model-driven approaches. ISPRS J. Photogramm. Remote Sens. 2007, 62, 415–433. [Google Scholar] [CrossRef]
- Forgey, E. Cluster analysis of multivariate data: Efficiency vs. interpretability of classification. Biometrics 1965, 21, 768–769. [Google Scholar]
- MacQueen, J. Proceedings of the Fifth Berkeley Symposium on Mathematical Statistics and Probability: Statistics; University of California Press: Berkeley, CA, USA, 1967. [Google Scholar]
- Mémoli, F.; Sapiro, G. Comparing point clouds. In Proceedings of the 2004 Eurographics/ACM SIGGRAPH Symposium on Geometry Processing, Nice, France, 8–10 July 2004; pp. 32–40.
- Girardeau-Montaut, D. CloudCompare. 2014. Available online: http://www.danielgm.net/cc (accessed on 19 December 2016).
- Steder, B.; Grisetti, G.; Burgard, W. Robust place recognition for 3D range data based on point features. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA), Raleigh, NC, USA, 3–8 May 2010; pp. 1400–1405.
- Hänsch, R.; Weber, T.; Hellwich, O. Comparison of 3D interest point detectors and descriptors for point cloud fusion. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 57. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target | Patch | Maximum Change (mm) | Minimum Change (mm) | Mean Change (mm) | Standard Deviation (mm) |
|---|---|---|---|---|---|
| Ta3 | A | 57.86 | 50.70 | 54.11 | 2.05 |
| B | −10.09 | −8.98 | −9.57 | 0.56 | |
| C | 41.36 | 17.04 | 29.25 | 7.32 | |
| D | −4.81 | −1.10 | 0.99 | 2.92 | |
| Ta6 | A | −67.79 | −64.14 | −66.35 | 1.07 |
| B | −31.28 | −30.95 | −31.08 | 0.17 | |
| C | −41.32 | −21.02 | −31.86 | 6.14 | |
| D | −7.42 | −3.32 | −4.96 | 1.64 | |
| Ta7 | A | −59.88 | −56.48 | −58.65 | 1.00 |
| B | −30.77 | −30.46 | −30.57 | 0.17 | |
| C | −51.81 | −22.18 | −37.87 | 9.10 | |
| D | −10.54 | −3.79 | −6.58 | 2.72 |
| Patch | Patch | Maximum Change (mm) | Minimum Change (mm) | Mean Change (mm) | Standard Deviation (mm) |
|---|---|---|---|---|---|
| A | B | 44.63 | 44.07 | 44.37 | 0.17 |
| C | 6.93 | 0.06 | 2.14 | 2.20 | |
| D | 56.50 | 50.87 | 53.94 | 1.21 | |
| B | C | −9.60 | −7.66 | −8.56 | 0.52 |
| D | 3.61 | 2.05 | 2.93 | 0.58 | |
| C | D | 15.49 | 13.33 | 14.56 | 0.64 |
| Patch | Patch | Axis | Maximum Change (mm) | Minimum Change (mm) | Mean Change (mm) | Standard Deviation (mm) |
|---|---|---|---|---|---|---|
| A | B | X | 4.40 | 0.56 | 2.82 | 1.00 |
| Y | −44.60 | −44.21 | −44.38 | 0.16 | ||
| Z | 1.61 | 0.01 | −0.39 | 0.81 | ||
| C | X | −46.36 | −1.33 | −24.45 | 12.60 | |
| Y | −60.00 | −58.23 | −58.97 | 0.61 | ||
| Z | 4.77 | 1.38 | 2.45 | 0.83 | ||
| D | X | 12.11 | 0.07 | 5.06 | 4.98 | |
| Y | −73.71 | −73.00 | −73.33 | 0.23 | ||
| Z | 5.24 | 1.67 | 2.82 | 0.87 |
| Target Name | Weight | Error (m) | Error Vector (m) |
|---|---|---|---|
| Ta3 | 1 | 0.001 | (0.001,0.000,0.000) |
| Ta6 | 1 | 0.000 | (−0.001,0.000,0.000) |
| Ta7 | 1 | 0.001 | (0.000,0.000,0.000) |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, Y.; Lindenbergh, R.; Wang, J. Change Analysis in Structural Laser Scanning Point Clouds: The Baseline Method. Sensors 2017, 17, 26. https://doi.org/10.3390/s17010026
Shen Y, Lindenbergh R, Wang J. Change Analysis in Structural Laser Scanning Point Clouds: The Baseline Method. Sensors. 2017; 17(1):26. https://doi.org/10.3390/s17010026
Chicago/Turabian StyleShen, Yueqian, Roderik Lindenbergh, and Jinhu Wang. 2017. "Change Analysis in Structural Laser Scanning Point Clouds: The Baseline Method" Sensors 17, no. 1: 26. https://doi.org/10.3390/s17010026
APA StyleShen, Y., Lindenbergh, R., & Wang, J. (2017). Change Analysis in Structural Laser Scanning Point Clouds: The Baseline Method. Sensors, 17(1), 26. https://doi.org/10.3390/s17010026