
A Canopy Density Model for Planar Orchard Target Detection Based on Ultrasonic Sensors



Abstract
:1. Introduction
2. Materials and Methods
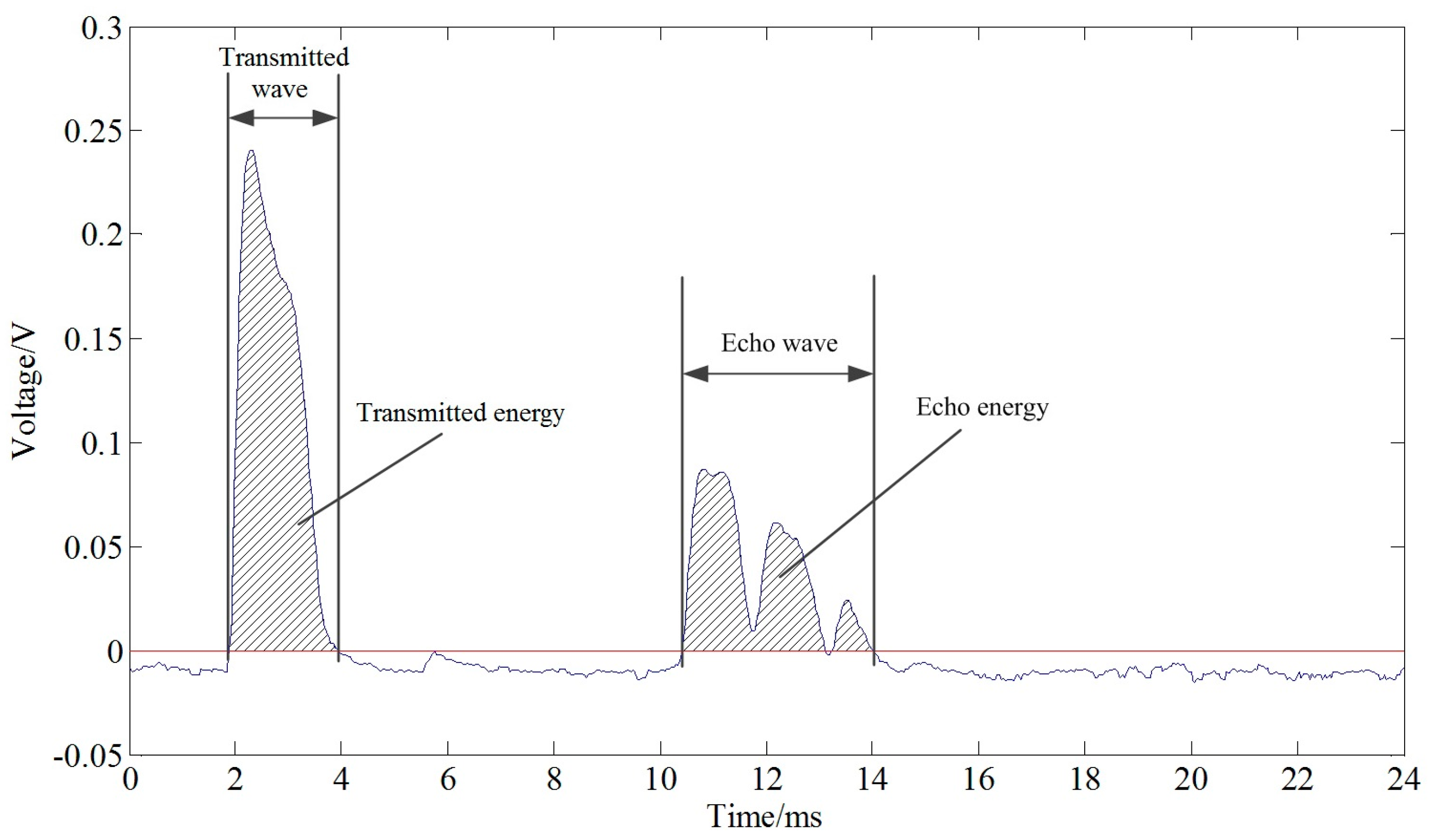
2.1. Target Canopy Density Detection Method
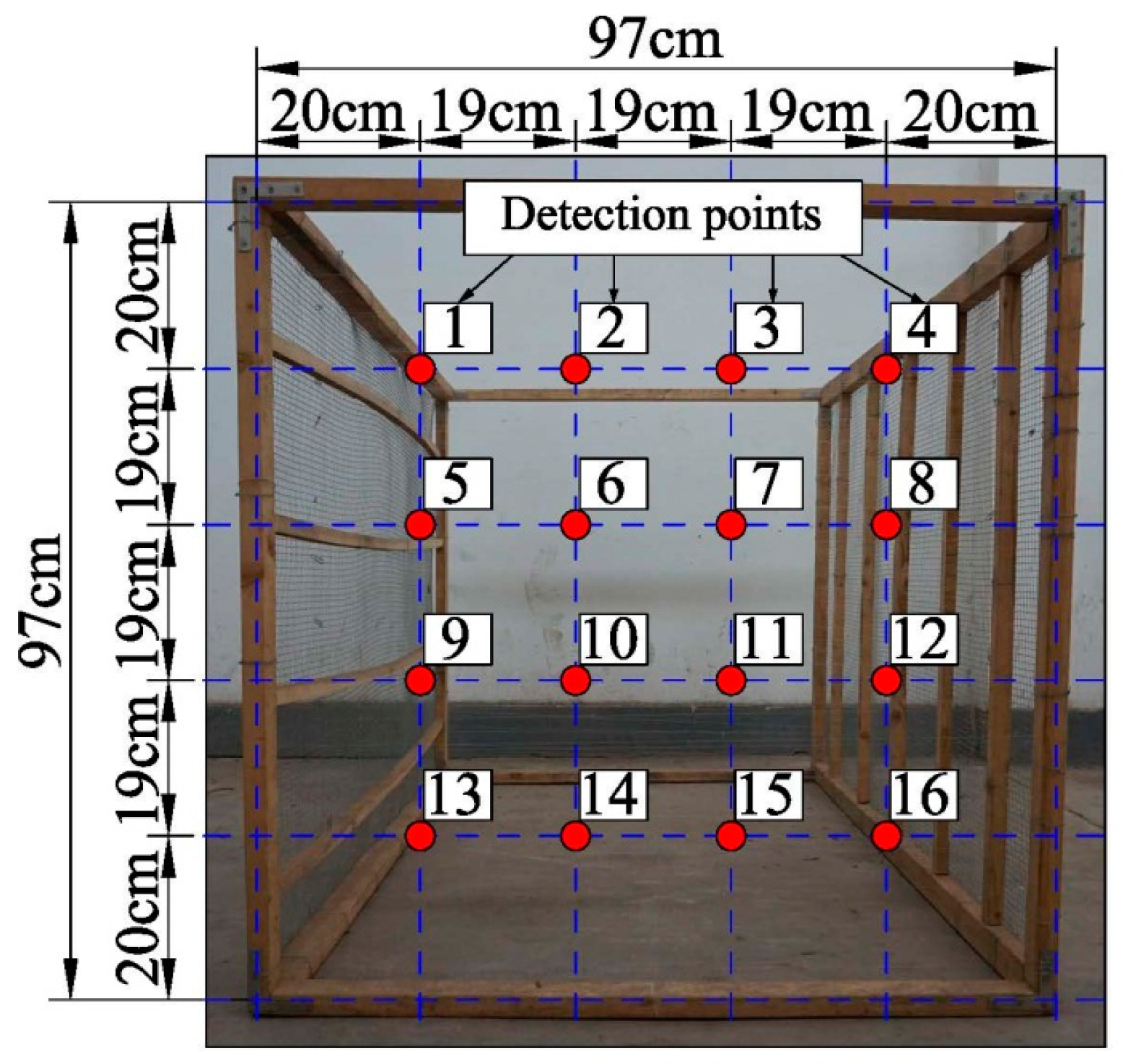
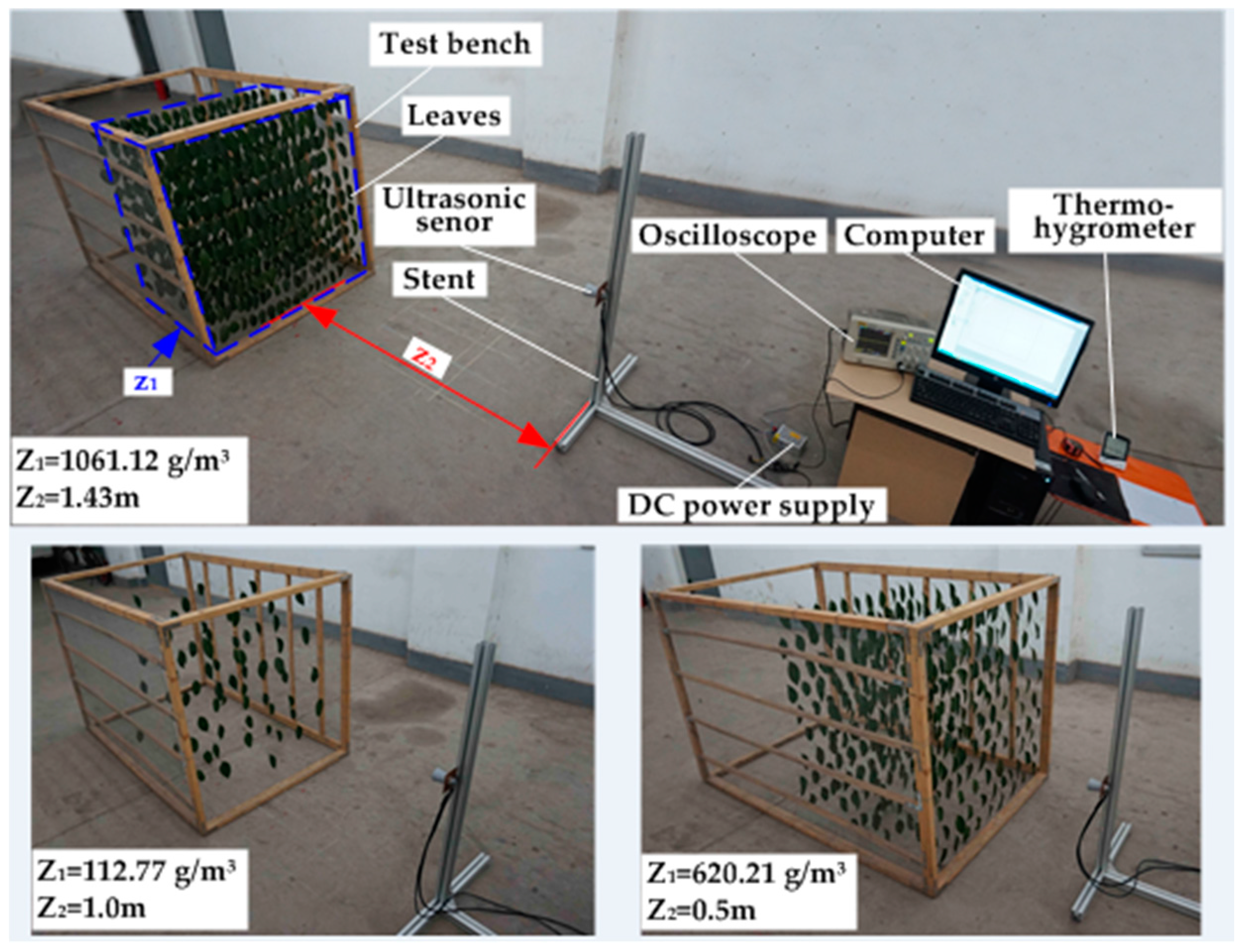
2.2. Target Density Detection System
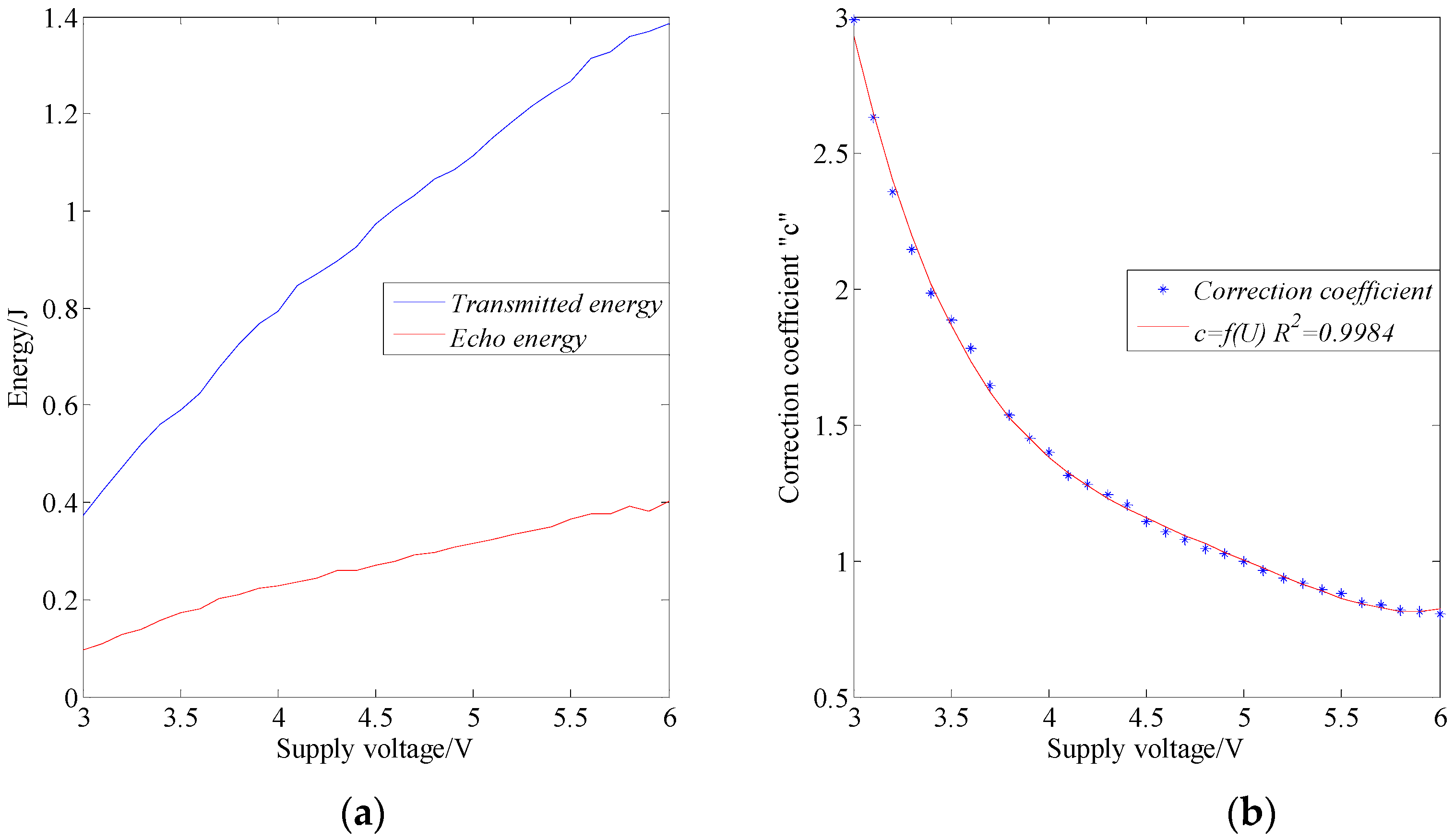
2.3. Experiment for the Relationship between the Ultrasonic Energy and the Power Supply Voltage
2.4. Experiment for Beam Width of Ultrasonic Sensor
2.5. Orthogonal Regression Central Composite Experimental Design
2.6. Verification Test Design
3. Results and Discussion
3.1. Relationship between the Ultrasonic Energy and the Power Supply Voltage
3.2. Beam Width of the Ultrasonic Sensor
3.3. Canopy Density Model
3.4. Model Equation Selection
3.5. Model Equation Verification
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Rosell, J.R.; Sanz, R. A review of methods and applications of the geometric characterization of tree crops in agricultural activities. Comput. Electron. Agric. 2012, 81, 124–141. [Google Scholar] [CrossRef]
- Gil, E.; Arno, J.; Llorens, J.; Sanz, R.; Llop, J.; Rosell-Polo, J.R.; Gallart, M.; Escola, A. Advanced technologies for the improvement of spray application techniques in Spanish viticulture: An overview. Sensors 2014, 14, 691–708. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Miranda-Fuentes, A.; Rodriguez-Lizana, A.; Gil, E.; Aguera-Vega, J.; Gil-Ribes, J.A. Influence of liquid-volume and airflow rates on spray application quality and homogeneity in super-intensive olive tree canopies. Sci. Total Environ. 2015, 537, 250–259. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Sun, H.; Li, M.; Zhang, Q. Technology Application of Smart Spray in Agriculture: A Review. Intell. Autom. Soft Comput. 2015, 21, 319–333. [Google Scholar] [CrossRef]
- Meron, M.; Cohen, S.; Melman, G. Tree shape and volume measurement by light interception and aerial photogrammetry. Trans. ASAE 2000, 43, 475–481. [Google Scholar] [CrossRef]
- Sinoquet, H.; Sonohat, G.; Phattaralerphong, J.; Godin, C. Foliage randomness and light interception in 3-D digitized trees: An analysis from multiscale discretization of the canopy. Plant Cell Environ. 2005, 28, 1158–1170. [Google Scholar] [CrossRef]
- Schumann, A.W.; Zaman, Q.U. Software development for real-time ultrasonic mapping of tree canopy size. Comput. Electron. Agric. 2005, 47, 25–40. [Google Scholar] [CrossRef]
- Zaman, Q.U.; Schumann, A.W.; Miller, W.M. Variable rate nitrogen application in Florida citrus based on ultrasonically-sensed tree size. Appl. Eng. Agric. 2005, 21, 331–335. [Google Scholar] [CrossRef]
- Escola, A.; Planas, S.; Rosell, J.R.; Pomar, J.; Camp, F.; Solanelles, F.; Gracia, F.; Llorens, J.; Gil, E. Performance of an ultrasonic ranging sensor in apple tree canopies. Sensors 2011, 11, 2459–2477. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Llorens, J.; Gil, E.; Llop, J.; Escola, A. Ultrasonic and LIDAR sensors for electronic canopy characterization in vineyards: Advances to improve pesticide application methods. Sensors 2011, 11, 2177–2194. [Google Scholar] [CrossRef] [PubMed]
- Maghsoudi, H.; Minaei, S.; Ghobadian, B.; Masoudi, H. Ultrasonic sensing of pistachio canopy for low-volume precision spraying. Comput. Electron. Agric. 2015, 112, 149–160. [Google Scholar] [CrossRef]
- Jejcic, V.; Godesa, T.; Hocevar, M.; Sirok, B.; Malnersic, A.; Lesnik, M.; Strancar, A.; Stajnko, D. Design and Testing of an Ultrasound System for Targeted Spraying in Orchards. Stroj. Vestnik J. Mech. Eng. 2011, 57, 587–598. [Google Scholar] [CrossRef]
- Stajnko, D.; Berk, P.; Lesnik, M.; Jejcic, V.; Lakota, M.; Strancar, A.; Hocevar, M.; Rakun, J. Programmable ultrasonic sensing system for targeted spraying in orchards. Sensors 2012, 12, 15500–15519. [Google Scholar] [CrossRef] [PubMed]
- Gamarra-Diezma, J.L.; Miranda-Fuentes, A.; Llorens, J.; Cuenca, A.; Blanco-Roldan, G.L.; Rodriguez-Lizana, A. Testing accuracy of long-range ultrasonic sensors for olive tree canopy measurements. Sensors 2015, 15, 2902–2919. [Google Scholar] [CrossRef] [PubMed]
- Rosell, J.R.; Llorens, J.; Sanz, R.; Arnó, J.; Ribes-Dasi, M.; Masip, J.; Escolà, A.; Camp, F.; Solanelles, F.; Gràcia, F.; et al. Obtaining the three-dimensional structure of tree orchards from remote 2D terrestrial LIDAR scanning. Agric. For. Meteorol. 2009, 149, 1505–1515. [Google Scholar] [CrossRef]
- Osterman, A.; Godeša, T.; Hočevar, M.; Širok, B.; Stopar, M. Real-time positioning algorithm for variable-geometry air-assisted orchard sprayer. Comput. Electron. Agric. 2013, 98, 175–182. [Google Scholar] [CrossRef]
- Sanz, R.; Rosell, J.R.; Llorens, J.; Gil, E.; Planas, S. Relationship between tree row LIDAR-volume and leaf area density for fruit orchards and vineyards obtained with a LIDAR 3D Dynamic Measurement System. Agric. Forest Meteorol. 2013, 171–172, 153–162. [Google Scholar] [CrossRef]
- Méndez, V.; Rosell-Polo, J.R.; Sanz, R.; Escolà, A.; Catalán, H. Deciduous tree reconstruction algorithm based on cylinder fitting from mobile terrestrial laser scanned point clouds. Biosyst. Eng. 2014, 124, 78–88. [Google Scholar] [CrossRef]
- Miranda-Fuentes, A.; Llorens, J.; Gamarra-Diezma, J.L.; Gil-Ribes, J.A.; Gil, E. Towards an optimized method of olive tree crown volume measurement. Sensors 2015, 15, 3671–3687. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zarate Valdez, J.L.; Whiting, M.L.; Lampinen, B.D.; Metcalf, S.; Ustin, S.L.; Brown, P.H. Prediction of leaf area index in almonds by vegetation indexes. Comput. Electron. Agric. 2012, 85, 24–32. [Google Scholar] [CrossRef]
- Liu, C.; Kang, S.; Li, F.; Li, S.; Du, T. Canopy leaf area index for apple tree using hemispherical photography in arid region. Sci. Hortic. 2013, 164, 610–615. [Google Scholar] [CrossRef]
- Zarate Valdez, J.L.; Metcalf, S.; Stewart, W.; Ustin, S.L.; Lampinen, B. Estimating light interception in tree crops with digital images of canopy shadow. Precis. Agric. 2015, 16, 425–440. [Google Scholar] [CrossRef]
- Gil, E.; Llorens, J.; Llop, J.; Fabregas, X.; Gallart, M. Use of a terrestrial LIDAR sensor for drift detection in vineyard spraying. Sensors 2013, 13, 516–534. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Andujar, D.; Rueda-Ayala, V.; Moreno, H.; Rosell-Polo, J.R.; Escola, A.; Valero, C.; Gerhards, R.; Fernandez-Quintanilla, C.; Dorado, J.; Griepentrog, H.W. Discriminating crop, weeds and soil surface with a terrestrial LIDAR sensor. Sensors 2013, 13, 14662–14675. [Google Scholar] [CrossRef] [PubMed]
- Walklate, P.J.; Cross, J.V.; Richardson, G.M.; Murray, R.A.; Baker, D.E. Comparison of Different Spray Volume Deposition Models Using LIDAR Measurements of Apple Orchards. Biosyst. Eng. 2002, 82, 253–267. [Google Scholar] [CrossRef]
- Palleja, T.; Landers, A.J. Real time canopy density estimation using ultrasonic envelope signals in the orchard and vineyard. Comput. Electron. Agric. 2015, 115, 108–117. [Google Scholar] [CrossRef]
- Yang, Z.P.; Yan, X.L. Experimental Optimization Technique, 1st ed.; Northweat A&F University Press: Yangling, China, 2003; pp. 74–100, 142–166. (In Chinese) [Google Scholar]
- Zhai, C.Y.; Wang, X.; Liu, D.Y.; Ma, W.; Mao, Y.J. Nozzle flow model of high pressure variable-rate spraying based on PWM technology. Adv. Mater. Res. 2011, 422, 208–217. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor | Zlj | Zuj | Z0j | ∆j | −γ | −1 | 0 | 1 | γ |
|---|---|---|---|---|---|---|---|---|---|
| Density (Z1) [g/m3] | 112.77 | 1127.66 | 620.21 | 440.91 | 112.77 | 179.31 | 620.21 | 1061.12 | 1127.66 |
| Distance (Z2) [m] | 0.5 | 1.5 | 1.0 | 0.43 | 0.5 | 0.57 | 1.0 | 1.43 | 1.5 |
| Tests | S [m] | WL [cm] | WR [cm] | Average of WL [cm] | Average of WR [cm] |
|---|---|---|---|---|---|
| 1 | 0.5 | 6 | 7 | 6.3 | 6.8 |
| 2 | 6.5 | 6.5 | |||
| 3 | 6.5 | 7 | |||
| 4 | 0.57 | 8 | 7 | 7.7 | 7.0 |
| 5 | 7.5 | 7 | |||
| 6 | 7.5 | 7 | |||
| 7 | 1.0 | 11 | 12 | 10.5 | 11.2 |
| 8 | 10.5 | 11 | |||
| 9 | 10 | 10.5 | |||
| 10 | 1.43 | 12 | 13 | 12.0 | 12.3 |
| 11 | 11 | 12 | |||
| 12 | 13 | 12 | |||
| 13 | 1.5 | 16 | 14 | 15.0 | 14.2 |
| 14 | 15 | 14.5 | |||
| 15 | 14 | 14 |
| Z1 [g/m3] (x1) | Z1 [m] (x2) | x1x2 | x1’ | x2’ | Transmitted Energy [J] | Echo Energy [J] | Normalized Echo Energy [J] | Decuple Normalized Echo Energy [J] |
|---|---|---|---|---|---|---|---|---|
| 1061.12(1) | 1.43(1) | 1 | 0.396 | 0.396 | 1.2738 | 0.1815 | 0.1586 | 1.586 |
| 1061.12(1) | 0.57(−1) | −1 | 0.396 | 0.396 | 1.2601 | 0.4878 | 0.4309 | 4.309 |
| 179.31(−1) | 1.43(1) | −1 | 0.396 | 0.396 | 1.2601 | 0.1528 | 0.1350 | 1.350 |
| 179.31)(−1) | 0.57(−1) | 1 | 0.396 | 0.396 | 1.3354 | 0.4230 | 0.3526 | 3.526 |
| 1127.66(r) | 1.0(0) | 0 | 0.716 | −0.604 | 1.3347 | 0.3338 | 0.2784 | 2.784 |
| 112.77(−r) | 1.0(0) | 0 | 0.716 | −0.604 | 1.3524 | 0.1818 | 0.1496 | 1.496 |
| 620.21(0) | 1.5(r) | 0 | −0.604 | 0.716 | 1.3291 | 0.2265 | 0.1897 | 1.897 |
| 620.21(0) | 0.5(−r) | 0 | −0.604 | 0.716 | 1.3036 | 0.5774 | 0.4930 | 4.930 |
| 620.21(0) | 1.0(0) | 0 | −0.604 | −0.604 | 1.3211 | 0.3670 | 0.3092 | 3.092 |
| 620.21(0) | 1.0(0) | 0 | −0.604 | −0.604 | 1.3249 | 0.3189 | 0.2679 | 2.679 |
| 620.21(0) | 1.0(0) | 0 | −0.604 | −0.604 | 1.3363 | 0.3126 | 0.2603 | 2.603 |
| Regression Equation Parameters | Test for Lack of Fit of Density Model | Equation Parameter Hypothesis Test | |||
|---|---|---|---|---|---|
| b0 | 2.750 | SR | 0.301 | F1 | 13.601 |
| b1 | 0.376 | ST | 13.243 | F2 | 153.131 |
| b2 | −1.262 | SLf | 0.163 | F12 | 0.037 |
| b12 | −0.137 | Se | 0.138 | F11 | 14.276 |
| b11 | −0.533 | FLf | 0.786 | F22 | 9.481 |
| b22 | 0.434 | fR | 5 | F | 43.971 |
| FT | 5 | ||||
| fLf | 3 | ||||
| fe | 2 | ||||
| Z1 [g/m3] (x1) | Z1 [m] (x2) | x1x2 | x1’ | x2’ | Transmitted Energy [J] | Echo Energy [J] | Normalized Echo Energy [J] | Decuple Normalized Echo Energy [J] |
|---|---|---|---|---|---|---|---|---|
| 1061.12(1) | 1.43(1) | 1 | 0.396 | 0.396 | 1.3381 | 0.2098 | 0.1745 | 1.745 |
| 1061.12(1) | 0.57(−1) | −1 | 0.396 | 0.396 | 1.3362 | 0.5665 | 0.4718 | 4.718 |
| 179.31(−1) | 1.43(1) | −1 | 0.396 | 0.396 | 1.3506 | 0.1185 | 0.0977 | 0.977 |
| 179.31)(−1) | 0.57(−1) | 1 | 0.396 | 0.396 | 1.3301 | 0.3277 | 0.2742 | 2.742 |
| 1127.66(r) | 1.0(0) | 0 | 0.716 | −0.604 | 1.3468 | 0.3936 | 0.3253 | 3.253 |
| 112.77(−r) | 1.0(0) | 0 | 0.716 | −0.604 | 1.3531 | 0.1693 | 0.1393 | 1.393 |
| 620.21(0) | 1.5(r) | 0 | −0.604 | 0.716 | 1.3524 | 0.2002 | 0.1648 | 1.648 |
| 620.21(0) | 0.5(−r) | 0 | −0.604 | 0.716 | 1.3424 | 0.5427 | 0.4499 | 4.499 |
| 620.21(0) | 1.0(0) | 0 | −0.604 | −0.604 | 1.3512 | 0.3146 | 0.2591 | 2.591 |
| 620.21(0) | 1.0(0) | 0 | −0.604 | −0.604 | 1.3569 | 0.2879 | 0.2361 | 2.361 |
| 1061.12(1) | 1.43(1) | 0 | −0.604 | −0.604 | 1.3426 | 0.3253 | 0.2697 | 2.697 |
| Regression Equation Parameters | Test for Lack of Fit of Density Model | Equation Parameter Hypothesis Test | |||
|---|---|---|---|---|---|
| b0 | 2.602 | SR | 0.144 | F1 | 121.882 |
| b1 | 0.735 | ST | 14.193 | F2 | 328.565 |
| b2 | −1.207 | SLf | 0.085 | F12 | 0.182 |
| b12 | −0.302 | Se | 0.059 | F11 | 9.270 |
| b11 | −0.280 | FLf | 0.963 | F22 | 9.915 |
| b22 | 0.290 | fR | 5 | F | 95.589 |
| fT | 5 | ||||
| fLf | 3 | ||||
| fe | 2 | ||||
| Density [g/m3] | Distance [m] | Normalized Echo Energy [J] | Model Equation with Three Layers | Model Equation with Four Layers | ||
|---|---|---|---|---|---|---|
| Calculated Value [J] | Relative Error [%] | Calculated Value [J] | Relative Error [%] | |||
| 1061.12 | 1.43 | 0.1586 | 0.2099 | 32.35 | 0.1896 | 19.57 |
| 1061.12 | 0.57 | 0.4309 | 0.4513 | 4.74 | 0.4420 | 2.59 |
| 179.31 | 1.43 | 0.1350 | 0.0628 | 53.47 | 0.1168 | 13.50 |
| 179.31 | 0.57 | 0.3526 | 0.3042 | 13.71 | 0.3692 | 4.71 |
| 1127.66 | 1.0 | 0.2784 | 0.3036 | 9.06 | 0.2606 | 6.38 |
| 112.77 | 1.0 | 0.1496 | 0.1343 | 10.23 | 0.1768 | 18.14 |
| 620.21 | 1.50 | 0.1897 | 0.1549 | 18.33 | 0.2012 | 6.08 |
| 620.21 | 0.50 | 0.4930 | 0.4356 | 11.64 | 0.4947 | 0.34 |
| 620.21 | 1.0 | 0.3092 | 0.2560 | 17.19 | 0.2892 | 6.45 |
| 620.21 | 1.0 | 0.2679 | 0.2560 | 4.43 | 0.2892 | 7.96 |
| 620.21 | 1.0 | 0.2603 | 0.2560 | 1.66 | 0.2892 | 11.10 |
| Density [g/m3] | Distance [m] | Normalized Echo Energy [J] | Model Equation with Three Layers | Model Equation with Four Layers | ||
|---|---|---|---|---|---|---|
| Calculated Value [J] | Relative Error [%] | Calculated Value [J] | Relative Error [%] | |||
| 1061.12 | 1.43 | 0.1745 | 0.2192 | 25.60 | 0.1608 | 7.87 |
| 1061.12 | 0.57 | 0.4718 | 0.4560 | 3.37 | 0.4304 | 8.78 |
| 179.31 | 1.43 | 0.0977 | 0.0721 | 26.14 | 0.0882 | 9.75 |
| 179.31 | 0.57 | 0.2742 | 0.3089 | 12.64 | 0.3478 | 26.83 |
| 1127.66 | 1.0 | 0.3253 | 0.3101 | 4.67 | 0.2504 | 23.02 |
| 112.77 | 1.0 | 0.1393 | 0.1408 | 1.09 | 0.1568 | 12.54 |
| 620.21 | 1.50 | 0.1648 | 0.1648 | 0.01 | 0.1711 | 3.85 |
| 620.21 | 0.50 | 0.4499 | 0.4401 | 2.19 | 0.4846 | 7.71 |
| 620.21 | 1.0 | 0.2591 | 0.2625 | 1.32 | 0.2692 | 3.88 |
| 620.21 | 1.0 | 0.2361 | 0.2625 | 11.18 | 0.2692 | 14.00 |
| 620.21 | 1.0 | 0.2697 | 0.2625 | 2.65 | 0.2692 | 0.19 |
| Density [g/m3] | Distance [m] | Transmitted Energy [J] | Echo Energy [J] | Normalized Echo Energy [J] | Model Value [J] | Relative Error [%] |
|---|---|---|---|---|---|---|
| 319.15 | 0.8 | 1.3330 | 0.3631 | 0.3032 | 0.3076 | 1.46 |
| 319.15 | 1.2 | 1.3330 | 0.2002 | 0.1672 | 0.1902 | 13.78 |
| 478.72 | 0.8 | 1.3215 | 0.3886 | 0.3273 | 0.3402 | 3.92 |
| 478.72 | 1.2 | 1.3271 | 0.2540 | 0.2130 | 0.2228 | 4.59 |
| 744.68 | 0.8 | 1.3087 | 0.4354 | 0.3703 | 0.3634 | 1.88 |
| 744.68 | 1.2 | 1.3267 | 0.2500 | 0.2098 | 0.2460 | 17.26 |
| 904.26 | 0.8 | 1.3153 | 0.3995 | 0.3381 | 0.3587 | 6.10 |
| 904.26 | 1.2 | 1.3285 | 0.2448 | 0.2050 | 0.2413 | 17.68 |
| Density [g/m3] | Distance [m] | Transmitted Energy [J] | Echo Energy [J] | Normalized Echo Energy [J] | Model Value [J] | Relative Error [%] |
|---|---|---|---|---|---|---|
| 319.15 | 0.8 | 1.2742 | 0.3378 | 0.2951 | 0.3076 | 4.26 |
| 319.15 | 1.2 | 1.3317 | 0.1985 | 0.1659 | 0.1902 | 14.63 |
| 478.72 | 0.8 | 1.3245 | 0.4098 | 0.3444 | 0.3402 | 1.23 |
| 478.72 | 1.2 | 1.3256 | 0.2112 | 0.1773 | 0.2228 | 25.64 |
| 744.68 | 0.8 | 1.3112 | 0.3698 | 0.3139 | 0.3634 | 15.78 |
| 744.68 | 1.2 | 1.3274 | 0.2372 | 0.1989 | 0.2460 | 23.68 |
| 904.26 | 0.8 | 1.3192 | 0.3754 | 0.3168 | 0.3587 | 13.24 |
| 904.26 | 1.2 | 1.3211 | 0.2936 | 0.2474 | 0.2413 | 2.46 |
| Density [g/m3] | Distance [m] | Transmitted Energy [J] | Echo Energy [J] | Normalized Echo Energy [J] | Model Value [J] | Relative Error [%] |
|---|---|---|---|---|---|---|
| 319.15 | 0.8 | 1.3285 | 0.3267 | 0.2737 | 0.3076 | 12.41 |
| 319.15 | 1.2 | 1.3235 | 0.2340 | 0.1967 | 0.1902 | 3.31 |
| 478.72 | 0.8 | 1.3184 | 0.3805 | 0.3213 | 0.3402 | 5.88 |
| 478.72 | 1.2 | 1.3272 | 0.2189 | 0.1836 | 0.2228 | 21.33 |
| 744.68 | 0.8 | 1.3155 | 0.3546 | 0.3000 | 0.3634 | 21.13 |
| 744.68 | 1.2 | 1.3260 | 0.2416 | 0.2028 | 0.2460 | 21.31 |
| 904.26 | 0.8 | 1.3077 | 0.3939 | 0.3352 | 0.3587 | 6.99 |
| 904.26 | 1.2 | 1.3221 | 0.2365 | 0.1991 | 0.2413 | 21.17 |
| Density [g/m3] | Distance [m] | Transmitted Energy [J] | Echo Energy [J] | Normalized Echo Energy [J] | Model Value [J] | Relative Error [%] |
|---|---|---|---|---|---|---|
| 319.15 | 0.8 | 1.3148 | 0.3293 | 0.2788 | 0.3076 | 10.35 |
| 319.15 | 1.2 | 1.3806 | 0.2306 | 0.1859 | 0.1902 | 2.32 |
| 478.72 | 0.8 | 1.3110 | 0.3378 | 0.2867 | 0.3402 | 18.63 |
| 478.72 | 1.2 | 1.3852 | 0.2232 | 0.1793 | 0.2228 | 24.21 |
| 744.68 | 0.8 | 1.3248 | 0.3541 | 0.2975 | 0.3634 | 22.15 |
| 744.68 | 1.2 | 1.3363 | 0.2343 | 0.1951 | 0.2460 | 26.04 |
| 904.26 | 0.8 | 1.3202 | 0.3275 | 0.2761 | 0.3587 | 29.92 |
| 904.26 | 1.2 | 1.3277 | 0.2611 | 0.2188 | 0.2413 | 10.26 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Zhai, C.; Weckler, P.; Wang, N.; Yang, S.; Zhang, B. A Canopy Density Model for Planar Orchard Target Detection Based on Ultrasonic Sensors. Sensors 2017, 17, 31. https://doi.org/10.3390/s17010031
Li H, Zhai C, Weckler P, Wang N, Yang S, Zhang B. A Canopy Density Model for Planar Orchard Target Detection Based on Ultrasonic Sensors. Sensors. 2017; 17(1):31. https://doi.org/10.3390/s17010031
Chicago/Turabian StyleLi, Hanzhe, Changyuan Zhai, Paul Weckler, Ning Wang, Shuo Yang, and Bo Zhang. 2017. "A Canopy Density Model for Planar Orchard Target Detection Based on Ultrasonic Sensors" Sensors 17, no. 1: 31. https://doi.org/10.3390/s17010031
APA StyleLi, H., Zhai, C., Weckler, P., Wang, N., Yang, S., & Zhang, B. (2017). A Canopy Density Model for Planar Orchard Target Detection Based on Ultrasonic Sensors. Sensors, 17(1), 31. https://doi.org/10.3390/s17010031