ROSA: Resource-Oriented Service Management Schemes for Web of Things in a Smart Home


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Enables service Mashups: By using Web techniques, developers can access sensor modules or control the surroundings without having to spend a lot of time learning and integrating all kinds of vendor-dependent architectures or communication protocols in the home network [16,17]. As reported in [2], it is quite difficult to coordinate all kinds of smart devices to perform services in the contemporary smart environment and the greatest benefit of WoT is to develop such services using the service Mashup approach through the standard Web interfaces.
- Eases loading of Web Things: To understand the overall context of client/server interactions in a Web application, it is also desirable to keep the session states. As noted by Fielding et al., HTTP is a stateless client/server protocol in the sense that “each request from client to server must contain all of the information necessary to under stand the request. [18]” In practice, many traditional Web applications keep session states on the server side, causing the heavy loading of the servers. Thus, Fielding et al. also pointed out that, in REST architecture, the session states should not be stored on the server and thus the states are kept entirely on the client side [18]. This feature happens to be appropriate to the pervasive environment: the computing and storage capabilities of the client (such as Home Gateway or user’s handset) that is used to deploy the applications, are usually more powerful than that of the server side (the Web things such as the embedded sensor modules or smart appliances).
- Promotes flexibility of applications: As mentioned, while the session states are maintained at the Web clients, if the Web Thing B joins after the Web Thing A, which is the same function, disappeared, the state of its existence will not be affected for the client. Besides, the resource A can be used to substitute the failed B, given that these two different resources produce the same results. Note that deciding if two resources are equivalent is not a non-trivial task and is out of the scope of this paper. More discussions on this limitation is taken up in Section 6.4.
- Makes the environment programmable via Web technologies: Previously, the barriers of creating services in a pervasive environment are high because of many existing and incompatible standards (e.g., X 10, Jini, and LonWorks). Nowadays, most developers are familiar with the Web technologies such as HTTP, JavaScript, Ajax, JSON, and XML. In a WoT-enabled pervasive environment, all Web Things can be accessed and managed programmatically via existing well-founded Web technologies.
2. Related Work
3. Preliminary
3.1. The REST Architecture and Its Maturity Model
3.2. Formal Notations for RESTful Services
- This work introduces a new semantic symbol “|” for denoting multiple responses. This enables one to specify group communications (e.g., HTTPMU) or to denote alternate behaviors (e.g., how the resources react to errors or the default behaviors for unexpected requests). Also, we introduce a new semantic symbol for A-URI [57] for group communication. A head (e.g., ) added to a URI name denotes that it is an A-URI.
- The action concatenation symbol “/” is replaced by a bump equation “≎” as “/” appears frequently in URIs.
- We introduce a prefix for each action, c for Web client and for a root resource, to denote the performer of an action.
- We introduce the symbol of an empty set “∅”.
- Variable names are modified so that the expressions are easier to understand. For example, we use , , and to denote the parameter sets of requests, responses, and errors, respectively.
4. Baseline Service Management Scheme
4.1. Discovery
4.2. Description
4.3. Control
4.4. Eventing
4.5. Discussion
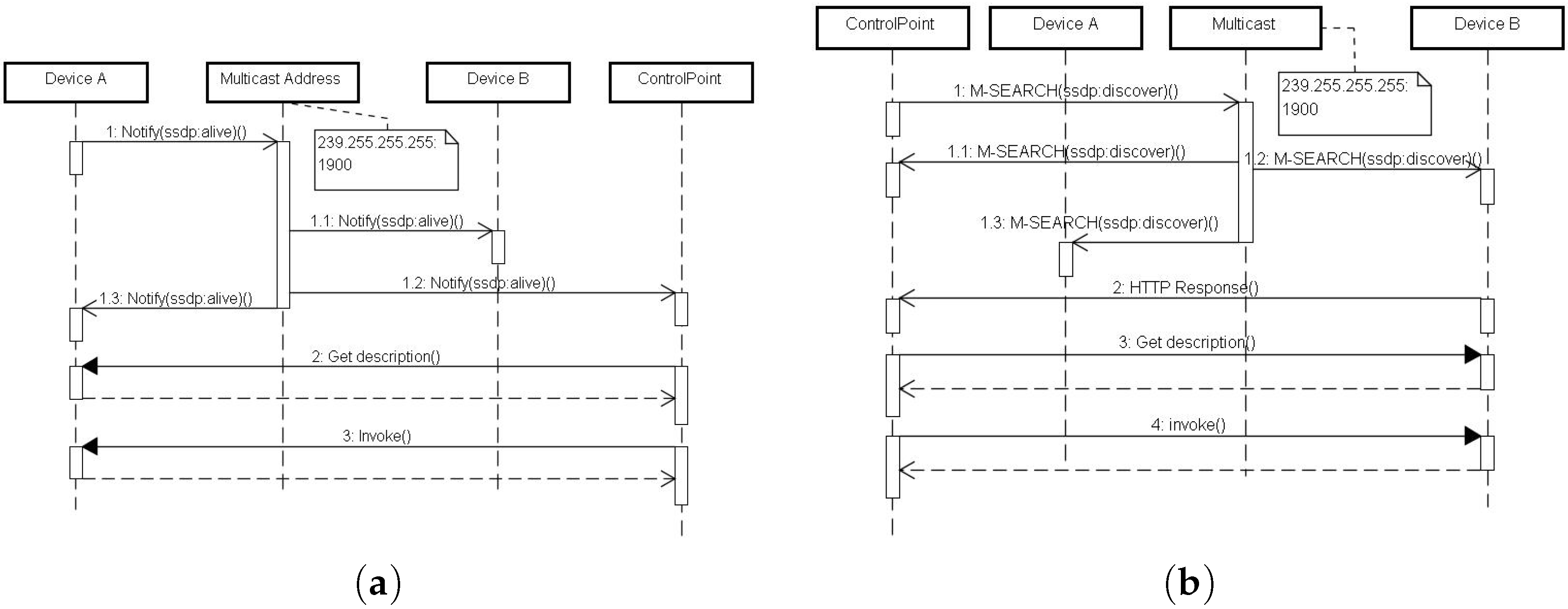
- Proprietary way of client state transfer: After a Control Point (the client) finds a UPnP Device, the next step is to retrieve the description document revealing the services that can be invoked. To be precise, to follow the HATEOAS convention the URI i of the description document in Expression (7) should be obtained using hypermedia controls and thus following either following the Web Linking (RFC 5988) [75] or the ATOM (RFC 4287) to ensure interpretability. Unfortunately, UPnP does not follow the HATEOAS convention and only offers a “fake hypermedia” [8] (i.e., a proprietary way of URI provision), leading to the disqualification of RMM Level 3 (Hypermedia Controls).
- Proprietary extension and the overloading of HTTP verbs: UPnP uses a lot of non-standard HTTP verbs for supporting discovery (NOTIFY and M-SEARCH, see Expressions (4)–(6)) and eventing (SUBSCRIBE, UNSUBSCRIBE, and NOTIFY, see Expressions (9) and (10)). On the contrary, as can be observed in Expression (8), UPnP makes use of an overloaded POST for all remote invocations without considering the semantics of these calls. Also note that in the design of UPnP, there is some illegal use of HTTP response code. For example, in Expressions (6), (9) and (10)), the responses do not contain any body and thus they should return 204 No Content instead of 200 OK. The issues mentioned above cause the disqualification of RMM Level 2 (HTTP Verbs).
- Singular service endpoint: In UPnP, there is one endpoint for each service, in other words, no matter how many embedded UPnP Actions does a service provides, the only way to access these Actions is through the URI. To call an Action, the invocation contexts are wrapped in the body of a POST request to the URI (see Expression (8)). As a result, a UPnP device is not designed as a Web Resource and thus prevent UPnP from conforming to RMM Level 1 (Resources).
5. Resource-Oriented Service Administration
- POST /_urn:my-domain:serviceId:DimmingService HTTP/1.1
- Host: LIGHT-IP
- <envelope>
- <body>
- <GetBrightnessLevel><RetBrightnessLevelStatus/></GetBrightnessLevel>
- <body>
- <envelope>
- GET /LightDevice/DimmingService/Brightness HTTP/1.1
- Host: LIGHT_IP.
- Listing 1: The BNF of URIs of ROSA resources, PCHAR denotes printable characters, SERVER is the Server-based Naming Authority of the form <userinfo>@<host>:<port>falselst:ROSAURI
- ROSA_URI = ’http://’ SERVER ROOT_DEVICE [EBD_DEVICE]
- SERVICE STAT_VAR [ ’?’ QUERY_PARAMS ]
- ROOT_DEVICE = ’/’ *PCHAR
- EBD_DEVICE = ’/’ *PCHAR *[’/’ *PCHAR ]
- SERVICE = ’/’ *PCHAR
- STAT_VAR = ’/’ *PCHAR
- QUERY_PARAMS = *PCHAR ’=’ *PCHAR
5.1. Discovering and Describing Things
- PUT /registry HTTP/1.1
- Host: 239.255.255.250:1900
- URI: (URI of the device)
- Link: <http://192.168.4.101:60001/wadl>;rel="http://percomlab.org/rosa/api"
5.2. Controlling Things
5.3. Notification from Things
6. Evaluation
6.1. Web Friendliness
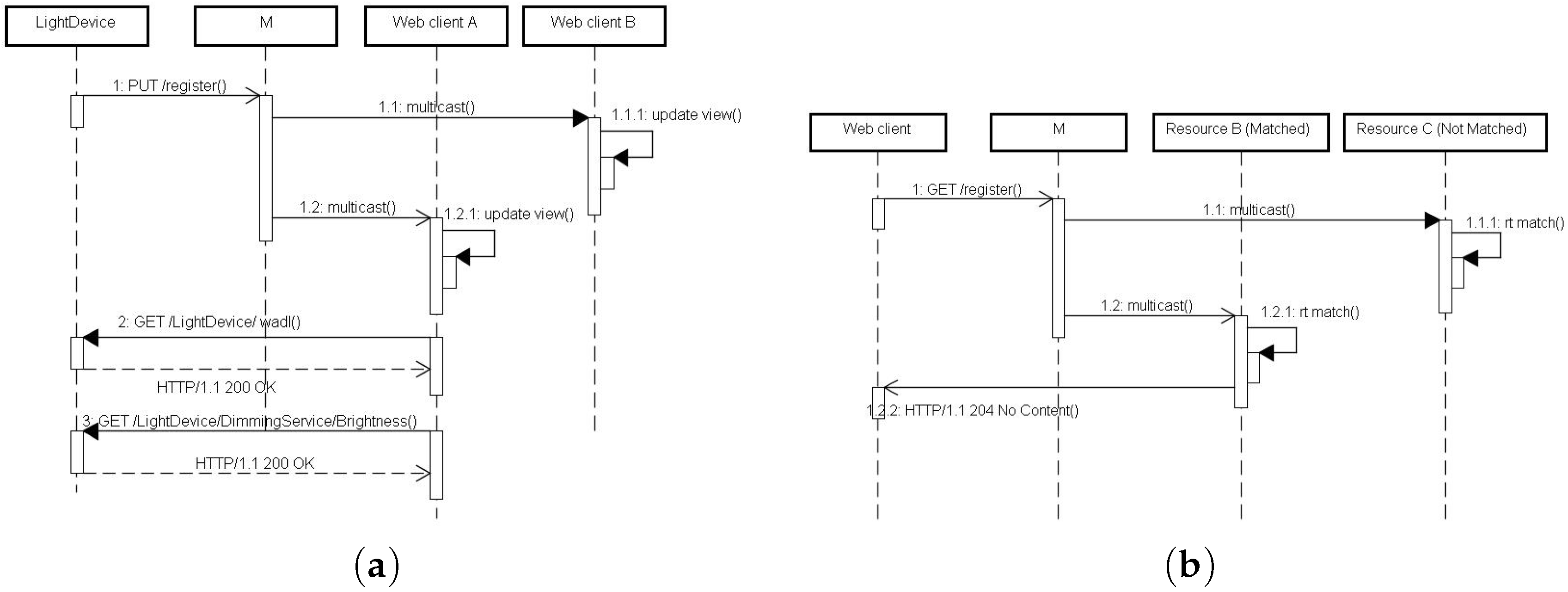
- Discovering and describing things: Main tasks of discovering and describing things include PA, LA, proactive search, and accessing description document. Expressions (11)–(14) respectively specify the behaviors of PA, LA, proactive search, and the access of description document in ROSA. By introducing the concept of A-URI, the multicast address is seen as a resource, making the design conform to RMM Level 1. Furthermore, the design conforms to Level 2 as all non-standard HTTP verbs such as NOTIFY and M-SEARCH are replaced by canonical HTTP verbs (PUT and GET) (see Expressions (11), (13) and (14). Finally, both the request messages (Expression (14)) provide Web Link to the description document of the resources so that they reveal HATEOAS semantics. In other words, in ROSA, PA/LA and proactive search are RMM Level 3. In the case of description, the conformance to RMM Level 3 depends on the description format. For example, if WTM is used, then describing things in ROSA is RMM Level 3: in WTM, there is a “link” attribute for navigating to another resource.
- Controlling things: Key tasks of controlling things include getting the status of a service variable and change the state of the variable which is respectively specified in Expressions (15) and (16). It is obvious to see that, in ROSA, the schemes of controlling things conform to RMM Level 1 as the variable is also exposed as resources and can be accessed via URIs (i.e., in Expressions (15) and (16)). The design also conforms to Level 2 as overloaded POSTs are replaced by canonical HTTP verbs (PUT for changing the states and GET for querying the states). Note that there is no HATEOAS semantics for controlling things as the subsequent control commands should be sent to the same URI.
- Notification from things: Notification in ROSA includes subscribing a specific state change event of a service variable and publishing state change events to the subscribers. According to Expressions (17) and (18), a service variable that can be observed and the set of targets of notification are modeled as resources, respectively and . Thus, notification in ROSA conforms to RMM level 1. Furthermore, the design also conforms to RMM level 2 as there is only one canonical HTTP verb PUT used in our design: for both modifying the observer list of a service variable and notifying the state change events. Subscribing a state change in ROSA is RMM level 3 because a URI, denoted by i in the response part of Expression (17), is provided for tracking the subscription. Again, the notification part is not RMM level 3 as there is no HATEOAS semantics for event notification in the baseline scheme (i.e., GENA).
6.2. Application Prototype
- 1
- 2
- let measurements = ..// a map of latest measurements of nodes
- 3
- let nodes = ...// get a list of names in the ZigBee network periodically
- 4
- 5
- router.get(’:node/TemperatureService/measurement’, function (req, res, next) {
- 6
- 7
- 8
- nodes.forEach((node)=>{
- 9
- if(node === req.params.node) {
- 10
- let responseMessage = {};
- 11
- responseMessage.temperature = measurements [node];
- 12
- res.status (200).json (responseMessage);
- 13
- next();
- 14
- }
- 15
- });
- 16
- 17
- responseMessage.description = "No Such Node.";
- 18
- res.status(404). json (responseMessage);
- 19
- next();
- 20
- });
- 21
- ...
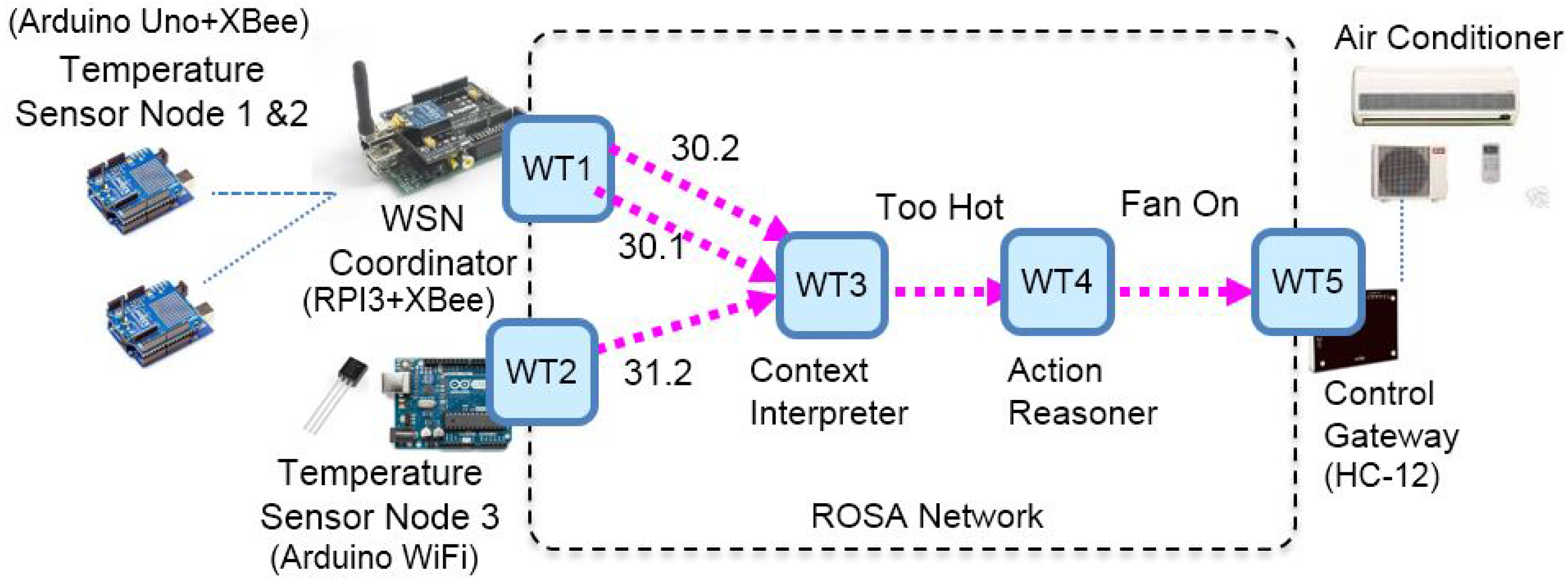
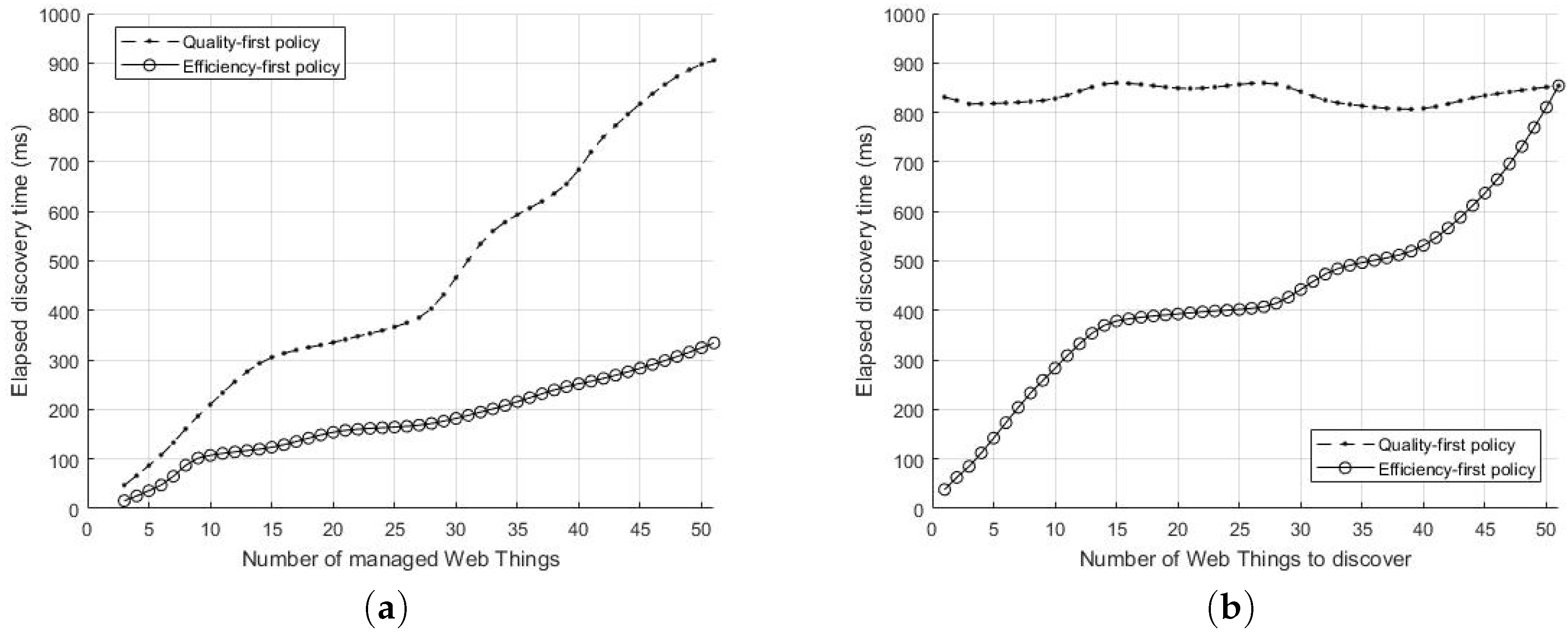
6.3. Experimental Section
6.4. Costs and Limitations
6.4.1. Compatibility with LLN
6.4.2. Node Counts
6.4.3. Security and Privacy
6.4.4. Interoperability
6.4.5. Service Composition
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| 6LoWPAN | IPv6 over Low-Power Wireless Personal Area Networks |
| A-URI | Abstract URI |
| C-URI | Concrete URI |
| GENA | General Event Notification Architecture |
| HATEOAS | Hypermedia As The Engine Of Application State |
| HTTPMU | HTTP over UDP Multicast |
| HTTPU | HTTP over UDP |
| IoT | Internet of Things |
| PA/LA | Presence Announcement/Leave Announcement |
| REST | Representational State Transfer |
| ROSA | Resource Oriented Service Administration |
| RMM | Richardson Maturity Model |
| SSDP | Simple Service Discovery Protocol |
| UPnP | Universal Plug and Play |
| WoT | Web of Things |
| WTM | Web Things Model |
References
- Van Gurp, J.; Prehofer, C.; Di Flora, C. Experiences with realizing smart space Web service applications. In Proceedings of the Consumer Communications and Networking Conference, Las Vegas, NV, USA, 10–12 January 2008; pp. 1171–1175. [Google Scholar]
- Guinard, D.; Trifa, V.; Wilde, E. A resource oriented architecture for the web of things. In Proceedings of the Internet of Things (IoT), Tokyo, Japan, 29 November–1 December 2010; pp. 1–8. [Google Scholar]
- O’Reilly, T.; Musser, J. What is Web 2.0? In Online Communication and Collaboration: A Reader; Routledge: London, UK, 2010. [Google Scholar]
- Yu, J.; Benatallah, B.; Casati, F.; Daniel, F. Understanding mashup development. IEEE Internet Comput. 2008, 12. [Google Scholar] [CrossRef]
- Trifa, V.; Wieland, S.; Guinard, D.; Bohnert, T.M. Design and implementation of a gateway for web-based interaction and management of embedded devices. In Proceedings of the 2nd International Workshop on Sensor Network Engineering (IWSNE’09), Marina del Rey, CA, USA, 11 June 2009; pp. 1–14. [Google Scholar]
- Pautasso, C.; Zimmermann, O.; Leymann, F. Restful web services vs. big’web services: Making the right architectural decision. In Proceedings of the 17th International Conference on World Wide Web, Beijing, China, 21–25 April 2008; pp. 805–814. [Google Scholar]
- Fielding, R.T. Architectural Styles and the Design of Network-Based Software Architectures. Ph.D. Thesis, University of California, Irvine, CA, USA, 2000. [Google Scholar]
- Richardson, L.; Amundsen, M.; Amundsen, M.; Ruby, S. RESTful Web APIs; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2013. [Google Scholar]
- Richarddon, L.; Ruby, S. RESTful Web Services. Web Services for the Real World; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2007. [Google Scholar]
- Webber, J.; Parastatidis, S.; Robinson, I. REST in Practice: Hypermedia and Systems Architecture; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2010. [Google Scholar]
- Sholler, D. SOA User Survey: Adoption Trends and Characteristics; Gartner Group: Stamford, CT, USA, 2008; Volume 26. [Google Scholar]
- Wilde, E.; Pautasso, C. REST: From Research to Practice; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Guinard, D.; Trifa, V.; Mattern, F.; Wilde, E. From the internet of things to the web of things: Resource-oriented architecture and best practices. In Architecting the Internet of Things; Springer: Berlin/Heidelberg, Germany, 2011; pp. 97–129. [Google Scholar]
- Duquennoy, S.; Grimaud, G.; Vandewalle, J.J. The Web of Things: Interconnecting devices with high usability and performance. In Proceedings of the International Conference on IEEE Embedded Software and Systems, Zhejiang, China, 25–27 May 2009; pp. 323–330. [Google Scholar]
- Trifa, V.; Guinard, D.; Carrera, D. Web Thing Model; Technical Report; W3C Member Submission: Cambridge, MA, USA, 2015. [Google Scholar]
- Lu, C.H.; Hwang, T.; Hwang, I.S. IoT Inventor: A web-enabled composer for building IoT-enabled reconfigurable agentized services. In Proceedings of the 2016 IEEE International Conference on IEEE Consumer Electronics-Taiwan (ICCE-TW), Nantou, Taiwan, 27–29 May 2016; pp. 1–2. [Google Scholar]
- Ma, S.P.; Chen, P.Z.; Ma, Y.S.; Jiang, J.S. CARSB Portal: A Web-Based Software Tool to Composing Service Bricks and RESTful Services as Mobile Apps. In Proceedings of the 2016 International IEEE Computer Symposium (ICS), Chiayi, Taiwan, 15–17 December 2016; pp. 577–582. [Google Scholar]
- Fielding, R.T.; Taylor, R.N. Principled design of the modern Web architecture. ACM Trans. Internet Technol. (TOIT) 2002, 2, 115–150. [Google Scholar] [CrossRef]
- Caporuscio, M.; Funaro, M.; Ghezzi, C. Resource-oriented middleware abstractions for pervasive computing. In Proceedings of the 2012 IEEE International Conference on Software Science, Technology and Engineering (SWSTE), Herzlia, Israel, 12–13 June 2012; pp. 1–10. [Google Scholar]
- Kamilaris, A.; Pitsillides, A.; Trifa, V. The smart home meets the web of things. Int. J. Ad Hoc Ubiquitous Comput. 2011, 7, 145–154. [Google Scholar] [CrossRef]
- Shelby, Z.; Bormann, C. 6LoWPAN: The Wireless Embedded Internet; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Bormann, C.; Castellani, A.P.; Shelby, Z. Coap: An application protocol for billions of tiny internet nodes. IEEE Int. Comput. 2012, 16, 62–67. [Google Scholar] [CrossRef]
- Kamilaris, A.; Trifa, V.; Pitsillides, A. HomeWeb: An application framework for Web-based smart homes. In Proceedings of the 2011 18th International Conference on Telecommunications (ICT), Ayia Napa, Cyprus, 8–11 May 2011; pp. 134–139. [Google Scholar]
- Dimitrios, A.; Vasileios, G.; Dimitrios, G.; Ioannis, C. Employing Internet of Things technologies for building automation. In Proceedings of the 2012 IEEE 17th Conference on Emerging Technologies & Factory Automation (ETFA), Krakow, Poland, 17–21 September 2012; pp. 1–8. [Google Scholar]
- Mathew, S.S.; Atif, Y.; Sheng, Q.Z.; Maamar, Z. Web of things: Description, discovery and integration. In Proceedings of the 2011 International Conference on Internet of Things (iThings/CPSCom), and 4th International Conference on Cyber, Physical and Social Computing, Dalian, China, 19–22 October 2011; pp. 9–15. [Google Scholar]
- Donoho, A.; Bryan, R.; Maarten, B.; John, G.; Alan, M.; YoonSoo, K.; Bruce, F.; Jonathan, T. Upnp Device Architecture 2.0; Open Connectivity Foundation: Beaverton, OR, USA, 2015. [Google Scholar]
- Zigbee Alliance. Zigbee Specification; ZigBee Document 053474r13; ZigBee Alliance, Inc.: San Ramon, CA, USA, 2006. [Google Scholar]
- Ishaq, I.; Hoebeke, J.; Van den Abeele, F.; Moerman, I.; Demeester, P. Group communication in constrained environments using CoAP-based entities. In Proceedings of the 2013 IEEE International Conference on Distributed Computing in Sensor Systems (DCOSS), Cambridge, MA, USA, 20–23 May 2013; pp. 345–350. [Google Scholar]
- Song, H.; Kim, D.; Lee, K.; Sung, J. UPnP-based sensor network management architecture. In Proceedings of the International Conference on Mobile Computing and Ubiquitous Networking, Osaka, Japan, 13–15 April 2005. [Google Scholar]
- Klein, U.; Namjoshi, K.S. Formalization and automated verification of RESTful behavior. In Proceedings of the International Conference on Computer Aided Verification, Snowbird, UT, USA, 14–20 July 2011; pp. 541–556. [Google Scholar]
- Fowler, M. Richardson Maturity Model: Steps Toward the Glory of REST. 2010. Available online: https://martinfowler.com/articles/richardsonMaturityModel.html (accessed on 19 August 2017).
- Satyanarayanan, M. Pervasive computing: Vision and challenges. IEEE Pers. Commun. 2001, 8, 10–17. [Google Scholar] [CrossRef]
- Rodriguez-Mier, P.; Pedrinaci, C.; Lama, M.; Mucientes, M. An integrated semantic Web service discovery and composition framework. IEEE Trans. Serv. Comput. 2016, 9, 537–550. [Google Scholar] [CrossRef]
- Bellifemine, F.; Poggi, A.; Rimassa, G. Developing multi-agent systems with JADE. In Proceedings of the International Workshop on Agent Theories, Architectures, and Languages; Springer: Berlin/Heidelberg, Germany, 2000; pp. 89–103. [Google Scholar]
- Arnold, K.; Scheifler, R.; Waldo, J.; O’Sullivan, B.; Wollrath, A. Jini Specification; Addison-Wesley Longman Publishing Co.: Boston, MA, USA, 1999. [Google Scholar]
- Rapti, E.; Karageorgos, A.; Houstis, C.; Houstis, E. Decentralized service discovery and selection in Internet of Things applications based on artificial potential fields. Serv. Orient. Comput. Appl. 2016, 11, 1–12. [Google Scholar] [CrossRef]
- Castelli, G.; Mamei, M.; Rosi, A.; Zambonelli, F. Engineering pervasive service ecosystems: The SAPERE approach. ACM Trans. Auton. Adapt. Syst. (TAAS) 2015, 10, 1–27. [Google Scholar] [CrossRef]
- Zhu, F.; Mutka, M.W.; Ni, L.M. Service discovery in pervasive computing environments. IEEE Pervasive Comput. 2005, 4, 81–90. [Google Scholar]
- Nakamura, K.; Ogawa, M.; Koita, T.; Sato, K. Implementation and Evaluation of Caching Method to Increase the Speed of UPnP Gateway. In Proceedings of the IEEE/IFIP International Conference on Embedded and Ubiquitous Computing (EUC’08), Shanghai, China, 17–20 December 2008; Volume 1, pp. 112–118. [Google Scholar]
- Liao, C.F.; Chang, H.C.; Fu, L.C. Message-efficient service management schemes for MOM-based UPnP networks. IEEE Trans. Serv. Comput. 2013, 6, 214–226. [Google Scholar] [CrossRef]
- Hu, C.L.; Huang, Y.J.; Liao, W.S. Multicast complement for efficient UPnP eventing in home computing network. In Proceedings of the IEEE International Conference on Portable Information Devices (PORTABLE07), Orlando, FL, USA, 25–29 May 2007; pp. 1–5. [Google Scholar]
- Mazuryk, Y.; Lukkien, J.J. Analysis and improvements of the eventing protocol for universal plug and play. In Proceedings of the International Conference on Communications, Internet, and Information Technology, St. Thomas, ND, USA, 22–24 November 2004; pp. 419–424. [Google Scholar]
- Togias, K.; Goumopoulos, C.; Kameas, A. Ontology-based representation of upnp devices and services for dynamic context-aware ubiquitous computing applications. In Proceedings of the 2010 Third International Conference on Communication Theory, Reliability, and Quality of Service (CTRQ), Athens/Glyfada, Greece, 13–19 June 2010; pp. 220–225. [Google Scholar]
- Kindberg, T.; Barton, J.; Morgan, J.; Becker, G.; Caswell, D.; Debaty, P.; Gopal, G.; Frid, M.; Krishnan, V.; Morris, H.; et al. People, places, things: Web presence for the real world. Mob. Netw. Appl. 2002, 7, 365–376. [Google Scholar] [CrossRef]
- Dawson-Haggerty, S.; Jiang, X.; Tolle, G.; Ortiz, J.; Culler, D. sMAP: A simple measurement and actuation profile for physical information. In Proceedings of the 8th ACM Conference on Embedded Networked Sensor Systems, Zürich, Switzerland, 3–5 November 2010; pp. 197–210. [Google Scholar]
- Gao, L.; Zhang, C.; Sun, L. RESTful Web of Things API in sharing sensor data. In Proceedings of the 2011 International Conference on IEEE Internet Technology and Applications (iTAP), Wuhan, China, 16–18 August 2011; pp. 1–4. [Google Scholar]
- Stirbu, V. Towards a restful plug and play experience in the web of things. In Proceedings of the 2008 IEEE International Conference on Semantic Computing, Santa Monica, CA, USA, 4–7 August 2008; pp. 512–517. [Google Scholar]
- Guinard, D.D.; Trifa, V.M. Building the Web of Things: With Examples in Node.js and Raspberry Pi; Manning Publications: Greenwich, CT, USA, 2016. [Google Scholar]
- Mulligan, G. The 6LoWPAN architecture. In Proceedings of the 4th Workshop on Embedded Networked Sensors, Cork, Ireland, 25–26 June 2007; pp. 78–82. [Google Scholar]
- Butt, T.A.; Phillips, I.; Guan, L.; Oikonomou, G. TRENDY: An adaptive and context-aware service discovery protocol for 6LoWPANs. In Proceedings of the Third International Workshop on the Web Of Things, Newcastle, UK, 19 June 2012; p. 2. [Google Scholar]
- Mäenpää, J.; Bolonio, J.J.; Loreto, S. Using RELOAD and CoAP for wide area sensor and actuator networking. EURASIP J. Wirel. Commun. Netw. 2012, 2012, 121. [Google Scholar] [CrossRef]
- Mietz, R.; Groppe, S.; Römer, K.; Pfisterer, D. Semantic models for scalable search in the internet of things. J. Sens. Actuator Netw. 2013, 2, 172–195. [Google Scholar] [CrossRef]
- Hasemann, H.; Kleine, O.; Kröller, A.; Leggieri, M.; Pfisterer, D. Annotating Real-World Objects Using Semantic Entities; Springer: Berlin/Heidelberg, Germany, 2013; pp. 67–82. [Google Scholar]
- Fu, W.; Chen, G.; Wang, P.; Hong, Y.; Ge, H. Improvement of Home Appliance Control System in Smart Home Based on 6LoWPAN. JCP 2014, 9, 183–188. [Google Scholar] [CrossRef]
- Chatzigiannakis, I.; Hasemann, H.; Karnstedt, M.; Kleine, O.; Kroller, A.; Leggieri, M.; Pfisterer, D.; Romer, K.; Truong, C. True self-configuration for the IoT. In Proceedings of the 2012 3rd International Conference on the IEEE Internet of Things (IOT), Wuxi, China, 24–26 October 2012; pp. 9–15. [Google Scholar]
- Coulson, G.; Porter, B.; Chatzigiannakis, I.; Koninis, C.; Fischer, S.; Pfisterer, D.; Bimschas, D.; Braun, T.; Hurni, P.; Anwander, M.; et al. Flexible experimentation in wireless sensor networks. Commun. ACM 2012, 55, 82–90. [Google Scholar] [CrossRef]
- Caporuscio, M.; Funaro, M.; Ghezzi, C. RESTful service architectures for pervasive networking environments. In REST: From Research to Practice; Springer: Berlin/Heidelberg, Germany, 2011; pp. 401–422. [Google Scholar]
- Newmarch, J. A RESTful approach: Clean UPnP without SOAP. In Proceedings of the 2005 Second IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 6 January 2005; pp. 134–138. [Google Scholar]
- Ranganathan, A.; Campbell, R.H. Provably correct pervasive computing environments. In Proceedings of the Sixth Annual IEEE International Conference on IEEE Pervasive Computing and Communications, Hong Kong, China, 17–21 March 2008; pp. 160–169. [Google Scholar]
- Cardelli, L.; Gordon, A.D. Mobile ambients. Theor. Comput. Sci. 2000, 240, 177–213. [Google Scholar] [CrossRef]
- González, L.; Cubo, J.; Brogi, A.; Pimentel, E.; Ruggia, R. Run-time verification of behaviour-aware mashups in the internet of things. In Proceedings of the European Conference on Service-Oriented and Cloud Computing; Springer: Berlin/Heidelberg, Germany, 2013; pp. 318–330. [Google Scholar]
- Christian, P. Models at REST or modelling RESTful interfaces for the Internet of Things. In Proceedings of the 2015 IEEE 2nd World Forum on IEEE Internet of Things (WF-IoT), Milan, Italy, 14–16 December 2015; pp. 251–255. [Google Scholar]
- Christian, P.; Llias, G. Modeling Restful Web of Things Services: Concepts and Tools. In Managing the Web of Things: Linking the Real World to the Web; Morgan Kaufmann: Cambridge, MA, USA, 2017; pp. 73–104. [Google Scholar]
- Fielding, R.; Gettys, J.; Mogul, J.; Frystyk, H.; Masinter, L.; Leach, P.; Berners-Lee, T. Hypertext Transfer Protocol–HTTP/1.1; Technical Report; W3C: Cambridge, MA, USA, 1999. [Google Scholar]
- Navon, J.; Fernandez, F. The essence of REST architectural style. In REST: From Research to Practice; Springer: Berlin/Heidelberg, Germany, 2011; pp. 21–33. [Google Scholar]
- Rodríguez, C.; Baez, M.; Daniel, F.; Casati, F.; Trabucco, J.C.; Canali, L.; Percannella, G. REST APIs: A Large-Scale Analysis of Compliance with Principles and Best Practices. In Proceedings of the International Conference on Web Engineering; Springer: Berlin/Heidelberg, Germany, 2016; pp. 21–39. [Google Scholar]
- Bermbach, D.; Wittern, E. Benchmarking Web API Quality. In Proceedings of the International Conference on Web Engineering; Springer: Berlin/Heidelberg, Germany, 2016; pp. 188–206. [Google Scholar]
- Sayre, R. Atom: The standard in syndication. IEEE Internet Comput. 2005, 9, 71–78. [Google Scholar] [CrossRef]
- Masse, M. REST API Design Rulebook: Designing Consistent RESTful Web Service Interfaces; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2011. [Google Scholar]
- Li, L.; Chou, W. Design patterns for restful communication web services. In Proceedings of the 2010 IEEE International Conference on IEEE Web Services (ICWS), Miami, FL, USA, 5–10 July 2010; pp. 512–519. [Google Scholar]
- Nikaj, A.; Weske, M. Formal specification of RESTful choreography properties. In Proceedings of the International Conference on Web Engineering; Springer: Berlin/Heidelberg, Germany, 2016; pp. 365–372. [Google Scholar]
- Goland, Y.Y. Multicast and Unicast UDP HTTP Messages; Technical Report; IETF: Fremont, CA, USA, 1999. [Google Scholar]
- Box, D.; Ehnebuske, D.; Kakivaya, G.; Layman, A.; Mendelsohn, N.; Nielsen, H.F.; Thatte, S.; Winer, D. Simple Object Access Protocol (SOAP) 1.1; W3C: Cambridge, MA, USA, 2000. [Google Scholar]
- Gamma, E. Design Patterns: Elements of Reusable Object-Oriented Software; Pearson Education India: London, UK, 1995. [Google Scholar]
- Nottingham, M. Web linking: IETF Request for Comments: 5988; Internet Engineering Task Force: Fremont, CA, USA, 2010. [Google Scholar]
- Masinter, L.; Berners-Lee, T.; Fielding, R.T. Uniform Resource Identifier (URI): Generic Syntax; Network Working Group: Fremont, CA, USA, 2005. [Google Scholar]
- Hadley, M.J. Web Application Description Language (WADL); Sun Microsystems, Inc.: Menlo Park, CA, USA, 2006. [Google Scholar]
- Tilkov, S.; Vinoski, S. Node. js: Using JavaScript to build high-performance network programs. IEEE Internet Comput. 2010, 14, 80–83. [Google Scholar] [CrossRef]
- Balani, N.; Hathi, R. Apache Cxf Web Service Development: Develop and Deploy SOAP And RESTful Web Services; Packt Publishing Ltd.: Birmingham, UK, 2009. [Google Scholar]
- Mardan, A. Express.js Guide: The Comprehensive Book on Express.js; Apress: New York, NY, USA, 28 May 2014. [Google Scholar]
- Chuat, L.; Szalachowski, P.; Perrig, A.; Laurie, B.; Messeri, E. Efficient Gossip Protocols for Verifying the Consistency of Certificate Logs. In Proceedings of the IEEE Communications and Network Security (CNS), Florence, Italy, 28–30 September 2015. [Google Scholar]
- Ellison, C. UPnP Security Ceremonies Design Document; Open Connectivity Foundation, Inc.: Beaverton, OR, USA, 2003. [Google Scholar]
- Smid, M.E.; Branstad, D.K. Data Encryption Standard: Past and future. Proce. IEEE 1988, 76, 550–559. [Google Scholar] [CrossRef]
- Barker, W.C. Recommendation for the Triple Data Encryption Algorithm (TDEA) Block Cipher; NIST: Gaithersburg, MD, USA, 2008. [Google Scholar]
- Daemen, J. The Design of Rijndael: AES-the Advanced Encryption Standard; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Eastlake, D.; Jones, P. RFC 3174—US Secure Hash Algorithm 1 (SHA1); Network Working Group: Fremont, CA, USA, 2001. [Google Scholar]
- Liao, C.F.; Jong, Y.W.; Fu, L.C. Toward reliable service management in message-oriented pervasive systems. IEEE Trans. Serv. Comput. 2011, 4, 183–195. [Google Scholar] [CrossRef]
- Liao, C.F.; Cheng, H.H.; Fu, L.C. Unifiable Preference Expressions for Pervasive Service Composition. In Proceedings of the 2011 IEEE Asia-Pacific IEEE Services Computing Conference (APSCC), Jeju Island, South Korea, 12–15 December 2011; pp. 424–431. [Google Scholar]









© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, C.-F.; Chen, P.-Y. ROSA: Resource-Oriented Service Management Schemes for Web of Things in a Smart Home. Sensors 2017, 17, 2159. https://doi.org/10.3390/s17102159
Liao C-F, Chen P-Y. ROSA: Resource-Oriented Service Management Schemes for Web of Things in a Smart Home. Sensors. 2017; 17(10):2159. https://doi.org/10.3390/s17102159
Chicago/Turabian StyleLiao, Chun-Feng, and Peng-Yu Chen. 2017. "ROSA: Resource-Oriented Service Management Schemes for Web of Things in a Smart Home" Sensors 17, no. 10: 2159. https://doi.org/10.3390/s17102159
APA StyleLiao, C. -F., & Chen, P. -Y. (2017). ROSA: Resource-Oriented Service Management Schemes for Web of Things in a Smart Home. Sensors, 17(10), 2159. https://doi.org/10.3390/s17102159