A Multi-Objective Partition Method for Marine Sensor Networks Based on Degree of Event Correlation


Abstract
:1. Introduction
2. Related Work
3. Multi-Objective Balanced Partition Method for AB-Graph Based on NSGA-II
3.1. Construction of AB-Graph and Formulation of Multi-Objective Problems
3.1.1. Construction of AB-Graph
3.1.2. Formulation of Multi-Objective Functions
3.2. Individual Representation and Initialization
| Algorithm 1: Individual initialization algorithm |
| Input: Argo buoys in AB-Graph; The number of regions ; Maximum size of region Output: Individual of the population 1: The initial buoys are randomly selected and the value of the buoy in is set to ; 2: while (All the buoys belong to a certain region) 3: if (The last round has successfully added the buoy to the region) 4: for (Each region ) 5: if (A vertex , not belonging to any region, is connected to a vertex in and )) 6: Set the value of in the individual to be ; 7: end if 8: end for 9: else 10: for (Each region ) 11: if ( is not assigned and ) 12: Set the value of the buoy in the individual to be ; 13: end if 14: end for 15: end while 16: return |
3.3. Selection Operation
3.4. Cross Operation
| Algorithm 2: Cross operation algorithm for AB-Graph |
| Input: Mating pool Output: Next-generation individual 1: Two individuals and are randomly selected in 2: Randomly select a certain region in solution , and replace the value of the position of the region in as the value in the . The new solution is saved as a new individual 3: The new individual generated in 2 is re-labeled. It is judged whether the buoys in the same region are connected with each other, and if they are not connected, which will be labeled as a new region. 4: return |
3.5. Mutation Operation
| Algorithm 3: Mutation operation algorithm for AB-Graph |
| Input: Individual Output: Individual 1: Randomly select some border buoys belonging to one region in ; 2: for ( in ) 3: if ( and and ) 4: The buoy is transferred to the region to which belongs; 5: end if 6: end for 7: Re-label the affected region; 8: return |
4. Incremental Optimization Strategy for the Post-Partitioned AB-Graph
4.1. Expression Factor of the Correlation between Buoy and Region
4.2. Incremental Optimization Algorithm
| Algorithm 4: Incremental optimization algorithm for the post-partitioned AB-Graph |
| Input: Post-partitioned AB-Graph ; Set of new-added buoy ; Maximum size of region Output: Optimized 1: for(Each buoy in ) 2: for (Each region ) 3: Calculate the value when belongs by Definition 3; 4: end for 5: The buoy is placed in the region which has the maximum value , and expand its edge weight information; 6: if( and other regions with spare size) 7: Find the buoy with the smallest ; 8: for (Each region ) 9: if () 10: Calculate by Definition 1; 11: end if 12: end for 13: Place into the region with the maximum ; 14: else if ( and other regions are full) 15: Expand the value of ; 16: else if (() 17: Maintain the existing partitions. 18: end if 19: end for |
5. Experiment
5.1. Experimental Data and Environment
5.2. The Partition Quality and Running Time by Different Population Size and Number of Regions
5.3. Performance of the Proposed Method
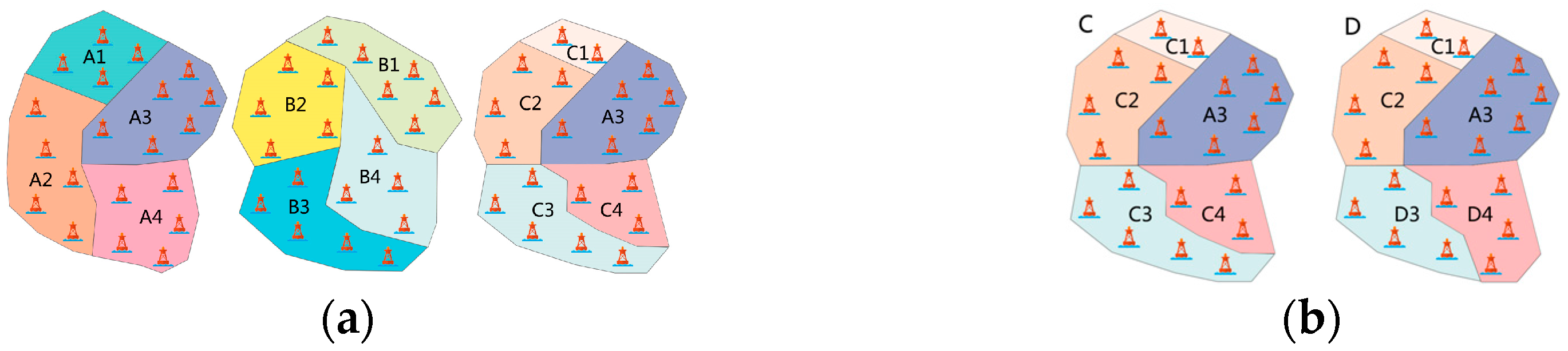
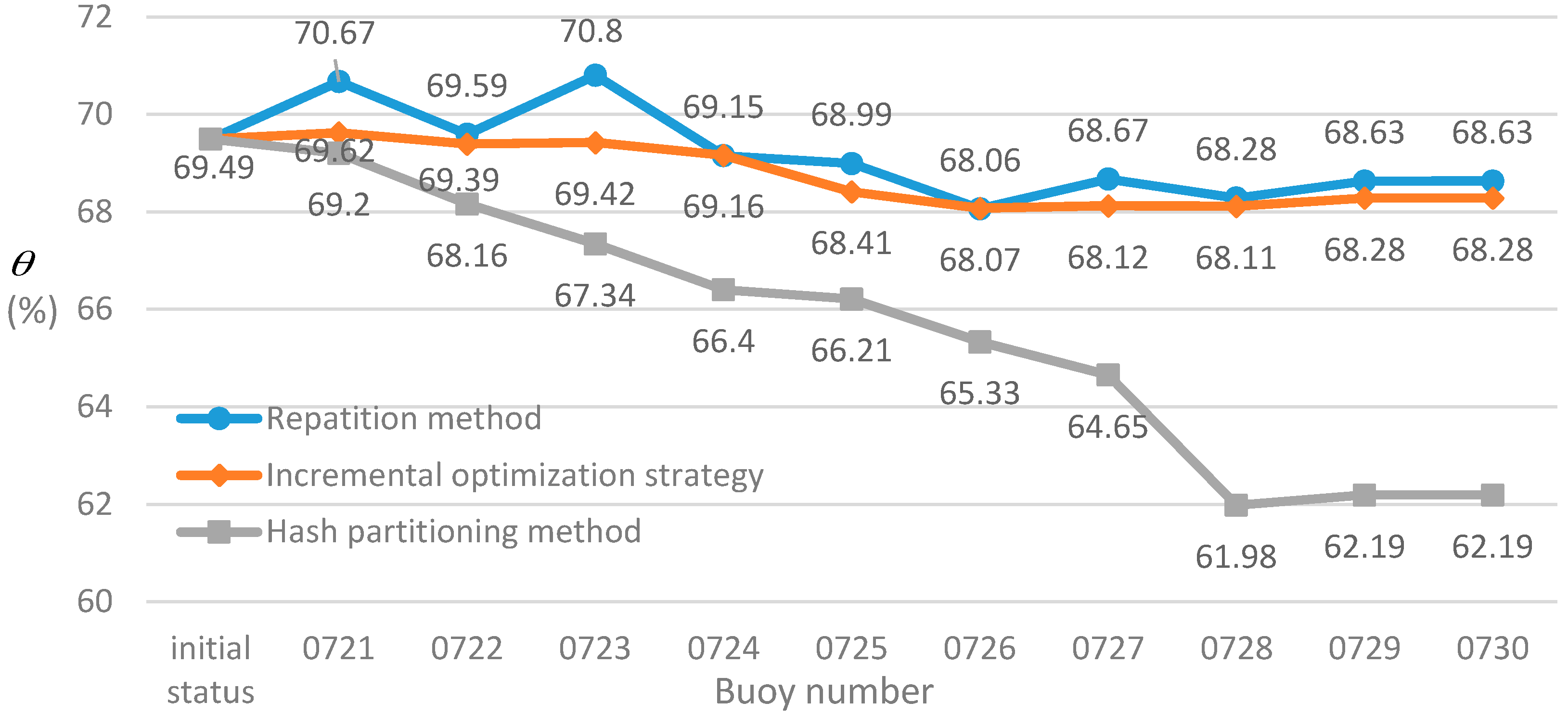
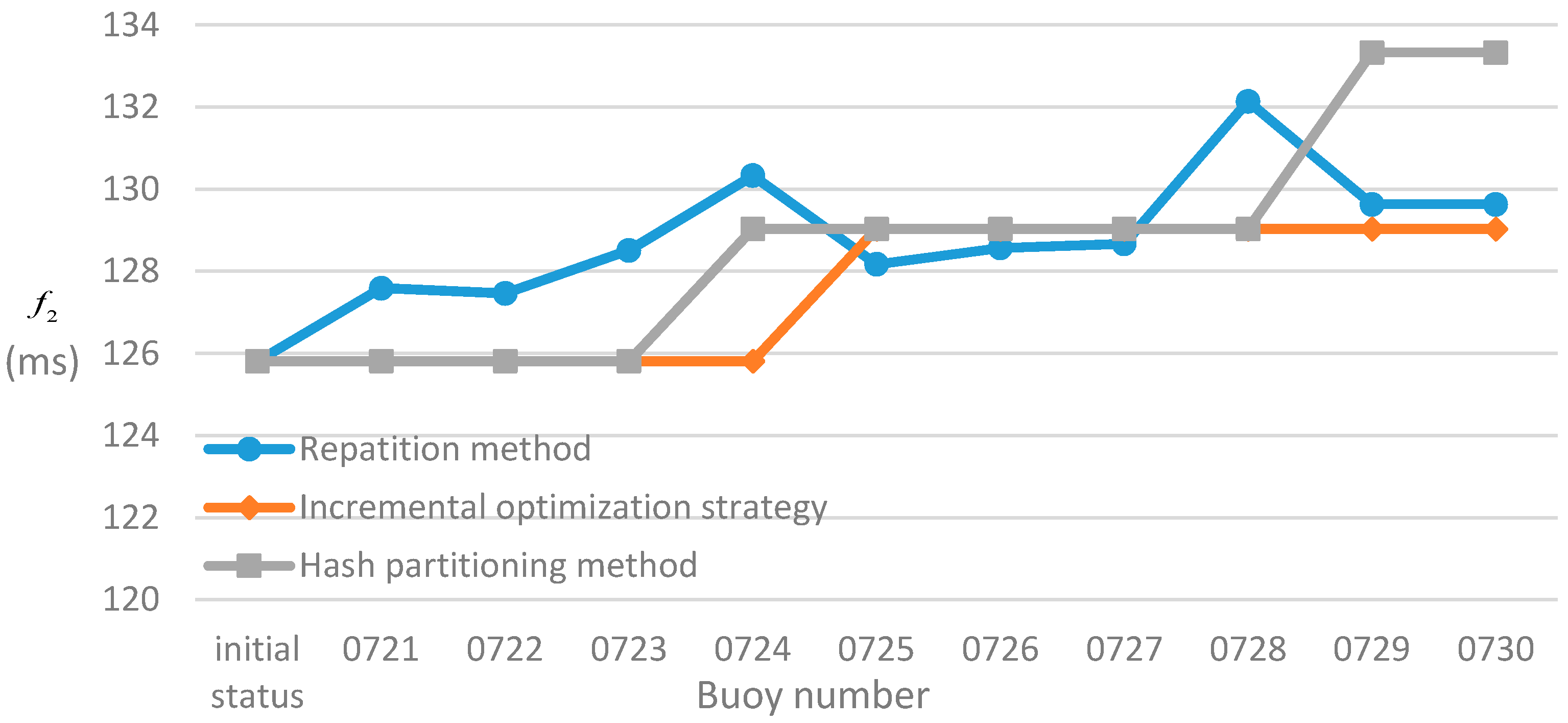
5.4. Effect Analysis of Incremental Optimization Strategy of Post-Partitioned AB-Graph
5.5. Verification of the Partitioning Effect
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Argo.ucsd.edu. What Is Argo? Available online: http://www.argo.ucsd.edu/ (accessed on 15 October 2016).
- The Demonstrate of Typhoon. Available online: http://www.wztf121.com/ (accessed on 15 October 2016).
- Huang, D.M.; Xu, C.Y.X.; Zhao, D.F.; Song, W.; He, Q. Multi-objective Balanced Partitioning Method for Marine Sensor Network. In Proceedings of the 2017 IEEE 14th International Conference on Networking, Sensing and Control (ICNSC), Calabria, Italy, 16–18 May 2017; pp. 586–592. [Google Scholar]
- Antonia, C.; Andrei, N. DAMAR: Information management system for marine data. In Proceedings of the OCEANS 2011 IEEE, Santander, Spain, 6–9 June 2011; pp. 1–6. [Google Scholar]
- Aguzzi, J.; Mànuel, A.; Condal, F. The new Seafloor Observatory (OBSEA) for remote and long-term coastal ecosystem monitoring. Sensors 2011, 11, 5850–5872. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Oh, J.S. Movement Monitoring System for Marine Buoy. J. Korea Inst. Inf. Commun. Eng. 2014, 18, 311–317. [Google Scholar] [CrossRef]
- Xu, G.; Shen, W.; Wang, X. Applications of wireless sensor networks in marine environment monitoring: A survey. Sensors 2014, 14, 16932–16954. [Google Scholar] [CrossRef] [PubMed]
- Novellino, A.; D’Angelo, P.; Benedetti, G. European marine observation data network—EMODnet physics. In Proceedings of the 2014 IEEE/OES Baltic International Symposium (BALTIC), Tallinn, Estonia, 27–29 May 2015; pp. 1–6. [Google Scholar]
- Palazov, A.; Stefanov, A.; Marinova, V. Bulgarian National Operational Marine Observing System. In Proceedings of the 2012 Oceans-Yeosu, Yeosu, Korea, 21–24 May 2012; pp. 1–9. [Google Scholar]
- Bosman, H.H.; Iacca, G.; Tejada, A. Ensembles of incremental learners to detect anomalies in ad hoc sensor networks. Ad Hoc Netw. 2015, 35, 14–36. [Google Scholar] [CrossRef]
- Bosman, H.H.; Iacca, G.; Tejada, A. Spatial anomaly detection in sensor networks using neighborhood information. Inf. Fusion 2017, 33, 41–56. [Google Scholar] [CrossRef]
- Meyerhenke, H.; Monien, B.; Schamberger, S. Graph partitioning and disturbed diffusion. Parallel Comput. 2009, 35, 544–569. [Google Scholar] [CrossRef]
- Spielman, D.A.; Teng, S.H. A local clustering algorithm for massive graphs and its application to nearly linear time graph partitioning. SIAM J. Comput. 2013, 42, 1–26. [Google Scholar] [CrossRef]
- Gehweiler, J.; Meyerhenke, H. A distributed diffusive heuristic for clustering a virtual P2P supercomputer. In Proceedings of the Parallel & Distributed Processing, Workshops and Phd Forum (IPDPSW), Atlanta, GA, USA, 19–23 April 2010; pp. 1–8. [Google Scholar]
- Karypis, G.; Kumar, V. A fast and high quality multilevel scheme for partitioning irregular graphs. SIAM J. Sci. Comput. 1998, 20, 359–392. [Google Scholar] [CrossRef]
- Rahimian, F.; Payberah, A.H.; Girdzijauskas, S.; Jelasity, M.; Haridi, S. Ja-be-ja: A distributed algorithm for balanced graph partitioning. In Proceedings of the Self-Adaptive and Self-Organizing Systems (SASO), Philadelphia, PA, USA, 9–13 September 2013; pp. 51–60. [Google Scholar]
- D’Amico, S.J.; Wang, S.J.; Batta, R.; Rump, C.M. A simulated annealing approach to police district design. Comput. Oper. Res. 2002, 29, 667–684. [Google Scholar] [CrossRef]
- Karypis, G.; Kumar, V.A. Parallel multilevel k-way partitioning scheme for irregular graphs. In Proceedings of the ACM/IEEE Conference on Supercomputing, Pittsburgh, PA, USA, 1 January 1996; p. 35. [Google Scholar]
- Rahimian, F.; Payberah, A.H.; Girdzijauskas, S.; Haridi, S. Distributed vertex-cut partitioning. In Proceedings of the IFIP International Conference on Distributed Applications and Interoperable Systems, Berlin, Germany, 3–5 June 2014; pp. 186–200. [Google Scholar]
- Carlini, E.; Dazzi, P.; Esposito, A.; Lulli, A.; Ricci, L. Balanced graph partitioning with apache spark. In Proceedings of the European Conference on Parallel Processing, Porto, Portugal, 25–29 August 2014; pp. 129–140. [Google Scholar]
- Ugander, J.; Backstrom, L. Balanced label propagation for partitioning massive graphs. In Proceedings of the Sixth ACM international Conference on Web Search and Data Mining, Rome, Italy, 4–8 February 2013; pp. 507–516. [Google Scholar]
- Stanton, I.; Kliot, G. Streaming graph partitioning for large distributed graphs. In Proceedings of the 18th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Beijing, China, 12–16 August 2012; pp. 1222–1230. [Google Scholar]
- Muyldermans, L.; Cattrysse, D.; Van Oudheusden, D.; Lotan, T. Districting for salt spreading operations. Eur. J. Oper. Res. 2002, 139, 521–532. [Google Scholar] [CrossRef]
- Soper, A.J.; Walshaw, C.; Cross, M. A combined evolutionary search and multilevel optimisation approach to graph-partitioning. J. Glob. Optim. 2004, 29, 225–241. [Google Scholar] [CrossRef]
- Schloegel, K.; Karypis, G.; Kumar, V. A new algorithm for multi-objective graph partitioning. Lect. Notes Comput. Sci. 1999, 1685, 322–331. [Google Scholar]
- Selvakkumaran, N.; Karypis, G. Multi-objective hypergraph partitioning algorithms for cut and maximum subdomain degree minimization. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 2003, 25, 504–517. [Google Scholar] [CrossRef]
- Karypis, G.; Kumar, V. Hmetis 1.5: A Hypergraph Partitioning Package; Technical Report; Department of Computer Science, University of Minnesota: Minneapolis, MN, USA, 1998. [Google Scholar]
- Galvão, L.C.; Novaes, A.G.; De Cursi, J.S.; Souza, J.C. A multiplicatively-weighted Voronoi diagram approach to logistics districting. Comput. Oper. Res. 2006, 33, 93–114. [Google Scholar] [CrossRef]
- Jia, Y.; Lai, C.S.; Xu, Z.; Chai, S.; Wong, K.P. Adaptive partitioning approach to self-sustained smart grid. IET Gener. Transm. Distrib. 2017, 11, 485–494. [Google Scholar] [CrossRef]
- Bergey, P.K.; Ragsdale, C.T.; Hoskote, M. A decision support system for the electrical power districting problem. Decis. Support Syst. 2003, 36, 1–17. [Google Scholar] [CrossRef]
- Farshbaf, M.; Feizi-Derakhshi, M.R. Multi-objective optimization of graph partitioning using genetic algorithms. In Proceedings of the Advanced Engineering Computing and Applications in Sciences, Sliema, Malta, 11–16 October 2009; pp. 1–6. [Google Scholar]
- Steiner, M.T.A.; Datta, D.; Neto, P.J.S.; Scarpin, C.T.; Figueira, J.R. Multi-objective optimization in partitioning the healthcare system of Parana State in Brazil. Omega 2015, 52, 53–64. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T.A.M.T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evolut. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Khayyat, Z.; Awara, K.; Alonazi, A.; Jamjoom, H.; Williams, D.; Kalnis, P. Mizan: A system for dynamic load balancing in large-scale graph processing. In Proceedings of the 8th ACM European Conference on Computer Systems, Prague, Czech Republic, 15–17 April 2013; pp. 169–182. [Google Scholar]
- Vaquero, L.; Cuadrado, F.; Logothetis, D.; Martella, C. xDGP: A dynamic graph processing system with adaptive partitioning. Available online: https://arxiv.org/abs/1309.1049 (accessed on 20 September 2017).
- Yang, D.; Zhang, D.; Tan, K.L.; Cao, J.; Le Mouël, F. CANDS: Continuous optimal navigation via distributed stream processing. Proc. VLDB Endow. 2014, 8, 137–148. [Google Scholar] [CrossRef]
- Bao, N.T.; Suzumura, T. Towards highly scalable pregel-based graph processing platform with x10. In Proceedings of the 22nd International Conference on World Wide Web, Rio de Janeiro, Brazil, 13–17 May 2013; pp. 501–508. [Google Scholar]
- Vaquero, L.M.; Cuadrado, F.; Logothetis, D.; Martella, C. Adaptive partitioning for large-scale dynamic graphs. In Proceedings of the 2014 IEEE 34th International Conference on Distributed Computing Systems (ICDCS), Madrid, Spain, 30 June–3 July 2014; pp. 144–153. [Google Scholar]
- Sun, L.; Zhang, C.; Lin, Z.; Wen, F.; Xue, Y.; Salam, M.A.; Ang, S.P. Network partitioning strategy for parallel power system restoration. IET Gener. Transm. Distrib. 2016, 10, 1883–1892. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description of Parameter |
|---|---|
| Number otyphoons | |
| The buoy belongs to the th region, | |
| The buoy . does not belongs to the th region, | |
| The th typhoon is related to buoys in the region , | |
| The th typhoon is not related to buoys in the region , | |
| Buoy and buoy are connected to each other. | |
| Buoy and buoy are not connected to each other. |
| Description of Constraint | Constraint |
|---|---|
| Number of regions | |
| Size of region | |
| Disjoint regions | |
| Non-empty region | |
| Including all buoys | |
| Integrity of Buoy |
| No. | Start Date | End Date | Data 1 | … | Data k (k Is Variable) | ||
|---|---|---|---|---|---|---|---|
| 200,001 | 5 May 2000 08:00 | 12 May 2000 20:00 | Longitude, Latitude | 135, 9.9 | … | Longitude, Latitude | 149.5, 28.4 |
| Wind Speed (m/s) | 15 | Wind Speed (m/s) | 15 | ||||
| … | … | … | … | ||||
| Pressure (dbar) | 1004 | Pressure (dbar) | 998 | ||||
| Wind-force (Category) | 7 | Wind-force (Category) | 7 | ||||
| … | … | … | … | … | … | … | |
| 201,703 | 2 July 2017 08:00 | 4 July 2017 17:00 | Longitude, Latitude | 126.8, 20.3 | … | Longitude, Latitude | 136.3, 34.2 |
| Wind Speed (m/s) | 18 | Wind Speed (m/s) | 23 | ||||
| … | … | … | … | ||||
| Pressure (dbar) | 1000 | Pressure (dbar) | 992 | ||||
| Wind-force (Category) | 8 | Wind-force (Category) | 9 | ||||
| The Population Size | The Number of Regions | (%) | Running Time (ms) |
|---|---|---|---|
| 20 | 4 | 71.00 | 4067.528 |
| 5 | 64.69 | 3744.439 | |
| 6 | 59.17 | 3117.520 | |
| 7 | 50.49 | 3093.2761 | |
| 8 | 47.14 | 2503.271 | |
| 50 | 4 | 71.99 | 8731.366 |
| 5 | 66.46 | 8486. 331 | |
| 6 | 61.53 | 8392.4750 | |
| 7 | 56.01 | 8212.1418 | |
| 8 | 50.88 | 7645.235 | |
| 100 | 4 | 73.17 | 24,479.152 |
| 5 | 66.66 | 23,549.383 | |
| 6 | 59.56 | 21,753.301 | |
| 7 | 57.00 | 20,001.864 | |
| 8 | 55.02 | 1655.209 |
| Objective Function | (%) | (ms) |
|---|---|---|
| SOGA with the maximum value of θ | 76.13 | 153.34 |
| SOGA with the minimum value of f2 | 57.59 | 121.21 |
| NSGA solution | 61.93 | 150.55 |
| NSGA-II Optimal solution | 73.57 | 144.31 |
| Improvement | 11.64% | 4.14% |
| The Number of Typhoons | (%) | (ms) |
|---|---|---|
| 140 | 70.19 | 107.89 |
| 145 | 72.62 | 110.19 |
| 150 | 72.85 | 112.72 |
| 155 | 72.14 | 114.34 |
| 160 | 72.59 | 125.21 |
| 165 | 72.16 | 143.15 |
| 170 | 73.57 | 144.31 |
| The Number of Typhoons | (%) |
|---|---|
| 140 | 61.11 |
| 145 | 59.72 |
| 150 | 59.72 |
| 155 | 61.11 |
| 160 | 58.94 |
| 165 | 60.27 |
| 170 | 59.72 |
| Region ID | Number of Buoys | Buoy ID |
|---|---|---|
| 1 | 15 | “0124”, “0129”, “0143”, “0156”, “0259”, “0294”, “0146”, “0241”, “0086”, “0228”, “0158”, “0331”, “0332”, “0333”, “0338” |
| 2 | 15 | “0094”, “0144”, “0222”, “0233”, “0286”, “0149”, “0160”, “0290”, “0229”, “0225”, “0231”, “0234”, “0220”, “0224”, “0199” |
| 3 | 12 | “0187”, “0188”, “0221”, “0262”, “0264”, “0182”, “0151”, “0148”, “0184”, “0185”, “0072”, “0205” |
| 4 | 11 | “0196”, “0195”, “0194”, “0335”, “0181”, “0364”, “0365”, “0366”, “0367”, “0368”, “0359” |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, D.; Xu, C.; Zhao, D.; Song, W.; He, Q. A Multi-Objective Partition Method for Marine Sensor Networks Based on Degree of Event Correlation. Sensors 2017, 17, 2168. https://doi.org/10.3390/s17102168
Huang D, Xu C, Zhao D, Song W, He Q. A Multi-Objective Partition Method for Marine Sensor Networks Based on Degree of Event Correlation. Sensors. 2017; 17(10):2168. https://doi.org/10.3390/s17102168
Chicago/Turabian StyleHuang, Dongmei, Chenyixuan Xu, Danfeng Zhao, Wei Song, and Qi He. 2017. "A Multi-Objective Partition Method for Marine Sensor Networks Based on Degree of Event Correlation" Sensors 17, no. 10: 2168. https://doi.org/10.3390/s17102168
APA StyleHuang, D., Xu, C., Zhao, D., Song, W., & He, Q. (2017). A Multi-Objective Partition Method for Marine Sensor Networks Based on Degree of Event Correlation. Sensors, 17(10), 2168. https://doi.org/10.3390/s17102168