Towards the Automatic Detection of Pre-Existing Termite Mounds through UAS and Hyperspectral Imagery


Abstract
:1. Introduction
2. Methods and Materials
2.1. Site
2.2. Image Sensors
2.3. UAV and Sample Acquisition
2.4. Software
2.5. Algorithm
| Algorithm 1 Detection of pre-exiting termite mounds with hyperspectral imaging. | |
| Input: raw hyperspectral image file | |
| Pre-processing | |
| 1. | Calculate hyper-cube radiance |
| 2. | Perform Orthorectification process |
| 3. | Load GPS coordinates from register file, and obtain a ROI |
| 4. | Apply closing operator once ▷ structuring element: 3 × 3 rectangle |
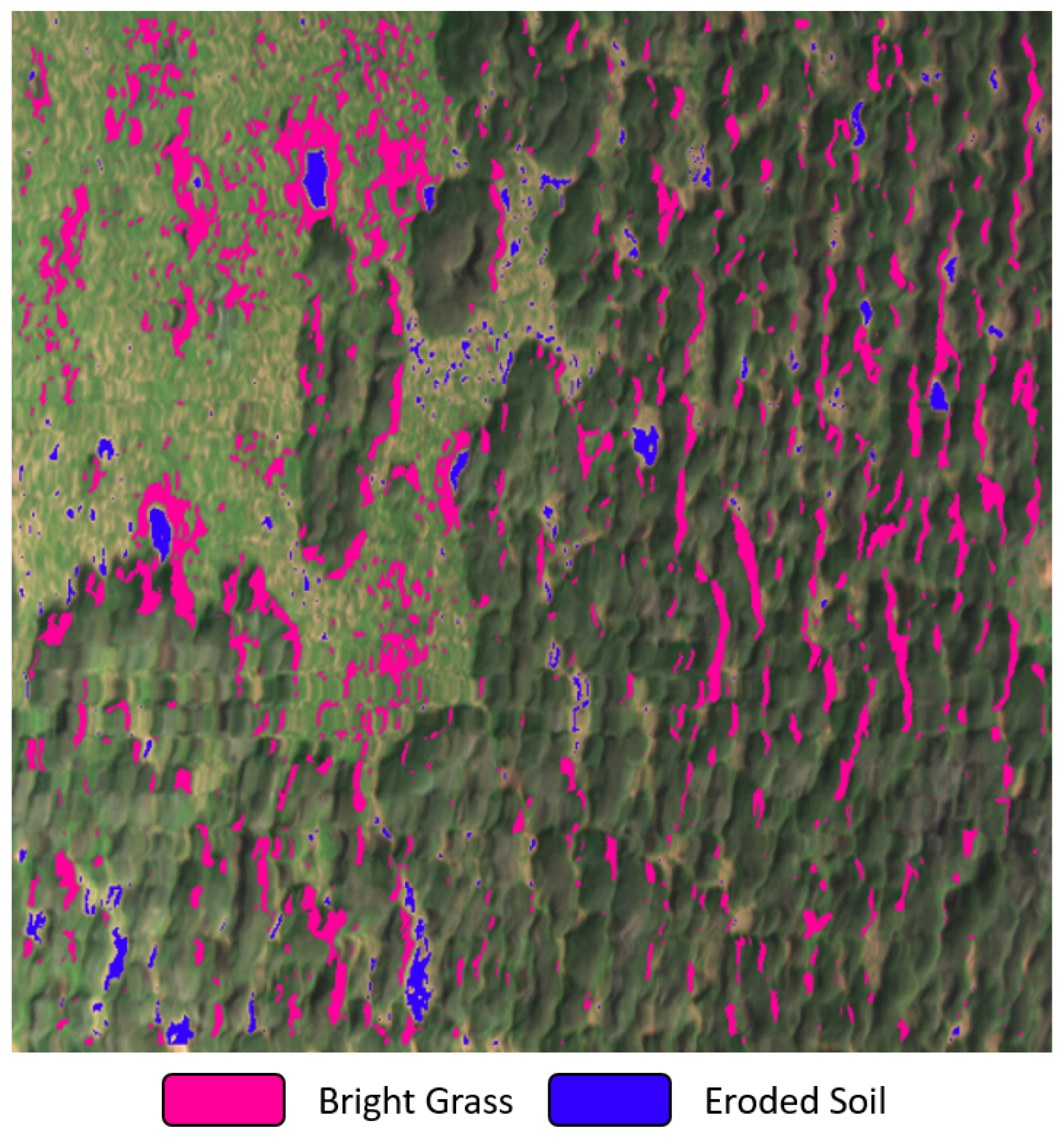
| Material Classification | |
| 5. | Load illuminant spectrum from white reference |
| 6. | Calculate reflectance |
| 7. | Load material reflectance library |
| 8. | Run SVM classifier |
| 9. | Filter segmented material layers: “Eroded Soil” and “Light Grass” |
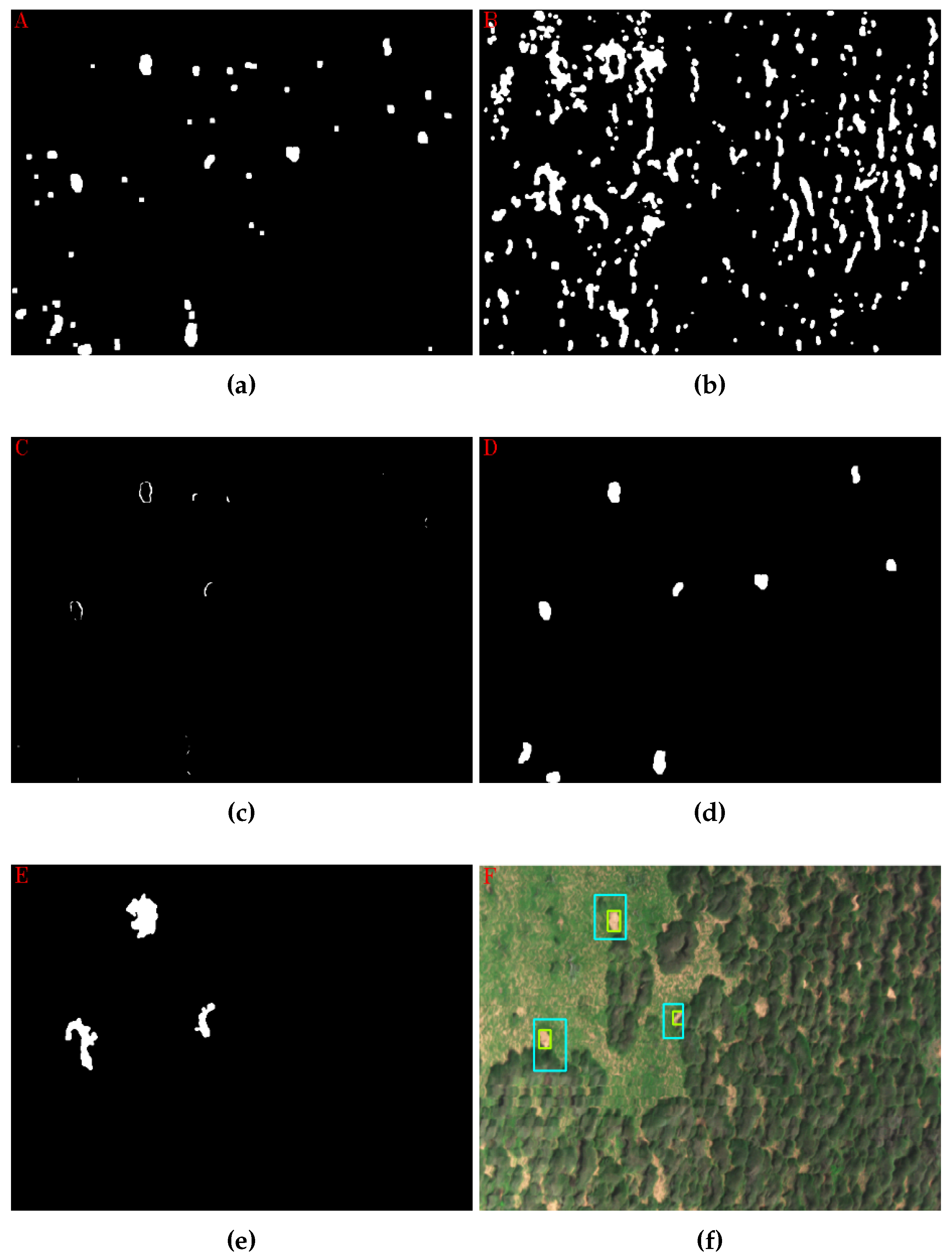
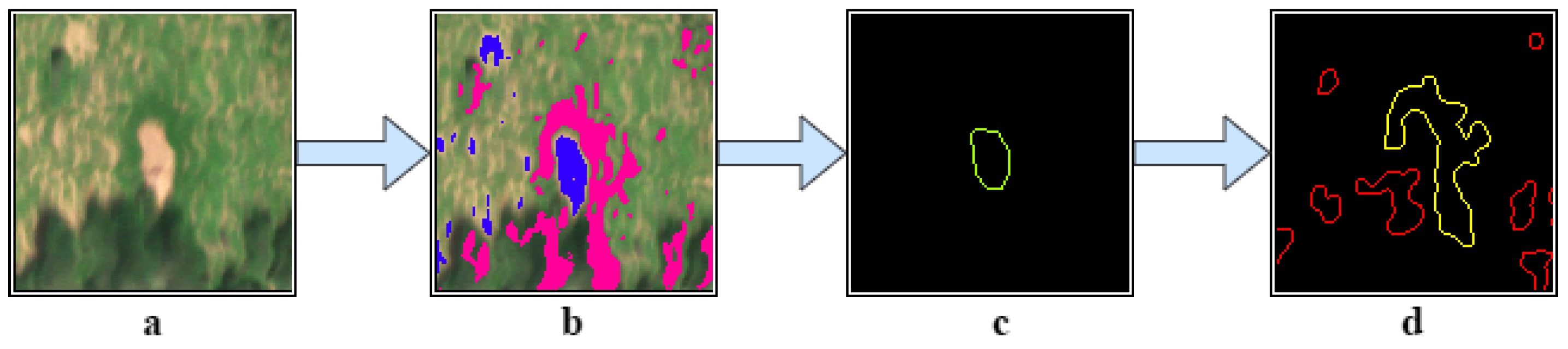
| Object Detection | |
| 10. | Apply Smooth-Median Filter on soil layer ▷ kernel size: 3 |
| 11. | Apply closing operator on soil layer once ▷ structuring element: 3 × 3 rectangle |
| 12. | Create a temporal Image |
| 13. | double dilation operator on soil layer ▷ structuring element: 3 × 3 ellipse |
| 14. | Apply Smooth-Median Filter on grass layer ▷ kernel size: 3 |
| 15. | Create a temporal Image |
| 16. | AND operator between grass layer and |
| 17. | if Mean() then return null |
| 18. | end if |
| 19. | Find contours from the soil layer |
| 20. | for do ▷ number of detected soil contours |
| 21. | Select ▷ soil contour at i index |
| 22. | Run method ▷ output: |
| 23. | perimeter of SC(i) |
| 24. | if then |
| 25. | Discard |
| 26. | else |
| 27. | Find contours from the grass layer |
| 28. | for do ▷ number of detected grass contours |
| 29. | Select ▷ grass contour at j index |
| 30. | perimeter of |
| 31. | distance between and centroids |
| 32. | radius of |
| 33. | |
| 34. | if ( || ) then |
| 35. | Minimum intersection line distance between and |
| 36. | if then |
| 37. | Draw contours at ROI image |
| 38. | end if |
| 39. | end if |
| 40. | end for |
| 41. | end if |
| 42. | end for |
| 43. | return ROI Image |
2.5.1. Pre-Processing
2.5.2. Material Classification
2.5.3. Object Detection
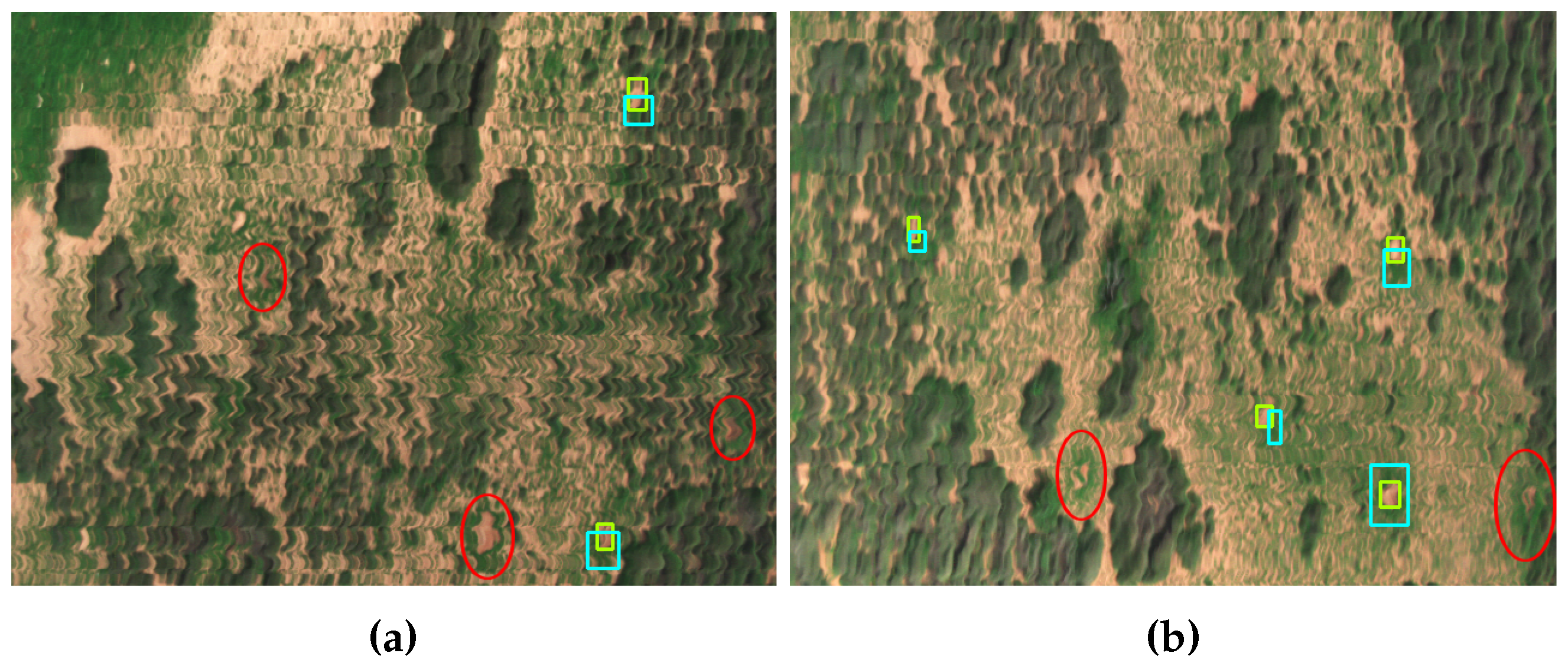
3. Results
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lee, K.E.; Wood, T.G. Termites and Soils; Academic Press: London, UK, 1971; p. 251. [Google Scholar]
- Dawes-Gromadzki, T.Z. Abundance and diversity of termites in a savannah woodland reserve in tropical Australia. Aust. J. Entomol. 2008, 47, 307–314. [Google Scholar] [CrossRef]
- Dawes, T.Z. Impacts of habitat disturbance on termites and soil water storage in a tropical Australian savannah. Pedobiologia 2010, 53, 241–246. [Google Scholar] [CrossRef]
- Holt, J.A. Carbon mineralization in semi-arid northeastern Australia: The role of termites. J. Trop. Ecol. 1987, 3, 255. [Google Scholar] [CrossRef]
- Jamali, H.; Livesley, S.J.; Grover, S.P.; Dawes, T.Z.; Hutley, L.B.; Cook, G.D.; Arndt, S.K. The Importance of Termites to the CH4 Balance of a Tropical Savanna Woodland of Northern Australia. Ecosystems 2011, 14, 698–709. [Google Scholar] [CrossRef]
- Lobry De Bruyn, L.A.; Conacher, A.J. Soil modification by termites in the central wheatbelt of Western Australia. Aust. J. Soil Res. 1995, 33, 179–193. [Google Scholar]
- Gosling, C.M.; Cromsigt, J.P.; Mpanza, N.; Olff, H. Effects of Erosion from Mounds of Different Termite Genera on Distinct Functional Grassland Types in an African Savannah. Ecosystems 2012, 15, 128–139. [Google Scholar] [CrossRef] [PubMed]
- Foti, F.L. The Possible Nutritional/Medicinal Value of Some Termite Mounds Used by Aboriginal Communities of Nauiyu Nambiyu (Daly River) and Elliott of the Northern Territory, with an Emphasis on Mineral Elements. Ph.D. Thesis, Charles Darwin University, Casuarina, Australia, 1994. [Google Scholar]
- Milner, R.J.; Staples, J.A. Biological control of termites: Results and experiences within a CSIRO project in Australia. Biocontrol Sci. Technol. 1996, 6, 3–9. [Google Scholar]
- Chouvenc, T.; Su, N.Y.; Kenneth Grace, J. Fifty years of attempted biological control of termites—Analysis of a failure. Biol. Control 2011, 59, 69–82. [Google Scholar] [CrossRef]
- Bunting, P.; He, W.; Zwiggelaar, R.; Lucas, R. Combining Texture and Hyperspectral Information for the Classification of Tree Species in Australian Savanna Woodlands. In Innovations in Remote Sensing and Photogrammetry; Jones, S., Reinke, K., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 19–26. [Google Scholar]
- He, K.S.; Rocchini, D.; Neteler, M.; Nagendra, H. Benefits of hyperspectral remote sensing for tracking plant invasions. Divers. Distrib. 2011, 17, 381–392. [Google Scholar] [CrossRef]
- Wallis, C.I.; Brehm, G.; Donoso, D.A.; Fiedler, K.; Homeier, J.; Paulsch, D.; Süßenbach, D.; Tiede, Y.; Brandl, R.; Farwig, N.; et al. Remote sensing improves prediction of tropical montane species diversity but performance differs among taxa. Ecol. Indic. 2017. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Zeng, C.; King, D.J.; Richardson, M.; Shan, B. Fusion of Multispectral Imagery and Spectrometer Data in UAV Remote Sensing. Remote Sens. 2017, 9, 696. [Google Scholar] [CrossRef]
- Mahlein, A.K.; Rumpf, T.; Welke, P.; Dehne, H.W.; Plümer, L.; Steiner, U.; Oerke, E.C. Development of spectral indices for detecting and identifying plant diseases. Remote Sens. Environ. 2013, 128, 21–30. [Google Scholar] [CrossRef]
- Lee, D.S.; Gonzalez, L.F.; Périaux, J.; Srinivas, K. Evolutionary optimisation methods with uncertainty for modern multidisciplinary design in aeronautical engineering. In Notes on Numerical Fluid Mechanics and Multidisciplinary Design; Springer: Berlin, Germany, 2009; Volume 100, pp. 271–284. [Google Scholar]
- Lee, D.S.; Gonzalez, L.F.; Whitney, E.J. Multi-objective Multidisciplinary Multi-fidelity Design Tool: HAPMOEA-User Guide; Technical report; The University of Sydney (USYD)/Queensland University of Technology (QUT): Brisbane City, Australia, 2007. [Google Scholar]
- González, L.; Whitney, E.; Srinivas, K.; Périaux, J. Optimum Multidisciplinary and Multi-Objective Wing Design in CFD Using Evolutionary Techniques. In Proceedings of the Computational Fluid Dynamics 2004: Third International Conference on Computational Fluid Dynamics, ICCFD3, Toronto, ON, Canada, 12–16 July 2004. [Google Scholar]
- Alvarado, M.; Gonzalez, F.; Fletcher, A.; Doshi, A. Towards the Development of a Low Cost Airborne Sensing System to Monitor Dust Particles after Blasting at Open-Pit Mine Sites. Sensors 2015, 15, 19667–19687. [Google Scholar] [Green Version]
- Vogt, J.T. Detection of Imported Fire Ant (Hymenoptera: Formicidae) Mounds with Satellite Imagery. Environ. Entomol. 2004, 33, 1718–1721. [Google Scholar] [CrossRef]
- Vogt, J.T.; Wallet, B. Feasibility of using template-based and object-based automated detection methods for quantifying black and hybrid imported fire ant (Solenopsis invicta and S. invicta x richery) mounds in aerial digital imagery. Rangel. J. 2008, 30, 291–295. [Google Scholar] [CrossRef]
- Bureau of Meteorology. Learmonth, WA—July 2016—Daily Weather Observations; Bureau of Meteorology: West Perth, WA, Australia, 2016.
- Habili, N.; Oorloff, J. Scyllarus: From Research to Commercial Software. In Proceedings of the 24th Australasian Software Engineering Conference, Adelaide, Australia, 28 September–1 October 2015; Volume 2, pp. 1–4. [Google Scholar]
- Bradski, G. The OpenCV library. Dr. Dobb’s J. Softw. Tools 2000, 25, 120–123. [Google Scholar]
- Robles-Kelly, A.; Huynh, C.P. Illumination Spectrum Recovery. U.S. Patent 8,953,906, 10 February 2011. [Google Scholar]
- Rose, K. Deterministic Annealing for Clustering, Compression, Classification, Regression, and Related Optimization Problems. Proc. IEEE 1998, 86, 2210–2239. [Google Scholar] [CrossRef]
- Suzuki, S.; Abe, K. Topological structural analysis of digitized binary images by border following. Comput. Vis. Graph. Image Process. 1985, 30, 32–46. [Google Scholar] [CrossRef]
- Hu, M.K. Visual pattern recognition by moment invariants. IRE Trans. Inf. Theory 1962, 8, 179–187. [Google Scholar]
- Bandyopadhyay, S.; Maulik, U.; Mukhopadhyay, A. Multiobjective Genetic Clustering for Pixel Classification in Remote Sensing Imagery. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1506–1511. [Google Scholar] [CrossRef]
- De la Fraga, L.G.; Coello, C.A. A Review of Applications of Evolutionary Algorithms in Pattern Recognition. In Pattern Recognition, Machine Intelligence and Biometrics; Wang, P.S.P., Ed.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 3–28. [Google Scholar]
- Ma, A.; Zhong, Y.; Zhang, L. Adaptive Multiobjective Memetic Fuzzy Clustering Algorithm for Remote Sensing Imagery. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4202–4217. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ROI | Termite Mounds | True Positives | False Negatives | False Positives | Accuracy (%) |
|---|---|---|---|---|---|
| 1 | 6 | 5 | 1 | 0 | 83.3 |
| 2 | 9 | 4 | 5 | 1 | 40.0 |
| 3 | 1 | 1 | 0 | 0 | 100.0 |
| 4 | 2 | 1 | 1 | 0 | 50.0 |
| 5 | 13 | 11 | 2 | 3 | 68.8 |
| 6 | 2 | 2 | 0 | 0 | 100.0 |
| 7 | 9 | 7 | 2 | 0 | 77.8 |
| 8 | 2 | 2 | 0 | 0 | 100.0 |
| 9 | 3 | 3 | 0 | 1 | 75.0 |
| 10 | 2 | 2 | 0 | 0 | 100.0 |
| 11 | 4 | 3 | 1 | 0 | 75.0 |
| 12 | 2 | 1 | 1 | 0 | 50.0 |
| 13 | 7 | 4 | 3 | 1 | 50.0 |
| 14 | 1 | 1 | 0 | 0 | 100.0 |
| 15 | 6 | 4 | 2 | 0 | 66.7 |
| 16 | 6 | 5 | 1 | 0 | 83.3 |
| 17 | 7 | 5 | 2 | 0 | 71.4 |
| 18 | 6 | 3 | 3 | 0 | 50.0 |
| 19 | 1 | 1 | 0 | 0 | 100.0 |
| 20 | 7 | 4 | 3 | 1 | 50.0 |
| 21 | 4 | 3 | 1 | 1 | 60.0 |
| 22 | 7 | 5 | 2 | 1 | 62.5 |
| 23 | 3 | 3 | 0 | 0 | 100.0 |
| 24 | 8 | 6 | 2 | 0 | 75.0 |
| 25 | 1 | 1 | 0 | 0 | 100.0 |
| Total | 119 | 87 | 32 | 9 | 68.0% |
| Proportion | 100% | 73.1% | 26.9% | 7.6% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sandino, J.; Wooler, A.; Gonzalez, F. Towards the Automatic Detection of Pre-Existing Termite Mounds through UAS and Hyperspectral Imagery. Sensors 2017, 17, 2196. https://doi.org/10.3390/s17102196
Sandino J, Wooler A, Gonzalez F. Towards the Automatic Detection of Pre-Existing Termite Mounds through UAS and Hyperspectral Imagery. Sensors. 2017; 17(10):2196. https://doi.org/10.3390/s17102196
Chicago/Turabian StyleSandino, Juan, Adam Wooler, and Felipe Gonzalez. 2017. "Towards the Automatic Detection of Pre-Existing Termite Mounds through UAS and Hyperspectral Imagery" Sensors 17, no. 10: 2196. https://doi.org/10.3390/s17102196
APA StyleSandino, J., Wooler, A., & Gonzalez, F. (2017). Towards the Automatic Detection of Pre-Existing Termite Mounds through UAS and Hyperspectral Imagery. Sensors, 17(10), 2196. https://doi.org/10.3390/s17102196