Review and Analysis of Peak Tracking Techniques for Fiber Bragg Grating Sensors


Abstract
:1. Introduction
2. FBG Sensors and Interrogation
2.1. FBG Sensors Theory
2.2. FBG Interrogation Systems
3. Review of Peak Tracking Methods
3.1. Direct Methods
3.1.1. Maximum
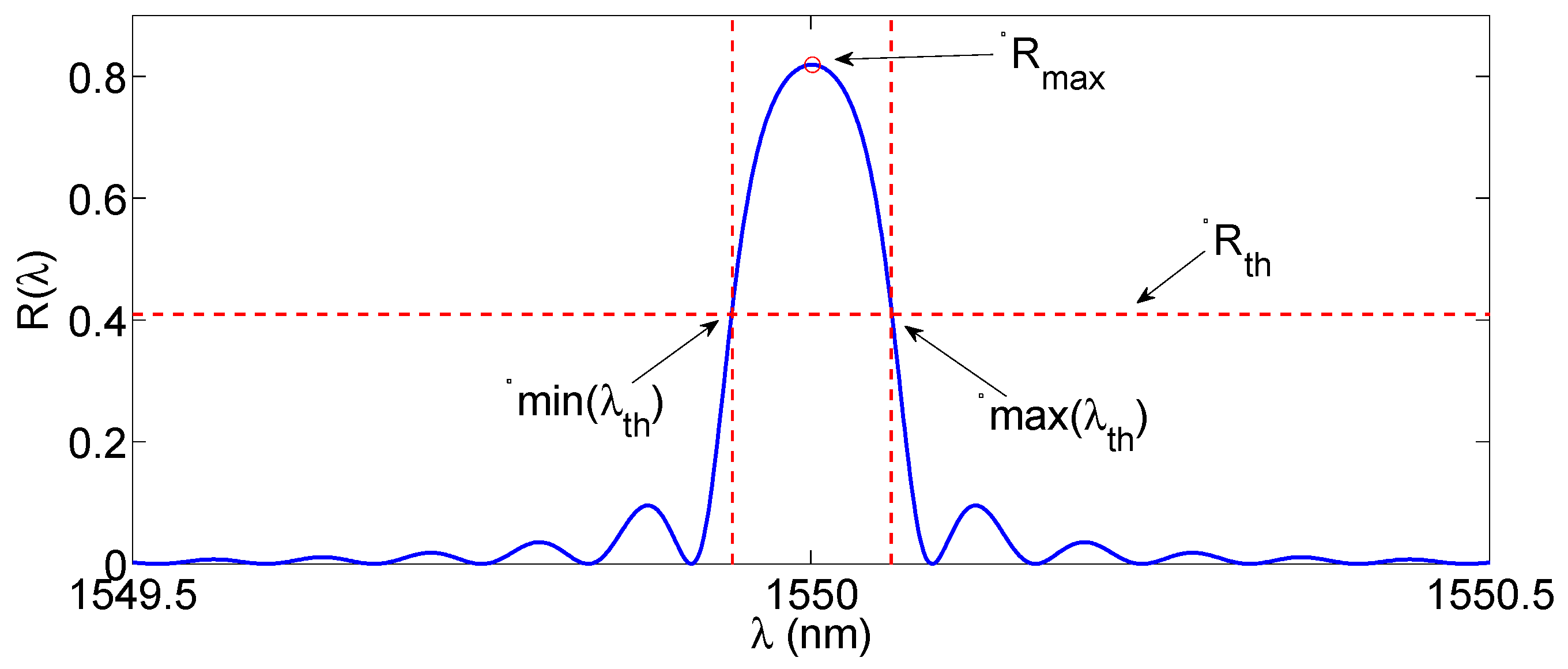
3.1.2. X-dB Bandwidth (X-BW)
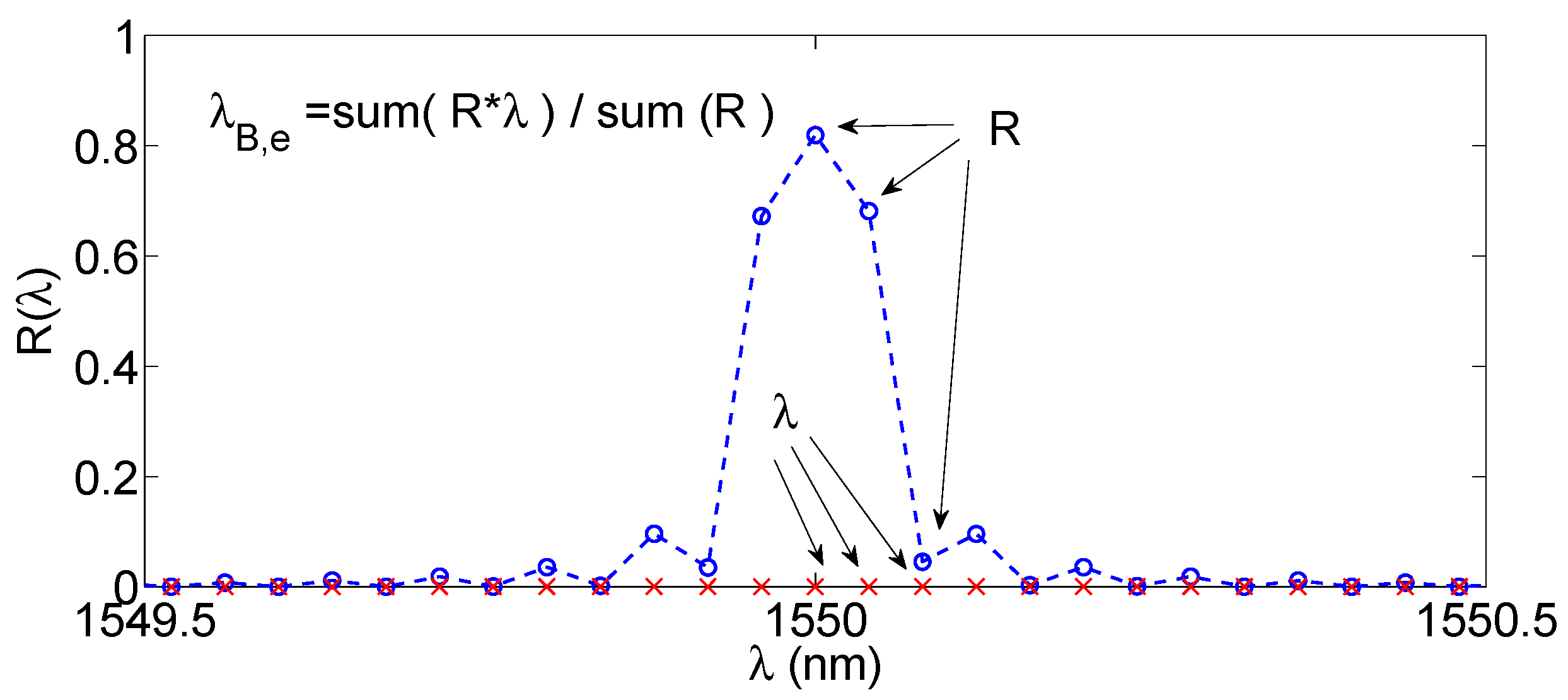
3.1.3. Centroid
3.2. Curve Fitting Methods
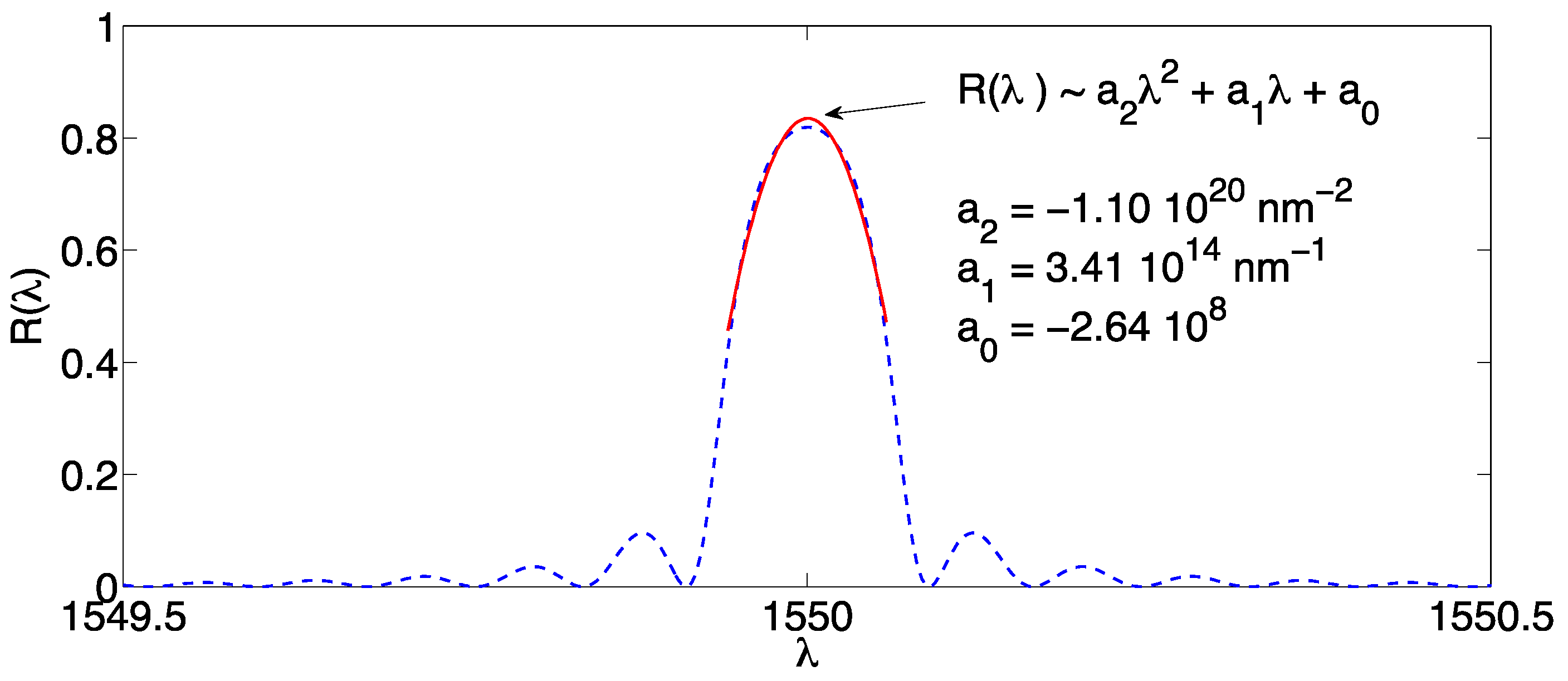
3.2.1. 2nd Order Polynomial
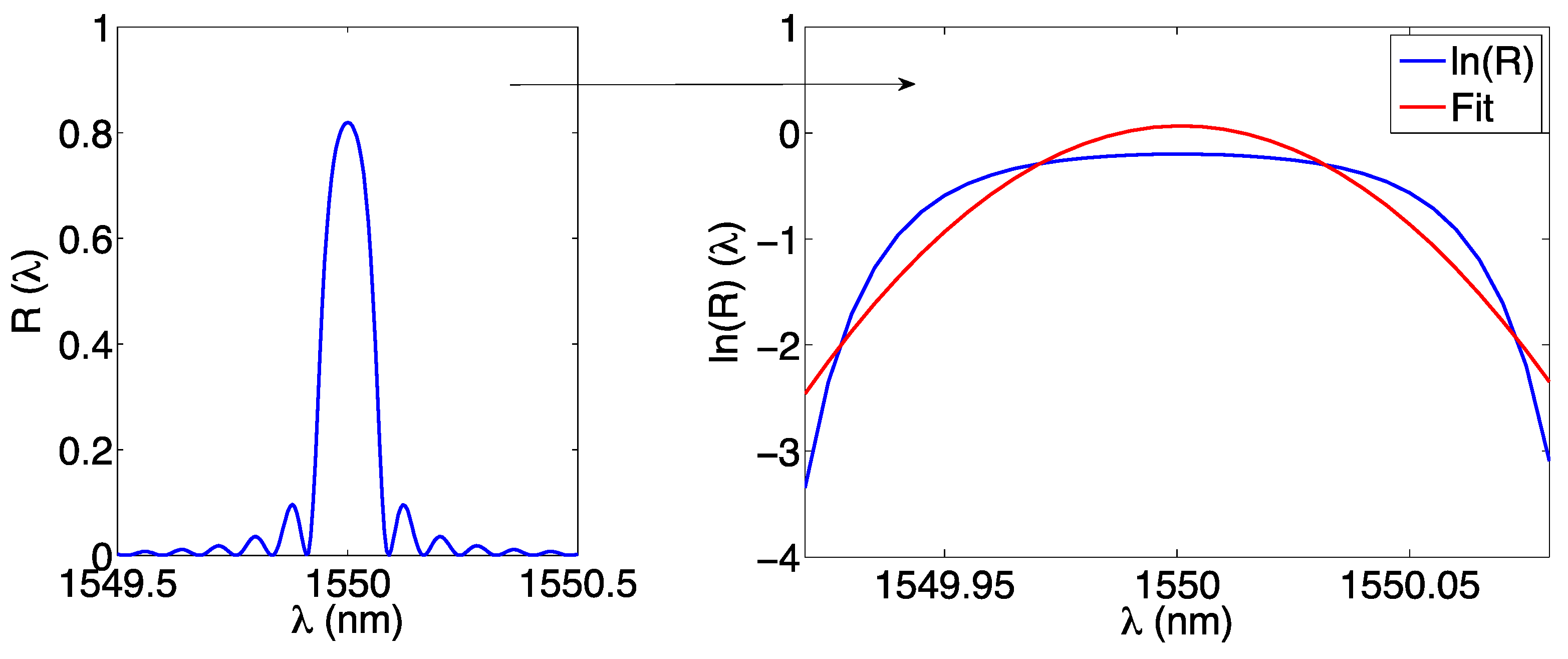
3.2.2. Gaussian Polynomial Fit
3.2.3. Gaussian Fit
3.2.4. Higher-Order Polynomial Fitting
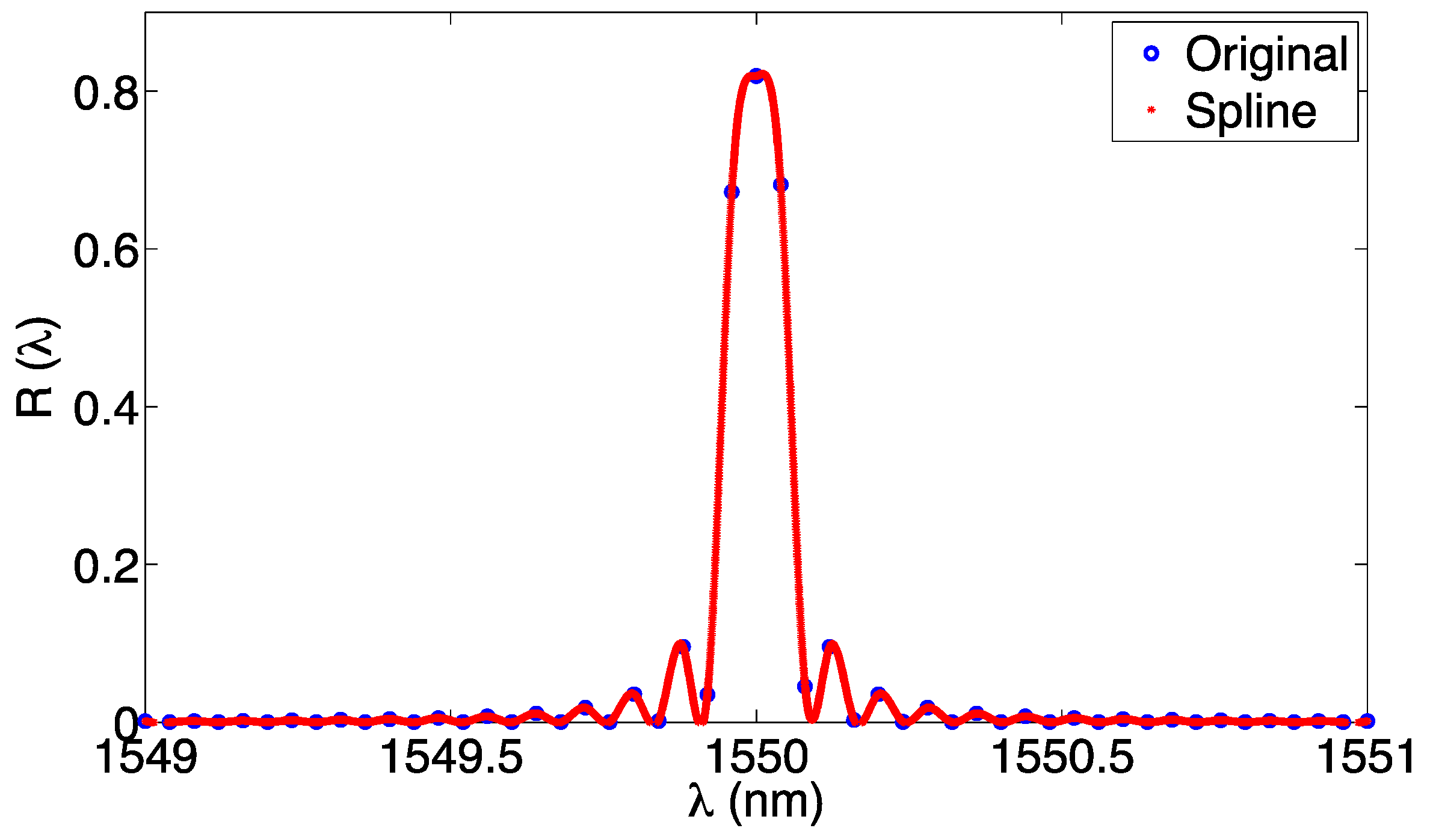
3.2.5. Spline
3.3. Correlation-Based Methods
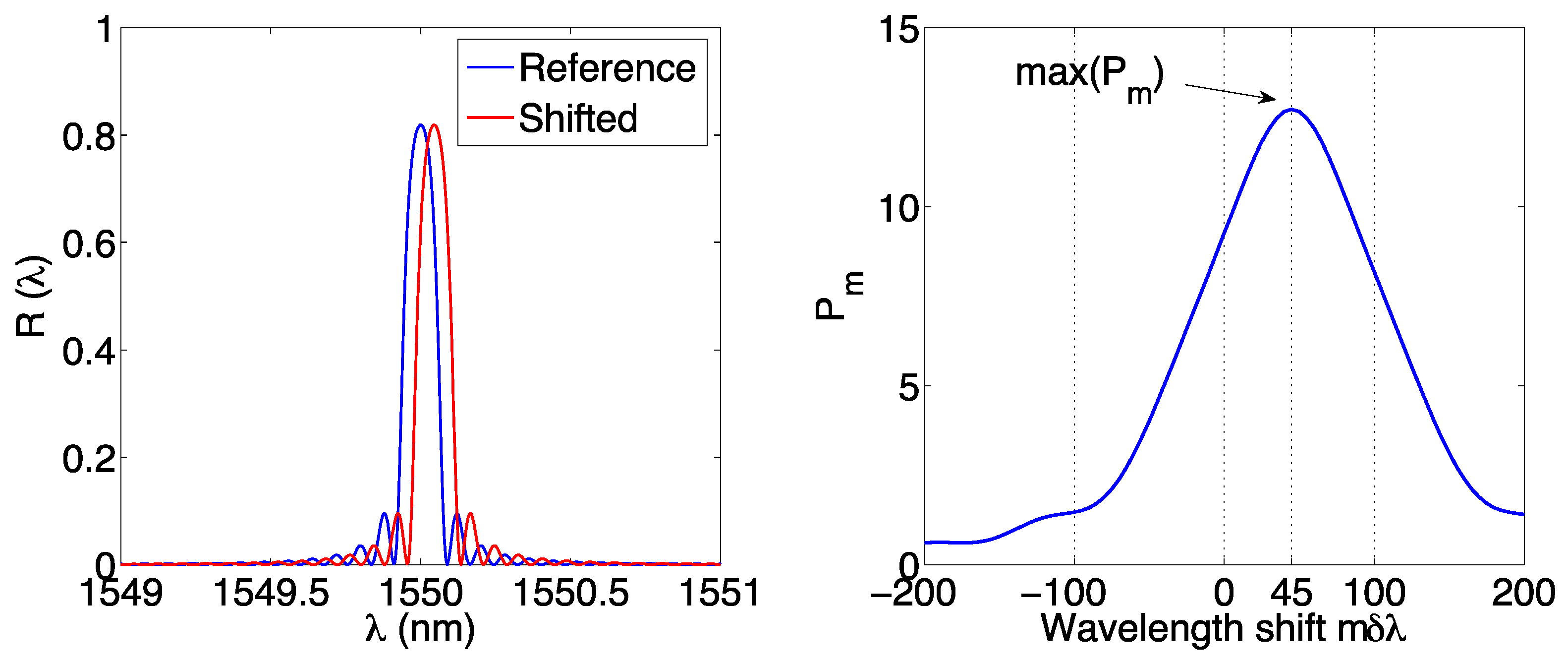
3.3.1. Wavelength-Shifted Mutual Correlation
3.3.2. Cross-Correlation
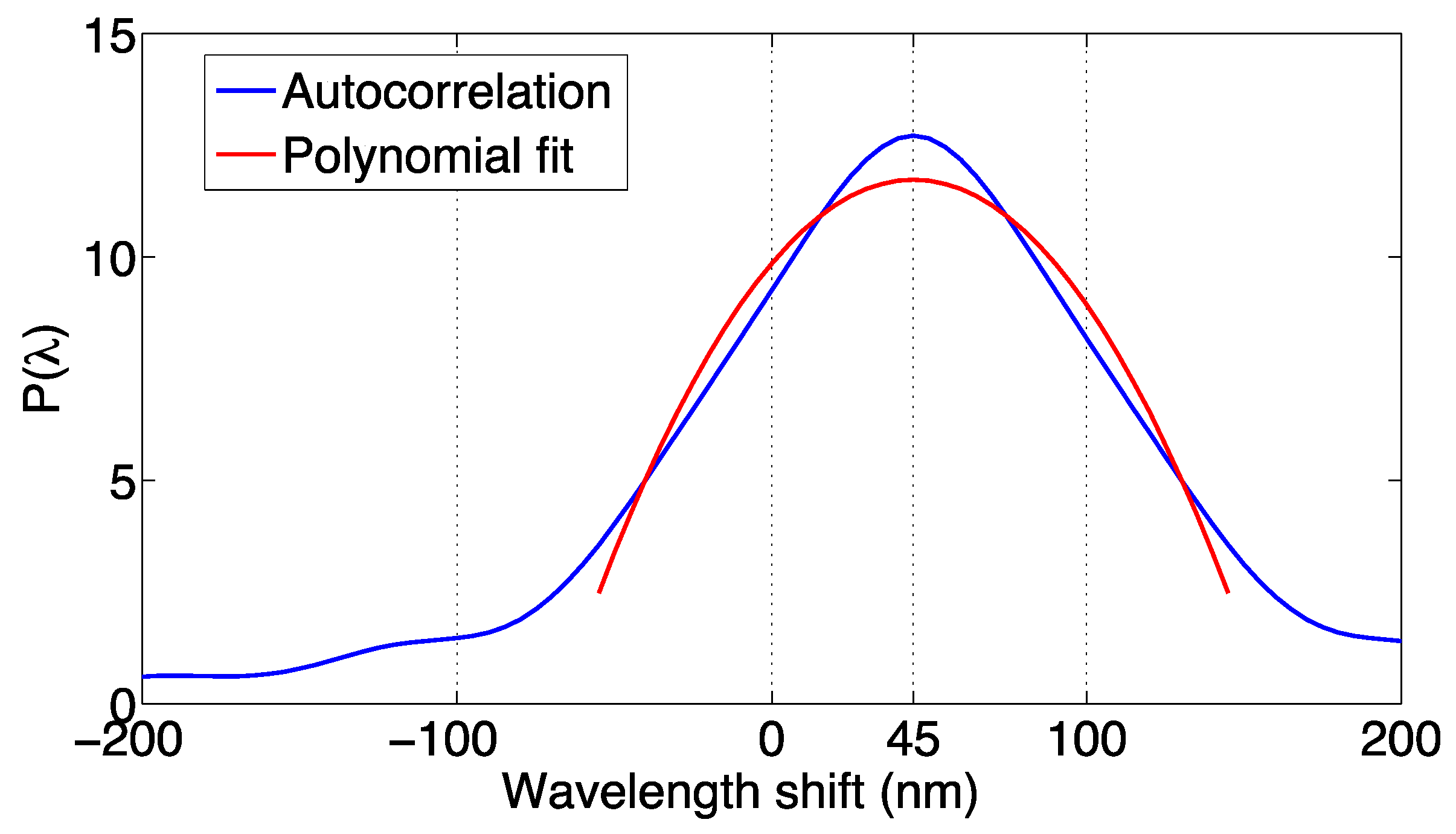
3.3.3. Correlation Polynomial Fit
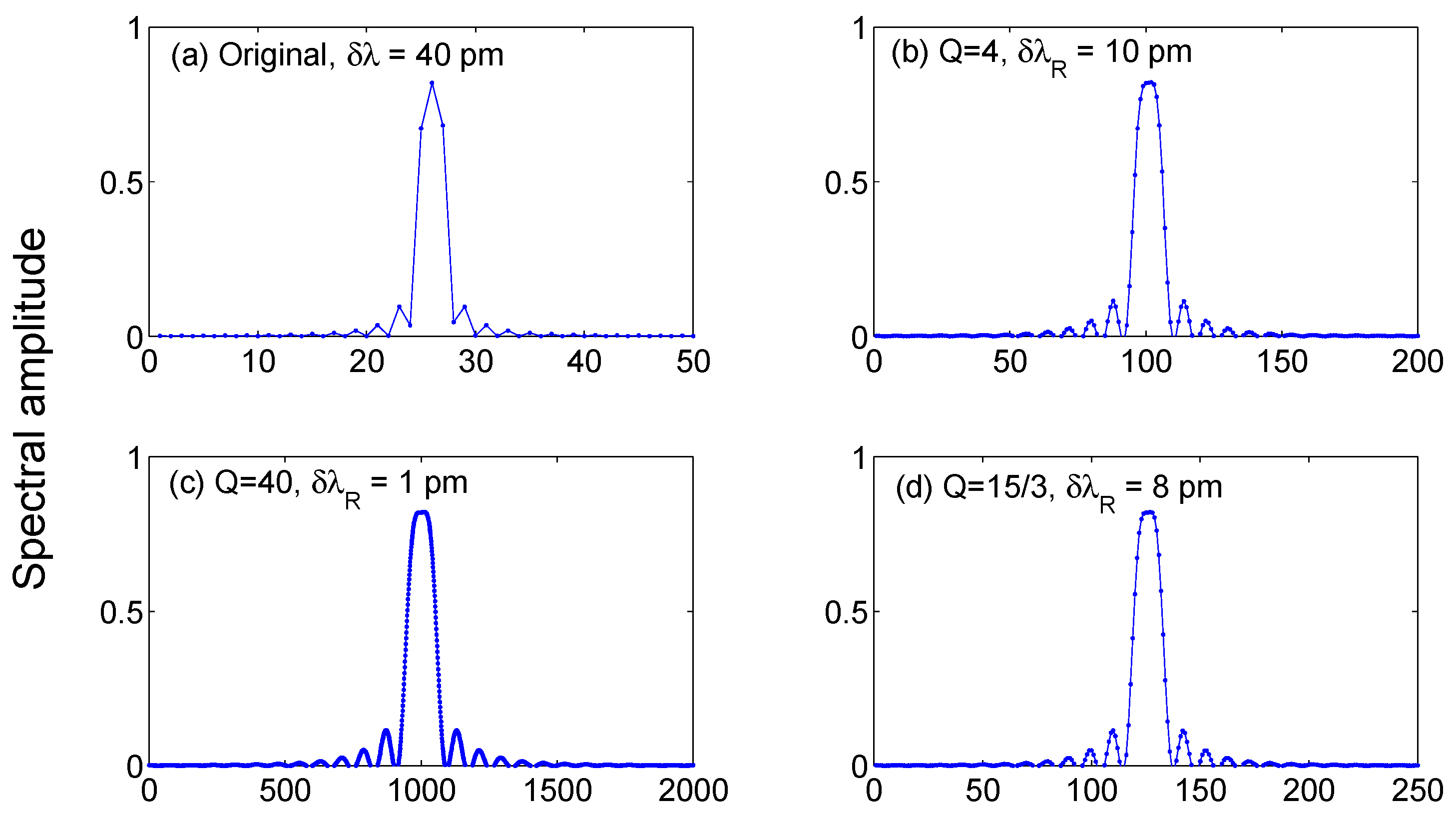
3.4. Oversampling
3.4.1. Upsampling
3.4.2. Resampling
3.5. Transform-Based Methods
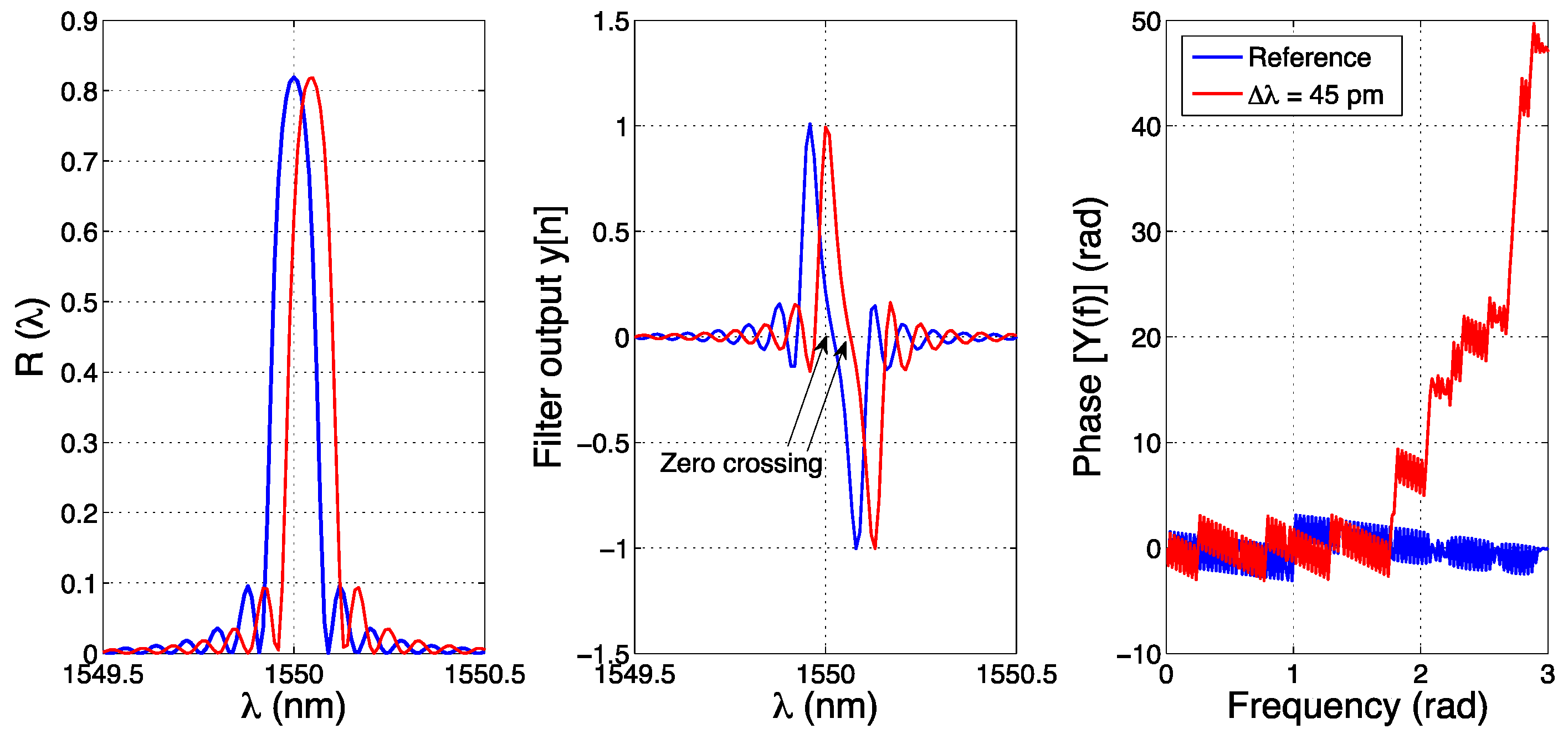
3.5.1. Fast Phase Correlation (FPC)
3.5.2. Linear Phase Operator (LPO)
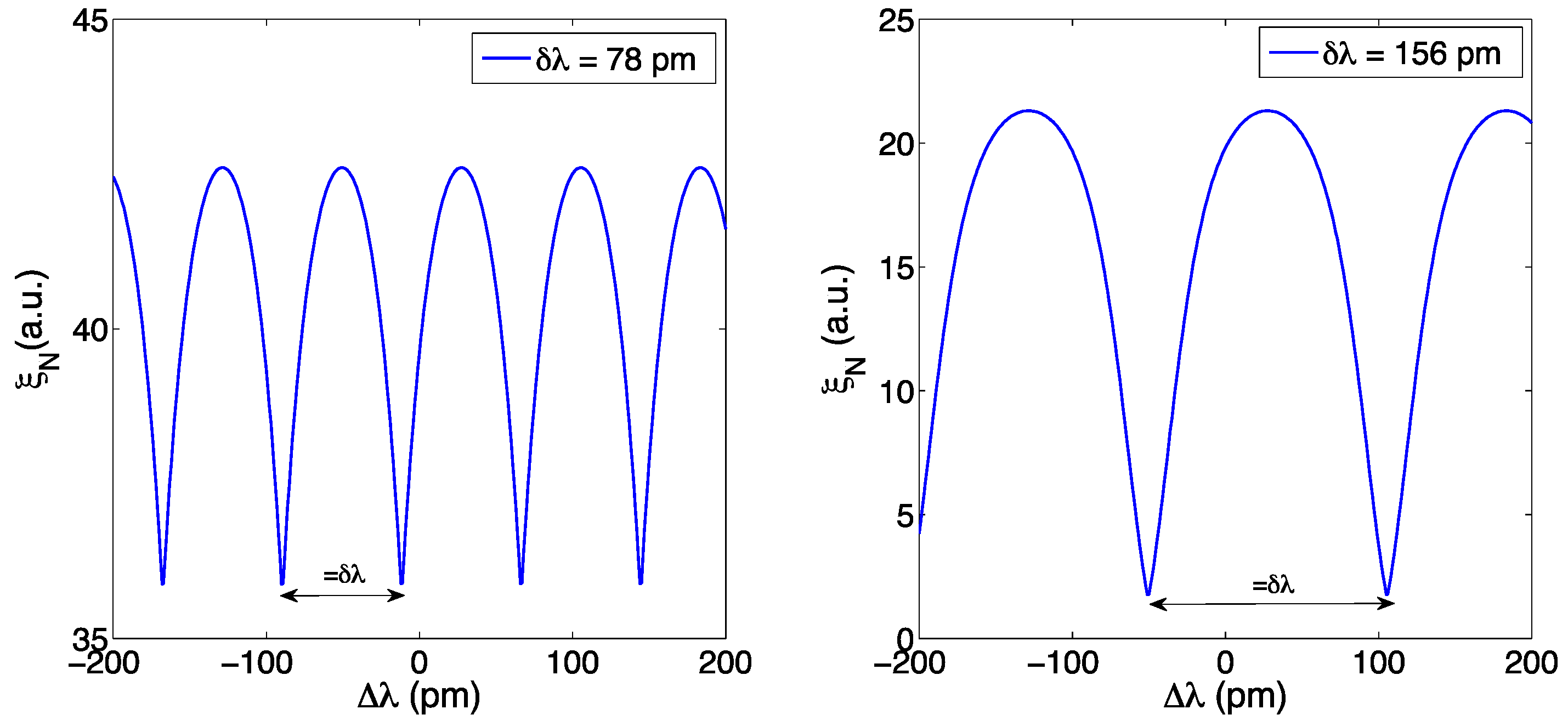
3.5.3. Karhunen-Loeve Transform (KLT)
3.5.4. Capon-KLT
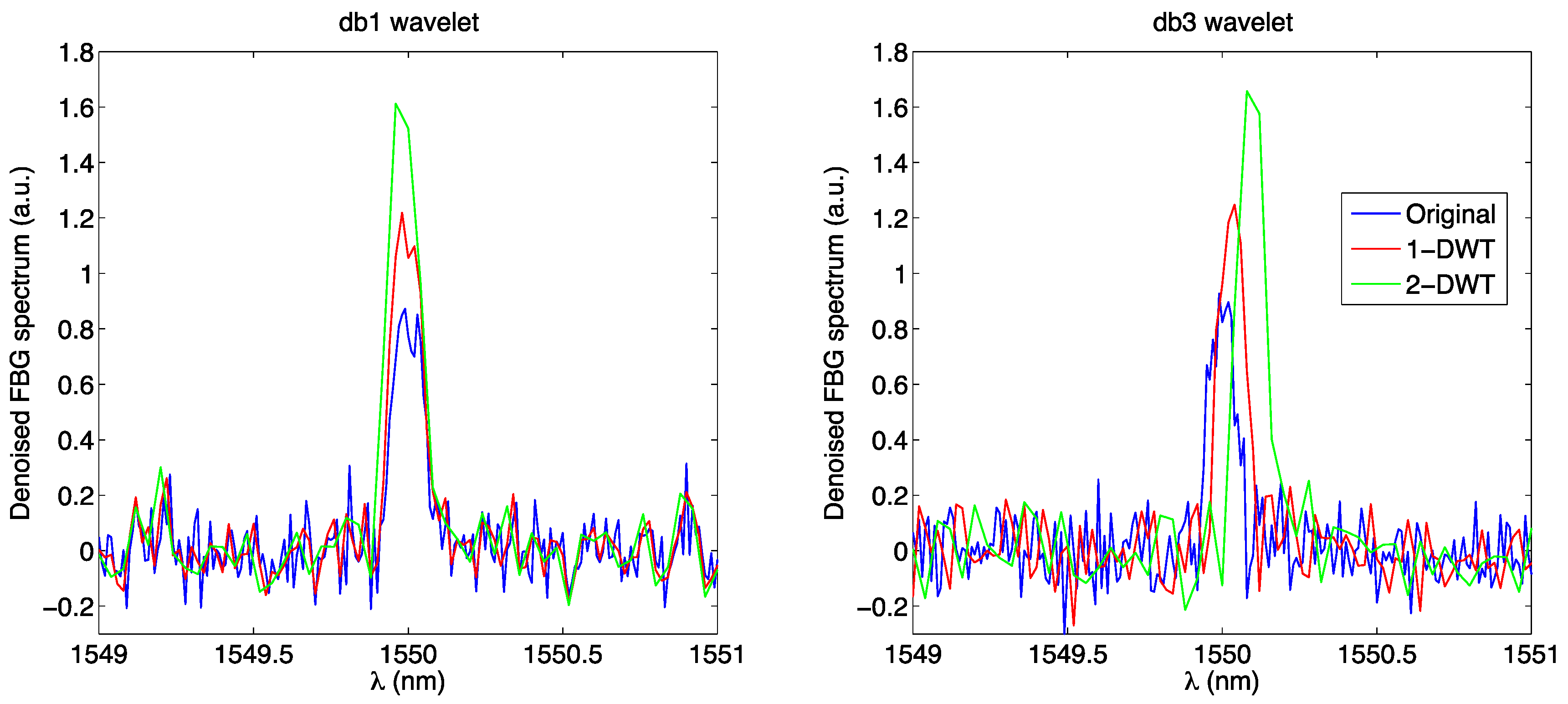
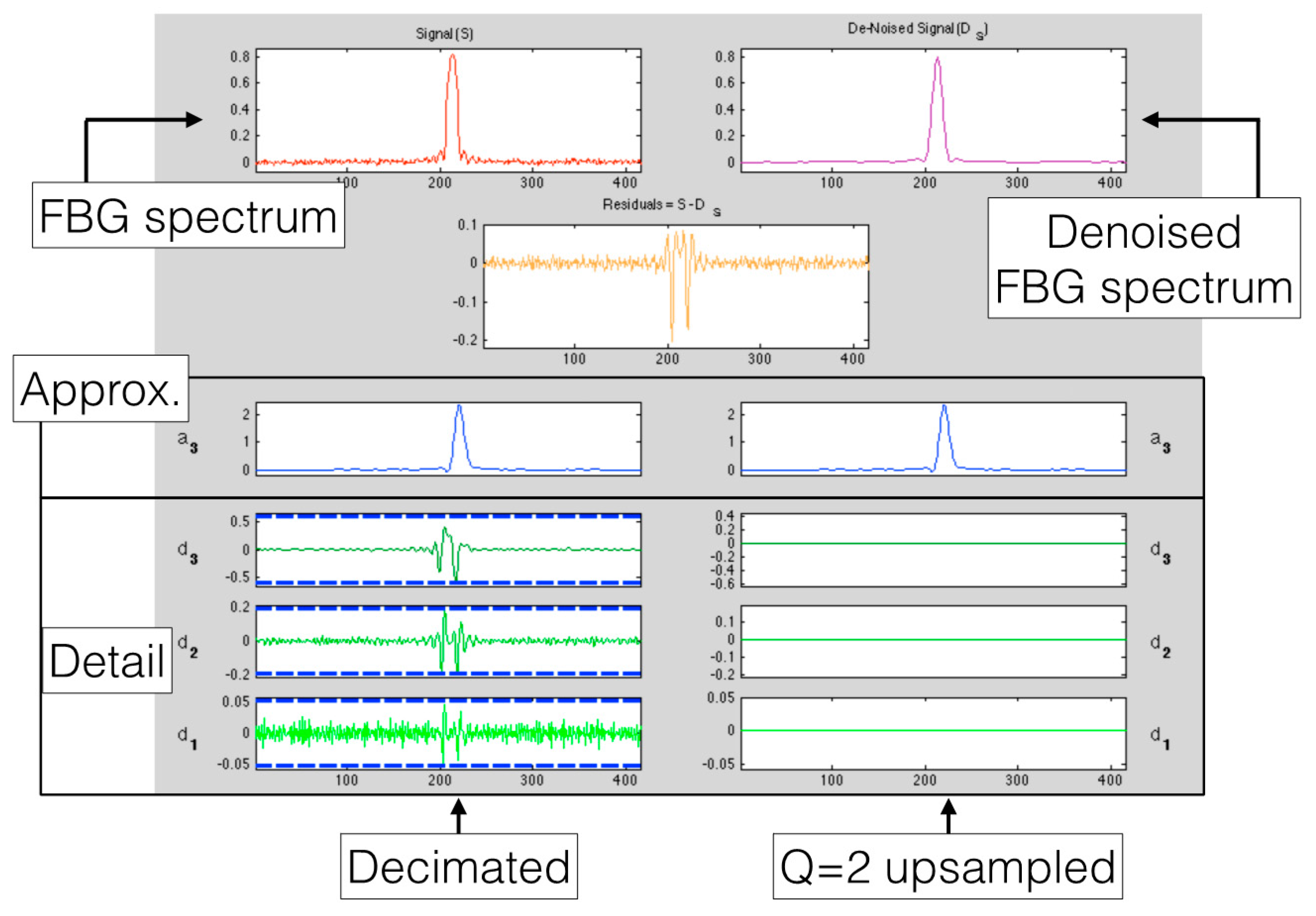
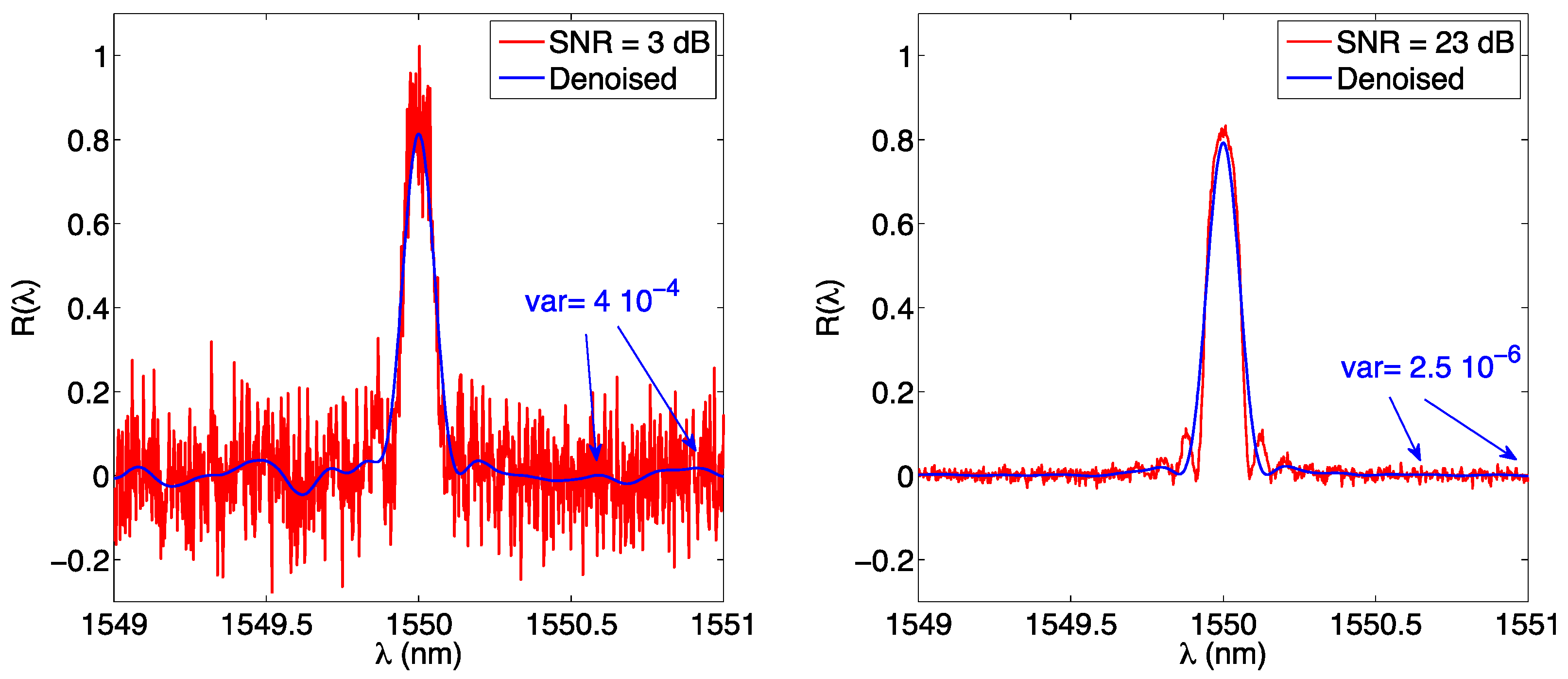
3.5.5. Discrete Wavelet Transform (DWT) Denoising
3.6. Optimization-Based Techniques
3.6.1. Neural Network
3.6.2. Genetic Layer Peeling
4. Performance Analysis of Main Peak Tracking Methods
4.1. Benchmark
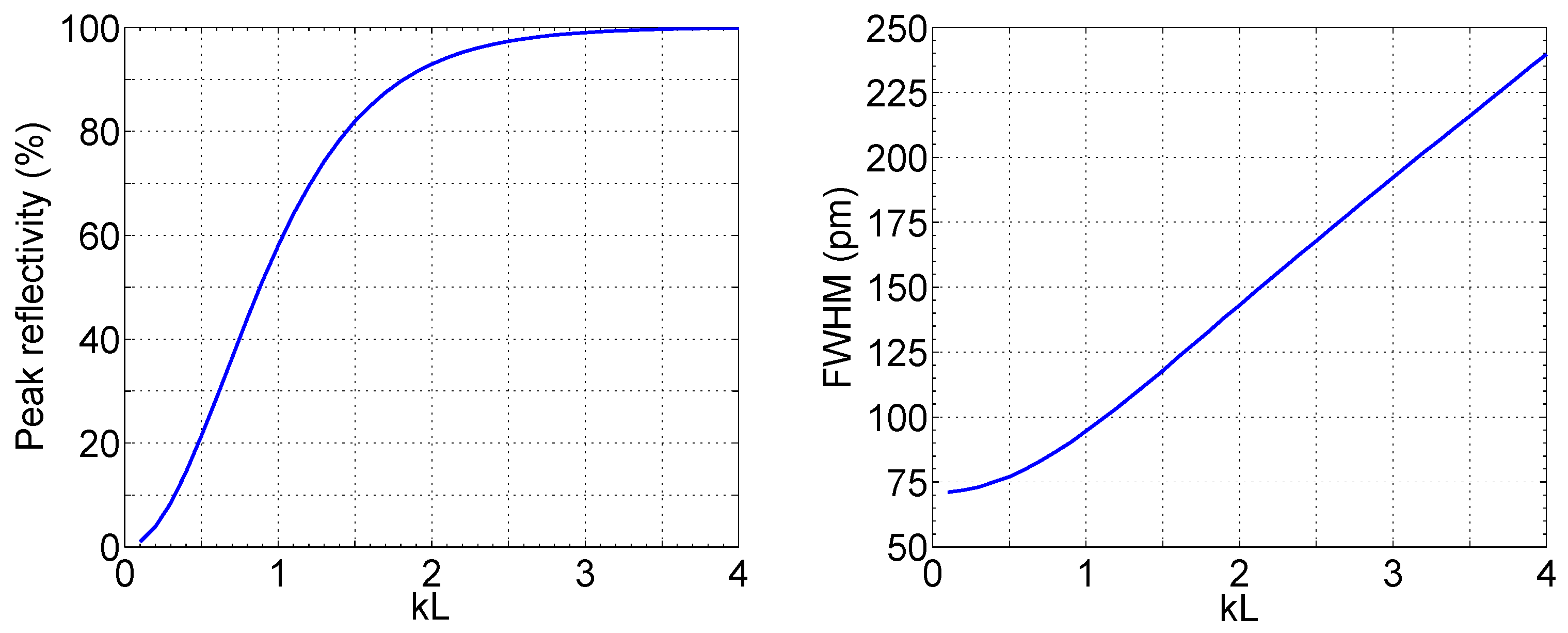
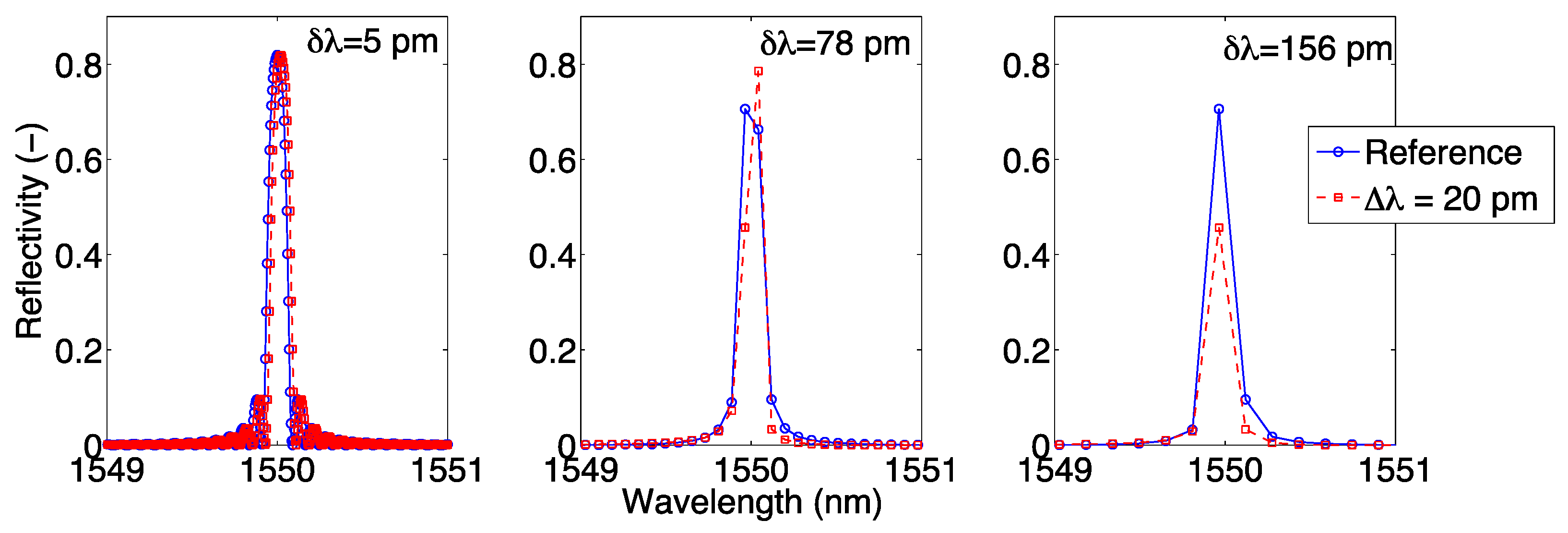
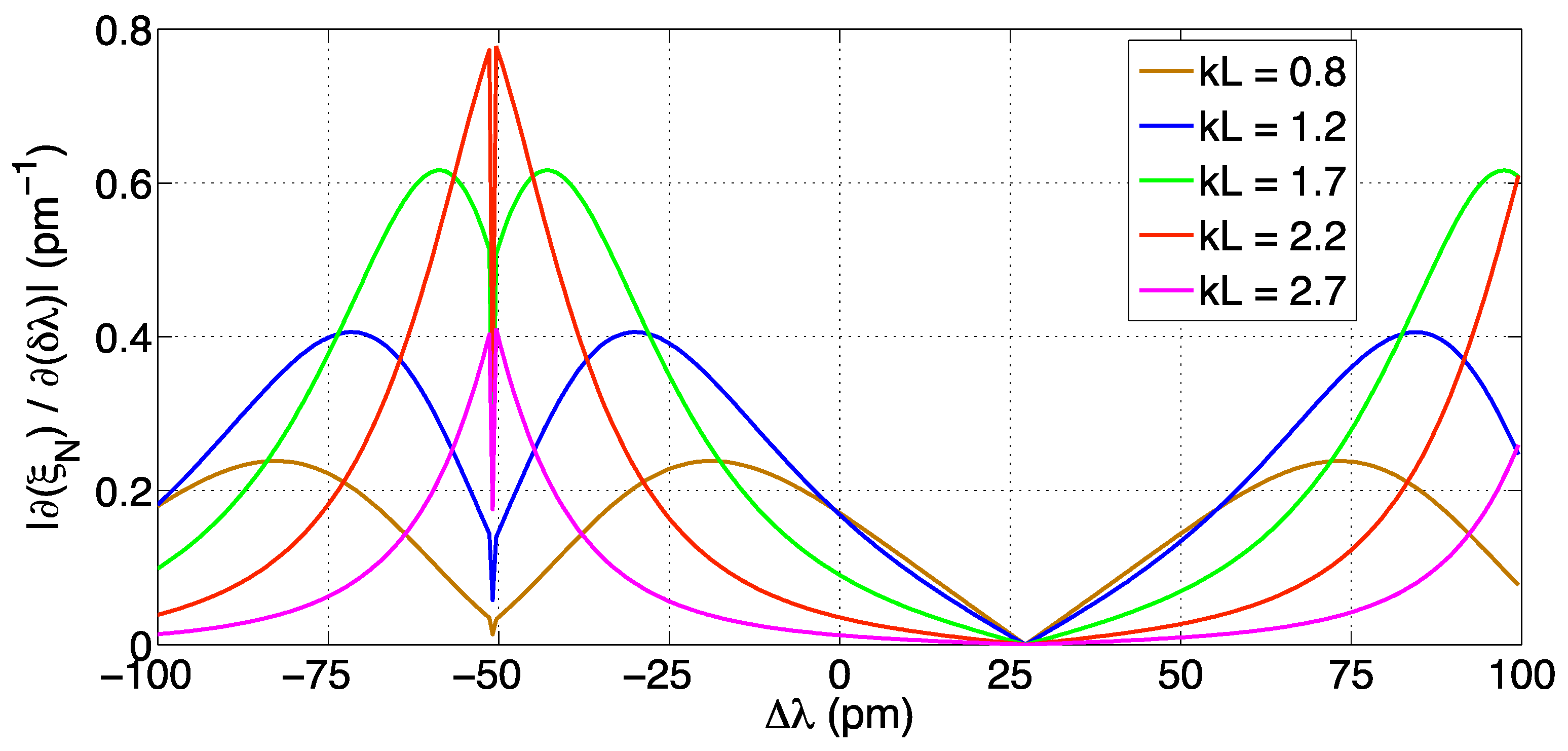
- The original FBG spectrum is generated on a uniformly spaced wavelength grid with spectral resolution δλ using the CMT in Equations (1)–(3). The FBG is generated at the Bragg wavelength λB = 1550 nm, and with the following parameters: L = 1 cm, neff = 1.5, δneff = 10−6. Whenever not explicit, the grating strength is set as kL = 1.5.
- The original spectrum is corrupted by additive white Gaussian (AWG) noise, setting the SNR level.
- The peak tracking method is applied for estimating the Bragg wavelength of the FBG in reference condition λB,ref.
- Steps 1–3 are repeated 100 times: the Bragg wavelength λB,ref is then selected as the average of the 100 estimates; this process helps reducing the uncertainty on the reference Bragg wavelength.
- For n = 1, 2, …, NMC:
- A replica of the original spectrum, having Bragg wavelength by (λB + Δλn) is generated on the same wavelength grid. Each Δλn is randomly generated using a uniform probability density function between −20 pm and +80 pm. This corresponds to the measured spectrum.
- The shifted spectrum is corrupted by AWG noise, with the same SNR as in point 2. This corresponds to the measured spectrum.
- The peak tracking technique is applied on the measured spectrum, estimating the Bragg wavelength λB,e,n.
- The n-th wavelength shift is estimated as: Δλe,n = λB,e,n − λB,ref; this corresponds to the difference between the n-th Bragg wavelength estimate and the Bragg wavelength estimate in reference condition.
- The error in peak tracking is equal to the difference between the estimated and generated wavelength shifts, i.e., en = Δλe,n − Δλ.
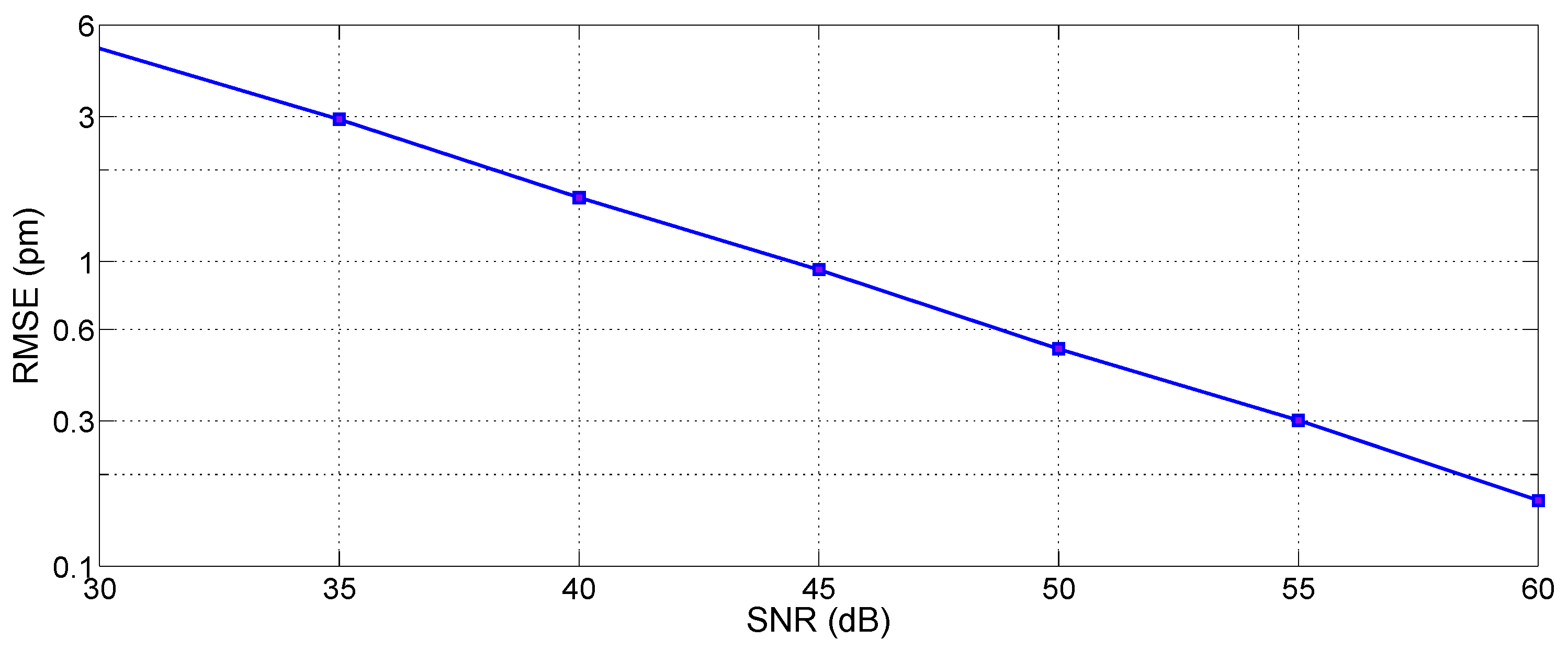
- The root mean square error (RMSE) of the NMC estimates is computed, as a metric of the peak-tracking accuracy.
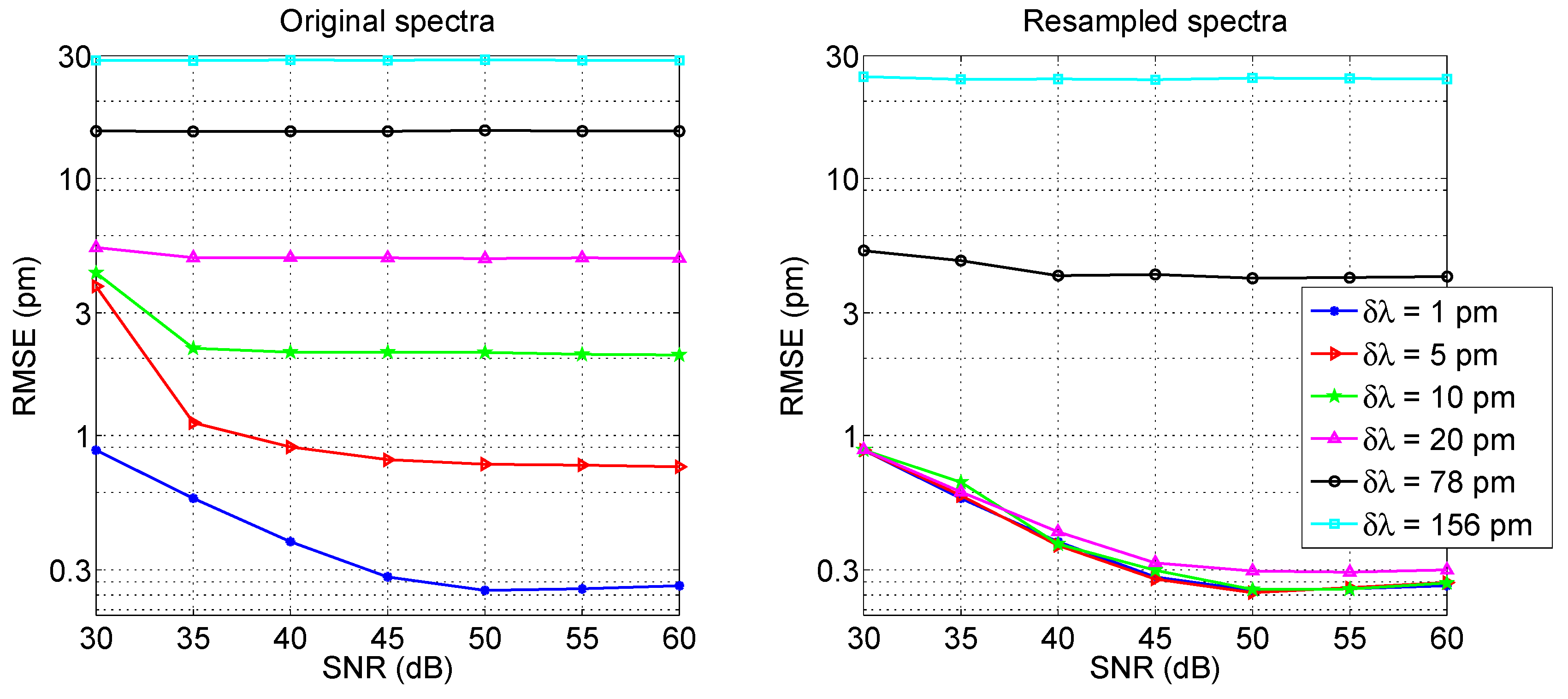
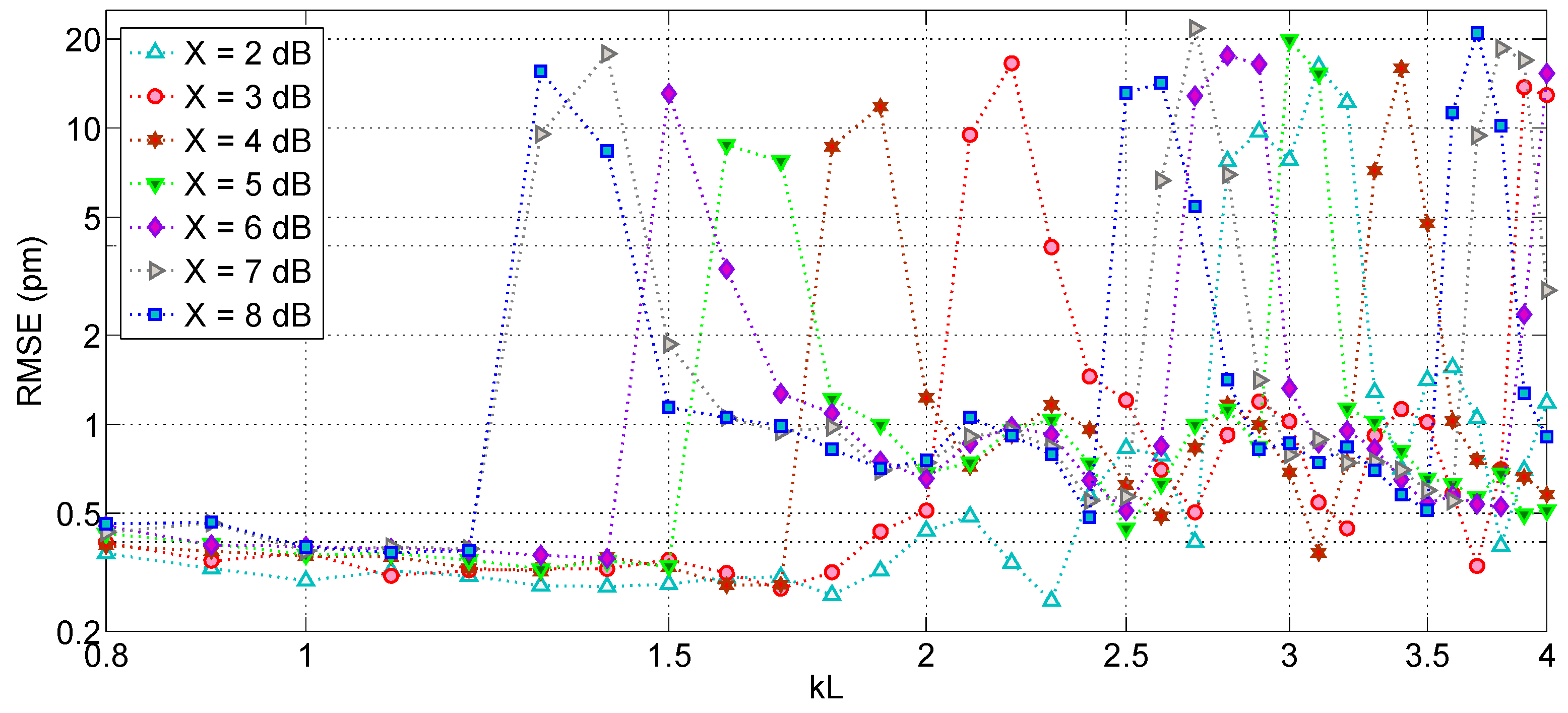
4.2. X-BW Method
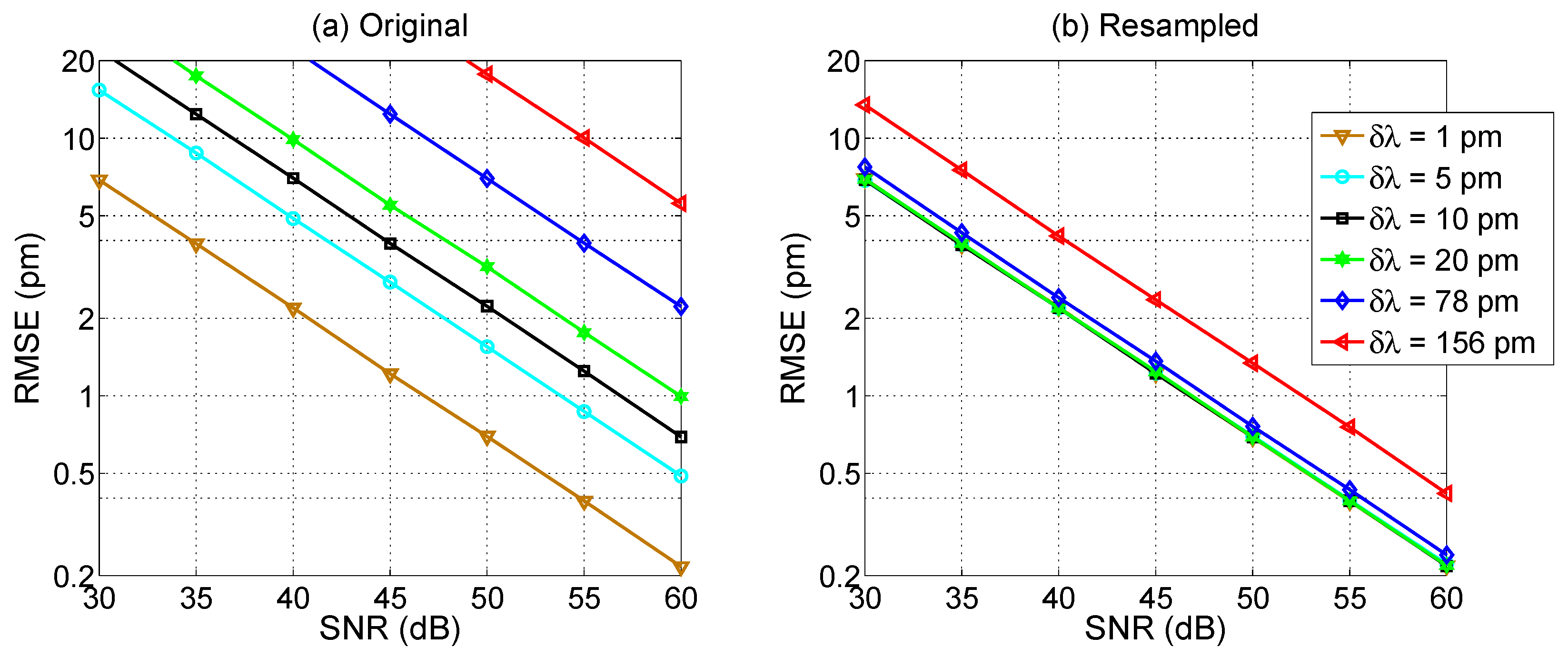
4.3. Centroid Method
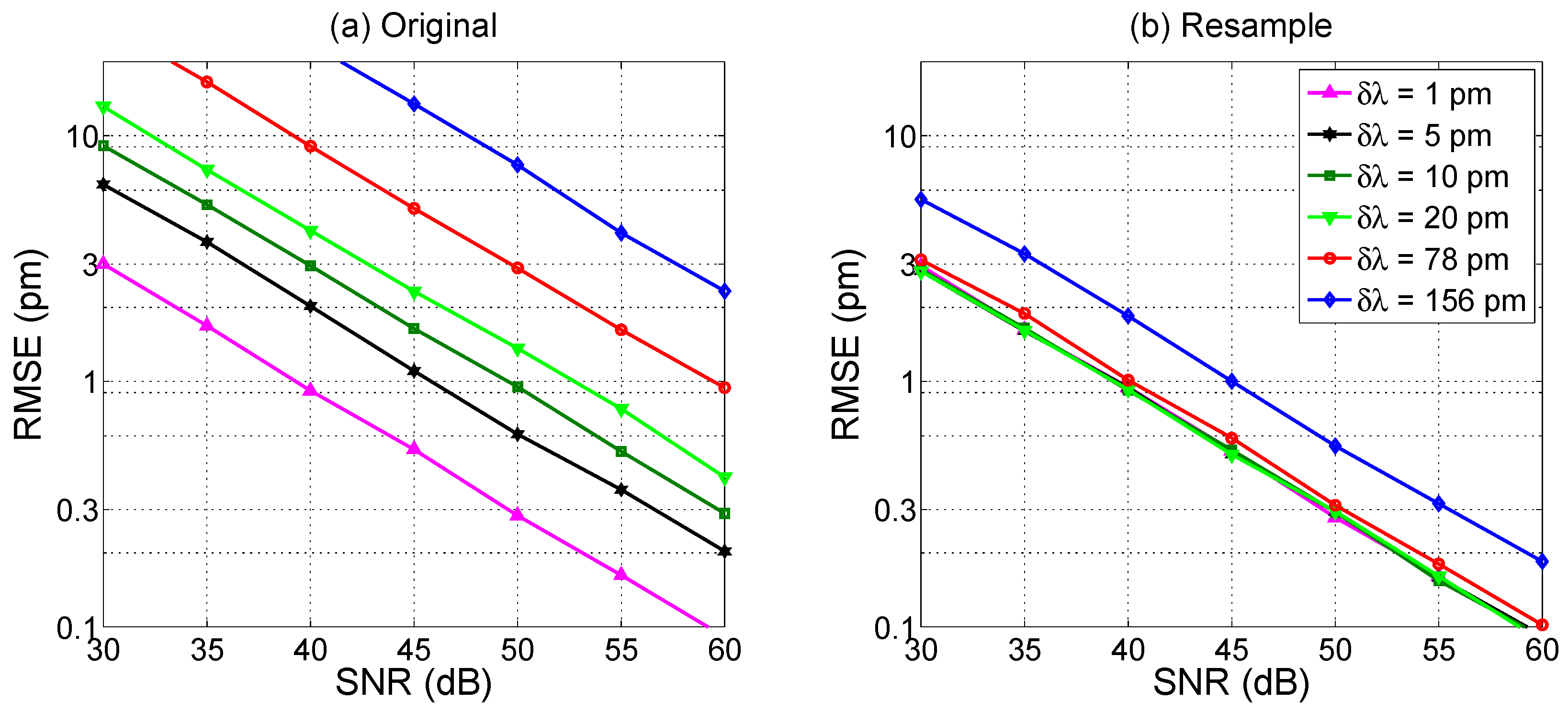
4.4. Second Order Polynomial Fit
4.5. Gaussian Fit
4.6. Spline
4.7. Correlation
4.8. Wavelet
4.9. KLT
5. Discussion
6. Conclusions
Acknowledgments
Conflicts of Interest
References
- Othonos, A.; Kalli, K. Fiber Bragg Gratings: Fundamentals and Applications; Artech House: Boston, MA, USA, 1999. [Google Scholar]
- Meltz, G.; Morey, W.W.; Glenn, W.H. Formation of Bragg gratings in optical fibers by a transverse holographic method. Opt. Lett. 1989, 14, 823–825. [Google Scholar] [CrossRef] [PubMed]
- Rao, Y.J. In-fibre Bragg grating sensors. Meas. Sci. Technol. 1997, 8, 355–375. [Google Scholar] [CrossRef]
- Kersey, A.D.; Davis, M.A.; Patrick, H.J.; LeBlanc, M.; Koo, K.P.; Askins, C.G.; Putnam, M.A.; Friebele, E.J. Fiber grating sensors. J. Lightwave Technol. 1997, 15, 1442–1463. [Google Scholar] [CrossRef]
- Udd, E.; Spillman, W.B. Fiber Optic Sensors: An Introduction for Engineers and Scientists, 2nd ed.; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Kinet, D.; Megret, P.; Goossen, K.W.; Qiu, L.; Heider, D.; Caucheteur, C. Fiber Bragg grating sensors toward structural health monitoring in composite materials: Challenges and solutions. Sensors 2014, 14, 7394–7419. [Google Scholar] [CrossRef] [PubMed]
- Chan, T.H.; Yu, L.; Tam, H.Y.; Ni, Y.Q.; Liu, S.Y.; Chung, W.H.; Cheng, L.K. Fiber Bragg grating sensors for structural health monitoring of Tsing Ma bridge: Background and experimental observation. Eng. Struct. 2006, 28, 648–659. [Google Scholar] [CrossRef]
- Lopez-Higuera, J.M.; Rodriguez Cobo, L.; Quintela Incera, A.; Cobo, A. Fiber optic sensors in structural health monitoring. J. Lightwave Technol. 2011, 29, 587–608. [Google Scholar] [CrossRef]
- Leng, J.; Asundi, A. Structural health monitoring of smart composite materials by using EFPI and FBG sensors. Sens. Actuators A Phys. 2003, 103, 330–340. [Google Scholar] [CrossRef]
- Rezayat, A.; De Pauw, B.; Lamberti, A.; El-Kafafy, M.; Nassiri, V.; Ertveldt, J.; Arroud, G.; Vanlanduit, S.; Guillaume, P. Reconstruction of impacts on a composite plate using fiber Bragg gratings (FBG) and inverse methods. Compos. Struct. 2016, 149, 1–10. [Google Scholar] [CrossRef]
- Brown, G.A.; Hartog, A. Optical fiber sensors in upstream oil & gas. J. Pet. Technol. 2002, 54, 63–65. [Google Scholar]
- Zhao, Y.; Liao, Y.; Lai, S. Simultaneous measurement of down-hole high pressure and temperature with a bulk-modulus and FBG sensor. IEEE Photonics Technol. Lett. 2002, 14, 1584–1586. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, L.; Sun, C.; Yu, Q. Multiplexed fiber-optic pressure and temperature sensor system for down-hole measurement. IEEE Sens. J. 2008, 8, 1879–1883. [Google Scholar] [CrossRef]
- Lamberti, A.; Chiesura, G.; Luyckx, G.; Degrieck, J.; Kaufmann, M.; Vanlanduit, S. Dynamic strain measurements on automotive and aeronautic composite components by means of embedded fiber Bragg grating sensors. Sensors 2015, 15, 27174–271200. [Google Scholar] [CrossRef] [PubMed]
- Schroeder, K.; Ecke, W.; Apitz, J.; Lembke, E.; Lenschow, G. A fibre Bragg grating sensor system monitors operational load in a wind turbine rotor blade. Meas. Sci. Technol. 2006, 17, 1167. [Google Scholar] [CrossRef]
- Dziuda, L.; Skibniewski, F.W.; Krej, M.; Lewandowski, J. Monitoring respiration and cardiac activity using fiber Bragg grating-based sensors. IEEE Trans. Biomed. Eng. 2012, 59, 1934–1942. [Google Scholar] [CrossRef] [PubMed]
- Arkwright, J.W.; Blenman, N.G.; Underhill, I.D.; Maunder, S.A.; Spencer, N.J.; Costa, M.; Brookes, S.J.; Szczesniak, M.M.; Dinning, P.G. Measurement of muscular activity associated with peristalsis in the human gut using fiber Bragg grating arrays. IEEE Sens. J. 2012, 12, 113–117. [Google Scholar] [CrossRef]
- Tosi, D.; Macchi, E.G.; Braschi, G.; Gallati, M.; Cigada, A.; Poeggel, S.; Leen, G.; Lewis, E. Monitoring of radiofrequency thermal ablation in liver tissue through fibre Bragg grating sensors array. Electron. Lett. 2014, 50, 981–983. [Google Scholar] [CrossRef]
- Fernandez, A.F.; Gusarov, A.I.; Bodart, S.; Lammens, K.; Berghmans, F.; Decre, M.; Me, P.; Blondel, M.; Delchambre, A. Temperature monitoring of nuclear reactor cores with multiplexed fiber Bragg grating sensors. Opt. Eng. 2002, 41, 1246–1254. [Google Scholar]
- Mihailov, S.J. Fiber Bragg grating sensors for harsh environments. Sensors 2012, 12, 1898–1918. [Google Scholar] [CrossRef] [PubMed]
- Zhang, B.; Kahrizi, M. High-temperature resistance fiber Bragg grating temperature sensor fabrication. IEEE Sens. J. 2007, 7, 586–591. [Google Scholar] [CrossRef]
- Gu, B.; Qi, W.; Zheng, J.; Zhou, Y.; Shum, P.P.; Luan, F. Simple and compact reflective refractometer based on tilted fiber Bragg grating inscribed in thin-core fiber. Opt. Lett. 2014, 39, 22–25. [Google Scholar] [CrossRef] [PubMed]
- Chah, K.; Kinet, D.; Wuilpart, M.; Megret, P.; Caucheteur, C. Femtosecond-laser-induced highly birefringent Bragg gratings in standard optical fiber. Opt. Lett. 2013, 38, 594–596. [Google Scholar] [CrossRef] [PubMed]
- Poeggel, S.; Duraibabu, D.; Tosi, D.; Leen, G.; Lewis, E.; Lacraz, A.; Hambalis, M.; Koutsides, C.; Kalli, K. Novel FBG femtosecond laser inscription method for improved FPI sensors for medical applications. In Proceedings of the IEEE Sensors Conference, Valencia, Spain, 2–5 November 2014. [Google Scholar]
- Lindner, E.; Hartung, A.; Hoh, D.; Chojetzki, C.; Schuster, K.; Bierlich, J.; Rothhardt, M. Trends and future of fiber Bragg grating sensing technologies: Tailored draw tower gratings (DTGs). In Proceedings of the SPIE Photonics Europe, Brussels, Belgium, 14–17 April 2014. [Google Scholar]
- Jiang, Y.; Ding, W. Recent developments in fiber optic spectral white-light interferometry. Photonic Sens. 2011, 1, 62–71. [Google Scholar] [CrossRef]
- Bayspec FBGA. Available online: http://www.bayspec.com/telecom-fiber-sensing/fbga-systems/ (accessed on 28 August 2017).
- FBGS International. FBGG-Scan Interrogators. Available online: http://www.fbgs.com/products/measurement-devices/fbg-scan-704d/804d/ (accessed on 28 August 2017).
- Ibsen Photonics. Interrogation Monitors. Available online: http://www.ibsenphotonics.com (accessed on 28 August 2017).
- Kwon, Y.S.; Ko, M.O.; Jung, M.S.; Park, I.G.; Kim, N.; Han, S.P.; Ryu, H.C.; Park, K.H.; Jeon, M.Y. Dynamic sensor interrogation using wavelength-swept laser with a polygon-scanner-based wavelength filter. Sensors 2013, 13, 9669–9678. [Google Scholar] [CrossRef] [PubMed]
- Yun, S.H.; Richardson, D.J.; Kim, B.Y. Interrogation of fiber grating sensor arrays with a wavelength-swept fiber laser. Opt. Lett. 1998, 23, 843–845. [Google Scholar] [CrossRef] [PubMed]
- Mohanty, L.; Koh, L.M.; Tjin, S.C. Fiber Bragg grating microphone system. Appl. Phys. Lett. 2006, 89, 161109. [Google Scholar] [CrossRef]
- Bezombes, F.A.; Lalor, M.J.; Burton, D.R. Contact microphone using optical fibre Bragg grating technology. J. Phys. Conf. Ser. 2007, 76, 012017. [Google Scholar] [CrossRef]
- Wilson, A.; James, S.W.; Tatam, R.P. Time-division-multiplexed interrogation of fibre Bragg grating sensors using laser diodes. Meas. Sci. Technol. 2001, 12, 181–187. [Google Scholar] [CrossRef]
- Tosi, D.; Olivero, M.; Perrone, G. Low-cost fiber Bragg grating vibroacoustic sensor for voice and heartbeat detection. Appl. Opt. 2008, 47, 5123–5129. [Google Scholar] [CrossRef] [PubMed]
- Micron Optics. Interrogators. Available online: http://www.micronoptics.com (accessed on 28 August 2017).
- HBM Fibersensing. Braggmeter. Available online: https://www.hbm.com/en/2322/optical-interrogators-from-hbm-fibersensing/ (accessed on 28 August 2017).
- Erdogan, T. Fiber grating spectra. J. Lightwave Technol. 1997, 15, 1277–1294. [Google Scholar] [CrossRef]
- Sercalo. MEMS Switches. Available online: http://www.sercalo.com (accessed on 28 August 2017).
- Negri, L.; Nied, A.; Kalinowski, H.; Paterno, A. Benchmark for peak detection algorithms in fiber Bragg grating interrogation and a new neural network for its performance improvement. Sensors 2011, 11, 3466–3482. [Google Scholar] [CrossRef] [PubMed]
- Dyer, S.D.; Williams, P.A.; Espejo, R.J.; Kofler, J.D.; Etzel, S.M. Fundamental limits in fiber Bragg grating peak wavelength measurements. Proc. SPIE 2005, 5855, 88–93. [Google Scholar]
- Bodendorfer, T.; Muller, M.; Hirth, F.; Koch, A. Comparison of different peak detection algorithms with regards to spectrometric fiber Bragg grating interrogation systems. Proceedings of International Symposium on Optomechatronic Technologies (ISOT), Istanbul, Turkey, 21–23 September 2009. [Google Scholar]
- Lamberti, A.; Vanlanduit, S.; De Pauw, B.; Berghmans, F. Influence of fiber Bragg grating spectrum degradation on the performance of sensor interrogation algorithms. Sensors 2014, 14, 24258–24277. [Google Scholar] [CrossRef] [PubMed]
- Lamberti, A.; Vanlanduit, S.; De Pauw, B.; Berghmans, F. Peak detection in fiber Bragg grating using a fast phase correlation algorithm. Proc. SPIE 2014, 9141. [Google Scholar] [CrossRef]
- Kersey, A.D.; Morey, W.W.; Berkoff, T.A. Fiber-optic Bragg grating strain sensor with drift-compensated high-resolution interferometric wavelength-shift detection. Opt. Lett. 1993, 18, 72–74. [Google Scholar] [CrossRef] [PubMed]
- Ezbiri, A.; Kanellopoulos, S.E.; Handerek, V.A. High resolution instrumentation system for fiber-Bragg grating aerospace sensors. Opt. Commun. 1998, 150, 43–48. [Google Scholar] [CrossRef]
- Posseti, G.R.C.; Kamikawachi, R.C.; Muller, M.; Fabris, J.L. Metrological evaluation of optical fiber grating-based sensors: An approach toward the standardization. J. Lightwave Technol. 2002, 30, 1042–1052. [Google Scholar] [CrossRef]
- Tosi, D.; Olivero, M.; Perrone, G. Performance analysis of peak tracking techniques for fiber Bragg grating interrogation systems. J. Microw. Optoelectron. Electromagn. Appl. 2012, 11, 252–262. [Google Scholar] [CrossRef]
- Gill, A.; Peters, K.; Studer, M. Genetic algorithm for the reconstruction of Bragg grating sensor strain profiles. Meas. Sci. Technol. 2004, 15, 1877. [Google Scholar] [CrossRef]
- Jiang, J.; Liu, T.; Liu, K.; Zhang, Y. Investigation of peak wavelength detection of fiber Bragg grating with sparse spectral data. Opt. Eng. 2012, 51, 034403. [Google Scholar] [CrossRef]
- Harasim, D.; Gulbahar, Y. Improvement of FBG peak wavelength demodulation using digital signal processing algorithms. In Proceedings of the XXXVI Symposium on Photonics Applications in Astronomy, Communications, Industry, and High-Energy Physics Experiments, Wilga, Poland, 11 September 2015. [Google Scholar]
- Skaar, J.; Wang, L.; Erdogan, T. On the synthesis of fiber Bragg gratings by layer peeling. J. Lightwave Technol. 2001, 37, 165–173. [Google Scholar] [CrossRef]
- Skaar, J.; Risvik, K.M. A genetic algorithm for the inverse problem in synthesis of fiber gratings. J. Lightwave Technol. 1998, 16, 1928–1932. [Google Scholar] [CrossRef]
- Johnson, D. Novel Optical Fibers-Draw-tower process creates high-quality FBG arrays. Laser Focus World 2012, 48, 53. [Google Scholar]
- Micron Optics. Enlight Software. Available online: http://www.micronoptics.com/products/sensing-solutions/software/ (accessed on 28 August 2017).
- Atkins, C.G.; Putnam, M.A.; Friebele, E.J. Instrumentation for interrogating many-element fiber Bragg grating arrays. Proc. SPIE 1995, 2444, 257–267. [Google Scholar]
- Chen, W.; Vallan, A. Applications of a Fast FBG Interrogation System for Real-Time Thermal and Structural Monitoring. In Proceedings of the IEEE 1st International Forum on Research and Technologies for Society and Industry: Leveraging a Better Tomorrow (RTSI), Turin, Italy, 16–18 September 2015; pp. 388–391. [Google Scholar]
- Lee, H.W.; Park, H.J.; Lee, J.H.; Song, M. Accuracy improvement in peak positioning of spectrally distorted fiber Bragg grating sensors by Gaussian curve fitting. Appl. Opt. 2007, 46, 2205–2208. [Google Scholar] [CrossRef] [PubMed]
- De Sousa, M.J.; Costa, J.C.; De Souza, R.M.; Pantoja, R.V. FBG optimization using spline encoded evolution strategy. J. Microw. Optoelectron. Electromagn. Appl. 2011, 10, 165–178. [Google Scholar] [CrossRef]
- Caucheteur, C.; Chah, K.; Lhomme, F.; Blondel, M.; Megret, P. Autocorrelation demodulation technique for fiber Bragg grating sensor. IEEE Photonics Technol. Lett. 2004, 16, 2320–2322. [Google Scholar] [CrossRef]
- Gong, J.M.; MacAlpine, J.M.; Chan, C.C.; Jin, W.; Zhang, M.; Liao, Y.B. A novel wavelength detection technique for fiber Bragg grating sensors. IEEE Photonics Technol. Lett. 2002, 14, 678–680. [Google Scholar] [CrossRef]
- Gong, J.M.; Chan, C.C.; Jin, W.; MacAlpine, J.M.K.; Zhang, M.; Liao, Y.B. Enhancement of wavelength detection accuracy in fiber Bragg grating sensors by using a spectrum correlation technique. Opt. Commun. 2002, 212, 29–33. [Google Scholar] [CrossRef]
- Huang, C.; Jing, W.; Liu, K.; Zhang, Y.; Peng, G. Demodulation of fiber Bragg grating sensor using cross-correlation algorithm. IEEE Photonics Technol. Lett. 2007, 19, 707–709. [Google Scholar] [CrossRef]
- Lamberti, A.; Vanlanduit, S.; de Pauw, B.; Berghmans, F. A novel fast phase correlation algorithm for peak wavelength detection of fiber Bragg grating sensors. Opt. Express 2014, 22, 7099–7112. [Google Scholar] [CrossRef] [PubMed]
- Tosi, D. KLT-based algorithm for sub-pm accurate FBG tracking with coarse wavelength sampling. Photonics Technol. Lett. 2015, 27, 2134–2137. [Google Scholar] [CrossRef]
- Tosi, D. Advanced interrogation of fiber-optic Bragg grating and Fabry-Perot sensors with KLT analysis. Sensors 2015, 15, 27470–27492. [Google Scholar] [CrossRef] [PubMed]
- Hervás, J.; Tosi, D.; García-Miquel, H.; Barrera, D.; Fernández-Pousa, C.R.; Sales, S. KLT-Based Interrogation technique for FBG multiplexed sensor tracking. J. Lightwave Technol. 2017, 35, 3387–3392. [Google Scholar] [CrossRef]
- Tosi, D. Improved KLT Algorithm for high-precision wavelength tracking of optical fiber bragg grating sensors. J. Sens. 2017, 2017. [Google Scholar] [CrossRef]
- Wong, A.C.; Peng, G.D. Applications of Discrete Wavelet Transform in Optical Fibre Sensing. Available online: https://www.intechopen.com/books/discrete-wavelet-transforms-biomedical-applications/applications-of-discrete-wavelet-transform-in-optical-fibre-sensing (accessed on 17 October 2017).
- Zhaoxia, W.; Haili, Y. Fiber Bragg Grating Peak Wavelength Detection Technique Based on Wavelet Analysis. In Proceedings of the IEEE International Conference on Internet Computing & Information Services (ICICIS), Hong Kong, China, 17–18 September 2011; pp. 462–464. [Google Scholar]
- Paterno, A.S.; Silva, J.C.C.; Milczewski, M.S.; Arruda, L.V.R.; Kalinowski, H.J. Radial-basis function network for the approximation of FBG sensor spectra with distorted peaks. Meas. Sci. Technol. 2006, 17, 1039–1045. [Google Scholar] [CrossRef]
- Chan, C.C.; Shi, C.Z.; Jin, W.; Wang, D.N. Improving the wavelength detection accuracy of FBG sensors using an ADALINE network. IEEE Photonic Technol. Lett. 2003, 15, 1126–1128. [Google Scholar] [CrossRef]
- Geiman, B.; Bohs, L.; Anderson, M.; Breit, S.; Trahey, G. A Comparison of Algorithms for Tracking Sub-pixel Speckle Motion. In Proceedings of the IEEE Ultrasonics Symposium, Toronto, ON, Canada, 5–8 October 1997; pp. 1239–1242. [Google Scholar]
- Liu, Q.; Qiao, X.; Jia, Z.A.; Fu, H. Spectra power and bandwidth of fiber Bragg grating under influence of gradient strain. Photonic Sens. 2016, 6, 333–338. [Google Scholar] [CrossRef]
- Matlab, Mathworks. Curve Fitting Toolbox. Available online: https://www.mathworks.com/products/curvefitting.html (accessed on 28 August 2017).
- Lancaster, P.; Salkauskas, K. Curve and Surface Fitting: An Introduction; Academic Press: Cambridge, MA, USA, 1986. [Google Scholar]
- Dierckx, P. Curve and Surface Fitting with Splines; Oxford University Press: New York, NY, USA, 1995. [Google Scholar]
- Guo, H. A simple algorithm for fitting a gaussian function [DSP tips and tricks]. IEEE Signal Proc. Mag. 2011, 28, 134–137. [Google Scholar] [CrossRef]
- Cuche, E.; Marquet, P.; Depeursinge, C. Aperture apodization using cubic spline interpolation: Application in digital holographic microscopy. Opt. Commun. 2000, 182, 59–69. [Google Scholar] [CrossRef]
- Bartels, R.H.; Beatty, J.C.; Barsky, B.A. An Introduction to Splines for Use in Computer Graphics and Geometric Modeling; Morgan Kaufmann: San Francisco, CA, USA, 1987. [Google Scholar]
- Yap, B.W.; Rani, K.A.; Rahman, H.A.; Fong, S.; Khairudin, Z.; Abdullah, N.N. An Application of Oversampling, Undersampling, Bagging and Boosting in Handling Imbalanced Datasets. In Proceedings of the First International Conference on Advanced Data and Information Engineering (DaEng-2013), Singapore, 2014; pp. 13–22. [Google Scholar]
- Rothweiler, J. Polyphase quadrature filters—A new subband coding technique. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Boston, MA, USA, 14–16 April 1983; Volume 8, pp. 1280–1283. [Google Scholar]
- Clark, C.L. LabVIEW Digital Signal Processing; Tata McGraw-Hill Education: New York, NY, USA, 2005. [Google Scholar]
- Harris, F.J.; Dick, C.; Rice, M. Digital receivers and transmitters using polyphase filter banks for wireless communications. IEEE Trans. Microw. Theory Tech. 2003, 41, 1395–1412. [Google Scholar] [CrossRef]
- Vetterli, M. Multi-dimensional sub-band coding: Some theory and algorithms. Signal Process. 1984, 6, 97–112. [Google Scholar] [CrossRef]
- Wang, Y.; Negri, L.H.; Cervi, G.; De Oliveira, V.; Kalinowski, H.J.; Paterno, A.S. Multiplexed FBG Optical Instrumentation Using an FPGA-Based System. In Proceedings of the Latin America Optics and Photonics Conference, Sao Sebastiao, Brazil, 10–13 November 2012. [Google Scholar]
- Eckstein, A.C.; Charonko, J. Phase correlation processing for DPIV measurements. Exp. Fluids 2008, 45, 485–500. [Google Scholar] [CrossRef]
- Beraldin, J.A.; Cournoyer, L.; Rioux, M.; Blais, F.; El-Hakim, S.F.; Godin, G. Object model creation from multiple range images: Acquisition, calibration, model building and verification. In Proceedings of the International Conference on Recent Advances in 3-D Digital Imaging and Modeling, Ottawa, ON, Canada, 12–15 May 1997; pp. 326–333. [Google Scholar]
- Stewart, S.; Ivy, M.A.; Anslyn, E.V. The use of principal component analysis and discriminant analysis in differential sensing routines. Chem. Soc. Rev. 2014, 43, 70–84. [Google Scholar] [CrossRef] [PubMed]
- Maccone, C. Advantages of Karhunen-Loeve transform over fast Fourier transform for planetary radar and space debris detection. Acta Astronaut. 2005, 60, 775–779. [Google Scholar] [CrossRef]
- Maccone, C. Telecommunications, KLT and Relativity; IPI Press: Colorado Springs, CO, USA, 1994. [Google Scholar]
- Zaknich, A. Principles of Adaptive Filters and Self-Learning Systems; Springer: Berlin, Germany, 2006. [Google Scholar]
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE 1969, 57, 1408–1418. [Google Scholar] [CrossRef]
- Gangopadhyay, T.K.; Chakravorti, S.; Bhattacharya, K.; Chatterjee, S. Wavelet analysis of optical signal extracted from a non-contact fibre-optic vibration sensor using an extrinsic Fabry-Perot interferometer. Meas. Sci. Technol. 2005, 16, 1075. [Google Scholar] [CrossRef]
- Daubechies, I. Ten Lectures on Wavelets; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1992. [Google Scholar]
- Matlab, Mathworks. Wavelet Toolbox. Available online: https://www.mathworks.com/products/wavelet.html (accessed on 28 August 2017).
- Omondi, A.R.; Rajapakse, J.C. FPGA Implementations of Neural Networks; Springer: New York, NY, USA, 2006. [Google Scholar]
- Shi, C.Z.; Chan, C.C.; Jin, W.; Liao, Y.B.; Zhou, Y.; Demokan, M.S. Improving the performance of a FBG sensor network using a genetic algorithm. Sens. Actuators A Phys. 2003, 107, 57–61. [Google Scholar] [CrossRef]
- Robert, C.P. Monte Carlo Methods; John Wiley & Sons, Ltd.: New York, NY, USA, 2004. [Google Scholar]
- Benedetto, S.; Biglieri, E. Principles of Digital Transmis-Sion with Wireless Applications; Kluwer Academic: Norwell, MA, USA, 1999; pp. 381–426. [Google Scholar]
- Chung, W.H.; Tam, H.-Y.; Wai, P.K.A.; Khandelwal, A. Time-and wavelength-division multiplexing of FBG sensors using a semiconductor optical amplifier in ring cavity configuration. IEEE Photonics Technol. Lett. 2005, 17, 2709–2711. [Google Scholar] [CrossRef]
- Kim, S.; Kwon, J.; Kim, S.; Lee, B. Multiplexed strain sensor using fiber grating-tuned fiber laser with a semiconductor optical amplifier. IEEE Photonics Technol. Lett. 2001, 13, 350–351. [Google Scholar]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Method | Main References |
|---|---|---|
| Direct | Maximum | [41,42] |
| X-dB bandwidth | [42,47,55] | |
| Centroid | [41,42,46,56] | |
| Curve fitting | 2nd order polynomial | [42,46] |
| Gaussian→polynomial | [57] | |
| Gaussian fit | [58] | |
| High-order polynomial | [40,42] | |
| Spline | [42,59] | |
| Correlation | Wavelength shifted correl. | [48,60] |
| Cross-correlation | [61,62] | |
| Correlation→polynomial | [63] | |
| Oversampling 1 | Upsampling | [48,55] |
| Resampling | [48,55] | |
| Transform | Fast phase correlation | [44,64] |
| Linear-phase operator | [42] | |
| Karhunen-Loeve Transform | [65,66,67] | |
| Capon-KLT | [68] | |
| Wavelet | [69,70] | |
| Optimization | Neural network | [40,71,72] |
| Genetic layer peeling | [49,53] |
© 2017 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tosi, D. Review and Analysis of Peak Tracking Techniques for Fiber Bragg Grating Sensors. Sensors 2017, 17, 2368. https://doi.org/10.3390/s17102368
Tosi D. Review and Analysis of Peak Tracking Techniques for Fiber Bragg Grating Sensors. Sensors. 2017; 17(10):2368. https://doi.org/10.3390/s17102368
Chicago/Turabian StyleTosi, Daniele. 2017. "Review and Analysis of Peak Tracking Techniques for Fiber Bragg Grating Sensors" Sensors 17, no. 10: 2368. https://doi.org/10.3390/s17102368
APA StyleTosi, D. (2017). Review and Analysis of Peak Tracking Techniques for Fiber Bragg Grating Sensors. Sensors, 17(10), 2368. https://doi.org/10.3390/s17102368